

§ 3. Динамики относительного движения точки.
Предположим, что система координат Oxyz может быть принята за абсолютную (неподвижную или галилееву) систему и что в этой системе координат движение точки определяется дифференциальным уравнением
где
обозначает абсолютное ускорение точки.
Чтобы составить уравнение движения по
отношению к другой системе координат
![]() ,
движущейся заданным образом по отношению
к абсолютной системе, вспомним
кинематическую зависимость между
абсолютным ускорением
и относительным ускорением
:
,
движущейся заданным образом по отношению
к абсолютной системе, вспомним
кинематическую зависимость между
абсолютным ускорением
и относительным ускорением
:
(3.11)
где
![]() — переносное ускорение, т. е. ускорение
того пункта системы
,
через который проходит в данный момент
рассматриваемая движущая точка,
— переносное ускорение, т. е. ускорение
того пункта системы
,
через который проходит в данный момент
рассматриваемая движущая точка,
![]() -
кориолисово ускорение точки, обусловленное
вращательным движением относительной
системы
по
отношению к абсолютной системе Oxyz.
-
кориолисово ускорение точки, обусловленное
вращательным движением относительной
системы
по
отношению к абсолютной системе Oxyz.
![]() ,
,![]()
Подставляя значение ускорения из (3.11) в основное уравнение, получим:
![]()
Введем
обозначения:
![]()
![]() ,
и условимся в дальнейшем опускать индекс
«
»
у элементов относительного движения;
тогда последнее равенство примет вид
,
и условимся в дальнейшем опускать индекс
«
»
у элементов относительного движения;
тогда последнее равенство примет вид
![]() 3.12)
3.12)
Вектор
![]() называется переносной силой инерции,
а
называется переносной силой инерции,
а
![]() -
поворотной или кориолисовой силой
инерции. Анализ формулы (3.12) приводит к
следующему выводу: дифференциальные
уравнения динамики относительного
движения составляются так же, как и в
абсолютной системе, только к непосредственно
приложенным силам присоединяются
еще силы инерции — переносная и
кориолисова.
-
поворотной или кориолисовой силой
инерции. Анализ формулы (3.12) приводит к
следующему выводу: дифференциальные
уравнения динамики относительного
движения составляются так же, как и в
абсолютной системе, только к непосредственно
приложенным силам присоединяются
еще силы инерции — переносная и
кориолисова.
Если относительная система движется по отношению к абсолютной системе Oxyz поступательно, прямолинейно и равномерно, то она представляет галилееву систему, т. е. уравнение движения в ней не должно ничем отличаться от уравнения движения в абсолютной системе; действительно, в этом случае = =0, так что уравнение (3.12) совпадает с основным уравнением. В случае плоского движения относительной системы
![]()
при
равномерном вращении (ε
= 0) относительной
системы вокруг неподвижной или равномерно
и поступательно движущейся по отношению
к абсолютной системе оси (![]() )
получим:
)
получим:
![]() ,
( это центробежная сила). Кориолисова
сила не будет входить в формулы
относительного движения, если относительная
система движется поступательно (
= 0) или если в силу характера связей
точка вынуждена двигаться параллельно
оси вращения (
,
( это центробежная сила). Кориолисова
сила не будет входить в формулы
относительного движения, если относительная
система движется поступательно (
= 0) или если в силу характера связей
точка вынуждена двигаться параллельно
оси вращения (![]() ).
Из уравнения
относительного движения легко получить
уравнения относительного равновесия.
Для этого достаточно в формуле (3.12)
положить
=
= 0; тогда уравнение относительного
равновесия будет:
).
Из уравнения
относительного движения легко получить
уравнения относительного равновесия.
Для этого достаточно в формуле (3.12)
положить
=
= 0; тогда уравнение относительного
равновесия будет:
![]() =0.
=0.
 Все,
что сейчас говорилось по отношению к
точке, может быть перенесено на случай
любой системы точек. Прикладывая силы
инерции, мы можем рассмотрение движения
в относительной системе координат
свести к тем же уравнениям, что и в
абсолютной.
Все,
что сейчас говорилось по отношению к
точке, может быть перенесено на случай
любой системы точек. Прикладывая силы
инерции, мы можем рассмотрение движения
в относительной системе координат
свести к тем же уравнениям, что и в
абсолютной.
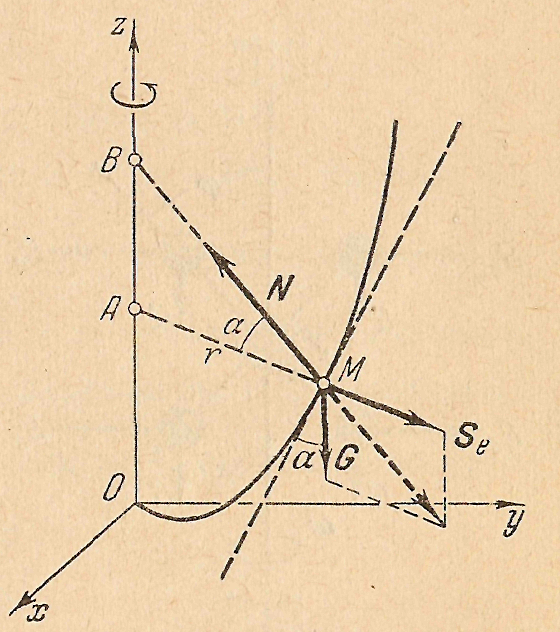
Пример 1. Найти условие относительного равновесия тяжелой точки на гладкой кривой данной формы, вращающейся равномерно вокруг вертикальной оси с угловой скоростью ω. Каков должен быть Рис 51
вид
кривой для того, чтобы в любом положении
на кривой точка была в относительном
равновесии (рис. 51) Решение
задачи сводится к применению метода
кинетостатики. Точка М находится в
относи тельном равновесии под влиянием
сил: веса Q,
центробежной силы
![]() ,
где
,
где
![]() и реакции кривой
и реакции кривой
![]() которая направлена по нормали
которая направлена по нормали
![]() к кривой. Написав условие равновесия в
проекции на касательную, получим:
к кривой. Написав условие равновесия в
проекции на касательную, получим:
Q cos а — Se sin a = 0,
или после подстановки значения Se:
![]()
Отрезок
rtg
а =
АВ
представляет
поднормаль кривой r
= f(z),
на которой находится точка
М,
и условие равновесия дается равенством
 .
Заменяя
.
Заменяя перепишем условие относительного
равновесия в виде
перепишем условие относительного
равновесия в виде
 .
(3.13)
.
(3.13)
Подставив
![]() получим значение ординаты
получим значение ординаты
![]() ,
в которой при данном
,
в которой при данном
![]() будет иметь место равновесие.
будет иметь место равновесие.
Для
решения второго вопроса проинтегрируем
уравнение (3.13). Найдем уравнение параболы:
 при
вращении этой параболы с угловой
скоростью
тяжелый шарик будет в любой ее точке
находиться в состоянии безразличного
относительного равновесия. Как
известно, свободная поверхность жидкости
в сосуде, приведённом во вращение,
принимает форму параболоида.
при
вращении этой параболы с угловой
скоростью
тяжелый шарик будет в любой ее точке
находиться в состоянии безразличного
относительного равновесия. Как
известно, свободная поверхность жидкости
в сосуде, приведённом во вращение,
принимает форму параболоида.
Пример 2. Относительное равновесие тяжелой точки вблизи поверхности Земли. Найдем условия относительного равновесия груза на нити (отвеса), принимая во внимание вращение Земли. Притяжение F (рис.51а) груза Землей искажается действием центробежной силы Se, так что вес тела, равный натяжению нити N, не будет равен F; кроме того,направление отвеса DM не совпадает с направлением радиуса МО Земли в данном пункте. Обозначим геоцентрическую широту, т. е. угол радиуса Земли с плоскостью земного экватора через λ, а географическую широту, т. е. угол отвесной линии с той же плоскостью, через φ. Уравнение относительного равновесия записываются в виде
![]() ,
,
проектируя силы на кажущуюся горизонталь НН, получим:
![]()
З аменим
здесь Se
и F
по формулам
аменим
здесь Se
и F
по формулам
![]()
![]() ,
где m
— масса груза,
R
— средний
радиус Земли,
,
где m
— масса груза,
R
— средний
радиус Земли,
![]() -
ускорение, вызываемое притяжением
Земли; это ускорение не следует смешивать
с кажущимся ускорением g,
т. е. ускорением
,
искаженным центробежной силой. После
замены получим:
-
ускорение, вызываемое притяжением
Земли; это ускорение не следует смешивать
с кажущимся ускорением g,
т. е. ускорением
,
искаженным центробежной силой. После
замены получим:

Замечая,
что угловая скорость Земли
![]() 1/сек,
радиус Земли R=6350000м
и ускорение
=9,82
1/сек,
радиус Земли R=6350000м
и ускорение
=9,82![]() ,
получим:
,
получим:
![]()
так
что разность
![]() очень мала и предыдущее уравнение можно
записать в виде
очень мала и предыдущее уравнение можно
записать в виде
 Рис
51а
Рис
51а
максимальное значение этой разности при φ= 45° будет:
![]()
что соответствует приблизительно 6'.
Проектируя силы на направление отвеса DM, найдем:
N= mg = F cos (φ -λ) — Se cosφ
или,
вследствие малости угла (φ
-λ),
![]() .
Отсюда легко найти относительную
разность между
и
g:
Максимальное значение это отношение
имеет на экваторе (φ
= 0):
.
Отсюда легко найти относительную
разность между
и
g:
Максимальное значение это отношение
имеет на экваторе (φ
= 0):

Если бы Земля вращалась примерно в 17 раз быстрее, то тела на экваторе не имели бы веса.
Переносной
силой инерции, вызванной вращением
Земли, объясняется также и сжатие Земли.
Земля имеет форму геоида,
т.е. тела, нормаль к поверхности которого
совпадает в каждой точке с линией отвеса.
Поверхность геоида можно заменить
эллипсоидом вращения, сжатие которого
по данным измерений равно
![]() .
.
Вопросы для самопроверки.
1. Напишите векторную формулу динамики относительного движения точки, что такое силы инерции.
2. Напишите векторную формулу силы сопротивления среды, прокомментируйте введенные обозначения.
3. Напишите в самом общем виде дифференциальные уравнения движения точки (в декартовой системе координат).
4. Напишите дифференциальные уравнения движения точки в осях натурального триэдра.
5
 .
Сколько (и какие) необходимо задать
начальных условий для определения
движения точки (в декартовой системе
координат)?
.
Сколько (и какие) необходимо задать
начальных условий для определения
движения точки (в декартовой системе
координат)?
6.
С какой абсолютной скоростью сойдет
колечко со стержня, если его длина равна
L , начальное положение
![]() ,
угловая скорость вращения стержня ω.
Стержень перпендикулярен оси вращения.
,
угловая скорость вращения стержня ω.
Стержень перпендикулярен оси вращения.
7. В чем разница между прямой и обратной (основной) задачами динамики?
8. Напишите уравнение относительного равновесия точки..
9. Составьте дифференциальное уравнения относительного движения колечка по стержню, вращающемуся с постоянной угловой скоростью ω, трение не учитывать.
10. Чему равно время движения точки на участке горизонтального
прямолинейного
движения, если начальная скорость
,
а конечная
![]() ?
Сила сопротивления среды равна
?
Сила сопротивления среды равна
![]() .
.
11.
Чему равен путь, пройденный точкой, на
участке горизонтального прямолинейного
движения, если начальная скорость
, а конечная
![]() ? Сила сопротивления среды равна
? Сила сопротивления среды равна
![]() .
.