

Обработка осциллограмм
К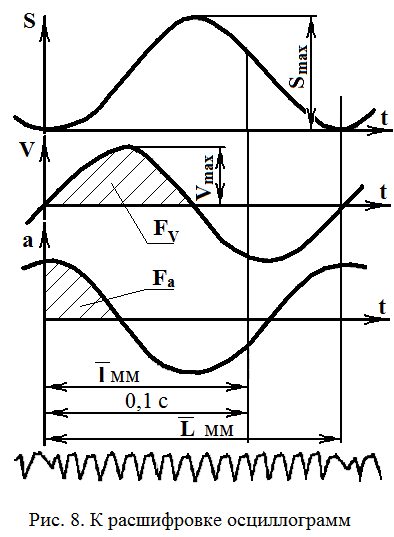 ривые
изменения перемещения, скорости и
ускорения, а также любых других
механических параметров машин в функции
времени, записанные на светочувствительную
плёнку или бумагу с помощью
магнитоэлектрического осциллографа,
называются осциллограммами. В данной
работе заранее записаны и выдаются
студенту для работы три осциллограммы:
перемещения, скорости и ускорения.
Эти осциллограммы необходимо сначала
перенести на кальку или другую прозрачную
бумагу с помощью обводки их шариковой
ручкой или карандашом, а затем
расшифровать, т.е. установить количественное
соответствие между их ординатами и
кинематическими параметрами
механизма. Для этого на осциллограммах
наносятся отметки начала и конца
кинематического цикла (одного оборота
кривошипа), проводятся координатные
оси и определяются масштабы.
ривые
изменения перемещения, скорости и
ускорения, а также любых других
механических параметров машин в функции
времени, записанные на светочувствительную
плёнку или бумагу с помощью
магнитоэлектрического осциллографа,
называются осциллограммами. В данной
работе заранее записаны и выдаются
студенту для работы три осциллограммы:
перемещения, скорости и ускорения.
Эти осциллограммы необходимо сначала
перенести на кальку или другую прозрачную
бумагу с помощью обводки их шариковой
ручкой или карандашом, а затем
расшифровать, т.е. установить количественное
соответствие между их ординатами и
кинематическими параметрами
механизма. Для этого на осциллограммах
наносятся отметки начала и конца
кинематического цикла (одного оборота
кривошипа), проводятся координатные
оси и определяются масштабы.
Р
Рис. 8. К расшифровке
осциллограмм
Оси
абсцисс всех трёх графиков проведены
с помощью осциллографа (они записаны
при отсутствии сигнала датчика). Ось
ординат, единая для всех трех графиков,
также проведена (левая вертикальная
прямая), она одновременно является одной
из отметок времени и отметкой начала
цикла. Вторая вертикальная прямая
отстоит по времени от начала цикла на
0,1 с и отнесена от неё на расстояние
![]() .
Это
позволяет сразу же определить масштаб
времени графиков
.
Это
позволяет сразу же определить масштаб
времени графиков
![]() с/мм.
с/мм.
Для
проведения вертикали, отмечающей
конец цикла, необходимо на нижней
пилообразной кривой (осциллограмме
угловой скорости кривошипа) найти
точку, повторяющую по расположению
точку начала цикла, и провести через
неё прямую конца цикла. Она должна пройти
также через точку пересечения графика
скорости с осью абсцисс. Измерив
расстояние
![]() между
отметками начала и конца цикла в
миллиметрах,
определяем
длительность цикла, т.е. время одного
оборота кривошипа:
между
отметками начала и конца цикла в
миллиметрах,
определяем
длительность цикла, т.е. время одного
оборота кривошипа:
![]() .
.
Затем определяем другие масштабы:
масштаб осциллограммы перемещений
 м/мм;
м/мм;
масштаб осциллограммы скорости
 мс-1/мм;
мс-1/мм;
масштаб осциллограммы ускорений
 мс-2/мм.
мс-2/мм.
где
Smax
–
максимальное перемещение кулисы, Smax
= 0,1 м;
![]() –
максимальная ордината осциллограммы
перемещения, мм;
–
максимальная ордината осциллограммы
перемещения, мм;
![]() –
максимальная положительная ордината
осциллограммы скорости, мм; FV
– площадь положительной части
осциллограммы скорости, мм2;
Fa
– площадь первой положительной части
осциллограммы ускорения, мм2.
–
максимальная положительная ордината
осциллограммы скорости, мм; FV
– площадь положительной части
осциллограммы скорости, мм2;
Fa
– площадь первой положительной части
осциллограммы ускорения, мм2.
Площади FV и Fa определяются с помощью миллиметровой бумаги, подкладываемой под осциллограммы, предварительно нанесённые на прозрачную бумагу (например, кальку).
2. Аналитический метод
Для определения аналитических зависимостей, описывающих перемещение, скорость и ускорение поршня компрессора, обратимся к рис. 9, на котором изображена кинематическая схема механизма компрессора, представляющего собой синусный кривошипно-кулисный механизм. За начало отсчета перемещения S кулисы 3 и поршня компрессора (рис. 9) взята точка А0, соответствующая началу рабочего хода. Из рис. 9 следует, что
![]() ,
,
где r – длина кривошипа, равная 0,05 м; – угол поворота кривошипа от начального положения.
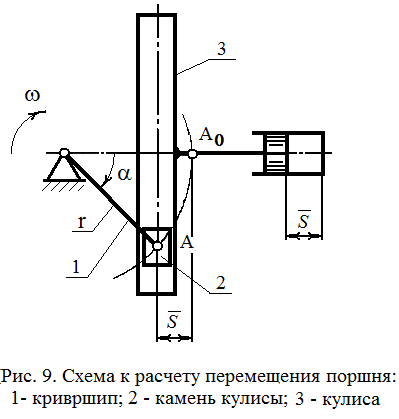
Рис. 9. Схема к
расчету перемещения поршня:
1 – кривошип; 2 –
камень кулисы; 3 – кулиса
Если принять угловую скорость кривошипа постоянной, то
![]() и
и
![]() ,
,
где = 2/Тц, 1/с; t – время, с.
Скорость V и ускорение а кулисы получим дифференцированием этого выражения по времени.
![]() ,
,
![]() .
.