

Описание конструкции балансировочной установки. Методика определения параметров уравновешивания
Лабораторная
работа по экспериментальному динамическому
уравновешиванию (динамической
балансировке) ротора производится на
балансировочной установке ТММ-Iм
конструкции Б.В. Шитикова (рис. 11).
Балансировочный ротор I установлен на
подшипниках в маятниковой раме 2, иногда
называемой также люлькой балансировочного
станка. Рама 2 шарниром 3 подвижно
соединена с неподвижным основанием 4
машины. Ось шарнира 3 расположена
горизонтально и перпендикулярно оси
ротора 1. Рама 2 поддерживается в
горизонтальном нейтральном положении
пружиной 5, поэтому ротор вместе с рамой
и пружиной образует упругую систему,
имеющую возможность с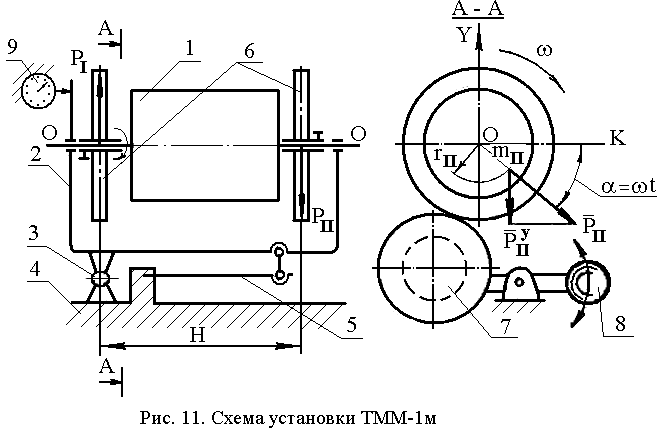 овершать
колебания относительно оси вращения
3.
овершать
колебания относительно оси вращения
3.
Рис. 11. Схема установки ТММ-1м
На валу ротора у его торцов смонтированы два хорошо отбалансированных диска 6, используемые в качестве плоскостей исправления (корректировки), т.е. плоскостей, перпендикулярных к оси вращения ротора и имеющих устройства для установки уравновешивающих масс-противовесов. Углы установки уравновешивающих масс (противовесов) отсчитываются на лимбах, насечённых на ступицах этих дисков. Разбег ротора производится через дисковую фрикционную передачу от электродвигателя 7, смонтированного на качающемся рычаге с шаровидной ручкой 8. При нажиме вниз на шаровидную ручку происходит включение цепи питания электродвигателя и прижатие фрикционного диска, установленного на его валу, к наружной поверхности разгоняемого ротора. Измерение амплитуд колебания рамы 2 с вращающимся неуравновешенным ротором I производится индикатором часового типа 9, снабженным тормозным устройством, фиксирующим шток индикатора в положении, соответствующем максимальной величине амплитуды колебаний. На установке ТММ-Iм плоскость одного из дисков 6 проходит через ось качания маятниковой рамы, поэтому при вращении неуравновешенного ротора вертикальная составляющая одной из двух скрещивающихся сил (РII, рис. 11) будет иметь плечо Н относительно оси колебаний маятниковой рамы. Очевидно, что момент силы РIIу относительно оси качаний рамы
![]() ,
(2)
,
(2)
где – угловая скорость ротора; t – текущее значение времени.
Момент М1 изменяется по синусоидальному закону с частотой , равной угловой скорости ротора, и вызывает колебания маятниковой рамы. После выключения электродвигателя под действием сопротивления воздуха, сил трения в подшипниках свободное вращение ротора будет постепенно замедляться, следовательно, будет изменяться и частота возмущающего момента М1 , и когда она станет равной собственной частоте упругой системы, наступит состояние резонанса. В этот момент амплитуда колебаний рамы достигнет наибольшего значения и будет зафиксирована (измерена) индикатором.
При резонансе максимальная амплитуда вынужденных колебаний пропорциональна величине статического момента неуравновешенной массы:
![]() ,
(3)
,
(3)
где А1 – амплитуда вынужденных колебаний неуравновешенного ротора; μ – коэффициент пропорциональности, характеризующий податливость упругой системы, зависит от параметров установки.
Если
определить постоянную μ
балансировочной установки, то по
амплитуде А1
можно установить и величину статического
момента неуравновешенных масс ротора
![]() в плоскости II. Определив величину
дисбаланса ротора, следует определить
и направление силы РII
по отношению к системе координатных
осей ХОУ,
вращающейся вместе с ротором. Тем самым
получим полную исходную информацию
для расчёта величины и координат
размещения противовеса.
в плоскости II. Определив величину
дисбаланса ротора, следует определить
и направление силы РII
по отношению к системе координатных
осей ХОУ,
вращающейся вместе с ротором. Тем самым
получим полную исходную информацию
для расчёта величины и координат
размещения противовеса.
Для определения направления силы РII в одну из прорезей диска 2, имеющую индекс «2», устанавливается дополнительный груз с известной массой mд на выбранном расстоянии rд от оси вращения ротора (рис. 12а). Измеренную амплитуду резонансных вынужденных колебаний неуравновешенного ротора с дополнительным грузом в прорези 2 обозначим А2. Затем установим груз mд на таком же расстоянии rд от оси вращения ротора в направлении, противоположном первоначальному (в противоположную прорезь диска, имеющую индекс «3», рис. 12 б). Измеренную амплитуду резонансных вынужденных колебаний неуравновешенного ротора с дополнительным грузом в прорези 3 обозначим А3.
Комплекс
измеренных амплитуд А1,
А2,
А3
позволяет определить величину и
направление вектора
![]() .
.
Из сложения векторов (рис. 12) ясно, что
![]() ,
,
![]() .
.
Так как амплитуды колебаний во всех испытаниях определены при одной и той же резонансной угловой скорости ротора, на основании теории малых колебаний можно записать
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
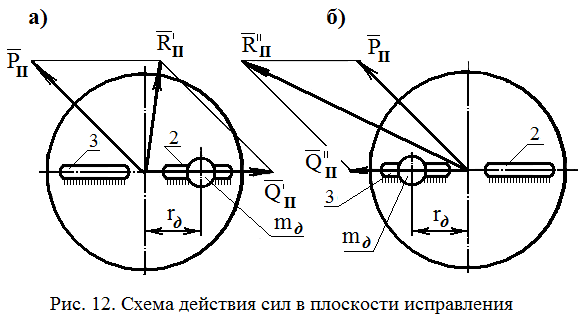
Рис. 12. Схема действия сил в плоскости исправления
Используя известные зависимости между сторонами косоугольных треугольников (рис. 13) и их совмещенную картину в определённом масштабе, соотношения амплитуд А1, А2, А3, Aд представим в виде
![]() .
.
Отсюда
 .
(4)
.
(4)
Используя выбранные значения mд и rд, определяем коэффициент пропорциональности установки
![]() .
(5)
.
(5)
Статический момент неуравновешенных масс ротора в плоскости II
![]() . (6)
. (6)
Статический момент противовеса должен быть равен статическому моменту неуравновешенных масс ротора в плоскости II.

Рис. 13. К расчету амплитуды добавочного груза
Угол между направлением установки дополнительной массы и направлением, в котором должна быть установлена масса противовеса mпр, находится по теореме косинусов (рис. 13)
 .
(7)
.
(7)
Примечание. В качестве вычитаемой величины в числителе формулы (7) подставляется та амплитуда колебаний неуравновешенного ротора с дополнительным грузом (А2 или А3), которая имеет меньшее значение.
Найденной величине cos соответствуют два значения угла установки противовеса: и -. Выбор угла определяется испытанием. Правильным является тот угол установки противовеса (один из двух), при котором амплитуда резонансных колебаний отсутствует или не превышает допустимой величины, на порядок меньшей А2. Противовес при этом устанавливается в ту прорезь на диске («2» или «3»), которая имеет одинаковый индекс с меньшей амплитудой колебаний при проверке неуравновешенности ротора с дополнительным грузом.
После того как найдены масса противовеса и его радиус-вектор установки в плоскости II, переходят к определению параметров противовеса в плоскости I. Ротор вынимают из рамы, поворачивают на 180о и вновь устанавливают на раме. При этом плоскости I и II меняются местами.