

Устройство и принцип работы датчиков кинематических параметров
Многие
механические процессы, происходящие в
машинах, являются периодическими.
Важнейшей характеристикой отдельного
процесса является скорость его протекания,
в зависимости от которой применяют
тот или иной метод измерения. Механические
методы измерений


 пригодны лишь для измерения статических
и медленно изменяющихся процессов, т.к.
измерительные устройства, применяемые
в этом случае, обладают большой
инерционностью. С помощью электрических
методов можно исследовать как
статические, так и быстро изменяющиеся
процессы.
пригодны лишь для измерения статических
и медленно изменяющихся процессов, т.к.
измерительные устройства, применяемые
в этом случае, обладают большой
инерционностью. С помощью электрических
методов можно исследовать как
статические, так и быстро изменяющиеся
процессы.
При применении электрического метода измеряемую неэлектрическую величину необходимо преобразовать в электрическую (ток, напряжение и т.д.), которая изменялась бы по такому же закону, как и неэлектрическая величина. Устройства, осуществляющие такую операцию, носят название датчиков. Изменение электрической величины отмечается затем регистрирующим прибором, обычно осциллографом электронного или магнитоэлектрического типа.
Датчик линейного перемещения (рис. 5) представляет собой неподвижную катушку 1 с двумя обмотками: W1 – первичной и W2 – вторичной. Внутри катушки 1 перемещается железный сердечник 2, жёстко связанный со звеном 3, линейное перемещение которого необходимо измерить. Первичная обмотка катушки W1 питается напряжением 6 В переменного тока с частотой 50 Гц. Из-за трансформаторного эффекта напряжение вторичной обмотки W2 зависит от того, как глубоко в катушку вдвинут железный сердечник 2. Это напряжение и определяет положение сердечника относительно катушки, а следовательно, и линейное перемещение звена 3 относительно стойки.
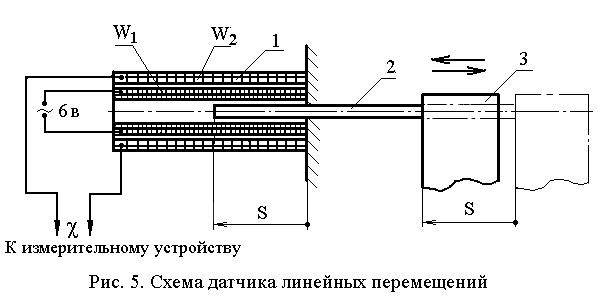
Рис. 5. Схема датчика линейных перемещений
Датчик линейных скоростей. Его схема показана на рис. 6. Постоянный магнит 1 движется относительно неподвижного проводника, свёрнутого в виде катушки 2, намотанной на сердечнике 3, изготовленном из стали с большой магнитной проницаемостью. Магнитные силовые линии движущегося магнита пересекают витки неподвижной катушки, в которой наводится э.д.с., пропорциональная скорости движения магнита относительно катушки. Если укрепить магнит на звене 4 механизма, то можно определить скорость этого звена по величине э.д.с., наведённой в катушке.
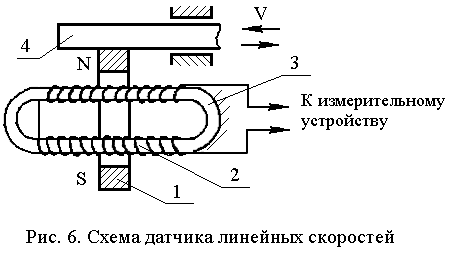
Рис. 6. Схема датчика линейных скоростей
Датчик
линейного ускорения
схематично показан на рис. 7а. Основным
его элементом является проволочный
тензодатчик (рис. 7б), представляющий
собой отрезок проволоки 1 диаметром
25–30 мкм, уложенный особым образом и
наклеенный на полоске бумаги 2. К концам
проволоки припаяны проводники 3, которые
служат для присоединения к измерительной
схеме. Тензодатчики всей площадью бумаги
наклеены с двух сторон на балку 4,
заделанную одним концом в тело движущегося
звена 7. На конце балки укреплена
инерционная масса 5 величиной m.
При перемещении звена 7 с ускорением
![]() сила инерции
сила инерции
![]() изгибает
балку и деформирует проволоку. Изменение
геометрических размеров проволоки
влечёт за собой изменение её омического
сопротивления, а следовательно,
протекающего через тензодатчик тока.
Два тензодатчика, наклеенные на обе
стороны балки 4, позволяют компенсировать
температурные погрешности при измерении.
Для повышения точности измерений оба
тензодатчика включаются в полумостовую
схему. Вторая половина моста находится
в тензометрическом усилителе, к которому
подключается датчик, прежде чем его
сигнал будет зарегистрирован осциллографом.
Для уменьшения влияния собственной
частоты колебаний балки последняя
помещена в специальную жидкость 8. Эта
демпфирующая жидкость гасит высокочастотные
собственные колебания балки.
изгибает
балку и деформирует проволоку. Изменение
геометрических размеров проволоки
влечёт за собой изменение её омического
сопротивления, а следовательно,
протекающего через тензодатчик тока.
Два тензодатчика, наклеенные на обе
стороны балки 4, позволяют компенсировать
температурные погрешности при измерении.
Для повышения точности измерений оба
тензодатчика включаются в полумостовую
схему. Вторая половина моста находится
в тензометрическом усилителе, к которому
подключается датчик, прежде чем его
сигнал будет зарегистрирован осциллографом.
Для уменьшения влияния собственной
частоты колебаний балки последняя
помещена в специальную жидкость 8. Эта
демпфирующая жидкость гасит высокочастотные
собственные колебания балки.
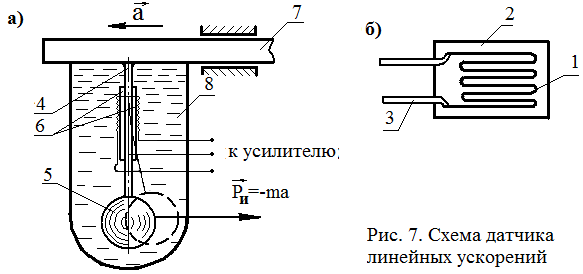
Рис. 7. Схема датчика линейных ускорений