

3. Графоаналитический метод
Вычертив в масштабе μs кинематическую схему механизма компрессора при любом положении кривошипа, определяемом углом , можно определить перемещение кулисы 3 (или поршня) относительно его крайнего положения (рис. 9):
![]() ,
,
где
![]() –
перемещение, снятое с чертежа, мм.
–
перемещение, снятое с чертежа, мм.
Для определения скорости кулисы в любом положении механизма необходимо построить план скоростей по векторному равенству:
![]() ,
,
где
![]() – скорость точки А кулисы;
– скорость точки А кулисы;
![]() - скорость точки А камня кулисы;
- скорость точки А камня кулисы;
![]() – относительная скорость;
– относительная скорость;
![]() .
.
Тогда
![]() ,
,
где
μV
– принятый масштаб плана скоростей;
![]() – отрезок, изображающий на плане
скоростей скорость точки А кулисы.
– отрезок, изображающий на плане
скоростей скорость точки А кулисы.
Чтобы определить ускорение кулисы в любом положении механизма, необходимо построить план ускорений в масштабе μа по векторному равенству
![]() ,
,
где
![]() – ускорение точки А кулисы;
– ускорение точки А кулисы;
![]() – ускорение точки А камня кулисы;
– ускорение точки А камня кулисы;
![]() – относительное ускорение;
– относительное ускорение;
![]() .
.
Ускорение кулисы вычисляется по формуле
![]() .
.
В этой
формуле
![]() – отрезок, изображающий на плане
ускорений ускорение точки А кулисы.
– отрезок, изображающий на плане
ускорений ускорение точки А кулисы.
Порядок выполнения работы
Полученные от руководителя осциллограммы перенести на кальку с помощью карандаша, шариковой ручки или фломастера и расшифровать их.
Для заданного расчётного момента времени tР определить абсциссу
 и, построив ординаты всех трёх графиков,
соответствующие этой абсциссе, найти
по ним значения перемещения, скорости
и ускорения с учётом масштабов по осям
ординат.
и, построив ординаты всех трёх графиков,
соответствующие этой абсциссе, найти
по ним значения перемещения, скорости
и ускорения с учётом масштабов по осям
ординат.Для расчётного момента времени определить перемещение, скорость и ускорение по аналитическим выражениям.
Для этого же момента времени построить кинематическую схему механизма, план скоростей и план ускорений и определить таким образом перемещение, скорость и ускорение методом планов.
Все результаты определения S, V и a свести в одну таблицу и написать выводы, отражающие причины расхождения результатов расчёта тремя различными методами.
Лабораторная работа № 3 динамическая балансировка ротора
Цель работы: углубление знаний по разделу «Динамическое уравновешивание (балансировка) вращающихся звеньев (роторов)»; получение практических навыков самостоятельного экспериментального уравновешивания ротора путём подбора параметров противовесов на балансировочных установках резонансного типа.
Основные положения. Постановка задачи
Уравновешивание сил инерции и моментов сил инерции быстровращающихся роторов является одной из важных задач современной техники. Даже полностью сбалансированный при проектировании ротор после изготовления обладает некоторой неуравновешенностью, вызванной неоднородностью материала, отклонениями фактических размеров и формы от их номинальных значений, погрешностями расположения опорных узлов. Такая неуравновешенность устраняется на специальных балансировочных установках (станках) и может быть как автоматической, так и неавтоматической.
При вращении любого тела вокруг оси в каждой i-й материальной точке этого тела (кроме точек, расположенных на оси вращения) возникает элементарная сила инерции dPui, равная по величине произведению массы dmi этой точки на её ускорение аi и направленная в сторону, противоположную направлению этого ускорения.
Если векторная сумма всей совокупности этих элементарных сил инерции dPui = dmiri2 окажетcя не равной нулю или создаёт пару сил, ротор будет неуравновешенным, его опорные подшипники будут воспринимать дополнительные динамические нагрузки, компенсирующие главный вектор сил инерции и главный момент этих сил.
При высоких рабочих скоростях современных машин с недостаточно хорошо отбалансированным ротором динамические нагрузки на опоры оказываются значительными. Они вызывают вибрации роторной машины в целом из-за перекладки зазоров и различной по разным направлениям податливости опорных узлов и корпуса, вследствие чего происходят ускоренный износ подшипников, преждевременное усталостное разрушение деталей конструкции и другие нежелательные явления, снижающие работоспособность и ресурс машины. Вибрации механизмов и машин оказывают вредное воздействие на организм человека.
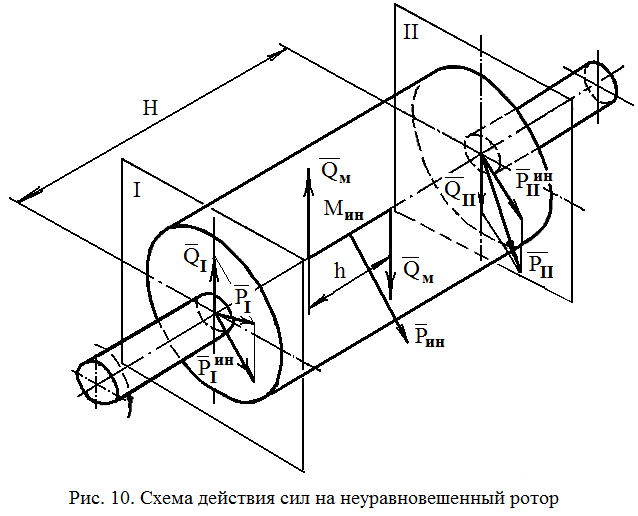
Как
известно, главный вектор и главный
момент сил инерции могут быть заменены
(представлены) двумя скрещивающимися
силами
![]() и
и
![]() ,
приложенными в любых двух заранее
выбранных плоскостях I и II, перпендикулярных
к оси вращения ротора (рис. 10). Следовательно,
полная неуравновешенность ротора может
быть интегрально
представлена
двумя точечными массами
,
приложенными в любых двух заранее
выбранных плоскостях I и II, перпендикулярных
к оси вращения ротора (рис. 10). Следовательно,
полная неуравновешенность ротора может
быть интегрально
представлена
двумя точечными массами
![]() и
и
![]() в плоскостях I и II на некоторых расстояниях
в плоскостях I и II на некоторых расстояниях
![]() и
и
![]() от оси вращения. Центробежные силы
инерции этих масс
от оси вращения. Центробежные силы
инерции этих масс
![]() ,
,
![]() .
(1)
.
(1)
Рис. 10. Схема действия сил на неуравновешенный ротор
Ясно,
что уравновесить ротор можно, установив
по одному противовесу (добавочной
корректирующей массе) в каждой из
плоскостей I и II, центробежные силы
инерции которых скомпенсируют
и
,
т.е.
![]() и
и
![]() .
.