

9.2. Баланс мощностей и энергетические характеристики электропривода
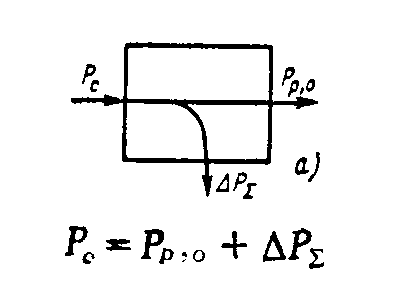
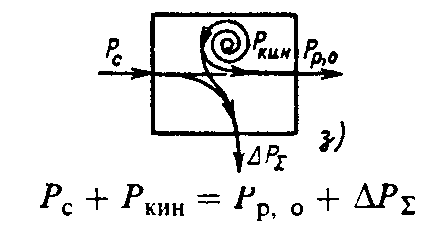
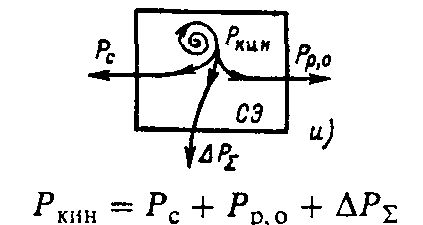
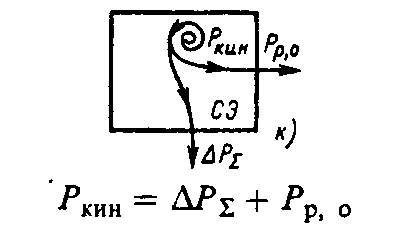
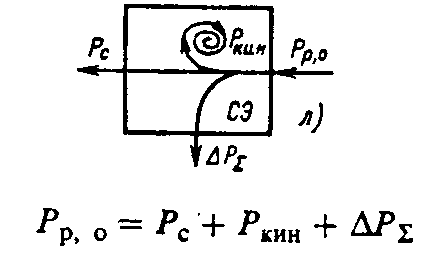
Баланс мощностей в электромеханической системе однодвигательного электропривода можно представить в виде равенства
 (9.1)
(9.1)
и соответствующей ему схемы на рис. 9.1.
Мощность электрической энергии, поступающей из сети на вход электропривода, обозначена Рс.Будем считать ее направление положительным, когда энергия поступает от сети или другого источника питания в систему электропривода, и отрицательным, если направление энергии обратное. Доля мощности, расходуемая на реализацию движения рабочего органа механизма, преодоление сил статического сопротивления, есть Рр,о= Мр,ор,о. Она положительна, если энергия направлена к рабочему органу.
Мощность Рр,оможет быть связана с преодолением
реактивных сил на рабочем органе или
активных, когда осуществляется привод,
например, подъемного механизма. В
последнем случае мощность Рр,.очастично или полностью идет на увеличение
потенциальной энергии поднимаемого
груза![]() .
Наличие в системе, как в механической
части, так и в электрической, элементов,
способных запасать энергию, определяет
в (9.1) наличие составляющих, равных долям
мощности, связанных с изменением энергии
этих элементов.
.
Наличие в системе, как в механической
части, так и в электрической, элементов,
способных запасать энергию, определяет
в (9.1) наличие составляющих, равных долям
мощности, связанных с изменением энергии
этих элементов.
Так, величина
![]() определяет
мощность, которая идет на изменение
кинетической энергии движущихся
элементов механической части. Мощность,
которая идет на изменение потенциальной
энергии деформируемых элементов
механической части, есть
определяет
мощность, которая идет на изменение
кинетической энергии движущихся
элементов механической части. Мощность,
которая идет на изменение потенциальной
энергии деформируемых элементов
механической части, есть![]() .
Если в процессе движения механизма или
машины происходит изменение потенциальной
энергии
.
Если в процессе движения механизма или
машины происходит изменение потенциальной
энергии
элементов, то
определяемая этим доля мощности
![]() .
.
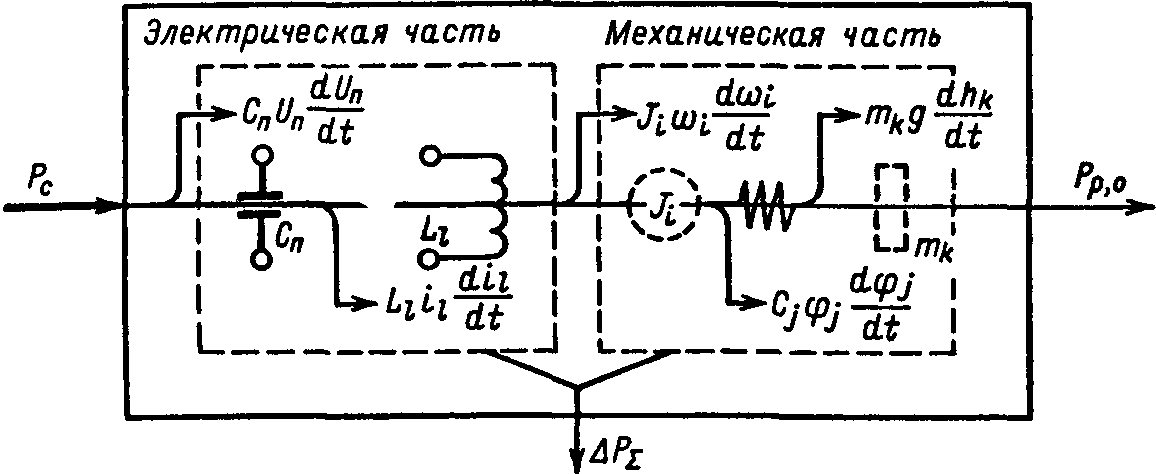
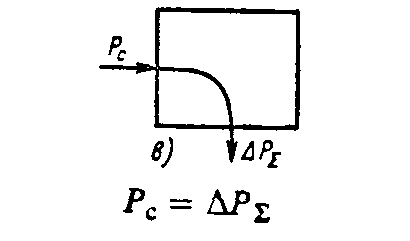
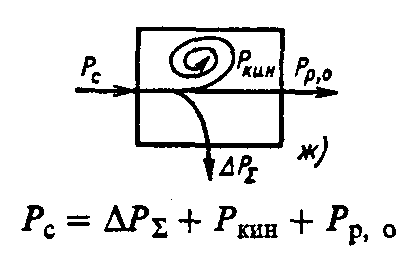
Рис. 9.1. Баланс мощностей в системе электропривода
В электрической
части энергия может запасаться в
индуктивных и емкостных/'элементах,
при этом изменение суммарной энергии
в индуктивных и емкостных элементах
определяется соответственно долями
мощности, равными![]() и
и![]() .В общем случае каждая из этих составляющих
может быть положительной или отрицательной,
что определяется направлением энергии
по отношению к соответствующему элементу.
.В общем случае каждая из этих составляющих
может быть положительной или отрицательной,
что определяется направлением энергии
по отношению к соответствующему элементу.
При работе электропривода часть энергии неизбежно теряется, рассеиваясь в виде теплоты. Суммарная мощность потерь Pскладывается из потерь в обмотках электрического и электромеханического преобразователей, потерь, связанных с перемагничиванием стали, потерь в емкостных элементах и, наконец, потерь из-за наличия трения в механической части.
В соответствии с (9.1) возможно большое число сочетаний потоков мощности и их направлений в системе электропривода, поэтому весьма велико и число возможных энергетических режимов электропривода.
Рассмотрим энергетические режимы при следующих условиях:

Эти энергетические режимы удобно представить в виде табл. 9.1, в которой указаны направления составляющих мощностей, соотношения между их величинами и дана краткая характеристика.
Цикл движения электропривода с энергетической точки зрения можно разбить на этапы, для которых справедливо одно из рассмотренных в табл. 9.1 соотношений баланса мощности.
Экономичность
работы электропривода в любом известном
цикле характеризуется отношением
произведенной механической работы
 к потребленной за это время электроэнергии
к потребленной за это время электроэнергии ,называемым цикловым КПД привода:
,называемым цикловым КПД привода:
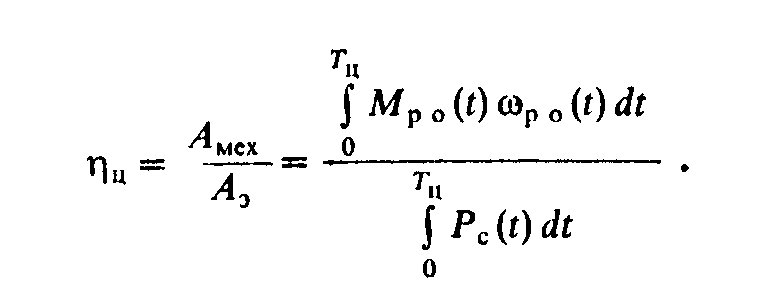 (9.2)
(9.2)
Для оценки циклового КПД следует брать отрезки времени, началу и концу которых соответствует одинаковая энергия, запасенная в элементах привода. В противном случае в определение (9.2) войдет изменение энергии элементов привода, из-за которой может быть, например, совершена часть полезной работы, что исказит значение ti„ как показателя экономичности. Например, для подъемных механизмов, полезная работа которых заключается в изменении потенциальной энергии поднимаемых или опускаемых грузов, указанное условие выполняется, если учесть, что груз перед подъемной операцией и после ее завершения в состав механической части не входит и запас энергии в системе не определяет. При определении циклов приводов подъемных механизмов, состоящих из этапов спуска грузов,цследует рассматривать как отношение энергии, возвращенной в сеть, к использованной потенциальной энергии.
Если на отдельных участках работы мощность потребляемой электроэнергии и механическая мощность были постоянны, то отношение (9.2) можно заменить отношением мощностей
![]() (9.3)
(9.3)
При переменных значениях мощностей Рси Рр,оотношение (9.3) характеризует мгновенный КПД. Поскольку на отдельных участках энергия может передаваться от рабочего органа к сети, то в этих случаяхотражает экономичность обратного преобразования энергии, но при этом=Рс /Рр,о.
Коэффициент полезного действия электропривода как системы, определяемый по (9.3), может быть представлен в виде произведения:
 (9.4)
(9.4)
где э,п,эм,п,м,ч- соответственно КПД электрического и электромеханического преобразователей и механической части привода;Рэм,п- мощность на входе электромеханического преобразователя; Рэлм,м- электромагнитная механическая мощность. При практических расчетах известны КПД двигателей и механических передач как устройств, поэтому выражение
Таблица 9.1
|
Мощность |
Баланс мощностей |
Виды режимов и их характеристика | |||
|
активная электрическая |
механиче-ская |
потерь |
изменения кинетической энергии | ||
|
+ |
+ |
+ |
0 |
|
Двигательный режим работы. Потребляемая из сети энергия передается механизму, частично (Р) теряясь в системе электропривода
|
|
+ |
0 (М=0) |
+ |
0 |
|
Режим холостого хода привода. Потребляемая энергия идет на покрытие потерь в двигателе, преобразователе и передачах
|
|
+ |
0 (=0) |
+ |
0 |
|
Режим короткого замыкания. Потребляемая энергия рассеивается в двигателе и преобразователе
|
|
+ |
- |
+ |
0 |
|
Тормозной режим противовключения. Энергия поступает из сети и от механизма и вся рассеивается в виде потерь в преобразователе, двигателе и механических передачах |
|
0 |
- |
+ |
0 |
|
Режим торможения активной нагрузки путем рассеяния энергии в системе привода. Если Р- только механические потери, то это режим торможения за счет моментов трения. Если же часть энергии рассеивается в силовой цепи двигателя, то это режим динамического торможения |
|
-
|
- |
+ |
0 |
|
Генераторный режим с возвратом (рекуперацией) энергии в сеть. Мощность, развиваемая активной нагрузкой, передается, за вычетом потерь в передачах, двигателе и преобразователе, в сеть
|
|
+ |
+ |
+ |
+ |
|
Режим увеличения скорости. Потребляемая энергия идет на совершение полезной работы, увеличение запаса кинетической энергии привода и частично теряется
|
|
+ |
+ |
+ |
- |
|
Режим снижения скорости. Высвобождающаяся кинетическая энергия вместе с энергией, потребляемой из сети, идет на полезную работу и потери
|
|
- |
+ |
+ |
+ |
|
Режим снижения скорости. Высвобождающаяся кинетическая энергия идет на вал, возвращается в сеть и частично выделяется в виде потерь
|
|
0 |
+ |
+ |
- |
|
Режим снижения скорости, торможение за счет сил статического сопротивления нагрузки и потерь энергии. Если часть энергии рассеивается в силовой цепи, то настоящий процесс идет при динамическом торможении |
|
- |
- |
+ |
+ |
|
Увеличение скорости в генераторном режиме с рекуперацией энергии в сеть. Мощность активной нагрузки частично определяет отдачу энергии в сеть, увеличение запаса кинетической энергии и потерь
|




(9.4) чаще используется в записи
![]() (9.5)
(9.5)
здесь мех- КПД передаточного механизма;Pэл— электрическая мощность на входе двигателя;Рм— механическая мощность на валу двигателя.
Каждая из составляющих общего коэффициента полезного действия — величина не постоянная, а зависящая от нагрузки каждого устройства, скорости электрических машин и других факторов. Однако исходным параметром, характеризующим каждое устройство, является номинальный КПД, соответствующий номинальной нагрузке и скорости.
Из определения КПД следует, что эта энергетическая характеристика является мерой экономичности преобразования энергии системой электропривода, мерой полезного использования потребляемой энергии, поэтому универсальной оценкой КПД является выражение в форме (9.2).
Кроме характеристики экономичности преобразования потребляемой электроприводом энергии важное значение имеет анализ экономичности потребленияэнергии от сети или автономного источника питания, т. е. характеристика электропривода как приемника электрической энергии. Экономичность передачи электроэнергии от источника электроприводу зависит как от типа и технических характеристик элементов электропривода, так и от режимов его работы. Например, энергия, затрачиваемая на возбуждение двигателей постоянного типа независимого возбуждения, идет только на потери, связанные с протеканием токов в обмотках возбуждения и созданием начального запаса электромагнитной энергии, при этом часть энергии теряется на пути от источника к электроприводу. Наиболее существенны эти потери и влияние токов намагничивания на «взаимоотношения» источника энергии и электропривода в системах, питающихся от сети переменного тока.
Напомним кратко особенности передачи и потребления электроэнергии на переменном токе. Для простоты обратимся вначале к соотношениям для однофазной цепи переменного тока.
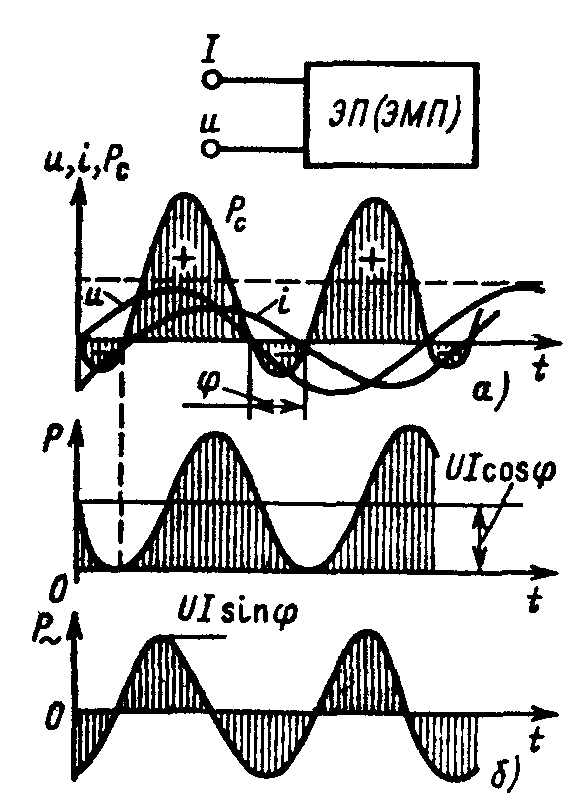
Пусть напряжение, приложенное к фазе электрического преобразователя ЭПили непосредственно к двигателю, естьu=Umaxsint, а ток, определяемый режимомЭПили электромеханического преобразователяЭМП, i = Imax sint (рис. 9.2,а).Мгновенная мощность, потребляемая фазой, равна:
![]()
где U, I -действующие значения напряжения и тока. Согласно последнему выражению мгновенная мощность может быть представлена двумя составляющими (рис. 92,6). Одна из них в любой момент положительна, имеет среднее значениеUI cos , которое определяет активную мощность Другая составляющая имеет среднее значение, равное нулю, и отражает процесс периодического обмена энергией между источником и приемником Амплитуда переменной составляющей этой мощностиUIsinопределяет реактивную мощность. Ее наличие при питании, например, фазы двигателя переменного тока обусловлено периодическим изменением электромагнитной энергии с частотой 2Ясно, что для передачи одной и той же средней за период мощностиРcр = UIcos при данном напряженииUи отсутствии реактивной составляющей мощности был бы необходим токIcosПоскольку потери мощности в активных сопротивлениях источника, линии и приемникаRопределяются полным током /, то при заданной активной мощностиPa = Рcрэти потери будут равны:
![]()
или
![]()
Рис. 9.2 Мгновенная
мощность однофазной цепи переменного
тока и ее составляющие
Еще менее экономично передается энергия, если при регулировании ее потока искажается форма синусоидального тока. Такие искажения возникают, например, при импульсном питании или применении тиристорных преобразователей.
Из теории
несинусоидальных токов известно, что
активная мощность при периодических
несинусоидальных токах и напряжениях
равна сумме активных мощностей всех
гармонических составляющих:
![]() а
полная мощность равна произведению
действующих значений напряжения и тока,
при этом отношение активной мощности
к полной характеризуется коэффициентом
мощности
а
полная мощность равна произведению
действующих значений напряжения и тока,
при этом отношение активной мощности
к полной характеризуется коэффициентом
мощности
![]()
Он не имеет смысла, аналогичного cosφ Лишь при отсутствии высших гармоник остальных случаях
![]()
где kн -коэффициент искажений, равный отношению действующего значения первой гармоники тока к действующему значению несинусоидального тока; φ1 — угол сдвига первой гармоники тока.