

В. А. ВАРТАБЕДЯН В. О. ШЕРЕМЕТЬЄВ
ЕЛЕКТРОТЕХНІКА
Дозволено Міністерством освіти У PCP як навчальний посібник для студентів фізико- математичних факультетів педагогічних інститутів
шнопа![]()
ВИДАВНИЦТВО «РАДЯНСЬКА ШКОЛА»
КИЇВ — 1967
0П2.1
BlS
Відповідно до програми посібник вміщує відомості з загального курсу електротехніки: про електричні кола та багатофазні системи змінного струму, про електровимірювальні прилади і техніку вимірювань, трансформатори, електричні машини та випрямлячі струму.
Посібник розрахований на студентів фізико-матема- тичних факультетів педагогічних інститутів та вчителів середньої школи.
Розділи III і Xl написав В. О. Шереметьев, решту — В. А. Вартабедян.
Чернігівського
Владимир Арташесович Вартабедян, Владимир Александ- рович Шереметьев. Электротехника (на украинском языке). Издательство «Радянська школа» Комитета по печати при Совете Министров Украинской CCP
Редактори /. В. Байраченко, 6. В. Бондарчук, И. /. Литвиненко. Художній редактор В. Ф. Монжеран. Обкладинка художника Л. Б. Сергій. Технічний редактор H4 К. Волкова. Коректори Т. Ф. Фараон, Н. В. Белякова. Здано до набору 28/1 1967 р. Підписано до друку 26/VI 1967 р. Папір 60 х 90 1Ut- Папір друк. JVs it умови, арк. 20, вндавн. арк, 19,12. Тираж 11000. БФ 06071.
Видавництво «Радянська школа» Комітету по пресі при Раді Міністрів Української РСР. Київ, вул. Юрія Коцюбинського, 5. Видавн. JVe 18151« Ціна 74 коп.
Зам. № 7-86. Книжкова ф-ка ім. Фрунзе Комітету по пресі при Раді Міністрів УРСР, Харків, Донець-Захаржевська, 6/8.
ХАРКІВСЬКА КНИЖКОВА ФАБРИКА ім. ФРУНЗЕ
3—3— 8
Електротехніка — наука, яка займається проблемами використання електричних і магнітних явищ у практичній діяльності людини.
Початок розвитку електротехніки припадає на другу половину XVIII і першу половину XIX ст., коли було відкрито основні закономірності в галузі електромагнітних і електричних явищ.
Тільки 150 років тому почалися перші спроби практичного застосування електрики, а вже в наш час важко назвати якусь галузь техніки, де б не використовувалась електрична енергія. Без перебільшення можна сказати, що сучасний технічний прогрес залежить переважно від розвитку електротехніки. Більше того, навіть неможливо собі уявити життя сучасного суспільства без широкого застосування електрики.
Застосування електричної енергії значно поліпшило умови праці і підвищило її продуктивність. На використанні електричної енергії базуються всі найновіші досягнення науки і техніки в галузях: електротехніки, радіотехніки, кібернетики, виробництва атомної енергії, автоматизації і керування виробничими процесами та ін. Без електричної енергії неможливо було б здійснити споконвічну мрію людства — запуск штучних супутників Землі — і оволодіти космосом.
Головна перевага електрики перед іншими видами енергії полягає в тому, що вона універсальна і має цінні властивості: електричну енергію легко і зручно перетворювати в інші види енергії (механічну, теплову, світлову, хімічну, звукову); легко і зручно у великих кількостях при малих втратах передавати на далекі відстані; вона дає змогу здійснити комплексну механізацію й автоматизацію виробництва; її зручно розподіляти між споживачами, різними за потужністю
і характером споживання; вона забезпечує найкращі санітарно- гігієнічні умови праці на промислових підприємствах.
Геніальна ленінська формула: «Комунізм — це є Радянська влада плюс електрифікація всієї країни» — стала керівним принципом Комуністичної партії в галузі соціалістичного будівництва. Вона підкреслює поєднання передового суспільного ладу — Радянської влади і передової економіки, яка створюється набазі електрифікації. Ця формула занесена у величний документ нашого часу— Програму Комуністичної партії Радянського Союзу, прийняту XXII з’їздом КПРС.
Програма партії передбачає збільшити за найближче десятиріччя енергоозброєність країни майже в три рази, здійснити масову електрифікацію транспорту,сільського господарства,побуту міського і сільського населення, а в другому десятиріччі — в основному завершити електрифікацію всієї країни. Виробництво електричної енергії в CPCP на кінець першого десятиріччя буде доведено до 900—1000 млрд. квт-год і на кінець другого десятиріччя — до 2700—3000 млрд. квт-год·, це в півтора раза перевищить сучасний рівень виробництва електроенергії на всій земній кулі. По Українській PCP виробництво електроенергії визначено на 1970 р. у 200—205 млрд. квт-год і на 1980 p.— 550 млрд. квт-год, що в дев’ять раз перевищить рівень 1961 р.
Щоб здійснити намічене завдання з найменшими затратами матеріально-технічних ресурсів, передбачено переважне будівництво теплових електростанцій потужністю 1,2—2,4 млн. кет з агрегатами по 150—200—300 тис. кет і більше на підвищених і надкритичних параметрах пари.
За останні роки в нашій країні створено найбільші в світі енергосистеми, збудовано лінії електропередач напругою 500 кіловольтів, значно зросла енергоозброєність робітника.
Нині електрифікація відіграє провідну роль у розвитку всіх галузей народного господарства, у здійсненні всього сучасного технічного прогресу.
Розділ I
ЕЛЕКТРИЧНІ КОЛА ЗМІННОГО СТРУМУ
— 1. ВИРОБЛЕННЯ ЗМІННОГО СТРУМУ
Вироблення змінного струму розглянемо на моделі найпростішого генератора змінного струму, зображеного на рис. 1—1. Генератор складається з двох нерухомих полюсів N і S, які створюють сталий магнітний потік. Між полюсами міститься циліндричний ротор, на поверхні якого в спеціальний паз укладено в діаметральній площині дротяний виток abed, кінці якого приєднані до двох кілець ^C1 — /C2, закріплених на валі ротора. Ротор, а разом з ним і виток з кільцями, приводиться в обертальний рух з постійною кутовою швидкістю окремим двигуном (на рис. 1—1 не показано). На кільця накладено нерухомі щітки Щг—Щі, до яких приєднано зовнішнє коло з споживачем електричного струму R.
Під час обертання витка abed (наприклад, проти руху годинникової стрілки) в його активних сторонах
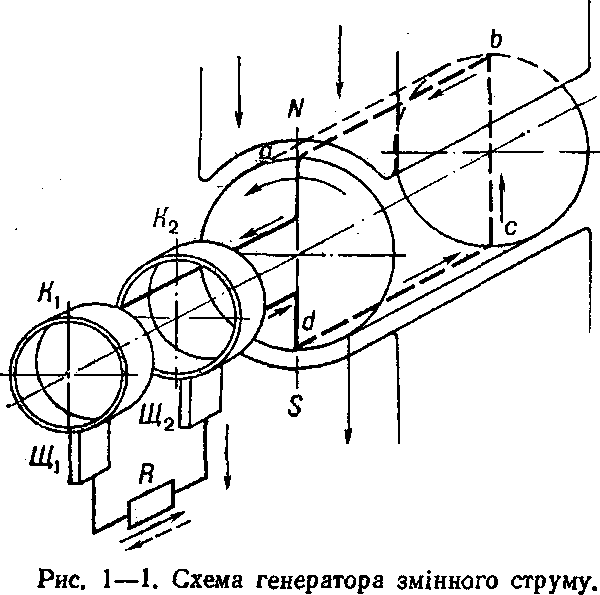
ab і cd індукуватимуться електрорушійні сили е, напрям дії яких легко визначити за правилом правої руки (на рис. 1—1 показано стрілками). За законом електромагнітної індукції величина е. р. с. у певний момент часу (миттєві значення), яка індукується у витку,
е = 2Blv sin а, (1—1)
де В — магнітна індукція однорідного магнітного поля, тл;
— лінійна швидкість активної частини витка, м/сек;
21 — довжина активної частини витка, м; а — кут між напрямком магнітних ліній і вектором лінійної швидкості.
Коли кут а дорівнює нулю (активні сторони витка не «перерізають» магнітних ліній), у витку е. р.с. не індукуватиметься. Через те що максимальна е. р. с. у витку індукується при а = 90°, тобто
е = Em = 2 Blv, (1—2)
то рівняння (1—1) можна записати:
е — Em sin а. (1—3)
Отже, при обертанні витка в однорідному магнітному полі із сталою кутовою швидкістю в ньому індукується змінна синусоїдальна е. р. с., яка графічно зображається синусоїдою.
Якщо в коло найпростішого генератора ввімкнути споживач електричної енергії з опором R, то по ньому йтиме струм, миттєве значення якого визначиться за законом Ома:
і = = T^fR sin α = Іт sin α’ (1-4)
E
де Im — -JrtD—максимальне значення струму, (1—5)
rO + Ч
гп — внутрішній опір генератора.
Рівняння (1—4) показує, що змінна е. р. с. збуджує в замкненому електричному колі змінний синусоїдальний струм. Напруга на затискачах генератора
и = IjR = ImR sin a=Um sin а (1—6)
також змінюється синусоїдально.
Якщо швидкість обертання рамки стала, то по осі абсцис можна відкладати кути повороту рамки а або час і, і основа синусоїди вимірюватиметься в кутових величинах або в одиницях
часу. Якщо рамка за час t відхилиться на кут а, то кутова швидкість ЇЇ руху со = у, (1—7)
або, у загальному вигляді
ω = ^ = 2 */, (1—8)
де / — частота струму.
У колах змінного струму ω називається кутовою частотою змінного струму. З (1—7) знайдемо α = (at, тоді можна записати:
е = EmSinωί, \
і = Іт sin (at, I (1—9)
и = UmSintat. J
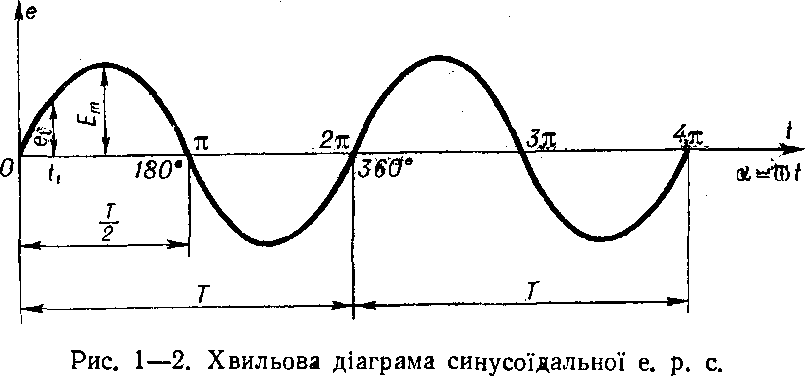
Час, протягом якого закінчується цикл періодично змінної електричної величини, називається періодом і позначається буквою T (рис. 1—2).
Число циклів змінної величини за одну секунду називається частотою/і вимірюється в або герцах (гц). Період T і частота / зв’язані рівнянням
f=Y- (1-Ю)
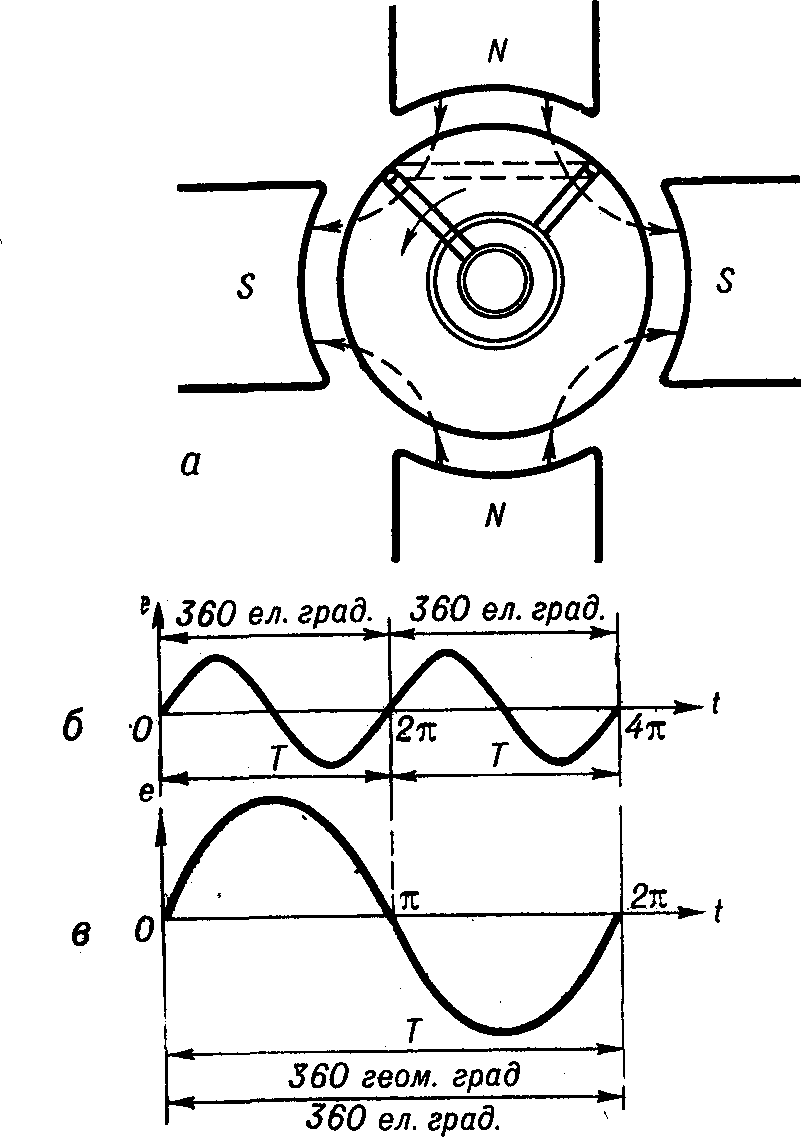
Щоб з’ясувати, від чого залежить частота, розглянемо будову і роботу чотириполюсного генератора і порівняємо його з двополюсним генератором. На рис. 1—3, а схематично зображено будову чотириполюсного генератора змінного струму. На роторі є виток, активні сторони якого розміщені на віддалі полюсного ділення (віддаль між осями двох сусідніх полюсів). Кінці витка приєднано до двох кілець. За один оберт ротора у витку цикл зміни е. р. с. повторюється двічі (рис. 1—3, б), тоді як у генераторі з двома полюсами цикл закінчується за один раз (рис. 1—3, в).
Отже, частота змінної е. р. с. і струму залежить від кількості пар полюсів р. Крім того, частота залежить ще й від числа обертів ротора за хвилину, тобто
I = eW- "-П>
Щоб усунути незручності, пов’язані з нерівністю кутів повороту ротора і синусоїдальних діаграм у багатополюсних генераторах,
Рис.
1—3.
Найпростіший
чотириполюс- НОГО
струму
працюють нор- ний
генератор: мально
лише при частоті, на
а
— схема генератора; б, в
— хвильові діаграми ЯКу
ВОНИ
розраховані. У МЄ- е. р.
с.
ЧОТИРИПОЛЮСНОГОРІВДВОПОЛЮСНОГО
гене-
талургії
для
індукційних печей застосовують
струми частотою 100
гц
і більше. Найвищу частоту електричного
змінного струму застосовують у
радіотехніці, де вона досягає мільйонів
і навіть мільярдів герців.
Амплітуда,
фаза, зсув фаз.
Якщо в рівняннях (1—9)
ωί
=
90°, то
значення е. р.
с.,
струму і напруги буде найбільшим: е
=
Em,
І
— Irm
U ~
Um-
а ел = р -а геом. (1 — 12)
Надалі всі кути подаватимемо в електричних градусах.
У техніці застосовують різні частоти змінного струму. У Радянському Союзі та інших країнах Європи як промислову частоту взято 50 гц, в США — 60 гц. Електричні машини і апарати змін-
Такі значення називають максимальними, або амплітудними значеннями електричних величин (або просто амплітудами).
Термін «ф а з а» в електротехніці має два значення: 1) як певна стадія або ступінь періодичного коливального процесу і 2) як назва частини електричного кола змінного струму (наприклад, одна з обмоток генератора змінного струму).
Рис.
1—4.
Хвильова
діаграма синусоїдальних е. р.
с. при
ψ
>
0
і
ψ
<
0.

= Em sin (Ht1.
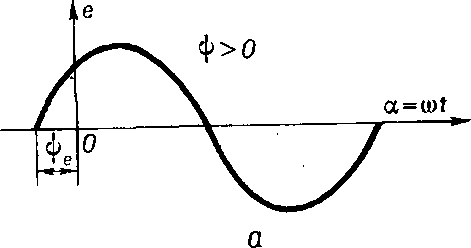
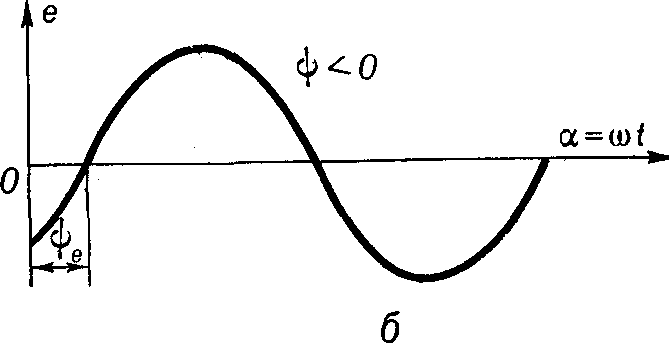
Синусоїди е. р. с. (струмів) у загальному випадку можуть не проходити через початок координат і при t — 0 мати певні значення. На рис. 1—4 зображено два випадки, коли криві е. р.с. не проходять через початок координат. На рис. 1—4, а при ί = 0 е. р. с. має додатне значення, а на рис. 1—4,6 при ^ = O — від’ємне. Щоб зобразити такі криві рівняннями, в аргумент синуса вводять так звану початкову фазу ψ (псі), яка визначає величину е. р. с. у початковий момент часу, тобто при t — 0. Для загального випадку (рис. 1—4, а) можна записати:
е = -EmSin {Ы + tye). (1 — 13)
При ^ = O е — EmSintye значення е. р. с. — додатне. Для другого випадку (рис. 1—4,6)
е = EmSin {(лі — фе). (1—14)
При t — 0 е = Em sin (—tye) = — Em sin tye значення е. р. с.— від’ємне. Для випадку, показаного на рис. 1—2, початкова фаза ψ=0.
Отже, кожна електрична величина, яка змінюється за законом синуса, характеризується амплітудою Em, Im, фазою ωί + ψ і кутовою частотою ω. Якщо дві е. р. с. однакової частоти з однаковими фазами Ш + ψι = ωί -f- ψ2 і будь-якими амплітудами Elm Ф ФЕШ, «і = ^iniSin(Ct)* + ψΟ і е2 = Eim sin (at + ψ,),
Рис.
I—5. Хвильова
діаграма двох е. р. с., які
збігаються за фазою.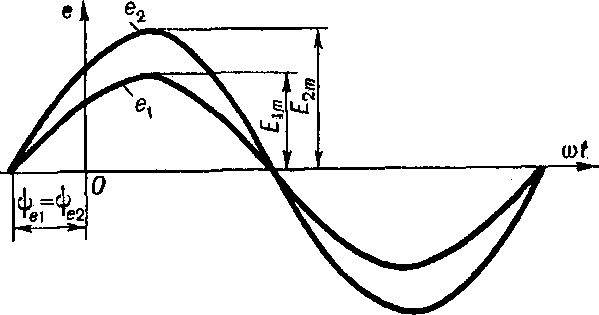
то про такі е. р. с. (або струми) кажуть, що вони збігаються за фазою (рис. 1—5). У таких е. р. с. (або струмах) амплітудні і нульові значення настають одночасно. Дві е. р.с. однакової частоти з довільними амплітудами і початковими фазами зображено на рис. 1—6. Різниця початкових фазових кутів двох синусоїдальних величин тієї самої частоти називається кутом зсуву фаз, або зсувом фаз ір:
? = ψ«ι — ψβ2· (1 — 15)
Е. р. с., амплітудне (або нульове) значення якої настає раніше від іншої, називається випереджаючою (рис. 1—6, ^1), а та, в якої ті самі значення настають пізніше,— відстаючою за фазою (рис. 1—6, е2).
Рис.
1—6. Хвильова
діаграма двох е. р. с., які
не збігаються за фазою.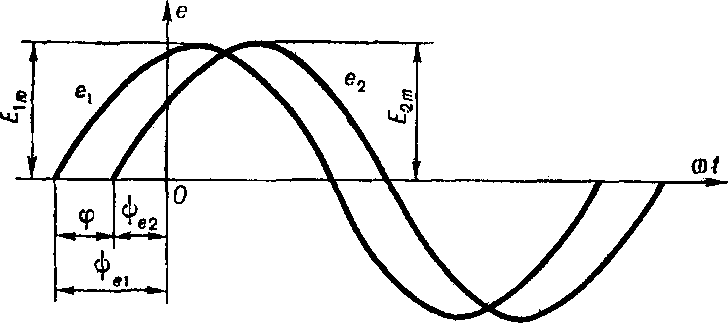
Для більшої наочності і полегшення математичних операцій при розв’язуванні задач електричні синусоїдальні величини часто зображають векторною діаграмою. Векторною діаграмою називається сукупність кількох векторів, що зображають синусоїдальні величини однієї частоти. Для побудови векторної діаграми е. р. с., яка змінюється за законом синуса, опишемо коло (рис. 1—7, б), радіус якого у вибраному масштабі дорівнює максимальному значенню е. p. с. Em. Якщо вектор Em обертати проти руху годинникової стрілки з кутовою швидкістю ω, то проекції цього вектора на вісь ординат відповідатимуть миттєвим значенням е. р. с. на хвильовій діаграмі (рис. 1—7, а). Так, у точці 0 на хвильовій діаграмі (рис. 1—7, а) е. р. с. дорівнює нулю. Цьому моменту на векторній діаграмі відповідає вектор OC = Em, проекція якого на вісь ординат дорівнює нулю, а в точці K на хвильовій
Рис.
1—7. Діаграми
синусоїдальної е. р. с.:
а
— хвильова; б
— векторна.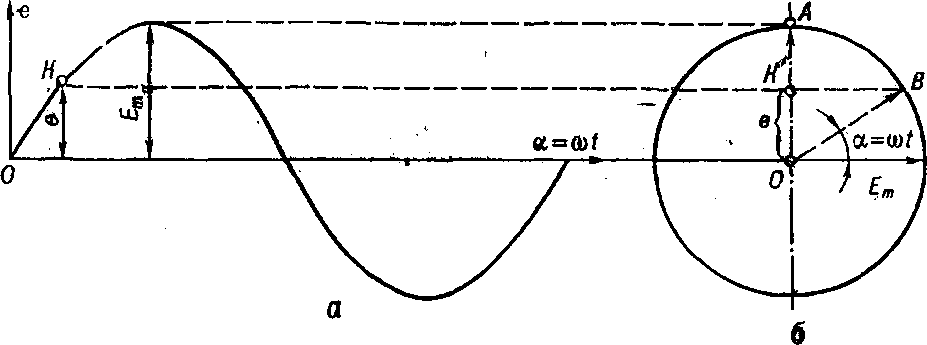
діаграмі — вектор OB = Em, який повернувся на кут а. Проекція вектора OB на вісь ординат дає відрізок OK', який дорівнює величині е. р. с. З Δ OK'В маємо:
OK' = е ~ OB cos (909—a) = OB ■ sin а.
Оскільки OB = Em, то є = JE1mSin а, а а = at; тоді е — Em sin at.
Отже, довільну електричну величину, яка змінюється за законом синуса, можна зобразити довільно орієнтованим вектором, який обертається проти руху годинникової стрілки.
Додавання синусоїдальних величин. Розраховуючи кола змінного струму, часто доводиться додавати е. р. с., струми або напруги. Припустимо, що треба додати дві е. р. с.
<?1 = Е\т sin (ω^ -f ψχ) І е2 = Еът sin (<ot + <Ы·
Ix можна додати аналітично і графічно. Але останній спосіб простіший і наочніший. На рис. 1—8 графічно зображено додавання двох е. р. с. на хвильовій і векторній діаграмах. Щоб дістати результуючу е. р. с. на хвильовій діаграмі (рис. 1—8, а), треба алгебраїчно додати ординати е. p. с. і е2. Так, наприклад, щоб знайти миттєве значення результуючої е. р. с. е = OD у початковий момент при / = 0, треба миттєве значення е. p. с. ех = OB додати до миттєвого значення е. р. с. е2 — ОС.
На рис. 1—8, б ті самі е. р. с. еуі ег подано векторами Em і Evn з початковими фазами (Ji1 і При обертанні цих векторів з однаковою електричною частотою Езаємне розміщення їх залишається
Рис.
1—8. Додавання
двох синусоїдальних е. р. с.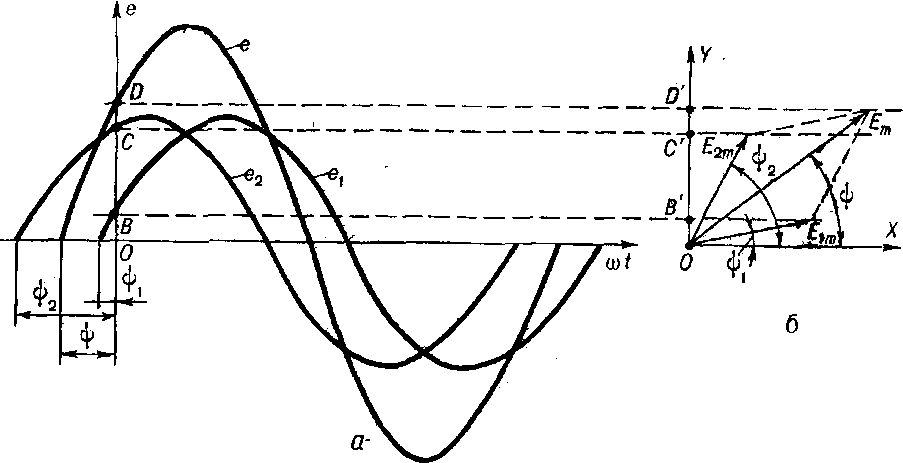
незмінним. Тому вектор результуючої е. р. с. Em можна знайти, додаючи вектори Elm і E2m за правилом паралелограма Fm = Eim+ + Егт. Через те що проекції всіх векторів на вісь OY дають миттєві значення е. р. с. е1( е2 і е. то OB' = OB, OC' = ОС, OD' — OD. Так само можна і віднімати дві синусоїдальні величини однієї частоти, наприклад: ех — е2 = ех + (— е2), тобто ег (від’ємник), узятий з оберненим знаком, додається до зменшуваного. Векторні діаграми зображають частіше не амплітудними, а діючими значеннями змінних е. р. с. і струмів, які пропорційні амплітудним значенням.
1—3. ДІЮЧІ (ЕФЕКТИВНІ) І СЕРЕДНІ ЗНАЧЕННЯ СИНУСОЇДАЛЬНИХ е. р. с. СТРУМУ І НАПРУГИ
Якщо в коло змінного струму ввімкнути споживач електричної енергії з опором R, то за безмежно малий проміжок часу at споживана енергія d.W = и і dt, де и і і — миттєві значення напруги
і струму. Через те що « = IR, то dW = і2Rdt. Споживану енергію за період знайдемо інтегруванням:
т
W = J i2R it.
Підставивши значення миттєвого струму і = Im sin (at, матимемо:
т
![]()
Відомо, що sin2 ωί = γ —^ cos 2 ωί, τ τ
тоді W = (j dt — J cos 2<at dtj .
0
Легко пересвідчитись, що другий інтеграл дорівнює нулю. II1Rt
Тому остаточно W = —ψ- .
Якщо той самий споживач з опором R увімкнути в коло постійного струму, то можна підібрати такий постійний струм І, який за той самий час T виділить на споживачі таку саму кількість енергії, що й змінний струм. Отже, W1 = I2RT. Порів-
/2 RT
нявши витрати енергії W і W1, дістанемо: I2RT = —.
 Таким
чином, діючим
(або ефективним)
значенням змінного струму називається
такий постійний за величиною струм,
який при однаковому опорі кола за той
самий час виділить таку саму кількість
енергії, щой змінний струм. Діючі
значення напруги і е. р. с. відповідно
дорівнюють:
Таким
чином, діючим
(або ефективним)
значенням змінного струму називається
такий постійний за величиною струм,
який при однаковому опорі кола за той
самий час виділить таку саму кількість
енергії, щой змінний струм. Діючі
значення напруги і е. р. с. відповідно
дорівнюють:
(1-17)
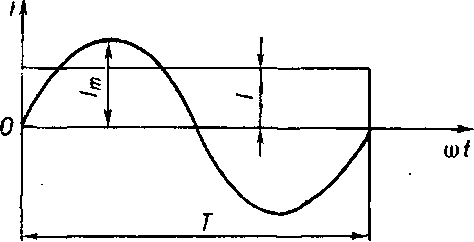
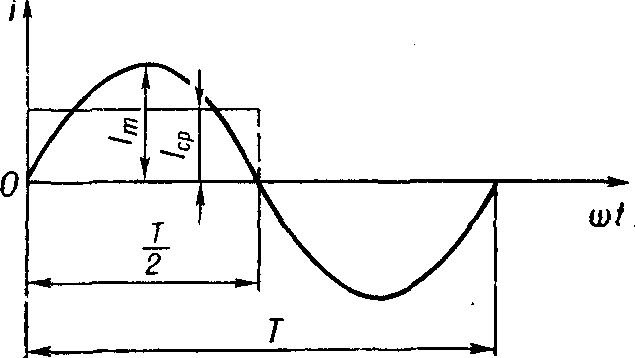
На рис. 1—9 зображено діюче значення змінного синусоїдального струму І, який має сталу величину за весь період. Зауважимо, що більшість систем електровимірювальних приладів, які застосовують для вимірювання періодичних напруг і струмів, показують діючі значення цих величин.
Крім діючих значень, в електротехніці розглядають ще й с е- р едн і значення струмів, е. р. с. і напруг. Для синусоїдальних
е. р. с., струмів і напруг середнє значення за весь період дорівнює нулю, бо площі позитивних і негативних півхвиль рівні за величиною і різні за знаком. Тому середнє значення струму Icp визначають за позитивний півперіод. Для цього площу позитивної
T
півхвилі (рис. 1—9) ділять на її основу у :
 т
т
2
J idt T
Icp = -f-J Im sin dt = T 0
jr
2 2 -IJr1mCOsiat .
Рис.
1—9.
Діюче
і середне значення змінного синусоїдального
струму.
Підставивши значення ω =
![]()
2
дістанемо Icp =z~Im=z 0,637Im-
(1-18)
Так само можна знайти середні значення е. р. с. і напруги:
Ecp = ~Ет — 0,637£m, J UcP = ^Um = 0,637Um. J
1-4. ПАРАМЕТРИ ЕЛЕКТРИЧНИХ КІЛ ЗМІННОГО СТРУМУ
Електричне коло характеризується активним опором г, індуктивністю L і ємністю С, які називаються параметрами кола. Розглядаючи теорію змінного струму, насамперед слід вивчити всі явища, які виникають в електричних колах, коли струми в цих колах змінюються з часом. При цьому слід пам’ятати, що електричний струм завжди нерозривно зв’язаний з магнітним полем. Тому, коли в колі існує змінний електричний струм, то в самому колі і в середовищі, яке оточує це коло, існують магнітне і електричне поля і електромагнітна енергія перетворюється в тепло. Нагадаємо також, що у фізичних електричних колах такі явища, як магнітне та електричне поля і виділення тепла, існують рівномірно вздовж усього кола або зосереджені на окремих його дільницях.
Найчастіше доводиться мати справу з колами, в яких магнітне та електричне поля і виділення тепла зосереджені на окремих його дільницях. Тому обмежимось розгляданням саме таких кіл. Крім того, у техніці зустрічаються кола, фізичні явища в яких визначаються лише одним з параметрів r, L або С, тоді як інші параметри виявляють себе так мало, що їх впливом можна знехтувати. Наприклад: увімкнений у коло змінного струму реостат можна розглядати як коло з опором г, а впливом його ємності та індуктивності можна знехтувати; ненавантажений трансформатор можна розглядати як індуктивність L, нехтуючи впливом активного опору і ємності кола; нарешті, конденсатор можна розглядати як зосереджену ємність, нехтуючи впливом активного опору та індуктивністю кола. Зауважимо, що в колі постійного струму при постійній напрузі незмінними будуть струм, потужність і запас енергії в магнітному та електричному полях. При змінній напрузі і струмі в колі змінюються магнітні та електричні поля, причому зміна магнітного поля збуджує в колі е. р. с. самоіндукції, а зміна електричного поля спричинює протікання зарядних і розрядних струмів.
Через те що параметри електричного кола змінного струму r, L і C із зміною величини струму майже не змінюються, то вважатимемо, що вони є величини сталі, тобто такі, що не залежать від часу, сили струму і напруги.
1—5. АКТИВНИЙ ОПІР В КОЛІ ЗМІННОГО СТРУМУ
Як відомо, опір залежить від довжини, поперечного перерізу і матеріалу провідника. Але в колі змінного струму опір провідника буде більшим, ніж у колі постійного струму внаслідок поверхневого ефекту (скін-ефект). Тому говорять, що провідник у колі постійного струму має омічний опір, а в колі змінного струму — активний опір т. До активних опорів (нехтуючи незначними ємністю та індуктивністю) відносять опір реостатів, ниток ламп розжарювання, опори електронагрівальних елементів електроплиток, електроутю- гів і т. д. На рис. 1—10, а зображено схему кола змінного струму з опором г. Під впливом прикладеної напруги U = Um sin at через опір г піде змінний струм, пропорційний прикладеній напрузі і обернено пропорційний опору кола
![]()
(1 -20)
Підставивши значення миттєвої напруги, дістанемо
(1-21)
Діюче значення струму знайдемо, поділивши максимальне значення на 1/2:
/ U
= ~. (1-23)
Отже, закон Ома при вмиканні в коло змінного струму активного опору залишається справедливим для миттєвих (1—20), амплітудних (1—22) і діючих (1—23) значень.
/
U

0-
-U
Рис. 1—10. Коло змінного струму з активним опором г:
а—схема кола; б— хвильова діаграма; в — векторна діаграма.
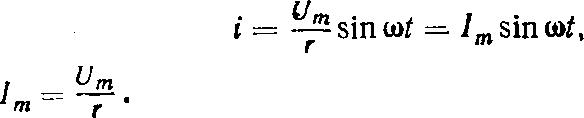
Активна потужність і енергія. Миттєве значення потужності в розглянутому колі аналітично знаходять як добуток миттєвих значень струму і напруги р = і и.
Підставивши значення струму і напруги, матимемо:
р = Im sin ωί · Um sin ωί = ImUm sin2 ω/. (I —24)
Оскільки Sin2Co/ = ~ — -i-cos2co/, Im = γ21 і Un=Y2U,
T0 p = UI (I — cos2co/). (1—25)
Аналізуючи (1—25), можна побачити, що при t = 0,t==-^- і t = T миттєва потужність дорівнюватиме нулю, а при t = TI4 і t =■■ 3IiT p = 2UI. Отже, миттєва потужність двічі за період досягає свого максимального значення і двічі мінімального, тобто пульсує з подвійною частотою і має завжди позитивне значення (рис. 1 — 11).
Середнє значення потужності за період дістанемо, якщо площу, створену миттєвою потужністю, поділимо на основу, тобто на період Т:
-26)
і,
и.
Рис.
1—11.
Миттєве
і середнє значення потужності для
активного опору.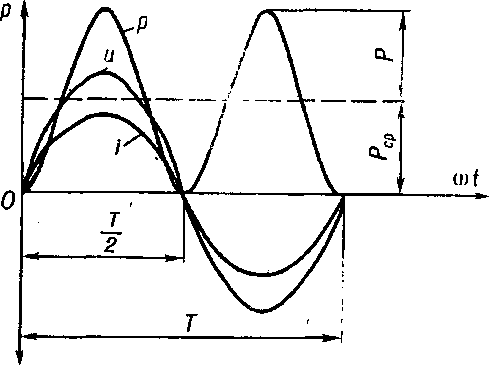


У формулі (1—25) амплітуду змінної складової потужності UI cos 2 со/, яка дорівнює середній потужності, називають а к- тивною потужністю і позначають Р.
yIVgogg
потужність в іншому вигляді:
= Iі г, (1—27)
де активна потужність пропорційна квадрату струму.
Активну енергію, яка виділяється на активному споживачі, знайдемо як добуток активної потужності на час:
(1-28)
Її вимірюють у ват-годинах або кіловат-годинах (кет год).
Як відомо, активна енергія необоротно перетворюється в інші види енергії, наприклад у механічну енергію електричних двигунів, теплову енергію електронагрівальних приладів, у променеву енергію освітлювальних ламп тощо.
1—6. ІНДУКТИВНІСТЬ У КОЛІ ЗМІННОГО СТРУМУ
Якщо в коло змінного струму ввімкнути котушку (рис. 1—12, а), то навколо її витків утвориться магнітне поле. Як відомо з курсу фізики, у цьому випадку магнітний потік Ф прямо пропорційний струму /, числу витків w і обернено пропорційний магнітному опору гм, тобто
Добуток
струму на число витків називають
намагнічуючою силою
F
= і
■ w. (1—30)
Магнітний
опір гм
пропорційний середній довжині магнітної
силової лінії І,
яка замикає північний і південний
полюси котушки, і обернено пропорційний
поперечному перерізу котушки S
та
м а г- нітній
проникності
μ,
що
характеризує магнітні властивості
середовища, в якому існує магнітне
поле:
г.
= £. <1-31)
Рис.
1—12.
Коло
змінного струму з індуктивністю L:
а
—
схема кола; б — хвильова діаграма; в—
векторна діаграма.
Підставивши
(1—31)
в
(1—29),
дістанемо:
Ф
=
Цї
або Ф =
ϋγΕ
.
і (еб). μ-S
Коли
по колу проходить змінний струм, то він
утворює змінний магнітний потік, який
перерізає витки тієї самої котушки,
внаслідок чого у витках збуджується
е. р. с. самоіндукції, пропорційна
швидкості зміни потоку:
(1-33)
гіФ
eL=-wW
Знак
мінус (правило Ленца) показує, що струм
самоіндукції в контурі протидіє зміні
магнітного потоку Ф, що пронизує контур.
Підставивши
значення Ф =
·
і
в (1—33),
дістанемо
Swi
4
di
άΦ
wHT
=
,
Swt
L
=
μ
—
(1-32)
(1-34)
Zl
■■
І
де












і характеризує властивості та конструктивні параметри котушки і називається коефіцієнтом самоіндукції, або ін- дуктивністю.
Одиницею індуктивності є генрі (гн) — індуктивність, при якій зміна сили струму на 1 а за 1 сек збуджує е. р.с. самоіндукції в 1 в. Як видно з (1—34), величина е. р.с. самоіндукції пропор-
. - . di цінна швидкості зміни струму .
Якщо струм змінюється за синусоїдальним законом і = = /msin со/, то е. р. с. самоіндукції eL = — = — coL/m cos ω/=
= <oL/m sin (соt — у) ·
Позначивши шЫт = ELm, матимемо:
![]()
(1-36)
З цього рівняння видно, що е. р. с. самоіндукції відстає за фазою від струму на кут γ (рис. 1—12, б і в). Швидкість зміни
струму ~ досягає найбільшого значення в момент переходу струму
через нуль, тому в ці моменти часу е. р. с. самоіндукції набирає своїх максимальних значень. Коли струм досягає свого максимального значення, його швидкість зміни дорівнює нулю, а тому й е. р. с. самоіндукції теж дорівнює нулю. Для кола з індуктивністю за другим законом Кірхгофа можна записати: и + еь = 0 або и = = — eL.
Отже, у колі з індуктивністю прикладена напруга зрівноважує е. р. с. самоіндукції і протилежно їй напрямлена.
Для розглядуваного кола (рис. 1—12)
т
di т
d (Im
Sin
ω/ч
т
.
. / , л\
u
= ul
= —eL
= L4f
=-- L
-і—^ )
= a>L/m
sm [ωί
+
γ)
=
![]()
деі/іи = со L-Im- амплітуда напруги.
Поділивши амплітудні значення на У2, матимемо діючі значення Ul = OdL І, або
![]()
Зауважимо, що е. р. с. самоіндукції називають реактивною е. р. с., а напругу, яка зрівноважує цю е. р. с.,—реактивною напругою Ul-
Таким чином, для амплітудного і діючого значень струму (тільки не для миттєвого!), який проходить через котушку, справджується співвідношення, аналогічне за формою до закону Ома. У знаменнику останнього виразу величина ωΖ. називається індуктивним опором котушки, який позначають через Xl і вимірюють в омах. Отже,
Xl — (oL = 2π/ · L. (1—38)
Потужність і енергія в колі з індуктивністю. Миттєве значення потужності на індуктивності дорівнює добутку струму на напругу:
Ql- і ■ Ul = Im sin ωί ■ ULm sin {(at + γ) = In^Lm sin · cos ωί> але
дуктивністю.
ТОДІ Qi = γΐmULm Sin 2(Ot.
Переходячи до діючих значень, матимемо
Qi = Z iZtSin 2ω*. (1-39)
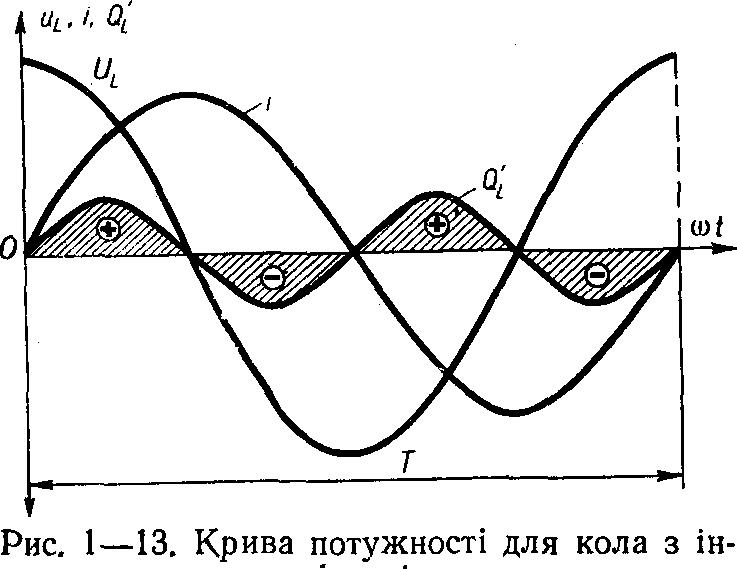
Електрична потужність у цьому випадку також пульсує з подвійною частотою, як і при активному опорі. Але на відміну від кола з активним опором при індуктивності потужність не має сталої складової, тому за період середнє значення потужності дорівнює нулю. У цьому легко пересвідчитись, якщо площу, описану кривою потужності Ql, поділити на період:
T
J Q ^dt * ц j
=
0.
Таку криву миттєвої потужності Ql в колі з індуктивністю зображено на рис. 1—13. Позитивні площі відповідають моменту, коли котушка споживає енергію, яка зосереджується в ній у вигляді магнітного поля. Негативні площі відповідають поверненню енергії в сітку. Таким чином, хоч у колі з індуктивністю струм і проходить, проте коло енергії не споживає. Енергія дорівнює
нулю як за період, так і за півперіод. Вона ніби перекачується з сітки в котушку, і навпаки, двічі за період. При цьому корисна робота не виконується. Якщо кількість таких споживачів збільшувати, то втрати енергії в сітці від протікання цих струмів збільшуватимуться, що зменшуватиме к. к. д. енергоустановки.
З рівняння (1—39) при sin 2cot = 1 р е а к т и в н у потужність Ql можна визначити через струм:
Ql = Wl = ІШ = ω LI2 = XlI2. (1—40)
Одинйцею вимірювання реактивної потужності є вольтам- пер реактивний — вар або кіловольтампер реактивний — тар.
Величину енергії, яка зосереджується в котушці, можна знайти за чверть періоду:
Tl. Tl,
Wl=-- j Qldi=J т 2 ш- sin 2Ш dt =
Tl.
ImULrt
2ω
4ω
Підставивши
значення ULm
= wLIm,
дістанемо
![]()
1—7. ЄМНІСТЬ У КОЛІ ЗМІННОГО СТРУМУ
Відомо, що в колі постійного струму з конденсатором струм проходить лише під час заряджання і розряджання конденсатора і триває частки секунди. Коли конденсатор зарядиться повністю, струм у колі припиняється. Якщо конденсатор ввімкнути в коло змінного струму (рис. 1—14), то в колі весь час проходитиме струм. За безмежно короткий проміжок часу dt напруга на обкладках конденсатора зміниться на du, а заряд — на dq, тому
dq = Cduc. (1—42)
Але кількість електрики, що проходить по провіднику за. одиницю часу, дає струм і = звідки dq = idt.
Підставивши значення dq у (1—42), матимемо idt = Cduc, звідки
«с-4-jw/. (1-43)
Якщо струм I = ZmSinatf, тоді напруга
Im
cos
(лі
Im
ski
ті
dt
(йС
uC=-Iri



(1-44)
O
Ac
K
KU
'Ue
Рис.
1—14.
Коло
змінного струму з ємністю С:
а
— схема кола; б — хвильова діаграма;
в
—
векторна діаграма.



fi(
і
і
-U
Sf-
(1-45)
UCm. ω£ Im Х-СІті
або через діючі значення
(1-46)
Uc = XcIm; І = х~
де Xe ^ — P Є a K T И В H о-е M H і с н и й опір, який вимірюється
в омах. Оскільки Xc — ^ ■
пропорційний частоті струму джерела енергії, то для струмів високих частот (радіочастот) він має мале значення, а для постійного струму — нескінченність.
За другим законом Кірхгофа для такого кача (рис. 1—14, а) можна записати: и + ес = 0 або и = — ес-
Е. р. с. ємності дорівнює ес = — -£■ · Знак «мінус» показує, що е. р. с.
2
nfC
ємності напрямлена назустріч напрузі, внаслідок чого на обкладках конденсатора зібрався заряд q. Коли в колі інших опорів, крім ємнісного, немає, то Uc = — ее-
Отже, е. р. с. і напруга на ємності перебувають у протилежних фазах, ес і Uc «азивають відповідно реактивною е. р. с. і реактивною напругою.
 Потужність
і енергія в колі з ємністю.
Потужність у колі з ємністю можна
знайти, перемноживши миттєві значення
струму і реактивної напруги:
Потужність
і енергія в колі з ємністю.
Потужність у колі з ємністю можна
знайти, перемноживши миттєві значення
струму і реактивної напруги:
Qc = іUc — Im sin ωί X
Xt/cmSin ІШІ — ~ 'j =
ч
= γ ImUcm sin 2(0/,
5о через діючі значення Qc = IUc sin 2ωί. (1—47)
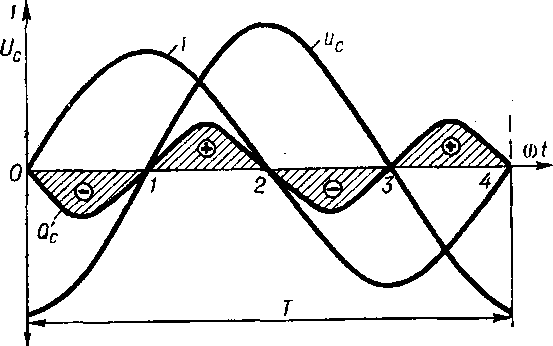
З цього рівняння видно, що потужність на конден- Рис. 1—15. Крива потужності для кола з єм- саторі коливається з под- ністю.
війною частотою. Середнє
значення потужності за період дорівнює нулю, як і в колі з індуктивністю (рис. 1—15):
τ τ
Qe ср = ψ- j*Qcdt = 41]1 sin-dt = 0.
Тому й витрата енергії за період також дорівнює нулю. При цьому відбувається лише обмін енергією між джерелом і конденсатором. Реактивно-ємнісну потужність Qe при sin 2 ω/ = 1 можна визначити через струм:
(1-48)
Аналізуючи криву потужності (рис. 1—15), можна помітити, що протягом першої чверті періоду — від точки O до точки 1 — потужність від’ємна, а це означає, що конденсатор розряджається. Протягом другої чверті періоду — від точки 1 до точки 2 — прикладена до конденсатора напруга збільшується від нуля до амплітудного значення. За цей час конденсатор заряджається. Струм,
який дорівнює швидкості зміни заряду і = —■ на обкладках, у
точці 1 досягає найбільшого значення, оскільки в цей момент на
обкладках найбільша зміна напруги, а значить, і найбільша швидкість зміни заряду. У точці 2 струм дорівнює нулю, бо перестає збільшуватись напруга, а отже, заряд на обкладках конденсатора.
Протягом третьої чверті періоду — від точки 2 цр точки 3 — конденсатор розряджається, а від точки З до 4 — заряджається в зворотному напрямі.
Порівнюючи криві потужності для кола з індуктивністю {рис. 1 — 13) і ємністю (рис. 1 — 15), легко помітити, що за час, коли котушка індуктивності віддає енергію в сітку, конденсатор споживає ЇЇ. Це явище використовують для збільшення коефіцієнта потужності сітки, про що докладніше мова буде далі.
Величину енергії, яка зосереджується в конденсаторі у вигляді електричного поля, можна знайти лише за чверть періоду:

0
0
Підставивши
значення Im
= -у,
дістанемо
(I)C![]()

![]()

Wc = ^~^. (1-49)
1-8. КОЛО ЗМІННОГО СТРУМУ З АКТИВНИМ ОПОРОМ І ІНДУКТИВНІСТЮ
У практиці дуже часто зустрічаються кола змінного струму з послідовним сполученням активного опору і індуктивності (рис. І—16, а). Саме такі параметри має реальна котушка індуктивності, бо в колі змінного струму вона має і активний і індуктивний опори. Якщо струм у колі і = Im sin (at, то за другим законом Кірхгофа (алгебраїчна сума е. р. с. у колі дорівнює сумі спадів напруг) можна записати: и + eL = іг, звідки и — іг — eL.
Оскільки Cl = —L ~ , то и = ir -f L- Ua -j- uL, де и —
напруга на затискачах кола; иа — активна напруга; Ul — реактивна напруга.
(ω* + -Jj,
Ul = L ~ = (oLIm sin + - = ULm sin то и = иа + uL = Uam sin (at + ULm sin ((at + ~ j. (1—50)
З векторної діаграми (рис. 1 — 16, є) для діючих значень напруг маємо: Ua = U cos φ; Ul = U sin φ, або (через максимальні значення)
Uam = Um COS φ; Uun = Um sin <р.
Підставивши ці значення в 1—50, дістанемо:
U = Um cosf ■ sinwf + UmSinf ■ cos ωί = UmSin (ωί + φ). (I—51)
Отже, прикладена напруга випереджає струм на кут φ. Величина кута зсуву фаз φ між струмом і напругою залежить від співвідношення активного і реактивного опорів кола.
Рис.
1—16.
Коло
змінного струму з активним г
і реактивним Xl
опорами:
Ul
0
-U
η


а _ схема кола; б — хвильова діаграма напруг і потужностей; в — векторна діаграма діючих значень напруг.
З векторної діаграми (рис. 1 —16, в) можна знайти важливі співвідношення: U = YU2a _|_ и\— I V r2 + XL’ ЗВ'АКИ
U
(1-52)
2
Рівняння (1—52) — це закон Ома для кола змінного струму з активним і реактивним опорами. Величина Yr2+ X2l називається повним опором кола і позначається буквою Z.
З
неї також можна знайти кут зсуву фаз:![]()

Співвідношення (1—53) і (1—54) ми знайшли з так званого трикутника напруг. Оскільки напруги відповідають значенням
(1-55)
(1-56)
COS
Ψ
=
,
Г![]()
r = Z· cos φ, Xl = Z · sin φ.
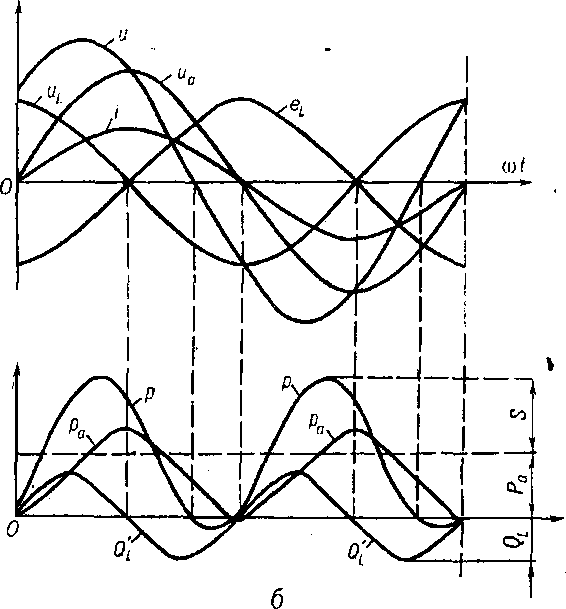
Потужність і енергія в колі з г і Xl- Миттєву потужність можна обчислити, перемноживши миттєві значення струму і напруги. Графічно миттєва потужність зображена на рис. 1 — 16,6:
р = і . и = Im sin ωί ■ Um sin (ωί + φ) = ImUm ~ cos (—φ) —
-J cos (2ωί + φ) ·
Але Im = V2 /, Um = V2 U, cos (—φ) = cos φ,
тоді
ρ = UI cosf — UI ■ cos (2ωί -f ψ). (I—57)
Оскільки cos (2ωί + ?) = cos 2ωί ■ cos φ — sin2co/ · sin φ, то
P=UI (cos ψ — cos φ · cos 2ωί + sin φ · sin 2ωί) =
= UI cos φ — UI cos φ · cos 2ωί + UI sin φ · sin 2ωί (1—58)
Легко
пересвідчитись, що другий і третій
інтеграли дорівнюють нулю, тоді
т
о
U-
cos φ
=
Ua,
то
P=-
Ua
-
/·
(1-59)
Оскільки
(1-60)


![]()
Отже, перша складова миттєвої потужності (1—58) є сталою складовою, яка дорівнює середній потужності за період, або а к- тивній потужності (рис. 1—16, б). Активна потужність (1—60) дорівнює добутку діючих значень струму і активної складової напруги. У загальному випадку активна потужність (1—59) пропорційна діючим значенням прикладеної напруги і струму, а також cos φ. Cos φ називається коефіцієнтом потужності, фізичний зміст якого розглянемо далі.
Рис.
1—17. Трикутник
опорів.
Рис. 1—18. Трикутник потужностей у колі з г і Xl.
Друга складова (1—58) рг = — UI cos φ · cos 2ω* = — P cos 2ωί є пульсуючою частиною потужності в активному опорі з амплітудою Р.
Третя складова р3 — UI sin φ ■ sin 2ωί є пульсуючою частиною потужності в індуктивності з амплітудою UI sin φ. Амплітуда i/7 sin φ є реактивна потужність індуктивно-
сті:
(1-61)
Підставивши U ■ sin φ = UL, матимемо Ql = Ul і — відому формулу (1—40).
Як видно з (1—61), реактивна потужність пропорційна sin φ. Вона існує тільки при φ ф 0. При φ = 0 напруга і струм збігаються за фазою; це означає, що в колі є лише активні споживачі.
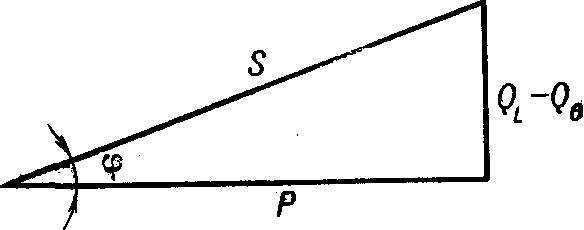
Вирази для активної (1—59) і реактивної (1—61) потужностей можна дістати і з трикутника потужностей (рис. 1—18). Трикутник потужностей утворюється з трикутника напруг, якщо всі його сторони помножити на величину струму: P = UaI,
Ql = Ul- і, S = UI.
З трикутника потужностей маємо:
P = S COS φ = UI COS φ, Ql = S sin φ = UI sin φ,
Величина S = UI називається повного, або позірною, потужністю і вимірюється у вольтамперах (ва) або кіловольтамперах (ква). Позірна потужність дорівнює амплітуді пульсуючої потужності всього кола (рис. 1—16, б). Це видно і з виразу (1—57):
P = UI cos φ — UI cos (2Ш + φ) = P — S cos (2ω* + φ).
3 (I—62) маємо:
cos ¥ ~ ~ · (1-63)
Отже, cos φ показує, яку частину становить активна потужність від повної. Нормально для всіх електростанцій cos φ повинен бути близьким до 0,95. Якщо cos φ на деяких підприємствах низький, то його підвищують (див. § 1—12).
Активну енергію Wa при незмінній активній потужності кола( знаходять, помножаючи активну потужність на час:
Wa = P ■ і = UI cos φ -t. (1—64)
Реактивну енергію Wp при незмінній реактивній потужності кола знаходять, помножаючи реактивну потужність на час:
W0 = Q ■ t = UI sinf ■ t. (1—65)
Активну і реактивну енергії вимірюють лічильниками активної і реактивної енергій.
Вимірявши активну і реактивну енергії, можна визначити cos φ електричної установки:
PP
COS Cp = -FT = -T- = · (1—66)
S /P2 + Q2 ywl +w*
а 1 D
1—9. КОЛО ЗМІННОГО СТРУМУ З АКТИВНИМ ОПОРОМ І ЄМНІСТЮ
Як відомо з § 1—8, у колі з ємністю напруга відстає від струму на куту. Саме цим коло з активним опором і ємністю відрізняється від попереднього випадку. Схему такого кола, хвильову і векторну діаграми напруг подано на рис. 1—19. Якщо порівняємо векторні діаграми на рис. 1—19 і рис. 1—16, то помітимо, що в першому випадку загальна напруга відстає від струму, а в другому — випереджає його.
Загальна напруга для розглядуваного кола:
и = иа + Uc = Uam sin Ш + UCmsin ίω* — — j = Um sin(otf —φ). (1—67)
З трикутника напруг (рис. 1—19, в) можна знайти співвідношення, подібні до (1—56), а з трикутника потужностей — подібні до (1—62). Оскільки всі міркування і аналітичні викладки для кола з активним опором і ємністю дуже подібні до кола з активним опором та індуктивністю, удруге їх не повторюватимемо, а перейдемо до розгляду загального випадку кола змінного струму з послідовним сполученням активного, індуктивного і ємнісного опорів.
Ua
Uc
I
"I—
II.
г
с

РЕЗОНАНС НАПРУГ
Якщо в коло змінного струму і = Im sin ωί послідовно ввімкнути опори г,
Xl і Xe, то на цих опорах матимемо відповідні спади напруг U а, Ul і Uc (рис.

ес. Але оскіль- - eL, Uc = —Єє',
20). Для такого кола за другим законом Kipx- гофа можна написати: и + Sc = іг. звідки и =
= ir -eL-
КИ Ul= -
иа ~ то Рис. 1—19. Коло змінного струму з г і С:
ц — ц -X-U -\~ Ur П 68) а —схема кола; б — хвильова діаграма напруг;
alLic*' ' в— векторна діаграма діючих значень напруг.
тобто миттєве значення прикладеної до кола напруги в будь-який момент часу дорівнює алгебраїчній сумі спадів напруг на дільницях кола.
Через те що струм у колі змінюється за гармонічним законом (для стаціонарного процесу), то й напруги на дільницях кола змінюються також за гармонічним законом. Тому на підставі (1—68) можна записати рівняння напруг:
Uam
sin ωί
+
ULm
sin
Um sin (ωί + f). ' (1—69)
Як видно з (1—69), напруга на активному опорі збігається за фазою з струмом, на індуктивному опорі випереджає струм на кут 90°, а на ємнісному — відстає від струму на кут 90°. Загальна напруга випереджає струм на кут φ при умові, що Xl > Xe- У (1—69) амплітуда результуючої напруги дорівнює векторній сумі максимальних напруг на дільницях кола:
Um = Uam + U Lm + Ucm,
або через діючі значення:
(1-70)
Рис.
1—20. Коло змінного струму
з послідовним сполученням r,
Xl
і Xc:
а
— схема кола; б — векторна діаграма
при Xl
>
Xq.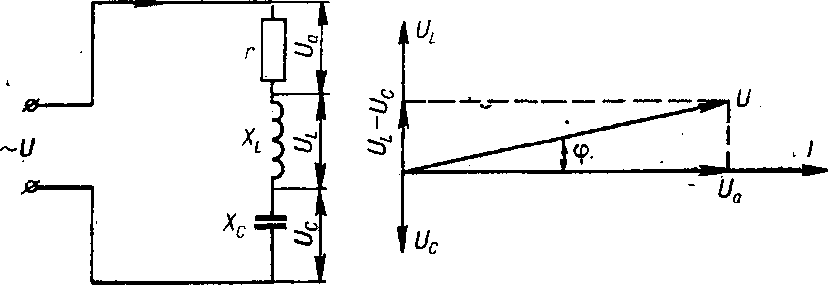
Рівняння (1—70) дає змогу побудувати векторну діаграму при XL>Xc (рис. 1—20). Щоб дістати вектор результуючої
напруги U, спочатку знаходимо результуючу реактивну напругу Ul-U с, яку геометрично додаємо до вектора активної напруги Ua, З векторної діаграми маємо:
звідки
(1-71)
дeZ
= Vr2+
(Xl-
Xcf
= У
Г2
+
(ω£
—
^
—
повний опір кола.
Рівняння
(1—71)
зображає
закон Ома для кола змінного струму з
послідовним сполученням опорів ra,
Xl
і
Xe-
![]()


На векторній діаграмі (рис. 1—20,6) ми маємо трикутник напруг, з якого можна скласти співвідношення
Ua
U
"
IX,
г
~Z'
COS
φ
Ur
U1
Xl-Xc
(1-72)
Sin
φ
=
U
tg«p
=
и
/
· Z
/х
L
-
/г
I/
-IXr









Рис.
1—21.
Трикутник
потужностей для кола з r,
Xl
і
Xc.
< Xe, то кут φ < 0 і результуюча
напруга відставатиме від струму. При Xl = Xe кут φ = 0, тому результуюча напруга за фазою збігатиметься з струмом. У загаль-
2
1
2
<
<*<tJ
З трикутника напруг можна мати трикутник потужностей, помноживши всі його сторони на величину струму (рис. 1—21).
З трикутника потужностей маємо:
(1-73)
JU
г
'
Z = Vr* + (Xl-Xe)2-= г, а / = ~ = ~
При
відхиленнях від резонансних умов струм
у колі зменшується, тому що до активного
опору додається опір реактивний.
Резонанс напруг можна дістати, змінивши
одну з таких трьох величин: індуктивність
L,
ємність
C
або
частоту f.
Частоту,
при якій настає резонанс при певних L
і
С,
знаходять з умови Xl
= Xe-
Xl
~
ω£,
=
2π/L;
Ylc’
,и
2τιΥlc'
Частота
/0
називається резонансною,
або власного частотою електричного
кола.
Резонанс напруги настає, коли власна
частота кола /0
дорівнюватиме частоті сітки (вимушені
коливання). При резонансній частоті в
колі буде найбільший струм (рис.
1—22).
Потужність
при резонансі напруг.
З рівняння загальної потуж- Qcf
маємо:
S
= Yц.
ry
_|_
(PXl
-
ності
S
= VP2ajT
(Ql
■
I
_
2TifC'
або
f0
(1-74)
1
1
CD0L
=
ω„
IiXcf







PVr2+
(Xl-Xcf-
Оскільки
при резонансі
Отже, загальна потужність кола при резонансі напруг дорівнює активній потужності. Кут φ між струмом і прикладеною напругою дорівнює нулю, а коефіцієнт потужності cos φ = 1.
Незважаючи на те, що реактивна потужність усього кола дорівнює нулю Ql — Qc- 0, потужності котушки і конденсатора існують, бо Xl Ф O і Xe Ф 0; Ql = Qc = I2Xl = P Xe При цьому котушка і конденсатор обмінюються енергією. Тим часом між котушкою і сіткою, а також між конденсатором і сіткою обміну енергією немає. З сітки надходить лише енергія, яка потрібна для покриття втрат в активному опорі.
На рис. 1—23, а зображено хвильову діаграму напруг і потужностей, а на рис. 1—23, б векторну діаграму напруг при резонансі. Зауважимо, що при резонансі напруг на реактивних опорах можуть виникати небезпечні для ізоляції апаратури напруги, які перевищуватимуть напругу сітки.
Рис.
1—22.
Крива
залежності струму в колі з послідовним
сполученням r,
XL,
Xc
від
частоти.
Дійсно, Ul = Uc = XlI■> але / = —,
годі
а
Отже, напруга на котушці і конденсаторі буде більша від напруги сітки в стільки разів, у скільки разів їх реактивний опір буде більший від активного опору кола. Явище резонансу напруг використовують у стабілізаторах напруги, у радіотехніці та ін.
1—11. ПАРАЛЕЛЬНЕ СПОЛУЧЕННЯ АКТИВНОГО ОПОРУ, ІНДУКТИВНОСТІ І ЄМНОСТІ В КОЛІ ЗМІННОГО СТРУМУ. РЕЗОНАНС СТРУМІВ
Велике практичне значення має коло змінного струму з паралельним сполученням активного опору, індуктивності і ємності (рис. 1—24).
Вважатимемо умовно, що на окремих ділянках кола зосереджено тільки активний опір г, індуктивний Хц і тільки ємнісний опір Xc. З рис. (1—24) видно, що прикладена напруга U = = Um sin ωί однакова для всіх ділянок кола. За першим законом Кірхгофа для вузла алгебраїчна сума миттєвих значень струмів дорівнює нулю:
(1—76)
Оскільки активний струм іа збігається з напругою іа — = ZmSinto/, індуктивний струм Il відстає на , тобто Zl =
![]()
ємнісний струм іс випереджає напругу на
2
7-86
_
![]()
γ, i-с = ICm sin (ω* + yj , а загальний струм при Il> Ic відставатиме на кут ψ, і = /msin(otf — ψ), то, підставивши в (1—76), матимемо:
Zm Sin (ω* — φ) = Iam sin CO* + ILm sin (ω* — у) + Icm sin (со* + -jj ·
(1-77)
Рис.
I—24. Коло
змінного струму з паралельним з’єднанням
r,
Xl
і
Xc:
а
— схема кола; б — векторна діаграма
діючих значень струмів при IL
>
1C(XL
<
X
Су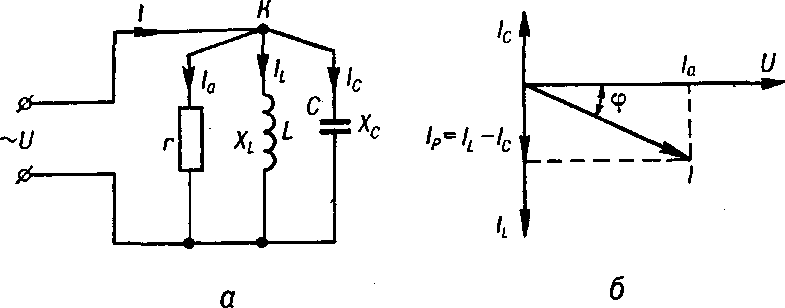
Рівняння (1—77) графічно зображено на векторній діаграмі (рис. 1—24, б) при Xl < Xe. З трикутника струмів векторної діаграми можна скласти важливі співвідношення:
 Ia
= I
cos
φ;
Ia
= I
cos
φ;
(1—78)
де Ip — результуючий реактивний струм.
Кут φ визначає величину зсуву фаз між загальним струмом і прикладеною напругою. Він залежить від співвідношення r, Xl і Xe. При сталому активному опорі r = const можливі три випадки:
При be > bL Il<Ic. При цьому кут φ > O і загальний струм випереджає напругу, тобто струм має ємнісний характер.
При be <bL Il > І с· Тут кут ψ < О і загальний струм відстає від напруги, тобто струм має індуктивний характер.
При be = bL Il= Ic- Кут φ = О, а результуючий струм збігається за фазою з напругою. Цей випадок розглянемо окремо.
У загальному випадку кут ψ змінюється в межах від + -5-
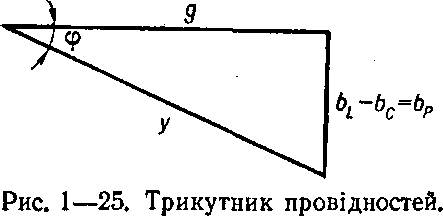
2 ’ 2*2 З трикутника струмів знайдемо трикутник провідностей, скоротивши кожну сторону його на величину напруги (рис.* 1—25), тобто
1
а
V
(1-79)
S'
— б>
и
U
. 1 1
bP'
и
~
У~ z



де g, b і «/ — відповідно активна, реактивна і повна провідності кола. J
З трикутника провідностей маємо: ^
cos
φ
(1-80)
у
sin
φ;
У = Увг + (Ьь-ЬеГ = Уё* +
де bp = bL — be — результуюча реактивна провідність.
Якщо у формулу (1 —80) підставити з (1—79) у = і з трикут-
. r . X .
ника опорів cos<p = -|-; sm <р то матимемо провідності, по
дані через опори:
S= і Ь = £, (1-81)
AzX = Xl-Xc- повний реактивний опір кола;
Z = Yr2 + X2 — повний опір кола.
Оскільки г і ZHe можуть мати від’ємних значень, а X може бути більше і менше нуля, то з виразів (1—79) і (1—81) випливає, що g і у також не можуть мати від’ємних значень. Тим часом b при X >0 додатне, а при Х< 0 — від’ємне.
З виразів (1—79) і (1—81) також випливає, що тільки повний опір кола Z і повна провідність у є оберненими величинами, тоді як опір г і активна провідність g, а також реактивний опір X і реактивна провідність b не обернені величини, лише при X = 0 g = -ί
і при r = 0 b = ~ .
З трикутника струмів легко дістати трикутник потужностей (рис. 1—26), помноживши кожну його сторону на величину прикладеної напруги. З трикутника потужностей матимемо вже відомі співвідношення (1—73), тобто формули потужностей при паралельному сполученні опорів такі самі, як і при послідовному.
Резонанс струмів. При паралельному сполученні активного, індуктивного і ємнісного опорів у колі змінного струму практичний інтерес становить випадок, коли в ньому однакові реактивні провідності: bL = Ьс. У цьому випадку будуть однаковими
І відповідні реактивні струми у вітках: Il = Ic.
Такий режим у паралельному колі змінного струму, коли струми у вітках з реактивними опорами однакові, називається резонансом струмів. Ураховуючи, що при резонансі bL = = be, повна провідність у = Yg2 + (bL — Ьс)г = g, а результуючий струм у колі / = Uy — Ug.
 Отже,
результуючий струм при резонансі
визначається тільки активною провідністю.
Але це не означає, що у вітках з індуктивним
і ємнісним опорами (рис. 1—24)
немає
струму. По кожній з них І
проходить
струм, пропорційний провідностям віток:
Отже,
результуючий струм при резонансі
визначається тільки активною провідністю.
Але це не означає, що у вітках з індуктивним
і ємнісним опорами (рис. 1—24)
немає
струму. По кожній з них І
проходить
струм, пропорційний провідностям віток:
Il = U ■ bL \ Ic = U ■ bc, (1-82)
Ql-Qc=Q
О
Рис. 1—26. Трикутник потужностей Рис. I—27. Крива струму у функ- при паралельному з’єднанні г, Xl і Xc. ції частота при /,=Const1 C=const.
але ці струми взаємно компенсуються як протилежні за фазою. Якщо в колі немає активного опору, тобто г = 0, то g = 0 і результуючий струм дорівнюватиме нулю: I = U- g = 0.
При цьому у вітках з індуктивним і ємнісним опорами створюється ніби самостійне коло без зовнішнього джерела напруги. У колі відбувається коливальний процес, при якому струм підтримується без зовнішнього джерела. Але, якщо вимкнути зовнішнє джерело напруги, то цей процес швидко погасне, бо в колі завжди g > 0, тобто існує активна провідність, в якій витрачається активна енергія, і процес гасне практично за частки секунди.
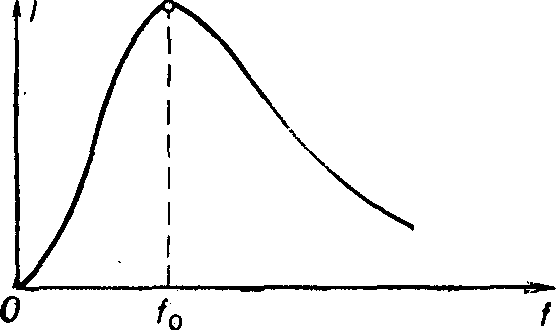
На рис. 1—27 зображено криву результуючого струму залежно від частоти. Найменший струм у колі буде при резонансі, бо при цьому зменшується провідність (збільшується загальний опір). Резонансну частоту знаходимо з умови, що bL = be, тобто
![]()
Практично резонанс струмів дістають, змінюючи індуктивність або ємність при постійній частоті джерела струму. Явище резонансу струмів широко використовують для підвищення коефіцієнта потужності.
Потужність при резонансі струмів. При резонансі струмів між генератором і колом проходитиме тільки активний струм,
який за фазою збігається з-напругою: Ia = U-g =■ —■ . Коефіцієнт потужності при цьому cos <р = 1. Повіка потужність кола дорівнює активній потужності: S = Ula = P.
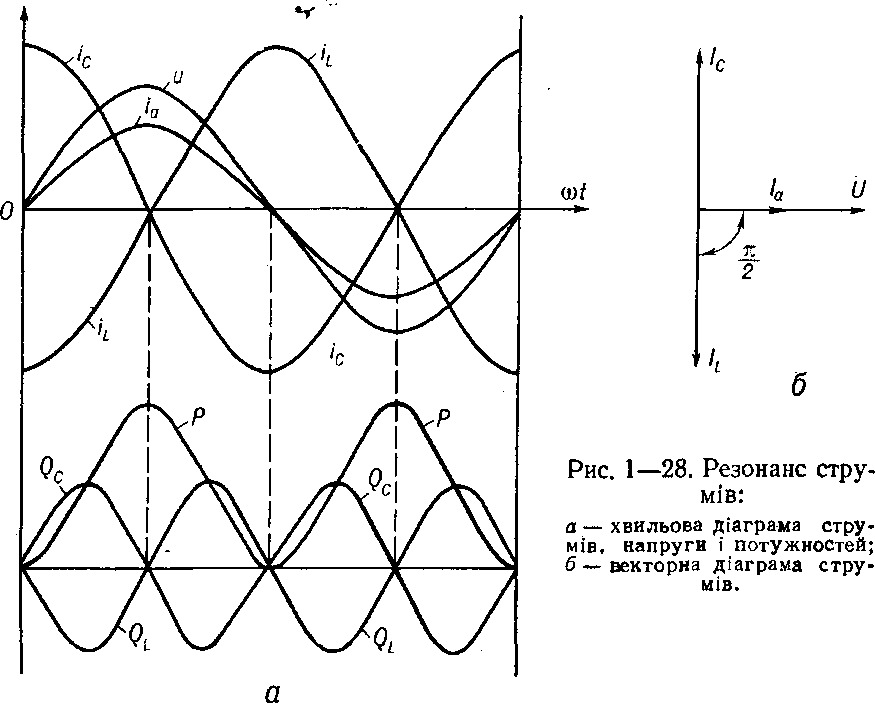
Генератор і лінія електропередачі будуть повністю розвантажені від реактивного струму, що приводить до зменшення втрат енергії і до збільшення к. к. д. передачі. На рис. 1—28, а, б зображено хвильову діаграму струмів і потужності, а також векторну діаграму струмів при резонансі.
1—12. ТЕХН1К0-ЕК0Н0МІЧНА ЕФЕКТИВНІСТЬ КОЕФІЦІЄНТА ПОТУЖНОСТІ (cos φ) і СПОСОБИ ЙОГО ПІДВИЩЕННЯ
Основні споживачі електричної енергії (електричні двигуни, зварювальні апарати, дугові та індукційні печі, трансформатори) забирають активну і реактивну енергію струму; при цьому струм відстає за фазою від напруги. Активний струм іде на виконання
корисної роботи, реактивний — на створення електромагнітних полів. Тому електрична станція передає до споживачів як активну, так і реактивну енергію.
Як відомо з попередніх параграфів, при активних споживачах (електричні лампи, електронагрівальні плитки, утюги, повністю завантажені двигуни тощо) струм збігається за фазою з напругою, коефіцієнт потужності дорівнює одиниці cos φ = 1. При реактивному навантаженні струм відстає або випереджає напругу на кут
і коефіцієнт потужності дорівнює нулю: cos φ = 0.
Активна потужність P = UI cos φ пропорційна коефіцієнту потужності cos φ. При реактивному навантаженні cos φ = 0, тому активна потужність P = UI cos φ = 0.
' Реактивна потужність Q = UI sin φ найбільше значення матиме при sin φ = I, і в колі протікатиме струм І =·- . Але корисна робота дорівнюватиме нулю. Отже, виходить, що за такої умови на електростанціях спалювалося б цінне паливо без користі. Це, зрозуміло, недопустимо. Але ми розглянули два крайні випадки. На підприємствах коефіцієнт потужності завжди більший від нуля і коливається залежно від співвідношення активних і реактивних споживачів, від навантаження електродвигунів, трансформаторів тощо. Оскільки на практиці всі споживачі сполучають паралельно, то в колі завжди діятиме результуючий активний струм Σ/α, результуючий реактивний струм ΣΙΡ і загальний струм І, який з трикутника струмів дорівнює: І =
= У(£1аУ + (Σ/ρ7\
Поперечний переріз обмоток генераторів розраховують на загальний струм, який проходитиме по цих обмотках. Величина загального допустимого струму визначає при заданій напрузі величину допустимої позірної потужності S, яку може видати в сітку генератор:
S = UI=U VWHfT(Щ2. (1-84)
Тому на генераторах змінного струму і трансформаторах зазначено не активну, а позірну потужність у вольтамперах (ва) або кіло- вольтамперах (ква). Найбільша активна складова потужності генератора залежатиме від величини коефіцієнта потужності споживачів:
P P
P = UI cos φ і cos ф = — = -к · т т UI S
Чим вищий cos φ, тим краще використовується генератор станції, тим більше виконується корисної роботи на підприємствах, тим вищий к. к. д. станції і лінії електропередач. Коефіцієнт потуж-
ності споживачів вважають нормальним, якщо він лежить у межах 0,85—0,95. Коли він нижчий, то це означає, що підприємство працює з недовантаженим електричним обладнанням і на нього накла: дають штраф; при високому cos φ підприємства преміюють.
s Причиною низького cos φ є те, що двигуни, індукційні печі, трансформатори тощо працюють не на повну потужність. Дійсно, повністю завантажений двигун, індукційна піч тощо мають cos φ, близький до 0,85—0,9, тоді як при малих навантаженнях cos φ знижується до 0,2—0,4.
Підвищення cos φ на 5% у нашій країні дасть економію в мільйони карбованців. Ось чому перед енергетиками поставлено велике завдання — повсякденно боротися за підвищення коефіцієнта потужності. Існують два основні шляхи підвищення cos φ.
Усі основні споживачі, які створюють активно-індуктивне навантаження (асинхронні двигуни, трансформатори, індукційні печі тощо), повинні працювати якнайдовше в повністю завантаженому режимі; не слід допускати роботи в холостому режимі. Якщо потужність, наприклад, двигуна велика і не може бути використана, його слід замінити двигуном відповідно меншої потужності.
Штучне підвищення cos φ: а) установлення синхронних двигунів (компенсаторів), які в певному режимі роботи подають у сітку потрібний для двигунів і трансформаторів реактивний струм (див. розділ VII); б) вмикання паралельно споживачам батареї конденсаторів (з паперово-масляною ізоляцією), тобто створення режиму роботи кола, близького до резонансу струмів. Потрібну ємність такої батареї конденсаторів знаходять так.
Якщо коефіцієнт потужності до вмикання ємності був cos <plf який треба підвищити до cos φ2 при заданій установленій потужності P і напрузі U, то реактивна потужність без конденсатора
Qi = P tg φχ.
Реактивна потужність з конденсатором, що відповідає cos φ2,
Q2 = P tg φ2·
Реактивна потужність конденсатора Qc = Qi— Qa = P(tg ψι —
tg φ*)·
З другого боку, відомо, що реактивну потужність конденсатора знаходять з формули: Qc = Ulc = U — = U2 = 2TzfCU2.
Ac J_
соС
Прирівнявши праві сторони останніх двох рівнянь, знайдемо потрібну ємність:
С==Щ7* (tS — tg?*)· (1—85)
В умовах промислового підприємства споживана ним активна і реактивна потужності безперервно змінюються відповідно до режиму роботи підприємства. Це означає, що безперервно змінюється cos φ.
Для розрахунку за споживану енергію, ураховуючи cos φ, на підприємствах установлюють лічильники активної і реактивної енергії, за показами яких знаходять середнє значення cos φ за розрахунковий період часу, наприклад місяць, квартал і т. д.:
it
Wa = ^P-dt, Wp = ^Q-dt, 'ζξ = tgf. (1—86)
о
Знаючи tg φ, знаходять cos φ, за яким розраховують потрібну ємність для підвищення коефіцієнта потужності підприємства, якщо в цьому є потреба, або безпосередньо знаходять так званий коефіцієнт потужності за формулою:
(cos
<р)Ср
= . (1-87)
/(SiW7W'
13. ІНДУКТИВНА КОТУШКА З СТАЛЬНИМ СЕРДЕЧНИКОМ У КОЛІ ЗМІННОГО СТРУМУ
У § 1—7 для кола змінного струму з індуктивністю ми не враховували вплив сталі на величину індуктивності. Тим часом у фор- . г Swi
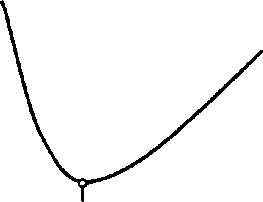
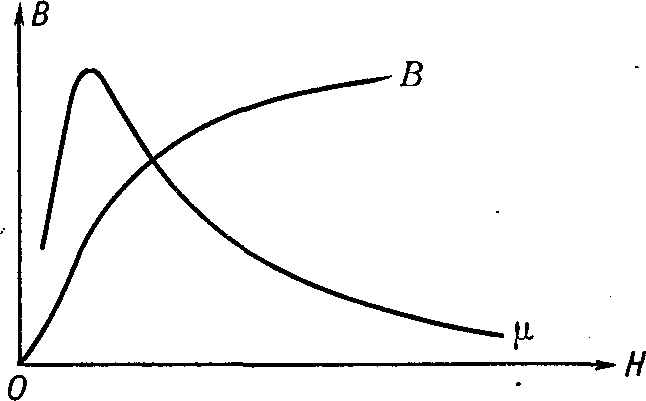
мулу індуктивності L = μ -η- входить магнітна проникність μ, величина якої для сталі значно більша, ніж для повітря, внаслідок чого коефіцієнт самоіндукції (при інших однакових умовах) і індуктивний опір Xl = ωί, для котушок з стальним сердечником значно більші, ніж для котушок без сердечника. Крім того, коли в котушці є стальний сердечник, то коефіцієнт самоіндукції стає величиною змінною, бо із збільшенням магнітної індукції змінюється магнітна проникність В (рис. 1—29). Додамо, що при наявності сердечника збільшуються й втрати енергії, тобто до втрат у міді додаються втрати у сталі на вихрові струми і гістерезис.
Оскільки котушки з стальним сердечником дуже поширені (електричні машини, трансформатори, електромагнітні реле), розглянемо їх докладніше.
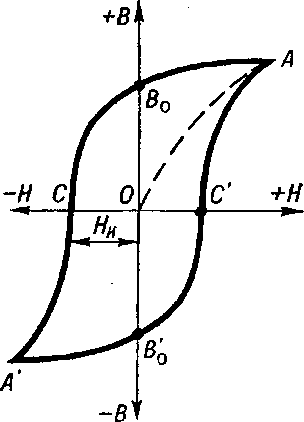
Нагадаємо, що крива намагнічування феромагнітних матеріалів (рис. 1—ЗО) В = /(H) спочатку зростає приблизно прямолінійно, а потім стає майже горизонтальною. Це відповідає магнітному насиченню феромагнітного матеріалу. Якщо з певного моменту зменшувати струм намагнічування, то нові значення В будуть вищі від початкової кривої намагнічування (штрихова крива OA на рис. 1—ЗО). Коли струм намагнічування дорівнюватиме нулю, магнітна індукція не дорівнюватиме нулю — матеріал зберігає магнітні властивості. Ордината OB0 (рис. 1—ЗО) називається з а- лишковою індукцією, або залишковим магнетизмом.
Явище відставання зміни намагнічування від зміни намагнічуючого струму або напруженості магнітного поля називається гістерезисом.
Рис.
1—29.
Крива
намагнічування В
=
f (H)
і
крива магнітної проникності.
Цю властивість феромагнітних матеріалів використовують для виготовлення постійних магнітів.
Процес намагнічування докладно вивчив російський учений проф. А. Г. Столетов. З 1871 р. його випробування і висновки лягли в основу розрахунку електричних апаратів, магнітні кола яких виконані з феромагнітних матеріалів (залізо, сталь, нікель, кобальт
 і
сплави: магніко, пермалой та ін.). Так, у
звичайній вуглецевій сталі Biy
—
0,95
тл,
Hk
= 4000 аім.
У сплаві магніко з заліза, нікелю,
алюмінію, кобальту і міді, що йде на
виготовлення постійних магнітів, Bts
=
і
сплави: магніко, пермалой та ін.). Так, у
звичайній вуглецевій сталі Biy
—
0,95
тл,
Hk
= 4000 аім.
У сплаві магніко з заліза, нікелю,
алюмінію, кобальту і міді, що йде на
виготовлення постійних магнітів, Bts
=
1,33 тл і Hk = 46000 аім. Це так званий магнітотвердий матеріал.
В електричних машинах і апаратах змінного струму створюється змінний магнітний потік, який, перетинаючи сердечник, збуджує в ньому вихрові струми. Ці струми можуть нагріти сердечник так, що нормальна робота машини стане неможливою. Щоб зменшити втрати енергії на Рис. 1—30. Гістерезисна вихрові струми, застосовують спеціальні петля. сталі (з добавкою кремнію 4,8%) з вели
ким питомим опором і, крім того, сердечники виготовляють з тонких листів сталі (0,3—0,5 мм), ізольованих один від одного. У магнітопроводах з феромагнітного матеріалу внаслідок гістерезису при перемагнічуваннях витрачатиметься певна енергія на знищення залишкового магнетизму. Втрати на гістерезис за один цикл визначаються площею гістерезисної петлі. Щоб зменшити втрати на гістерезис, застосовують спеціальні
сплави з малим Нк. Наприклад, для вуглецевої сталі з добавкою кремнію Hk = 32—48 а/м, а для сплаву пермалою з заліза, нікелю, молібдену та ін. Hk — 0,32 а/м. Це так звані магнітом’які матеріали.
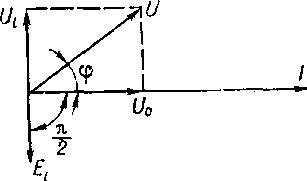
На рис. 1—31 зображено котушку з числом витків w і замкнений магнітопровід (сердечник), на стержні якого закріплена ця котушка. Котушка електрично ізольована від сердечника. Якщо до кінців котушки підвести змінну синусоїдальну напругу и = = Um sin со/, то по ній піде струм І, який створить намагнічуючу
Рис.
1—31.
Котушка
з стальним сердечником.
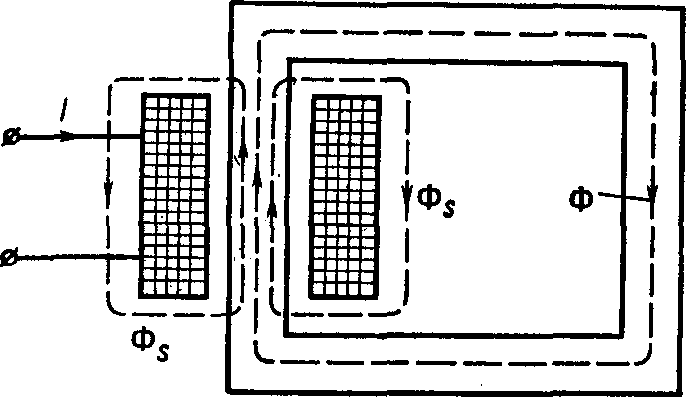
![]()
Якщо потік змінюється за синусоїдальним законом Ф = = Фт sin со/, то
е = —W = ахюфт sin (со/ — —j = £m sin (со/ — ~j, (1—88)
де Em = (awФт.
Переходячи до діючого значення, матимемо:
Е==Щ = 2ПхюФт = 4>44^ф- (1-89)
З (1—88) видно, що е. р. с., яка створюється основним потоком, відстає від нього на кут 90°. Потік розсіювання Ф5 створює у витках котушки е. р. с. розсіювання Es, про що докладніше буде далі. При проходженні струму по котушці на її активному опорі г буде спад напруги I r = Ua. Оскільки е. р. с. розсіювання Es і спад
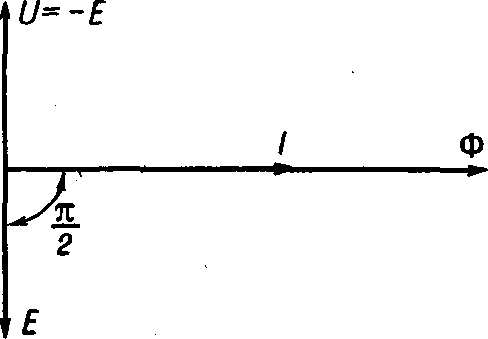
напруги на активному опорі Ua порівняно з прикладеною напругою незначні (менше 0,5% від U), тимчасово виключимо їх із розгляду і спинимося лише на основних фізичних процесах, які виникають у котушці з сердечником при змінному струмі. При цих умовах за другим законом Юрхгофа дляфозглядуваного кола можна записати U + E = 0, або U = — Е.
Рис.
I—32.
Векторна
діаграма котушки з сердечником при Ф5
=
0 і
г
=
0.
U
V"
"І
Ф
V
£
Рис.
1—33.
Векторна
діаграма
котушки
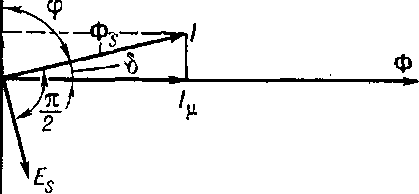
з сердечником з урахуванням втрат
на гістерезис і вихрові струми при г
=
0.
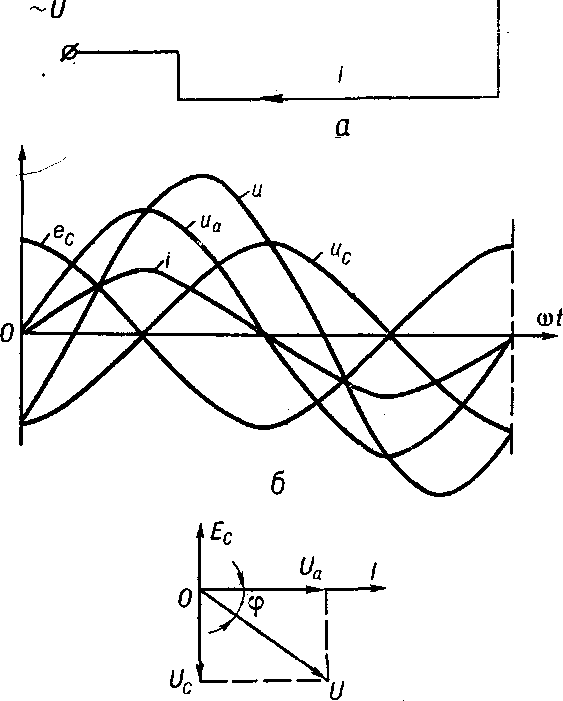
Величина спотворення форми кривої струму буде тим більша, чим більше насичена сталь. Важливою особливістю такого кола є те, що в котушці розсіюватиметься енергія на покриття втрат у сталі на гістерезис і вихрові струми, навіть коли активний опір обмотки дорівнює нулю: г = 0. Це так звані активні втрати в сталі.
Тому загальний струм / (див. рис. 1—33) складається з активної складової Icnu яка збігається за фазою з напругою, і реактивної складової/μ, яка збігається за фазою з основним потоком Ф.
З векторної діаграми (рис. 1—33) знаходимо:
"Icm = I cos φ = / sin δ, /μ = I sin ψ = I cos 8,1 =y Itcm + if, (1—90)
де δ — кут магнітного запізнення, або кут втрат у сталі, величина якого залежить від активних втрат у сталі.
Знаючи загальний струм І, векторну діаграму (рис. 1—34) будують так. Під кутом ~ від основного потоку Ф проводимо вектор
e. p. с. t, яка наводиться у витках котушки цим потоком. Напруга U' = — E зрівноважує е. р. с. і перебуває у протифазі з Е. Від кінця вектора U' паралельно напряму струму / відкладаємо спад напруги на активному опорі котушки Ir. У напрямі струму проводимо потік розсіювання Ф5, який наводить е. р. с. розсіювання Es,
що відстає від Ф8 на кут у. Е. р. с. розсіювання зрівноважує
напруга розсіювання Us = IXs, яка перебуває з нею у протифазі. Тому до вектора Ua додається Us і утворюється вектор прикладеної напруги сітки U. Таким чином, вектор прикладеної напруги
Us = IXs
U0=It
U=-E
Рис.
1—34.
Векторна
діаграма котушки з сердечником
при
г
Ф
Oi
Φ5=£
0.

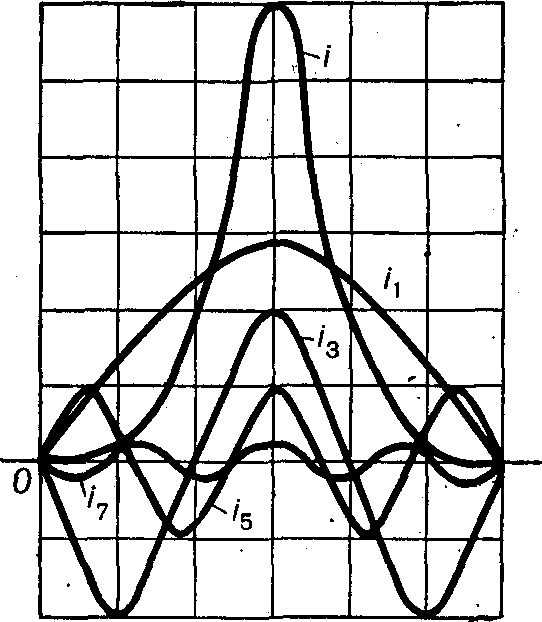
Як бачимо з рис. 1—35, потік відстає за фазою від струму, а сам струм є несинусої дальним. Несинусоїдальний струм, а також несинусоїдальну е. р. с. можна розкласти в ряд Фур’є, який складається з суми синусоїд з частотами, кратними основній частоті ω, які називаються г а р м о-
н і к а м и:

-ψι)
+
+
(1-92)
Де hmi hm, ... — амплітуда гармонік; ψχ, ψ2, ... — початкові фази гармонік; I0 — стала складова.
Із загального виразу для діючого значення струму / =
/~ТГ~
= Ί / -ψ I i2dt можна написати діюче значення несинусоїдаль-
ного струму, який дорівнює кореню квадратному з суми квадратів діючих значень окремих гармонік:
' “ Vl\ + 1\ + I\ + I\+ ■■ +Il (1-93)
Відношення ~ = δ називається коефіцієнтом спотворення.
Рис.
1—35. Вплив
гістерезису на форму кривої струму в
котушці з сердечником.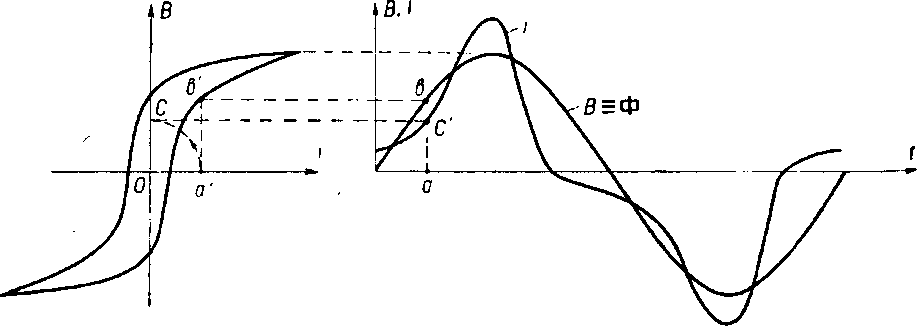
У ряді можуть бути відсутні окремі гармоніки. Розклад неси- нусоїдальної е. р. с. або струму може бути практично достатньо точним, якщо взяти кілька найістотніших членів ряду. Для розглядуваного випадку несинусоїдальний струм (рис. 1—35) можна замінити першою, третьою, п’ятою і сьомою гармоніками (рис. 1—36). Щоб знайти значення несинусоїдального струму, досить у будь- який момент часу алгебраїчно додати значення струмів усіх гармонік. Оскільки на векторних діаграмах зображають тільки синусоїдальні величини, то для зображення несинусоїдальної величини умовно її можна замінити еквівалентною синусоїдою, діюче значення якої дорівнює діючому значенню несинусоїдального струму.- Еквівалентна синусоїда струму повинна так розміщатись відносно синусоїди напруги сітки, щоб середня потужність кола за один період
т
P = Y^uidt
о
дорівнювала потужності, яка визначається за формулою
P = UI cos φ,
де І — діюче значення еквівалентного струму.
Рис.
1—36.
Розклад
несинусоїдального струму на ряд
синусоїдальних гармонік.
Активна потужність втрат в обмотці котушки (втрати в міді)
(1-94)
Якщо нехтувати незначними спадами напруг Ua і Us (рис. 1—34), то U = -E, тоді активна потужність втрат у сталі на гістерезис і вихрові струми буде
Pcm = Pa + Pe = UI cos ψ = UIsmb.
(1-95)
Повна активна втрата в котушці з сердечником
r.
+ f
—
г/
де гк — активний опір котушки без сердечника; г — активний опір котушки з стальним сердечником, який складається з активного опору обмотки котушки тк і активного опору, зумовленого втратами потужності Pcm в сталі магнітопроводу:
(1-97)
Практично втрати в сталі на гістерезис і вихрові струми відносять до одного кілограма сталі (вт/кг); для різних марок сталей їх визначають експериментально і подають у довідниках.
Для прикладу наводимо табл. 1—1.
Втрати в сталі на гістерезис і вихрові струми можна підрахувати за такими емпіричними формулами при індукції Bm > 1 тл:
Pe = 0,Obe /2Bm [вт/кг], Pe = O1Olae f2Bm [вт/кг],
де f — частота перемагнічування; ае — коефіцієнт, що залежить від сорту сталі і дорівнює 3,0—4,4; ав — коефіцієнт, що залежить від товщини листів та сорту сталі і дорівнює 0,6—5.
Таблиця 1—1
Втрати на гістерезис і вихрові струми в листовій електротехнічній сталі
|
Товщина |
Втрати в |
ет/кг при |
Марка сталі |
листа в мм |
індукції в тл |
|
|
при f = 50 гц |
1 |
1,5 |
Э1 (слабколегована з добавкою крем |
0,5 |
3,6. |
8,6 |
нію до 1,5 %) |
|
|
|
34 (високолегована з добавкою крем |
0,5 |
1,8 |
3,9 |
нію до 5%) |
0,35 |
1,45 |
3,4 |
З таблиці і формул видно, що втрати в листової сталі залежать від частоти перемагнічування, магнітної індукції і товщини листів. У практиці для зменшення втрат сталі збільшують електричний опір магнітопроводу, застосовуючи високолеговані листові сталі (з добавкою кремнію до 5%). Листи завтовшки 0,35—0,5 мм для частоти f = 50 гц ізолюють лаком.
Розділ II
г
1. ЗАГАЛЬНІ ВІДОМОСТІ
Багатофазною системою змінного струму називають сукупність кількох електричних кіл, в яких діють електрорушійні сили однакової частоти, зсунуті за фазою одна відносно одної. Найпростіший багатофазний генератор за будовою нагадує однофазний, з тією відмінністю, що він має кілька обмоток (фаз), осі яких зміщені одна відносно одної на певні кути. Обертаючи з сталою кутовою швидкістю в однорідному магнітному полі таку систему з т обмоток, матимемо m-фазний генератор. Усі е. р. с., індуковані в обмотках, будуть зміщені за фазою на кути, що дорівнюють кутам між осями обмоток.
Багатофазну систему синусоїдальних е. р. с. (або струмів) називають симетричною, якщо всі е. р. с. (або струми)"однакові за величиною і кожна еГр. с. (або струм)ивідстає (або випереджає) за фазою від попередньої е. р. с. (або струму) на однаковий кут. Якщо не задовольняються ці умови, то система е. р. с. (або струмів) несиметрична.
Багатофазну систему електричних кіл називають незв’язаною (див. рис. 2—2), якщо кола, які утворюють цю систему, не сполучені електрично між собою. Якщо ж кола електрично сполучені, то багатофазну систему називають з в’я з а н о ю (див. рис. 2—3). На практиці більше поширена зв’язана система. Зв’язані багатофазні системи називають багатофазними колами. Багатофазні кола, в яких загальні опори всіх фаз однакові, називають симетричними; якщо опори неоднакові, то багатофазні кола несиметричні.
Кожна обмотка генератора має два кінці, один з яких називають початком обмотки, а другий — кінцем. Вибір початків і кінців обмоток взагалі довільний. Але в багатофазних генераторах доцільно називати початками і кінцями відповідні, симетрично
розміщені, кінцеві точки обмоток. У такому разі система е. р. с. буде симетричною, якщо до цього умовно вибрати напрям усіх е. р. с. від початків до їх кінців або навпаки — від кінців обмоток до їх початків.
Найбільш поширеною багатофазною системою є трифазна система змінного струму, основоположником якої є видатний російський інженер-електрик М. Й. Доливо-Добровольський (1862—1919).
Системою трифазного змінного струму називається сукупність трьох струмів однієї частоти, які проходять по трьох колах під
дією трьох е. р. с., зсунутих за фазою на ^ періоду, або на 120
Рис.
2—1.
Добування
трифазного змінного струму: а—модель
трифазного генератора; б — хвильова
діаграма синусоїдальних е. р. с.
в
котушках.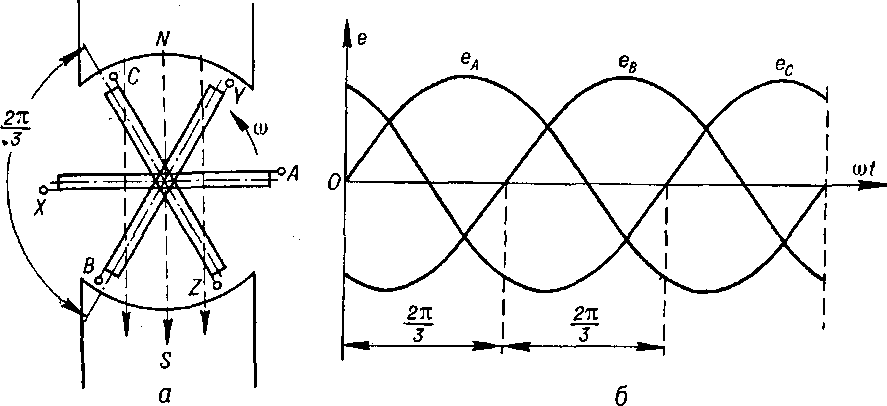
електричних градусів. Основною перевагою трифазної системи перед однофазною є те, що вона забезпечує передачу і розподіл енергії з меншими втратами і з меншою витратою проводів. Крім того, трифазна система дає можливість створювати обертове магнітне поле, що використовується в двигунах трифазного струму, які мають безперечні технічні і техніко-економічні переваги перед однофазними двигунами.
Вироблення трифазного змінного струму розглянемо на моделі трифазного генератора (рис. 2—1, а), подібного за будовою до однофазного.
У полі електромагніту міститься стальний циліндр-ротор, на поверхні якого укріплені три однакові обмотки (фази) з початками А, В, C і відповідними кінцями X, Y, Z. Обмотки зсунуті в просторі
2it . g. 360° одна відносно одної на кут ^ радіан, або електричних градусів, де р — число пар полюсів у генераторі.
2к
При одній парі полюсів (рис. 2—1, а) цей кут дорівнює = 120°.
Якщо ротор обертати рівномірно з кутовою ШВИДКІСТЮ CD проти руху годинникової стрілки, то в котушках наводитимуться синусоїдальні
е. р. с. з однаковими частотами і амплітудами, але зсунуті за фазою
2π
на кут -ji утвориться симетрична система е. р. с., що можна записати так:
еА = Em sin ωί,
(2-1)
ес
■
Зміну e. p. с. з часом графічно зображено на рис. 2—1, б. Якщо замкнути всі три фази через однакові за величиною і характером споживачі (рис. 2—2) Za = Zb = Zc = Z = г, то дістанемо незв’я- зану трифазну систему кіл, по яких проходить симетрична система
Рис.
2—2. Незв’язана трифазна система.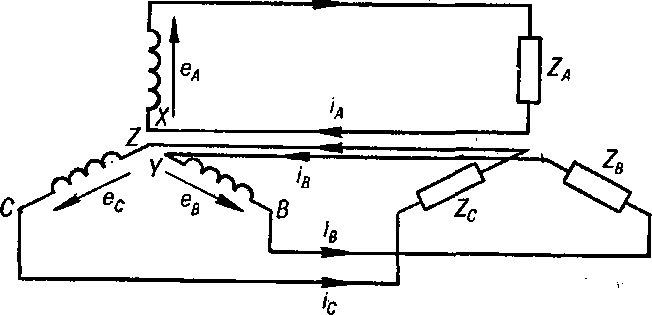
струмів іа = ів — іс, які аналітично можна виразити рівняннями: іа = Im sin ωί,
2π
(2-2)
4it\
-Tj-
ІС = ZmSinjw/
Графічно ці струми зображають подібно до е. р. с. Як видно з рис. 2—2, для передачі енергії потрібно шість проводів. Для створення зручнішої і вигіднішої трифазної системи кінці обмоток генератора і споживачів електрично сполучають зіркою або трикутником, причому спосіб сполучення обмоток генератора не вирішує наперед способу сполучення споживачів.
Сполучення обмоток генератора зіркою вважають таким, коли всі початки або кінці обмоток мають одну спільну, так звану нейтральну (або нульову) точку (рис. 2—3). Зв’язок між генератором і споживачами здійснюється електричними проводами,
що йдуть від кінців усіх обмоток, а іноді і від нейтральної точки генератора. Провід, що йде від кінця обмотки генератора до споживача, називається лінійним, а· той, що йде від нейтральної (або нульової) точки,— нейтральним (або нульовим) проводом.
При сполученні обмоток генератора багатокутником (трикутником) початок обмотки кожної фази сполучають з кінцем обмотки наступної фази (див. рис. 2—12). Зв’язок генератора з споживачами здійснюється лінійними проводами, що виходять із спільних точок обмоток генератора.
Е. р. с., що індукується в обмотках генератора, напруги на затискачах цих обмоток, і струми, що проходять по них, називають фазними е. р. с. (вф, Еф), напругами («ψ, L/φ) і струмами (іф, Іф), а напруги між сусідніми лінійними проводами і струми, що проходитимуть у них, — лінійними напругами (ил, U4) і струмами (іл, 1Л).
Сполучення споживачів зіркою і багатокутником виконують аналогічно до відповідних сполучень обмоток генератора. Визначення фазних і лінійних напруг і струмів для споживачів залишаються такими самими, як і для генераторів.
Надалі умовимось у багатофазній системі кіл струми напрямляти так, щоб всі лінійні струми були напрямлені до споживачів (рис. 2—3), а фазні струмив сторонах багатокутника (див. рис. 2— 12)— проти руху годинникової стрілки. Фазні струми в променях зірки споживачів сходитимуться в нейтральній точці. Результуючий струм і0 по нейтральному проводу піде до нейтральної точки генератора.
Напрями всіх е. р. с. і напруг відповідатимуть напрямам відповідних струмів.
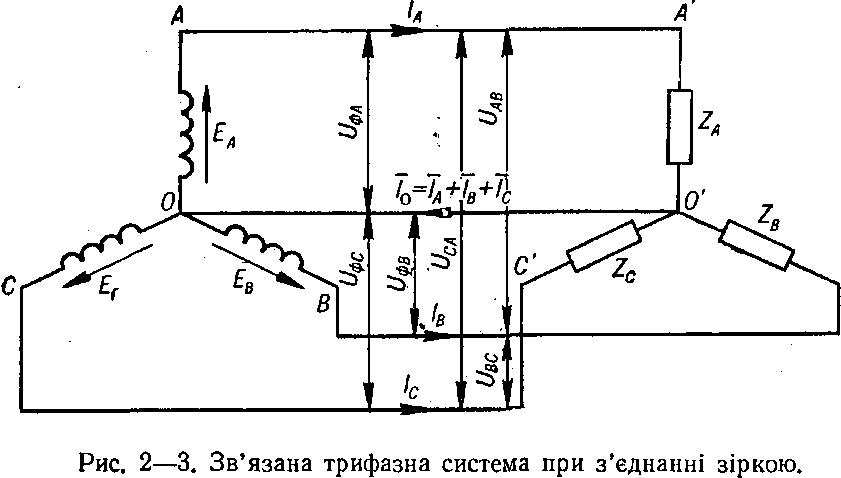
На рис. 2—3 зображена схема сполучення зв’язаної трифазної системи зіркою. Якщо система симетрична, то діючі значення е. р. с. усіх фаз однакові між собою: Ea = Eb = Ec = Еф і зсунуті під кутом 120° одна відносно одної. При однаковому навантаженні всіх фаз будуть рівні між собою і фазні напруги:
УфА— Uфв= ифС= ί/φ.
Діючі значення лінійних напруг дорівнюють геометричній різниці двох фазних напруг:
δ
Рис.
2—4. Векторна
діаграма напруг при з’єднанні зіркою.
'в
(2-3)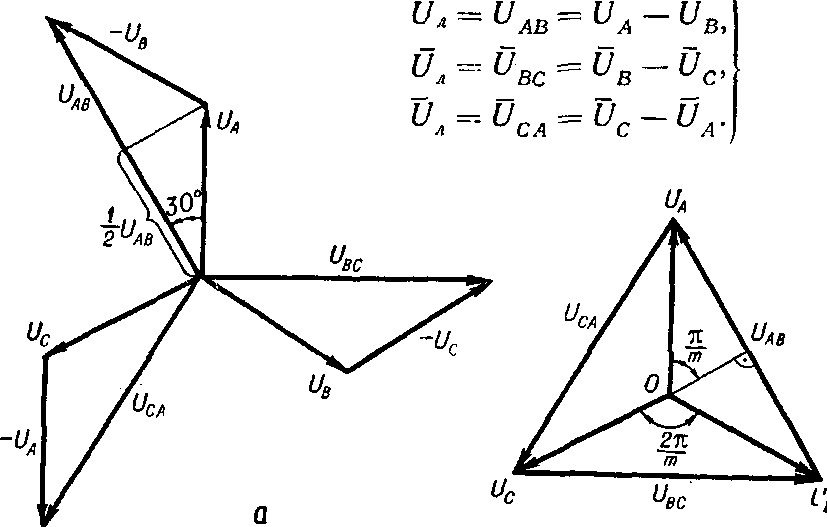
Побудувавши векторну діаграму фазних напруг, дуже легко знайти напрям і величину вектора лінійної напруги (рис. 2—4). Як видно з векторної діаграми, вектори лінійних напруг випереджають відповідні фазні напруги на кут 30°. Опустивши перпендикуляр з вектора Ua на вектор Uab, легко знайти співвідношення між лінійною і фазною напругами:
4-^лв= ^cos3q0-. Uab = Vzua або ил = угиф.
У загальному випадку співвідношення між лінійною і фазною напругами знаходять так (рис. 2—4, б):
![]()
Звідси випливає, що лінійна напруга залежно від кількості фаз різко змінюється. Так, при т = 2 Ua- 2U ф, при т = 3 Ua =
= VbUф, при т- 6 Ua — ϋφ і т. д.; інакше кажучи, із збільшенням числа фаз при U^ = const, лінійна напруга зменшується. Крім того, збільшення числа фаз (більше трьох) веде до ускладнення машин і всіх пристроїв. У сучасній електротехніці шести-
і дванадцятифазний струм застосовують для живлення ртутних випрямлячів.
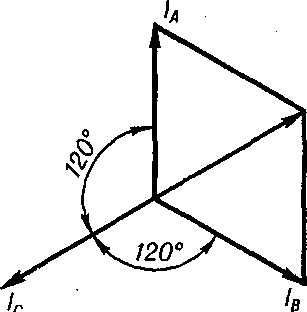
При сполученні зіркою лінійні струми іАа, Iba і Ica дорівнюють відповідним фазним І Аф, ІВф, ІСф, а струм у нульовому проводі I0 дорівнює геометричній сумі діючих значень усіх фазних
струмів: I0 = 1Аф + ~івф + ісф = /ал +^&і + їсл-
У випадку симетричного навантаження всі струми будуть однакові між собою, а їх геометрична сума дорівнюватиме нулю
(рис. 2—5): 7„ = ІАф + Івф + ісф — 0. У такому випадку нульовий провід можна не застосовувати.
 Симетричне
навантаження створюють асинхронні
двигуни, трифазні ртутні випрямлячі
тощо. Але на практиці важко додержати
симетричного навантаження, тому нульовий
провід застосовують обов’язково,
але його переріз беруть меншим, ніж
переріз лінійного проводу, оскільки по
ньому йде результуючий струм, який
завжди менший від лінійного.
Симетричне
навантаження створюють асинхронні
двигуни, трифазні ртутні випрямлячі
тощо. Але на практиці важко додержати
симетричного навантаження, тому нульовий
провід застосовують обов’язково,
але його переріз беруть меншим, ніж
переріз лінійного проводу, оскільки по
ньому йде результуючий струм, який
завжди менший від лінійного.
Слід зауважити, що на схемах усі струми та е. р. с. позначають так, як на рис. 2—3. Насправді всі три електрорушійні сили і струми не можуть . <
мати той самий знак, тобто не можуть Рис· 2—5· ВектоРна діаграма ^ . J симетричних струмів при з ед-
бути напрямлені одночасно до почат- на£ні споживачів зіркою, ків або до кінців фаз. Частина е. р.с.
і струмів у певний момент часу (див. рис. 2—1, б) має один напрям, а частина — інший. Сума е. р. с. або струмів фаз у будь-який момент часу дорівнює нулю. Якщо всі споживачі однакові і становлять активне навантаження, то фазні струми збігатимуться за фазою з відповідними фазними напругами (рис. 2—6). При активно- індуктивному навантаженні фаз вектори струмів відставатимуть на відповідні кути φ від фазних напруг (рис. 2—7), а при активно-ємнісному навантаженні струми випереджатимуть фазні напруги. При несиметричному навантаженні у фазах будуть різні струми. Це призводить до так званого «перекосу фаз»,’ що негативно впливає на роботу генератора. Тому на практиці намагаються навантажувати всі фази приблизно рівномірно.
,(Див
/‘ якц^йс. 2—4) можна добудувати так звану ЛІ’тзк> Ik перенести вектори лінійних напруг
,.- ^ вони сполучали відповідні вектори H Cu· У б). Сторони рівнобедреного трикут-
K »
міститься
нульова
фазних напруг.
^abS. |
JА |
|
V |
3 .і І ЗІ |
/ ^bc , |
JjffM на^
Л) Для Ijj1Vr і Рис. 2—7. Векторна діаграма напруг і
liHo- струмів для рівномірного активно-ін- # >401°· фаз дуктивного навантаження фаз при
H'f дьова з’єднанні зіркою (до схеми рис. 2—3),
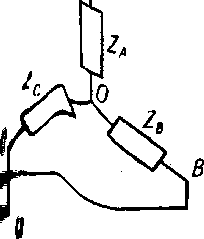 (4рИЧНоЛ>чка
зміщуватиметься від центра три- fi*
фазні Ij1V
навантаженні і відсутності нульо- iI
)8
иаі% ^Пруги без нульового проводу можуть
^ii,
^ra
буде на тій фазі, де більший опір
(4рИЧНоЛ>чка
зміщуватиметься від центра три- fi*
фазні Ij1V
навантаженні і відсутності нульо- iI
)8
иаі% ^Пруги без нульового проводу можуть
^ii,
^ra
буде на тій фазі, де більший опір
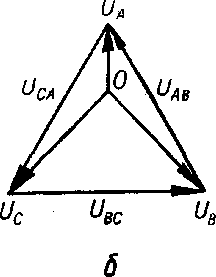
сп\
(> -' рвачів зіркою без нульового проводу: °Чографічна діаграма при Zjii < Zq = Zq.
Так, якщо на рис. 2—8, a Za < Zb = Zc, то на топографічній діаграмі напруга на фазі Л буде менша від двох інших (рис. 2—8, б). При Za = со (обрив кола фази А) і Zb = Zc напруга на фазі А стає значно більшою, ніж на двох інших (рис. 2—9), а нульова точка лежить на самому лінійному векторі напруги Ubc.
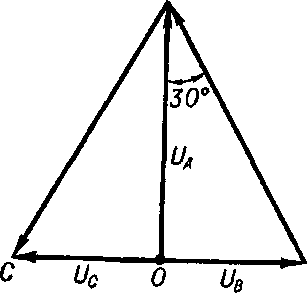
Рис.
2—10.
Топографічна
діаграма при ΖΑΦΖΒΦ
Zc
(до
схеми рис. 2—8).
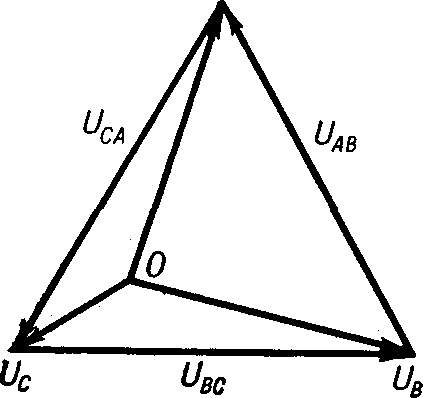
У загальному випадку при несиметричному навантаженні, коли Za Ф Zb Ф Zc фазні напруги прямо пропорціональні опорам
а
— схема з'єднання; б — топографічна
діаграма.
Рис.
2—11.
З’єднання
споживачів зіркою без нульового проводу
при Za
= 0; Zb
—
Zc.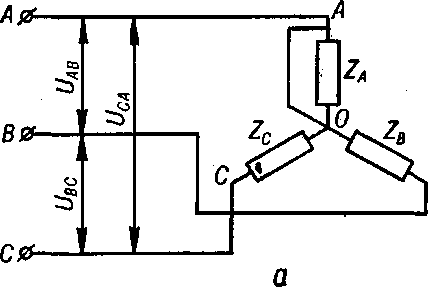

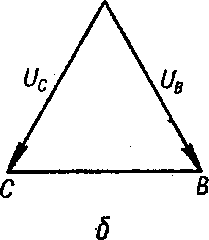

результуючий струм, і фазні напруги будуть однаковими (нехтуємо власним опором нульового проводу).
Отже, нульовий провід, по-перше, дає змогу діставати крім лінійної напруги ще й фазну, а по-друге, перерозподіляє фазні напруги, підтримуючи їх однаковими незалежно від навантаження. Це є однією з причин того, що в нульовому проводі не ставлять запобіжників.
3. З’ЄДНАННЯ ТРИФАЗНОЇ СИСТЕМИ ТРИКУТНИКОМ
При сполученні трифазної системи трикутником як обмотки генератора, так і споживачі сполучають послідовно, утворюючи замкнені трикутники фаз генератора і споживачів (рис. 2—12).
C
і
В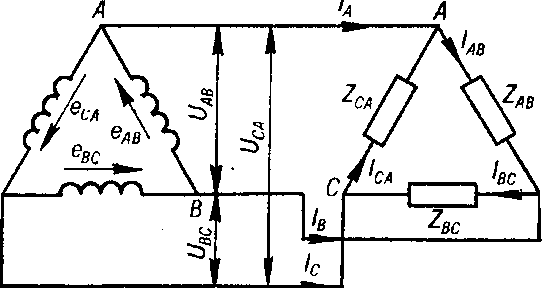
Рис. 2—12. З’єднання трифазної системи трикутником.
У замкненому контурі генератора діятимуть е. р. с. кожної фази, сума миттєвих значень яких дорівнює нулю, оскільки вони рівні за величиною і зсунуті за фазою на 120° (рис. 2—13).
£
Рис.
2—13.
Векторна
діаграма діючих значень е. р.
с. при
з’єднанні обмоток генератора трикутником.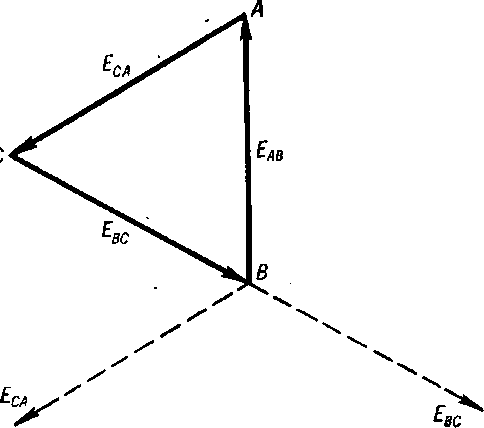


Ua = U4,. (2-5)
ЛІНІЙНІ струми І А, І В, Ic He дорівнюють фазним іав, івс, Ica-
За першим законом Кірхгофа алгебраїчна сума миттєвих значень струмів для кожної з вершин А, В і C трикутника споживачів дорівнюватиме нулю: іА + іСА — іАВ = 0» звідки лінійний струм дорівнює різниці двох суміжних фазних струмів:
"CA’

-вс
ABy
(2-7)
Рис.
2—14.
Векторна
діаграма напруг і струмів для
активного рівномірного навантаження
фаз при з’єднанні трифазної системи
трикутником.

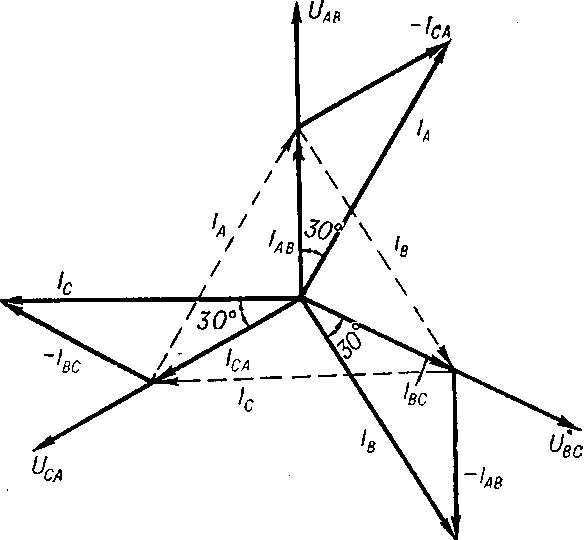
I A = IAB — ІСА', Ib= Ibc — І ав', Ic = Ica — І вс·
Геометрична сума всіх векторів лінійних струмів також дорівнює нулю. Векторну діаграму напруг і струмів для активного рівномірного навантаження фаз при сполученні трифазної системи трикутником зображено на рис. 2—14.
Як видно з рис. 2—14,
вектори фазних струмів збігаються за фазою з відповідними напругами, однакові за величиною і зсунуті під кутом 120°. Вектори лінійних струмів I a, Ib і Ic відстають за фазою від фазних струмів на кут 30°. Якщо лінійні струми перенести паралельно самим собі так, щоб вони сполучали кінці векторів фазних струмів, то дістанемо топографічну діаграму струмів (на рис. 2—14 показано пунктиром), подібну до топографічної діаграми напруг при сполученні зіркою.
З векторної діаграми (рис.’2—14) легко дістати співвідношення між лінійними і фазними струмами: ~ Ia = 7^Bcos30°, звідки Ia = Yb і ав, або Іл = ]/3 Іф-
дістати з формули для
Це
саме співвідношення багатофазної
системи: Ia
= 2L
можна
π

нерівномірному навантаженні фаз, коли Zab Ф Zbc Ф Zca, фазні струми будуть неоднаковими. Лінійні струми також будуть різні і визначаються різницею суміжних фазних струмів. Векторну діаграму для нерівномірного активного і активно-індуктивного навантажень фаз зображено на рис. 2—15, а і б.
Як видно з рис. 2—15, при нерівномірному навантаженні фаз струми неоднакові; це створює «перекіс фаз», що призводить до ненормальної роботи генератора.
Рис.
2—15.
Векторні
діаграми нерівномірного навантаження
фаз при з’єднанні трифазної системи
трикутником:
а
—■ нерівномірне активне навантаження;
б
—
нерівномірне активно-індуктивне
навантаження.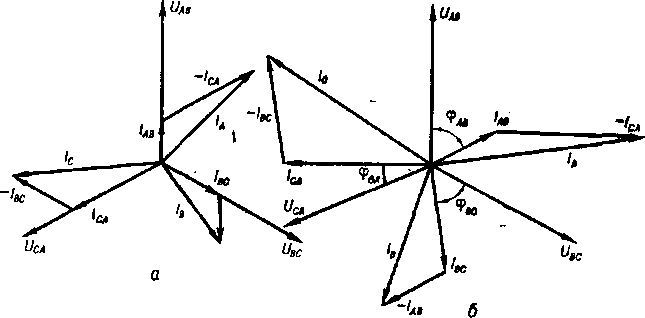
Тому в практиці сполучення споживачів трикутником застосовують здебільшого для симетричного навантаження (трифазні двигуни тощо). При наявності «перекосу фаз» його вирівнюють, перерозподіляючи навантаження між фазами.
Струми у фазах і кути зсуву фаз при сполученні трифазної системи трикутником можна описати такими рівняннями:
U
X
AB
AB
,
'-AB
’
IAB
lAB
(2-8)



AB
rAB
AB
Для інших фаз співвідношення знаходимо аналогічно. Лінійні струми знаходимо з рівнянь (2—7).
Порівнюючи сполучення обмоток генератора трикутником із сполученням зіркою, можна побачити, що в двох генераторів з однаковими лінійними напругами легше' ізолювати фазні обмотки при сполученні їх зіркою, тому що на фазу припадає в раз менша напруга, ніж при сполученні обмоток трикутником. Тому на практиці частіше застосовують сполучення обмоток генератора зіркою.
Нагадаємо, що потужність для однофазного змінного струму дорівнює добутку струму, напруги і коефіцієнта потужності:
Рф = ΙΙφΙφΖ os?.
Потужність трифазної системи складається з суми трьох фазних потужностей: P = РфА -І- Рфв + РФс-
Для симетричної системи напруг і струмів активну, реактивну і повну потужність дістанемо з рівнянь:
P = 3ІІфІф cos ψ, j
Q = 3ифІф sin γ, > (2—9)
s =,3ифіф = ур* + о\ J
де і/ф і Іф — діючі значення фазних напруг і струмів;
φ —кут зсуву між фазною напругою і фазним струмом.
Потужність трифазної системи можна подати через лінійні значення напруг і струмів, якщо врахувати, що при сполученні
и,
зіркою ϋφ = -JZZ; Іф — І/, а при сполученні трикутником ϋφ — V з
Ua- Іф = . Тоді
P = YbUJjt cos ср,
(2-Ю)
S = Vb UJm
де Ua і іл — діючі значення лінійних напруг і струмів.
Таким чином, незалежно від способу сполучення (зірка чи трикутник) вирази для потужностей залишаються тими самими. Зауважимо, що хоч потужності при сполученні зіркою і трикутником і рівні, проте при сполученні того самого споживача спочатку зіркою, а потім трикутником споживана потужність збільшиться в три рази, тому що /лД = 3/Л/Дч. Для m-фазної симетричної системи вирази для потужностей аналогічні:
P = тифІф cos φ; \
Q = тЦфІф sin φ; | (2—11)
S = тифІф. і
Слід зазначити, що в симетричній трифазній системі сума миттєвих значень потужностей фаз не змінюється з часом (тобто немає
пульсації потужності середнього значення, як у випадку однофазного змінного струму), а залишається сталою. Дійсно, якщо додамо миттєві значення потужностей (див. 1—58) кожної фази, то сума пульсуючих складових потужностей дорівнюватиме нулю, оскільки в них амплітуди рівні і зсунуті під кутом 120° одна відносно одної.
Таким чином, при додаванні потужностей трьох фаз залишається лише сума трьох рівних між собою сталих складових:
P = Pa + Pb + Pc = ЗУфІф cos ψφ = ]/3 UJjl cosfj,. (2—12)
Система, потужність якої не змінюється з часом, називається зрівноваженою системою, на відміну від незрівнова- ж е н о ї, потужність якої змінюється з часом.
Окремий випадок зрівноваженої системи є симетрична трифазна система.
5. ОБЕРТОВЕ МАГНІТНЕ ПОЛЕ ТРИФАЗНОГО СТРУМУ
Однією з великих переваг трифазного змінного струму є можливість створення обертового поля, яке широко використовується в двигунах змінного струму і деяких вимірювальних приладах.
Обертове магнітне поле створюється трифазним змінним струмом, який проходить через три однакові котушки (рис. 2—16, а), розміщені під кутом 120° одна відносно одної.
 Симетрична
система трифазного струму (рис. 2—16,
б):
Симетрична
система трифазного струму (рис. 2—16,
б):
(2-13)
ФА
=
Фт
sin
Ш, 
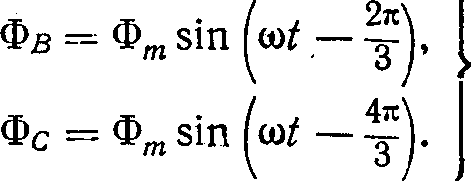
(2-14)
Вектори магнітних потоків збігаються з осями котушок, їх напрями визначають за правилом свердлика (рис. 2—16, а). Напрям потоків при кожній зміні струму в котушках змінюватиметься на протилежний, але просторове положення осей потоків залишатиметься незмінним.
![]()
Фрез = 2Фа-^-совЗО°=1,5Фщ в
Рис. 2—16. Схема одержання обертового магнітного поля трифазного
струму.
Якщо візьмемо напрям струму в котушках від початків до їх кінців, то, розглядаючи струми в різні моменти часу (tx, t2, і т. д.), дістанемо результуюче магнітне поле, яке обертається. Наприклад, для моменту часу ty в котушці А — X струм має додатне значення, у котушці В — Y струм має від’ємне значення, а в котушці C — Z його зовсім не буде, а тому на початку котушки А струм напрямлений від глядача (0), а на початку котушки В — на глядача (О). У позначених на хвильовій діаграмі точках вели-
Yl
чини струмів дорівнюють або нулю, або Іт~ ■ Магнітні потоки, які
виникають у котушках, пропорційні струмам; після геометричного їх додавання утворюється результуючий потік Фрез, сталий за величиною (в будь-який момент часу), що дорівнює 1,5 Фт і обертається в просторі з рівномірною кутовою швидкістю в напрямі чергування струмів за фазами. Якщо побудувати результуючий потік для всіх точок (рис. 2—16 б, в), то помітно, що за період він зробить один повний оберт у напрямі руху годинникової стрілки.
Якщо перемкнути дві довільні котушки, наприклад А і В, то чергування струмів у котушках зміниться, тому напрям обертання магнітного поля зміниться на зворотний.
Взагалі число обертів магнітного поля зв’язане з частотою і числом пар полюсів поля таким співвідношенням:
де η — число обертів магнітного поля за хвилину; / — частота струму; р — число пар полюсів поля.
При наявності трьох котушок, коли на фазу припадає одна котушка, обертове магнітне поле має тільки два полюси (на рис. 2—16, в зображено пунктиром); тоді число обертів поля при f = 50 гц дорівнюватиме 3000 об/хв. Якщо взяти шість котушок, щоб на фазу припадало по дві котушки, і відповідно розмістити їх у просторі, то обертове поле матиме чотири полюси, а швидкість його обертання в два рази зменшиться і дорівнюватиме 1500 об/хв і т. д.
ОСНОВИ ЕЛЕКТРОВИМІРЮВАЛЬНО! ТЕХНІКИ
3—1. ЗАГАЛЬНІ ВІДОМОСТІ
Під електричними вимірювання- м и розуміють галузь електротехніки, яка займається вимірюванням електричних величин: струму, напруги, потужності, опору, частоти, кута зсуву фаз та ін. За допомогою електричних приладів можна вимірювати також неелектричні величини: механічні, теплові, світлові, хімічні і багато інших. Електровимірювальна техніка дає можливість робити дистанційні і нестійкі вимірювання з одночасним записуванням їх на плівці або діаграмі з високим ступенем точності.
Застосування електричних вимірювань дає змогу успішно розв’язувати багато важливих питань. Так, сучасні методи розвідки нафти і рудних родовищ цілком грунтуються на техніці електричних і особливо магнітних вимірювань.
При всіх вимірюваннях слід користуватися певною системою одиниць і відповідними вимірювальними приладами.
У Радянському Союзі прийнято міжнародну систему Cl, складовою частиною якої є система електричних і магнітних одиниць, затверджена ГОСТом 9867-61 і введена з 1 січня 1963 р.
Усі міри і електровимірювальні прилади поділяють на робочі і зразкові. Перші застосовують для технічних і лабораторних вимірювань; другі, особливо точні,— для перевірки робочих мір і приладів. Еталонами називають зразкові міри, виготовлені з так званою метрологічною точністю, тобто з найвищою точністю, яка доступна при сучасному рівні розвитку науки і техніки.
Наука, яка займається вивченням одиниць еталонів, дослідами вимірювань і впровадженням їх у практику, називається метрологією. Еталони і зразкові міри відображають одиниці основних електричних величин опору, струму, е. р. с., індуктивності та ін.
Електровимірювальні прилади поділяють на дві великі групи — прилади безпосередньої оцінки і прилади порівняння.
Приладами безпосередньої оцінки, або показуючими, називають прилади, які забезпечують можливість відлічувати ту або іншу вимірювану величину безпосередньо на шкалі приладу. До цієї групи належать стрілочні прилади: амперметри, вольтметри, герцметри, лічильники та ін.
До групи приладів порівняння належать різноманітні мости і компенсаційні вимірювальні установки.
Загальні технічні умови та електровимірювальні прилади, а також правила їх експлуатації регламентовані положеннями, установленими Комітетом стандартів мір і вимірювальних приладів при Раді Міністрів СРСР. Залежно від того, які з електричних явищ покладено в основу принципу дії приладів з безпосередньою оцінкою, вони поділяються на системи, умовне позначення яких подано втабл. З—1. Відповідно до цьдго електровимірювальні прилади безпосередньої оцінки поділяють на чотири групи:
Електромеханічні прилади, в яких енергія електромагнітного поля безпосередньо використовується для переміщення його рухомої частини. До цієї групи належить більшість електровимірювальних приладів.
Електротеплові прилади, в яких електромагнітна енергія через дію теплових процесів використовується для переміщення його рухомої частини.
Електрохімічні прилади, в яких електромагнітна енергія системи через дію хімічних процесів використовується для вимірювання електричних величин.
Електронно-променеві прилади, в яких електромагнітна енергія використовується для керування електронними променями в електронних трубках.
За характером застосування електровимірювальні прилади поділяють на стаціонарні і переносні. Стаціонарні прилади призначені для встановлення на щитах і панелях електротехнічних пристроїв, розподільних підстанцій та ін., переносні — для контрольних вимірювань і лабораторної практики.
За умовами експлуатації прилади поділяють на такі групи: А — для роботи в закритих, сухих, опалюваних приміщеннях; Б — для роботи в неопалюваних приміщеннях; В — для роботи в польових або морських умовах.
Похибки електричних вимірювань. Під час вимірювань внаслідок ряду причин дослідне числове значення вимірюваної величини є лише більш або менш наближеним. Кінцевий результат вимірювання будь-яких електричних величин, добутий за допомогою навіть найдосконаліших приладів, завжди відрізнятиметься від дійсного значення вимірюваної величини. Різниця між дійсним значенням вимірюваної величини і її дослідним значенням виникає
Умовні позначення приладів
Системе,
приладів
З
протидіючою механічною силою
Без
протидіючої сили (типу логометра)
Основне
призначення системи


Магнітоелектрич-
Q
Q
Електромагнітна
Електродинамічна
(без сталі)
Електродинамічна
із сталлю (феродинамічна)
G
Y
J.
T
Cl
Додаткові
позначення
Індукційна
Теплова
Електростатична
Вібраційна
Частотоміри
Електронна
(з магнітоелектрич- ним вимірювальним
приладом)
Вольтметри
і герцметри в колах підвищеної і високої
частоти
Гальванометри,
міліамперметри, амперметри,
мілівольтметри, вольтметри, мегометри,
вібратори до осцилографів.
Щитові
амперметри і вольтметри, фазометри,
частотоміри; переносні амперметри,
вольтметри.
Міліамперметри
і мілівольтметри змінного струму.
Амперметри, вольтметри, фазометри
лабораторні. Лічильники електричної
енергії в колах постійного струму.
Ватметри
змінного струму та реєструючі
(самопишучі) амперметри і ватметри
змінного стру- му.
Л
ічильники електричної енергії в
колах однофазного і трифазного
струму, щитові Ватметри.
Амперметри,
вольтметри
Вольтметри
і кіловольтметри постійного і змінного
струму




![]()

![]()
![]()




*
![]() Напівпровідниковий
випрямляч
Напівпровідниковий
випрямляч
Термоелектричний перетворювач
Електронний перетворювач
Позначення маркірувальних знаків |
. Умовні позначення маркірувальних знаків |
Постійний струм |
— |
Однофазний змінний струм |
|
Трифазний змінний струм |
% ЗО, |
Постійний і змінний струм |
|
Одиниці вимірювань: ампер, вольт, ват, герц, коефіцієнт потужності, ом |
A1V1 W, Hz, cos φ, β |
Клас точності приладу ' |
0,05; 0,1; 0,2; 0,5 1,0; 1,5; 2,5:4,0 |
Прилад працює при частоті |
50 ги |
Ізоляція приладу, випробувана під напругою, наприклад 2 кв |
або 2KV |
Прилад не підлягає випробовуванню ізоляції · |
І |
Придад працює нормально; у вертикальному положенні; під кутом до горизонту, наприклад 60°, у горизонтальному положенні. |
J. ; ; χ_„ · |
- ■ , . V,... ,·. ■„ . :■ |
|
Ступінь захисту приладу від впливу зовнішніх полів: а) магнітних; б) електричних. Для І категорії додаткова похибка не повинна перевищувати 0,5%, для II — 1%, для III —2,5%. |
' Г-ι і 1 г—і , Ч ' і 5 "\ L I L—,J !—-J ; |
внаслідок недосконалості апаратури, недостатнього знання всіх обставин, пов’язаних з процесом вимірювання, несталості умов спостережень, недостатнього досвіду експериментатора.
Точність вимірювання характеризується абсолютною похибкою АХ, яка дорівнює алгебраїчній різниці між дослідним значенням будь-якої величини Хвим і її дійсним значенням Xd-
A Х^Хвим-Хд. (3-1)
У техніці за дійсне значення вимірюваної величини вважають таке, яке визначається зразковими вимірювальними приладами або зразковими мірами.
Величина, протилежна за знаком абсолютній похибці, має назву поправки:
k = -АХ = Хд-Хвим. (3-2)
Звідси Дійсне значення вимірюваної величини:
Xd ~ Хвим + ft· (З—3)
Щоб оцінити точність виконаного вимірювання на якійсь поділці шкали приладу, користуються відносною похибкою вимірювання, під якою розуміють відношення абсолютної похибки AX вимірюваної величини до її дійсного значення Xq, подане в процентах:
γ* = ψ -100%. (3-4)
лд
Для оцінки похибки приладу по всій шкалі введено поняття основної зведеної похибки, яка являє собою відношецня найбільшого значення абсолютної похибки до номінального значення Хн, на яке розрахований прилад:
Ти = ^ · 100% = Хеим~—д ■ 100%. (3-5)
лн Лн
Найбільша основна зведена похибка прийнята для класифікації приладів за класом їх точності. Якщо, наприклад, прилад Має клйс точності 1,0, то це означає, що його найбільша основна зведена похибка не перевищує ±1,0%.
Чутливістю приладу називають відношення приросту кутового Aa або лінійного Al переміщення показника приладу в градусах, міліметрах або просто в поділках шкали до відповідного приросту вимірюваної величини. Наприклад, чутливість амперметра визначають:
Λ а
S —— [поділка/ампер]. (3—6)
• Δ/
Обернену величину називають сталою приладу, або ціною поділки, наприклад амперметра:
C= -і = ^ [ампер/поділка]. (3—7)
Стала, або ціна поділки приладу — це величина, на яку треба помножити відлік по шкалі в поділках, щоб дістати вимірювану величину.
Заводи, що виготовляють електровимірювальні прилади, гарантують найвищу зведену відносну похибку приладу в межах робочої частини його шкали, яка не перевищує значення, що називається допустимою похибкою. За величиною цієї похибки всі прилади поділяються на такі класи точності:
Клас точності |
0,05 |
0,1 |
0,2 |
0,5 |
1,0 |
1,5 |
2,5 |
4,0 |
Th % |
±0,05 |
±0,1 |
±0,2 |
±0,5 |
±1,0 |
±1,5 |
±2,5 |
±4,0 |
На шкалі приладу клас точності позначають цифрою.
Загальносоюзний стандарт установлює дві категорії похибки вимірювальних приладів; основні і додаткові.
Основна похибка приладу — це похибка, яку має прилад при нормальних умовах його експлуатації. Вона є наслідком ряду похибок, які можна поділити на: а) похибки, що залежать від електричних, і магнітних властивостей приладу (наприклад, похибка від залишкової індукції в середовищах електромагнітних приладів); б) похибки, зумовлені механічними властивостями приладу (його технічним виконанням і станом), а саме: від тертя, від неправильного виконання і розміщення шкали, від поганого регулювання, від деформації пружин з часом.
Додаткова похибка приладу — це похибка, зумовлена різними зовнішніми умовами (магнітне та електричне поле, температура, частота, несинусоїдальність вимірюваної величини тощо).
3—2. ПРИЛАДИ МАГНІТОЕЛЕКТРИЧНОЇ СИСТЕМИ
На рис. 3—1 подано конструктивну схему приладу магнітоелектричної системи з рухомою котушкою. Магнітне поле створюється потужним постійним підковоподібним магнітом 1, виготовленим з кобальтової, вольфрамової або нікель-алюмінієвої сталі. До кінців магніту прикріплюють полюсні наконечники 2 з м’якої сталі, які
мають циліндричні виточки. Між полюсними наконечниками неру-; хомо закріплений стальний циліндр 6, який створює рівномірний повітряний проміжок і зменшує опір магнітного кола. У вузькому кільцеподібному повітряному проміжку створюється рівномірне магнітне поле з радіально розташованими магнітними силовими лініями.
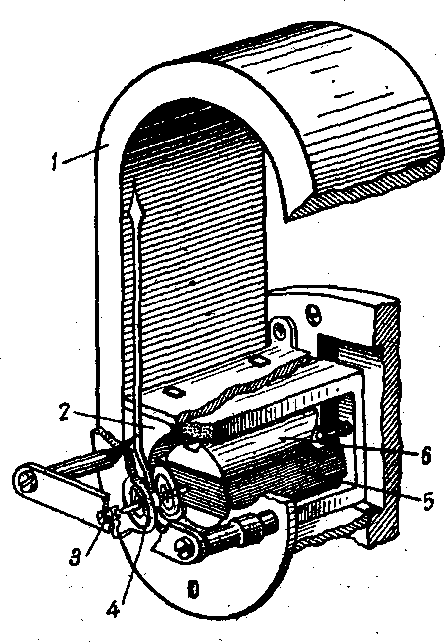 У
повітряному зазорі вільно обертається
на підшипниках, закріплених на двох
ізольованих одна від одної півосях,
легка алюмінієва рамочка, на якій
намотана обмотка (котушка) з тонкого
ізольованого дроту; кінці ЇЇ припаяні
до двох спіральних пружин, ізольованих
одна від одної. Протидіючий момент
створюється цими двома спіральними
пружинами, по яких підводиться струм
до обмотки приладу. Коли струму в
обмотці рамки немає, уся система перебуває
в рівновазі; але якщо по витках обмотки
пропустити струм, то внаслідок взаємодії
струму в обмотці з магнітним полем
підковоподібного магніту створюється
пара сил (напрям дії сил можна знайти,
користуючись правилом лівої руки),
яка повертає рамку, а разом з нею і
стрілку приладу. Величина сили
визначається за формулою: F
= BIwl.
У
повітряному зазорі вільно обертається
на підшипниках, закріплених на двох
ізольованих одна від одної півосях,
легка алюмінієва рамочка, на якій
намотана обмотка (котушка) з тонкого
ізольованого дроту; кінці ЇЇ припаяні
до двох спіральних пружин, ізольованих
одна від одної. Протидіючий момент
створюється цими двома спіральними
пружинами, по яких підводиться струм
до обмотки приладу. Коли струму в
обмотці рамки немає, уся система перебуває
в рівновазі; але якщо по витках обмотки
пропустити струм, то внаслідок взаємодії
струму в обмотці з магнітним полем
підковоподібного магніту створюється
пара сил (напрям дії сил можна знайти,
користуючись правилом лівої руки),
яка повертає рамку, а разом з нею і
стрілку приладу. Величина сили
визначається за формулою: F
= BIwl.
Обертальний момент, що діє на рухому котушку і буде
' .Л, . · Рис. З—1..Прилад магнітоелектрнч-
M06 = 2FR = 21 BlwR = IBSw, ної системи.
де R — відстань від осі до активної сторони котушки; 5 — площа котушки.
Отже, обертальний момент М0б у магнітоелектричному приладі пропорціональний струму І, що проходить по котушці, і магнітній індукції в повітряному зазорі; але В = Const, тоді М0в = -Cl- I, де Cl — коефіцієнт пропорційності, що залежить від конструктивних особливостей котушки (розміру, числа витків) і вибраної системи одиниць.
Під впливом цього обертального моменту рухома частина приладу повертатиметься, спіральні пружини створюватимуть протидіючий момент Mnp, який завжди буде пропорційний куту закручування а.
Протидіючий момент Mnp = C2 ■ а, де C2 — коефіцієнт пропорційності, що залежить -від пружних властивостей пружини.
Рухома частина приладу повертатиметься доти, поки протидіючий момент Mnp не дорівнюватиме обертальному моменту: М0б — Mnp,
або C1I = сга, звідси / = — а або І = с ■ а, де с = ~ .
cI cI
3: цього рівняння видно, що кут повороту рухомої частини прямо пропорційний Величині с,труму в котушці. Завдяки цьому шкала •електромагнітного приладу рівномірна.
Зміна напряму постійного струму в котушці змінює напрям сили-F, і котушка повертатиметься в протилежну сторону. Через те магнітоелектричні прилади є полярними і для безпомилкового вмикання у вимірювальне коло один з його затискачів позначають знаком плюс.
Ця група приладів не має спеціальних заспокоювачів, їх призначення виконує алюмінієва рамка. Якщо рамка рухається в сильному магнітному полі приладу, у ній індукується е. р. с. і виникає струм. Взаємодія цього струму з магнітним полем створює гальмі в-, ний момент, який забезпечує швидке заспокоювання рухомої частини приладу.
Магнітоелектричні вимірювальні прилади на практиці мають широке і різноманітне застосування якнайточніші і найчутливіші з усіх наявних приладів безпосереднього віДліку. Вони можуть бути використані як амперметри, вольтметри, міліамперметри, мілівольтметри в колах постійного струму, а також для вимірювань електричного опору і різноманітних неелектричних величин (температури, тиску, швидкості обертання та ін.).,
Прилади магнітоелектричної системи виготовляють високого класу точності і чутливості як лабораторні багатограничні прилади і контрольні (класу точності 0,2—0,5), так і технічні (класу 1—1,5), що вигідно відрізняє їх від інших приладів.
Покази приладів практично не залежать від впливу зовнішніх магнітних полів, бо ці прилади мають сильне власне поле.
Для вимірювання малих значень заряду, струму і напруги застосовують ґ а льва н о м е т р й. Принцип дії і будова магнітоелектричних гальванометрів майже нічим не відрізняється від інших приладів цієї системи. Гальванометрами безпосередньо вимірюють струми від 10"» до 10-1¾.
До недоліків приладів цієї системи слід віднести велику чутлис вість до перевантажень, відносно складну конструкцію і порівняно високу вартість.
Прилади магнітоелектричної системи використовують у колах постійного і змінного струму. В останньому випадку до приладів додають напівпровідникові випрямлячі або термоелектричні пере; творювачі змінного струму в постійний, які розміщують в одному корпусі з вимірювальним механізмом приладу. Залежно від застосування перетворюючих пристроїв прилади поділяють на детекторні
і термоелектричні.
Термоелектричні прилади застосовують головним чином як амперметри для вимірювання змінних струмів високої частоти (від
кгц До 60 мгц).
Вимірюваний струм нагріває одну або кілька термопар. Термоелектрорушійна сила термопар, яка виникає при цьому, пропорційна квадрату вимірюваного струму, тому шкала термоелектричного приладу нерівномірна — квадратична.
У детекторних приладах випрямляльним елементом є мідноза- кисні або кристалічні (германієві, кремнієві) вентилі.
Випрямляч перетворює визначений змінний струм у-пульсуючий, а останній вимірюється магнітоелектричним вимірювачем. Випрям- ляльні прилади виготовляють з одно- і двопівперіодним випрямленням. Коли застосовується однопівперіодна схема, прилад дає відхилення, пропорційне половині середнього значення вимірюваного змінного струму, а при двопівперіодній — середнє значення..
Детекторні прилади найбільше застосовують як вольтамперметри для вимірювання в колах змінного і постійного струму. Наприклад, універсальний переносний вольт-амперметр типу Ц-315 застосовується для вимірювання напруги і струму в колах постійного і змінного струму частотою від 45 до 1000 гц, а також для вимірювання омічного опору постійного струму з безпосереднім відліком на Шкалі. Недоліки цих: приладів є порівняно невисокі точність (клас 1,0—1,5) та чутливість до змін температури і частоти.
3-3. ПРИЛАДИ ЕЛЕКТРОМАГНІТНОЇ СИСТЕМИ
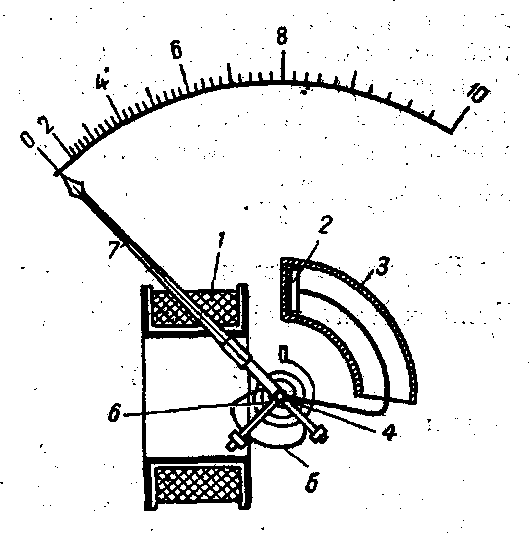 Принцип
дії приладів електромагнітної системи
грунтується :
на взаємодії між струмом котушки і
магнітним полем рухомого сердечника з
феромагнітного матеріалу.
Принцип
дії приладів електромагнітної системи
грунтується :
на взаємодії між струмом котушки і
магнітним полем рухомого сердечника з
феромагнітного матеріалу.
Основною частиною такого приладу (рис. З—2) є котушка /, кількість витків і діаметр проводу якої беруть залежно від величини струму, на який розраховано прилад: чим більший струм, тим менше витків і більший переріз. Перед отвором ці'еї котушки на осі 4, яка вертається в підшипниках, розташована овальна · пластинка (сердечник 5 з м’якого заліза), закріплена ексцентрично на;осі.
До осі прикріплені стрілка 7, пружина 6 (інколи заміняють системою тягарців) І поршень 2 рис_ З—2. Прилад електромагнітної повітряного заспокоювача. Коли ‘ системи. '
повертається вісь, поршень заспокоювача рухається в металевому циліндрі 3. Поршень, рухаючись у циліндрі, зустрічає значний опір повітря, через що рухома система приладу швидко ’ заспокоюється.
При вмиканні приладу в коло струм у котушці створює магнітне поле, яке намагнічує сердечник 5. Намагнічений сердечник втягується в отвір котушки, що примушує вісь, до якої прикріплена стрілка, повертатися. Сила втягування сердечника визначається взаємодією магнітного поля котушки з полем намагніченого сердечника. Інтенсивність магнітного поля котушки і сердечника приблизно можна вважати пропорційними струму в котушці. Тому сила втягування сердечника в котушку буде пропорційна квадрату вимірюваного струму: F0б = C1 /2.
Отже, і величина обертального моменту також буде пропорційна квадрату струму: M0S = C1 /2, де C1 — коефіцієнт, який залежить від матеріалу і форми сердечника, а також від його положення відносно нерухомої котушки. Протидіючий момент спіральної пружини пропорційний куту повороту рухомої частини приладу: Mnp = с2 · а.
Увімкнемо прилад електромагнітної системи в коло постійного струму /„; тоді на рухому частину приладу діятиме незмінний за часом обертальний момент Aio6 = C1 її.
Протидіючий момент буде пропорційний куту повороту стрілки: Mnp = C2а. Сердечник приладу повертатиметься доти, поки протидіючий момент не дорівнюватиме обертальному: Мов = Mnp
або C1 · /* = C2а, звідки а = і\^ с ■ Ii0.
Тепер увімкнемо цей прилад у коло змінного струму. У цьому разі на рухому частину вимірювального механізму діятиме змінний за часом обертальний момент. Миттєве значення цього моменту пропорційне квадрату миттєвого значення струму в котушці: Mo6 = kx ■ і*. Відомо, що середнє значення обертального моменту дорівнює половині його максимального миттєвого зна-
M ■
чення Mcp — .
/*
Беручи до уваги, що Mm = C1 ■ Im, дістанемо Aicp = C1 Коли обертальний і протидіючий моменти рівні, можна записати:
-I2
Aifp ~ AiпР або C1 —JJ-* — С2&»
звідки
Переходячи від амплітудного до діючого значення змінного струму, дістанемо: а = сР.
Квадратична залежність кута повороту стрілки а від струму І дає змогу вмикати ці прилади в кола і постійного і змінного струму, тому що напрям струму не впливає на напрям обертального моменту. У колах змінного струму вони вимірюють діюче значення струму або напруги. Обертальний момент залежить від квадрату струму, тому шкала електромагнітного приладу нерівномірна.
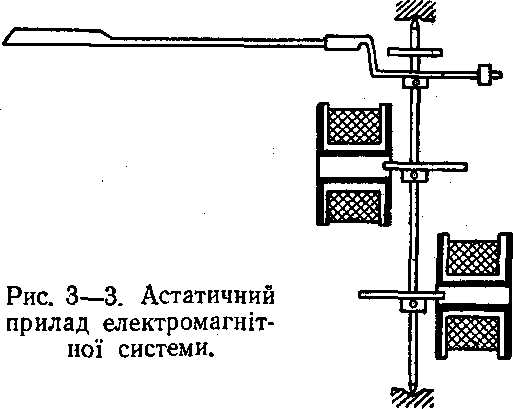 Магнітне
поле котушок електромагнітних приладів
відносно слабке, тому що лінії магнітного
поля в значній своїй частині проходять
через повітря, а магніторушійна сила
(м. р. с.) котушки, невелика. Тому прилади
чутливі до впливу зовнішніх магнітних
полів. Щоб захистити від цих явищ
електромагнітні прилади, їх
виготовляють астатичними
або
захищають стальними екранами. В астатичних
приладах (рис. 3—3)
на
спільній осі закріплені два сердечники,
які містяться біля отворів двох плоских
котушок. Обмотки котушок вмикають
так, щоб напрями їх магнітних полів були
протилежні. Обертальні моменти від обох
Котушок діють на рухому систему приладу
в одному напрямі. Котушки повернуті на
180°
одна
відносно одної і сполучені послідовно.
Тоді зовнішнє магнітне поле збільшуватиме
поле і обертальний момент однієї котушки
і зменшуватиме поле та обертальний
момент другої. Сумарне обертальне
зусилля залишиться незмінним.
Магнітне
поле котушок електромагнітних приладів
відносно слабке, тому що лінії магнітного
поля в значній своїй частині проходять
через повітря, а магніторушійна сила
(м. р. с.) котушки, невелика. Тому прилади
чутливі до впливу зовнішніх магнітних
полів. Щоб захистити від цих явищ
електромагнітні прилади, їх
виготовляють астатичними
або
захищають стальними екранами. В астатичних
приладах (рис. 3—3)
на
спільній осі закріплені два сердечники,
які містяться біля отворів двох плоских
котушок. Обмотки котушок вмикають
так, щоб напрями їх магнітних полів були
протилежні. Обертальні моменти від обох
Котушок діють на рухому систему приладу
в одному напрямі. Котушки повернуті на
180°
одна
відносно одної і сполучені послідовно.
Тоді зовнішнє магнітне поле збільшуватиме
поле і обертальний момент однієї котушки
і зменшуватиме поле та обертальний
момент другої. Сумарне обертальне
зусилля залишиться незмінним.
Проста конструкція приладу, невелика вартість, спроможність витримувати перевантаження призвели до того, що прилади електромагнітної системи широко застосовуються для технічних вимірювань. Точність приладів цієї системи нижча від точності приладів магнітоелектричної системи, проте є достатньою для технічних вимірювань змінного і постійного струму.
3-4, ПРИЛАДИ ЕЛЕКТРОДИНАМІЧНОЇ СИСТЕМИ
На рис. 3—4 зображено механізм приладу електродинамічної системи, який складається з двох нерухомих котушок 1, сполучених послідовно, рухомої котушки 2, двох спіральних пружин 3 і повітряного заспокоювача 4. Прилади цієї системи застосовують як амперметри, вольтметри, фазометри, а також як само пишучі прилади для вимірювання в колах постійного і змінного струму. Котушки можуть бути (залежно від призначення приладу) сполучені послідовно або паралельно.
Величина магнітного поля кожної котушки залежить від струму, який Проходить по них, тому обертальний момент приладу пропорційний добутку струмів у котушках: M0б = Cl1 ■ I2.
Рис.
3—4.
Прилад
електродинамічної си стеми.
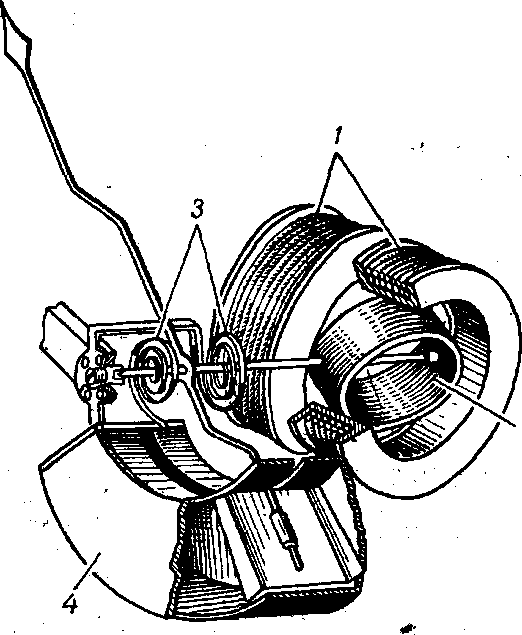
паралельно, по них протікатимуть різні за величиною струми I1 Ф 12. Між полем струму 12 рухомої котушки і полем струму I1 нерухомої котушки виникає сила електромагнітної взаємодії.
Струм у нерухомій ї рухомій котушках є часткою загального струму / вимірю-
ваного кола, тобто: I1 = сн ■ І, Ii=Cp'-І, тому Mo6- = CllIi = с ■ сн · CpI2 = с'І2.
Отже, обертальний момент (а значить, і кут повороту рухомої котушки) пропорційний квадрату струму, який протікає через прилад, і шкала приладу буде нерівномірною.
При послідовному вмиканні котушок струми в них будуть однакові: /,=Z2 = І.
Отже, обертальний момент М0в = с ■ I2.
Коли напрям струму змінювати в обох котушках одночасно, напрям обертального моменту залишиться попереднім. Отже, прилад придатний ‘для вимірювання в колах постійного і змінного струму.
Якщо нерухому котушку ввімкнути послідовно з навантаженням,. а рухому котушку разом з додатковим опором Re паралельно, то по котушках протікатимуть струми, миттєві значення яких е (рис. 3—5, 3—6): ' ■ '
h= І ті · sinatf, t2 =χ Imt · sin (ωί — φ).
Через те що рухома котушка має значний момент інерції, то її відхилення визначатиметься не миттєвим значенням моменту, а його середнім значенням за період:
T ■
M = у J1 ml Sin ωί · lm% sin (ωί — φ) dt ~ · Intt Imt [cos φ χ
Λ
I . і
X
г
■
cos ψ,
I
jsir
T
Ύ
_2l
VrS
Через
те що I
sin3
Ы
■
dt
sin
(at
■
cos (at
■ dt
= 0, a



=
Zi-Z4
Якщо
знехтувати індуктивним опором
паралельної обмотки (для цього підбирають
великого значення активний додатковий
опір
Ra),
то
можна записати: It=
U
Підставивши
замість' I2
/2
Rt
+ Ra
його
значення
позначивши




і
С, дістанемо: P = CI U- cosy.
Rt + Ra
Рис.
3—5.
Схема
приладу електродинамічної системи.
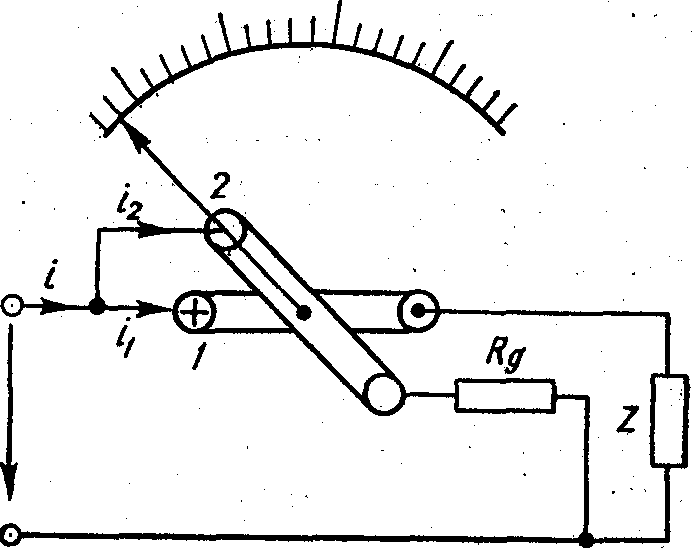
Обертальний момент пропорційний добутку струмів на' косинус кута зсуву фаз між ними: М0б = C1Ii Ia cos φ.
Протидіючий момент в електродинамічних приладах створюється за допомогою пружин і пропорційний куту U їх закручування, тобто куту відхилення рухомої котушки від нульового положення:
^2 '
або
C1I1
I2
cos
φ
—
с<&,
Кут відхилення рухомої системи пропорційний добутку струмів у котушках і косинусу кута зсуву фаз між ними. Коли струми в котушках однакові (послідовне ввімкнення) I1 = I2 = I, кут відхилення дорівнюватиме: а = C2 J2 ■ cos φ, де Ci — стала приладу і залежить від форми котушок, їх взаємного розміщення і пружності спіральних пружин.
Підбираючи форму котушок і їх взаємне розміщення, можна дістати відносно рівномірну шкалу, починаючи з 25—30% від номінального значення вимірюваної величини.
За точністю і чутливістю електродинамічні Прилади кращі від приладів інших систём, які застосовуються для вимірювань в колах
змінного струму. На покази приладів цієї системи великий вплив має зовнішнє магнітне поле, бо власне магнітне поле котушок слабке. Щоб уникнути впливу зовнішніх магнітних полів на точність вимірювань, вживають таких заходів: вимірювальний механізм розміщують усередині стального екрана, використовують астатичний вимірювальний механізм з двома парами котушок і т. д.
Рис.
3—6.
Миттєві
значення струмів у котушках.
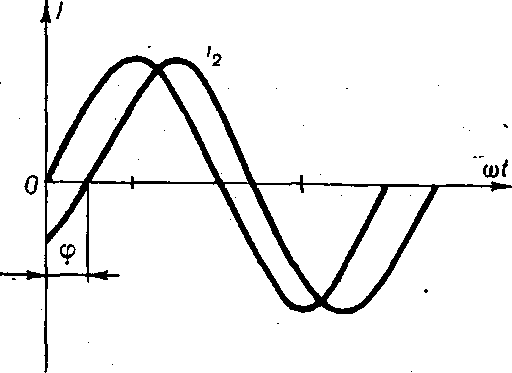
родинамічні прилади. Принцип роботи цих вимірювальних механізмів той самий, що й електродинамічних. Відрізняються вони від електродинамічних наявністю стального сердечника, на якому розміщується обмотка нерухомої котушки, що посилює власне магнітне поле приладу. Рухома котушка повертається так, як і в приладах магнітоелектричної системи.
Застосування стального сердечника посилює поле, захищає прилад від впливу зовнішніх магнітних полів, збільшує обертальний момент. Але присутність сталі має і негативний вплив, бо виникають додаткові похибки при змінному струмі від гістерезису і вихрових струмів.
Точність феродинамічних приладів менша, ніж електродинамічних. Вони широко застосовуються як щитові ватметри і самопишучі прилади-реєстратори, які повинні мати значний обертальний момент.
3—5. ПРИЛАДИ ІНДУКЦІЙНОЇ СИСТЕМИ
Обертальний момент у приладах індукційної системи створюється внаслідок взаємодії між обертовим магнітним полем і вихровими струмами, які індукуються цим полем у рухомому металевому диску або циліндрі (роторі).
Обертове магнітне поле в приладах створюється при наявності двох змінних магнітних потоків, зміщених у просторі і зсунутих за фазою один відносно одного. Отже, за принципом дії такі механізми можуть застосовуватись тільки в колах змінного струму, бо тільки змінні магнітні потоки індукують струми в контурах рухомих частин. *
Індукційні вольтметри і амперметри майже зовсім не застосовуються, бо вони дуже складні порівняно з приладами електромагнітної системи. Індукційні прилади застосовуються тільки як лічильники енергії і ватметри змінного струму. Слід зауважити, що
тепер індукційні ватметри замінені фєр:одаиа»ічиимй/ п0Кази яких менше залежать від темне^атурт і чайтоти.
і Індукційні прилади поділяють на дві групи: прилади з рухомим диском і прилади з рухомим циліндром або обертовим магнітний полем.
Розглянемо будову індукційного приладу з рухомим диском. Алюмінієвий диск 1 (рис. З—7, а), закріплений на одній осі з стрілкою 2, поміщають між двома електромагнітами З і 4. Коли по обмотках електромагнітів 3 і 4 протікають струми Z1 і /2, зсунуті за фазою на кут β, то в приладі створюються два потоки і Фа (рис.З—7,6),зміщені в просторі і зсунуті за фазою на кутр (рис.З—8):
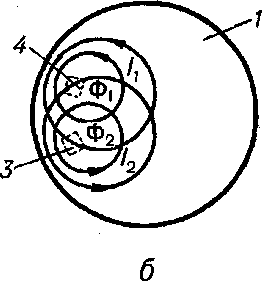 Фі
= Фт, Sin
ші,
Ф2
= Фт,
Sin
(iat
— β).
Фі
= Фт, Sin
ші,
Ф2
= Фт,
Sin
(iat
— β).
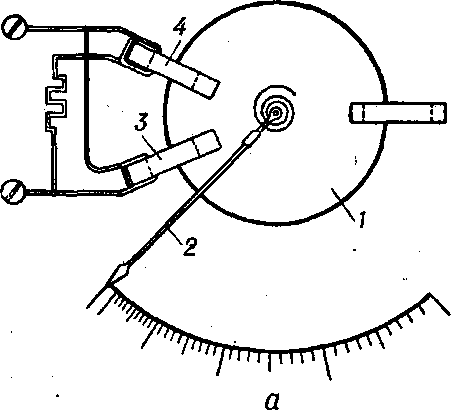
Рис. З—7. Пристрій індукційного приладу з диском.
Ці потоки пронизують диск і створюють у ньому е. р. с. Ei і Ег, а такрж вихрові струми Iie і /2в (подано взаємне розташування потоків і струмів векторною діаграмою, рис. З—9).
Внаслідок взаємодії потоку Фа із струмом, у диску Iie і потоку Ф2 з струмом у диску І\в виникають два обертальних моменти Mi і M2, які обертають диск в одному напрямі:
M1 = C^1120 COS (Ф J2e) = С]ФіІ2е COS (90р + §);
Mt = сгФгІ cos (Ф2/1в) = с2Фг/u cos (90е — β),
або Ai1 = -C^1Z2iSin β, Al18 = сгФ2/(в sin β.
Беручи до уваги, що вихровий струм пропорційний швидкості зміни потоку і частоти, можна записати:
Iu = СіфJ- I2e == с2Ф2/, або /и = с{ Фу і Z2e = сгФ2.
момент Ai у приладі, який діє на диск, дорівнюватиме еумі ,моміентіа. M1 і Af1: ·
M = Ai1-|-Λί? сФЛФг Sin
Якщо вважати, що потоки пропорційні струмам в обмотках і кути зсуву між відповідними струмами та потоками однакові, то обертальний момент
M = CllI2 sin β, де с — коефіцієнт, що залежить від конструкції приладу і сталих величин. -
Будову індукційного приладу з рухомим циліндром або обертовим полем наведено на рис. З—10. На кільцевому магнітопроводі 1, складеному з окремих листів електротехнічної сталі, намотані дві обмотки 2 і 8, розташовані на протилежних полюсних виступах магнітопроводу. Між полюсами на осі міститься алюмінієвий циліндр 4; на цій осі також прикріплені стрілка 7 і спіральна пружина 6. Усередині алюмінієвого циліндра, вміщений циліндричний стальний сердечник З, призначенням якого є зменшення магнітного опору.
Вище було зазначено, що для створення обертового магнітного поля треба мати між магнітними потоками котушок зсув фаз, що дорівнює 90°. Як відомо, зсуву фаз між потоками можна добитися за допомогою додаткового індуктивного або ємнісного опору.
Обертове магнітне поле, перетинаючи бічні стінки алюмінієвого циліндра, індукуватиме в них вихрові струми. Як наслідок взаємодії цих струмів з обертовим магнітним полем створюється обертальний момент, який намагається повернути алюмінієвий циліндр
і зв’язану з ним стрілку приладу в сторону обертання магнітного поля.
Рис.
З—9.
Векторна
діаграма магнітних потоків і струмів.
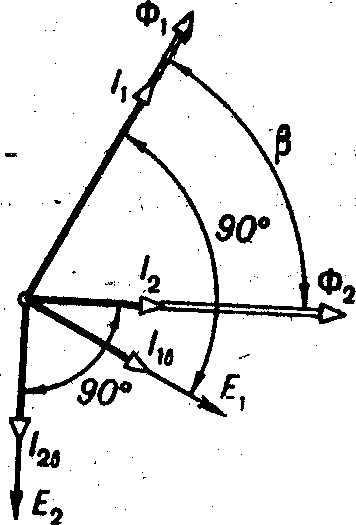
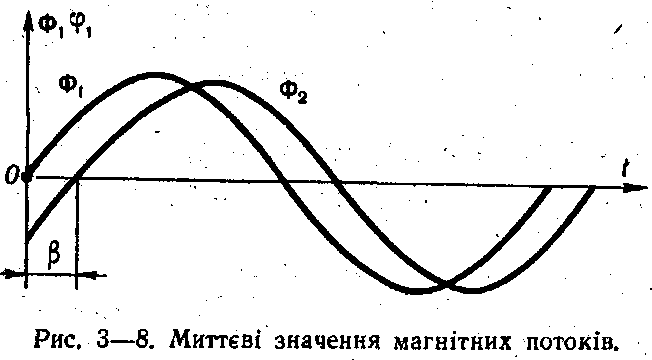
Рис.
3—10. Пристрій
індукційного приладу з обертовим
магнітним полем.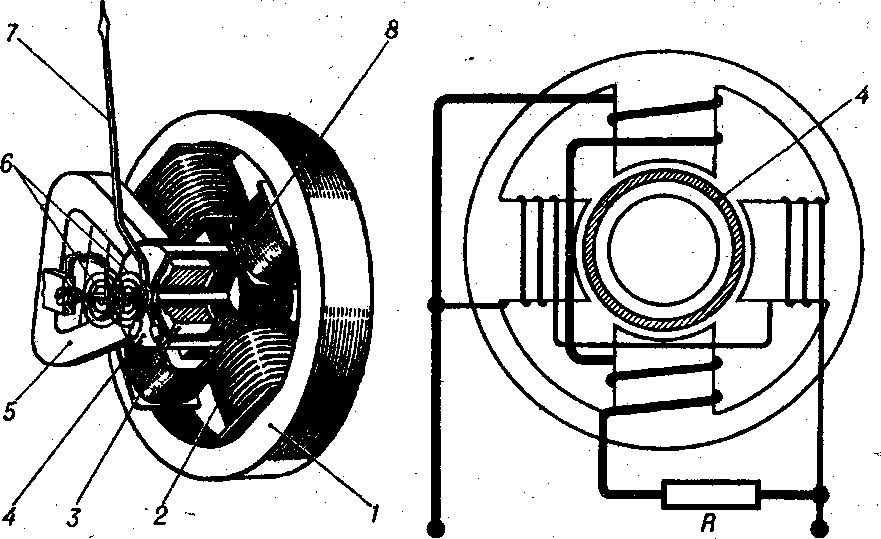
Отже, обертальний момент приладів індукційної системи дорівнює добутку струмів і синусу кута зсуву фаз між ними. Якби струми були у фазі, то вони б не створювали обертального моменту. Коли /_ β = 90°, обертальний момент має максимальне значення; це відповідає (при додатковій умові I1 = I2) в розглянутому нами випадку наявності одного магнітного поля, яке обертається в сторону годинникової стрілки. Коли /_ β = 0°, Існує два однакових магнітних поля, які обертаються в протилежних напрямах; тоді сумарний обертальний момент дорівнюватиме нулю. Протидіючий момент створюється за допомогою спіральної пружини.
3-е. ПРИЛАДИ ЕЛЕКТРОСТАТИЧНОЇ СИСТЕМИ
Принцип роботи електростатичних приладів грунтується на_ взаємодії заряджених електрикою провідників. Схему такого приладу показано на рис. З—11. Він являє собою конденсатор, який складається з двох нерухомих мідних пластинок 1 і однієї рухомої алюмінієвої пластинки 2, яка закріплена на одній осі з стрілкою. Якщо ввімкнути прилад, то нерухомі пластинки набудуть заряду одного знака, рухомі — другого, внаслідок чого між ними виникає сила притягання. Через те що сила взаємодії пропорційна добутку електричних зарядів, а заряди пропорційні напрузі між пластинами, то ця сила буде пропорційна квадрату напруги: .F = C1Ui. Обертальний момент, що діє на рухому систему, буде також (приблизно) пропорційний квадрату напруги: Моб—F T = C1TU1 або Мов = C2Ui.
Через те що протидіючий момент створюється спіральною пружиною, то при рівновазі Ai0S-Mnp; Da = CiU2, звідки а =
= ~ ■ Ui = C3U2 або а = C3U2.
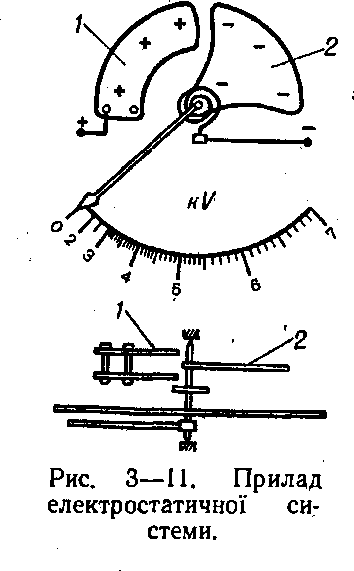 Цей
вираз свідчить про те, що між кутом
повороту рухомої системи і прикладеною
напругою існує (приблизно) квадратична
залежність, атому шкала приладу буде
нерівномірною. Характер шкали залежить
також від форми пластин і їх взаємного
розташування.
Цей
вираз свідчить про те, що між кутом
повороту рухомої системи і прикладеною
напругою існує (приблизно) квадратична
залежність, атому шкала приладу буде
нерівномірною. Характер шкали залежить
також від форми пластин і їх взаємного
розташування.
Електростатичні прилади чутливі до впливу зовнішніх електричних полів. Щоб усунути можливі похибки, прилади екранують. Покази електростатичних вольтметрів практично не залежать від температури, частоти, зовнішніх магнітних полів. Для збільшення обертального моменту збільшують кількість рухомих і нерухомих пластин.
Електростатичні прилади застосовують головним чином для вимірювань високих напруг і для безпосереднього вмикання в електричні кола високої напруги (без трансформації і перетворювачів).
3—7- ПРИЛАДИ ВІБРАЦІЙНОЇ СИСТЕМИ
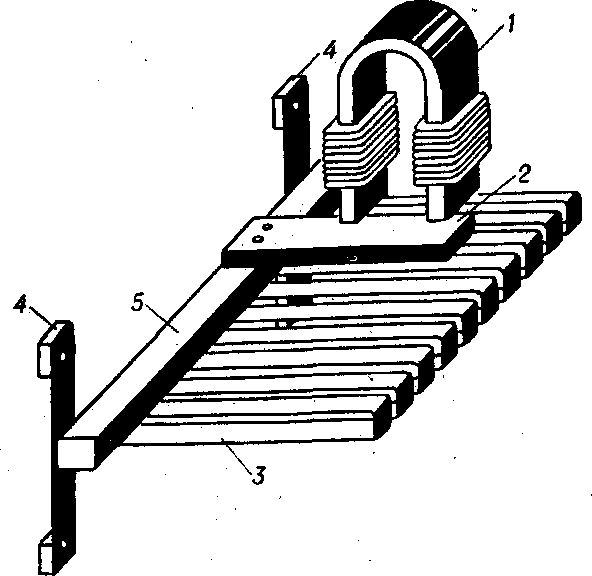 Вібраційні
прилади використовують для вимірювання
промислової частоти. Прилади, якими
вимірюють частоту змінного струму,
називають частот
о м і- рами.
Електричний частотомір (рис. З—12)
складається
з магні'ту 1,
під
яким розташований стальний якір 2,
закріплений
на горизонтальному бруску 5,
а
цей брусок закріплений на пружинних
планках 4.
На
бруску закріплена низка стальних
пружинистих пластинок 3.
Ця
система пластинок має різні періоди
власних коливань. Вони підібрані
так, що кожна пластинка має частоту
власних крливань на 0,5
гц
більшу, ніж
Вібраційні
прилади використовують для вимірювання
промислової частоти. Прилади, якими
вимірюють частоту змінного струму,
називають частот
о м і- рами.
Електричний частотомір (рис. З—12)
складається
з магні'ту 1,
під
яким розташований стальний якір 2,
закріплений
на горизонтальному бруску 5,
а
цей брусок закріплений на пружинних
планках 4.
На
бруску закріплена низка стальних
пружинистих пластинок 3.
Ця
система пластинок має різні періоди
власних коливань. Вони підібрані
так, що кожна пластинка має частоту
власних крливань на 0,5
гц
більшу, ніж
попередня. Вільні кінці Рис. З—12. Прилад вібраційної системи.
кожної пластинки повернуті до спостерігача і загнуті під прямим кутом. Коли по обмотці електромагніту протікає змінний струм, створюється змінний магнітний потік, який діє на якір
і примушує його коливатися. Цей коливальний рух передається планці 5 і пластинкам 3. Усі пластинки приходять у коливання, але найбільшу амплітуду відхилень матиме та, в якій власний період коливання збігається з частотою вимірюваного змінного струму. Проти кожної пластинки на шкалі приладу написане число, яке відповідає частоті струму в герцах. Обмотку електромагніту частотоміра виготовляють з великої кількості витків дроту і вмикають у коло паралельно як обмотку вольтметра. Вібраційні частотоміри не досить точні, чутливі до вібрацій; їх пружинки від часу змінюють свою пружність. Тому для вимірювання частоти останнім часом почали застосовувати стрілочні частотоміри, виготовлені за принципом логометра. Такі частотоміри виготовляють різних систем (феродинамічної, електромагнітної та ін.), проте всі вони мають два вимірюваних кола, які вмикаються за схемою вольтметра.
3—8. ПРИЛАДИ З УРІВНОВАЖЕНОЮ РУХОМОЮ ЧАСТИНОЮ — ЛОГОМЕТРИ
ми
у схемі омметра, положення
рухомої від відношення двох
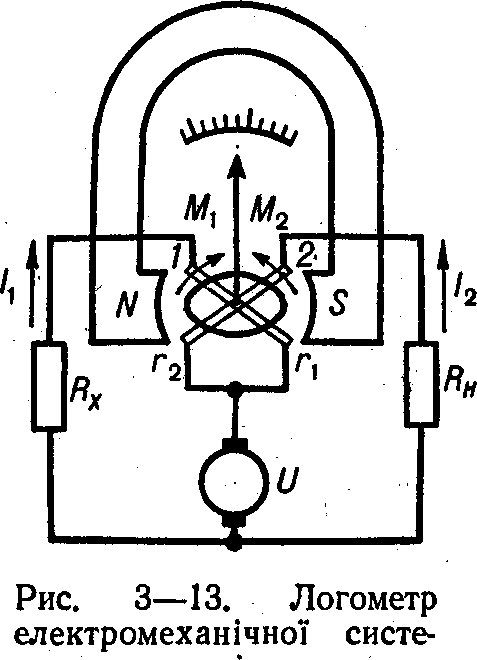
вають безмоментними, або приладами без механічного протидіючого моменту. Стрілка такого приладу, коли струму в котушках немае, може займати довільне положення.
Електровимірювальний прилад будь-якої системи є логометром, коли в нього не тільки обертальний, а й протидіючий момент створюється електрично. Логометричними приладами, звичайно, вимірюють опори, індуктивності, ємності, кути зсуву за фазою, частоту і деякі неелектричні величини.
Нижче ми розглйнемо окремі прилади різних систем, в яких застосований принцип логометра. Як прилад з урівноваженою рухомою частиною розглянемо магнітоелектричний омметр — прилад для безпосереднього вимірювання опору (рис. З—13). У колі постійного магніту розміщують рухому частину логометра, що складається з двох нерухомо з’єднаних між собою котушок, які закріплені йа одній осі. Послідовно в коло однієї котушки логометра вмикають постійний Відомий опір Rh, а в коло другої — невідомий опір Rx. Обидві котушки вмикають паралельно джерелу струму з напругою U за допомогою безмоментних волосків з платини або срібла.
Напрям струмів в обмотках вибирають -так, щоб моменти Ai1 ί Af2, які створюються котушками, діяли назустріч один одному. Один з моментів — обертальний, а другий — протидіючий. При роботі приладу один з моментів залежить від кута повороту. Ця умова повинна виконуватись і для логометрів. Отже, хоч один з параметрів, який визначає величину моменту, повинен бути функцією кута а. За технічним виконанням найпростіше зробити залеж- · ною від кута повороту індукцію В. Для цього магнітне поле в повітряному зазорі повинно бути нерівномірним (для цього сердечник роблять еліпсовидним).
Під дією струму I1 = r"_j^ · створюється обертальний момент
M1 = C1I1F1 (а),.який намагається повернути рухому частину логометра в напрямі руху годинникової стрілки. Тут C1 -V S ■ W1 — стала величина; F1 (а) — функція, яка є виразом закону зміни індукції котушки, коли вона переміщується в зазорі. Аналогічно
СТруМ
ДРУГОЇ
КОТуШКИ /»= г'
ф
СТВОРЮЄ MOMeHT M2
=
C2I2F2(O),
напрям якого протилежний моменту M1.
Коли рухома частина логометра зрівноважена, то M1 = Ai2,
CiIiFi (а) = сгІг F2 (а), або = .
Ґ»ла) C1Ii
Позначимо: = F3 (а) і = с. Відношення магнітних
rS W-
індукцій B1 і B2 залежить від положення котушок — кута повороту а, отже, a = f . З цього виразу видно, що логометр вимірює відношення струмів у котушках.
Чер^а те що кожний із струмів у котушках визначається тією самшвянапружм». Uv-аідношвшнь-етрумів (тобто відхилення рухомої частини логометра) не залежить від напруги.
Оскільки струм /2 є незмінним, а струм I1 залежить від Rx, то кут а відхилення рухомої частини логометра залежатиме від вимірюваного опору Rx і шкала приладу може бути проградуйована в одиницях опору.
Подібно до цього працюють логометри й інших систем: електродинамічної, електромагнітної, феродинамічної і індукційної.
3-9. САМОПИШУЧІ ПРИЛАДИ
Вимірювальні механізми самопишучих приладів можуть бути будь-якої системи, проте найбільше поширені прилади магніто- елЬктричної, феродинамічної та індукційної систем. Крім вимірювального механізму з покажчиком, самопишучі прилади мають пристрої для записування і пристрої для переміщення паперу.
Рис.
З—14.
Схема
пристрою самопишучого приладу з
безперервним записуванням.
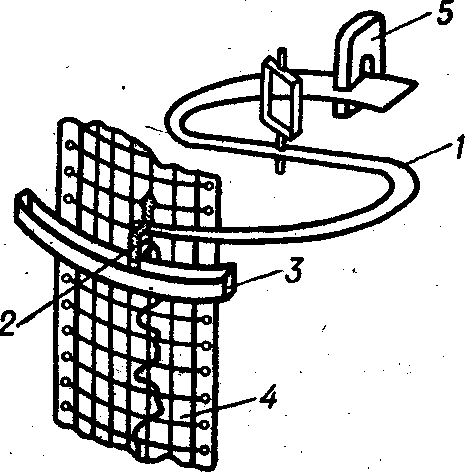
прилади з крапковим записуванням.
Самопишучий прилад з безперервним записуванням магнітоелектричної системи зображений на рис. З—14. Запис виконується найчастіше чорнилом по рухомому паперу за допомогою пера, закріпленого на кінці стрілки. Папір має вигляд стрічки або диска. Паперова стрічка перемотується з одного ролика на другий за допомогою протяжного механізму. Папір приводиться в рух окремим двигуном або годинниковим механізмом. Магнітна система і деталі рухомої частини самопишучого приладу нічим не відрізняється від приладів раніше розглянутих нами систем.
Рухома частина за формою нагадує літеру S.' Механізм для записування складається з капілярної скляної, трубки 2, яка міститься на кінці стрілки і має форму літери Г; один кінець її занурений у чорнильницю З, а другий ковзає по поверхні паперу 4 і фіксує значення вимірюваної величини, креслячи криву. Другий кінець стрілки переміщається в колі постійного магніту 5, що забезпечує заспокоювання рухомої частини. Наявність тертя при роботі між-пером і папером є великим недоліком приладів цієї конструкції.
Прилади з крапковим записуванням одночасно записують кілька процесів. За своєю конструкцією такий прилад дечим відрізняється від приладу з безперервним записуванням (рис. З—15). Стрілка
вимірювального механізму 1 вільно переміщається над папером
не доторкагочитгь до нього. Над ггайером натягнута пофарбована стрічка 3. Через певний відрізок часу дугоподібна скоба 2 падає на стрілку і притискує її разом із стрічкою до паперу. Положення
Рис.
З—15.
Схема
пристрою самопишучого приладу з
крапковим записуванням.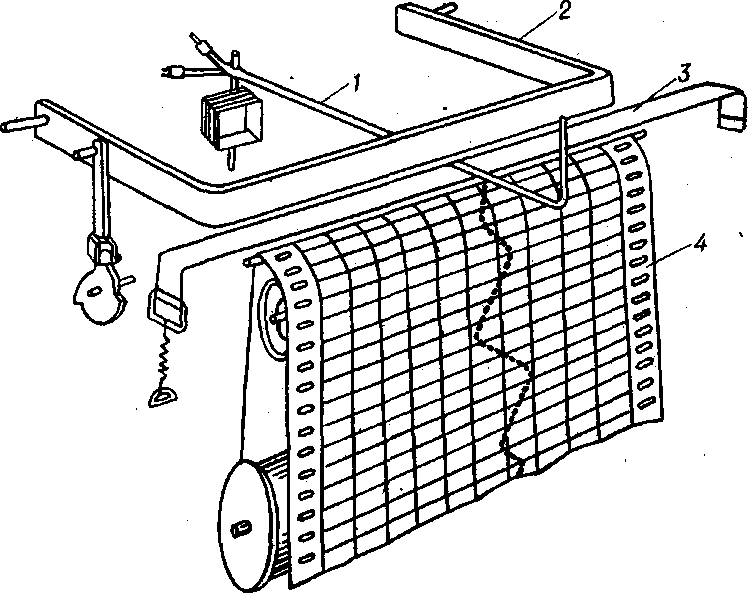
стрілки залежить від вимірюваної величини. На папері залишається слід у вигляді крапок. Падіння дугоподібної скоби відбуває* ться 1—3 рази за хвилину, швидкість руху паперу становить 20— 120 мм/год.
3—10. ЕЛЕКТРОМЕХАНІЧНІ ОСЦИЛОГРАФИ
Електромеханічні осцилографи бувають магнітоелектричної, електромагнітної, феродинамічної і електростатичної систем.
З усіх осцилографів електромеханічної групи розглянемо тільки осцилограф магнітоелектричної системи як такий, що має широке застосування. Основним елементом осцилографа є вібратор — вимірювальний механізм, рухома частина якого відхиляється на кут, пропорційний миттєвому значенню досліджуваної величини.
Для виконання цієї умови треба, щоб частота /„ власних коливань рухомої частини була в кілька разів більша за вищу частоту досліджуваних коливань; частота /0 визначається формулою
![]()
де w — питомий протидіючий момент; J частини.
момент
інерції
рухомої
рис.
З—16.
Пристрій
магнітоелектричного вібратора
осцилографа.

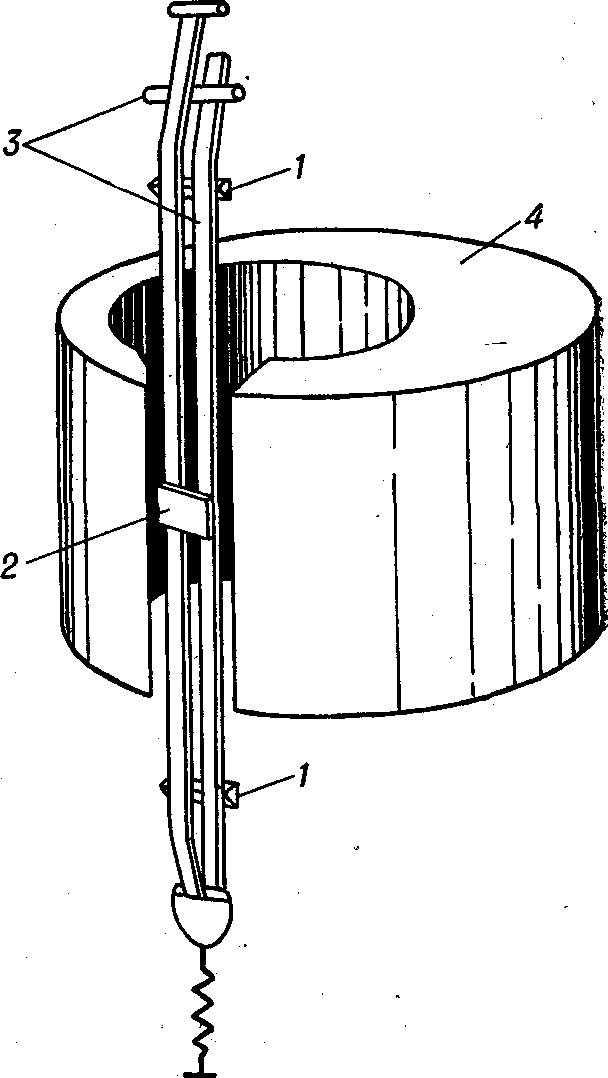
розміщена у натягнутому стані на двох призмах / петля (шлейф) З з тонкої дротини або металевої стрічки. До сеоедньої частини петлі прикріплено невелике дзеркальце
яке відбиває світловий промінь. Якщо по петлі вібратора пропустити досліджуваний струм, то він взаємодіятиме з полем ло- стійного магніту, внаслідок чого створюється обертальний момент, який повертає петлю і укріплене на ній дзеркальце на певний кут навколо вертикальної осі. Якщо струм змінний, то дзеркальце повертатиметься то в один, то в другий бік з частотою змінного струму. Кут повороту залежатиме від амплітуди вимірюваного змінного струму.
Частота власних коливань вібраторів магнітоелектричних осцилографів значно вища за частоту змінного струму і змінюється в межах від 1000 до 15 000 коливань на секунду.
Щоб уникнути деякого впливу власних коливань петлі на наслідки вимірювання, вібратори занурюють у в’язке масло, в якому практично коливання високої частоти згасають. При дослідженні процесів, які швидко протікають, за допомогою осцилографа використовується відбитий від дзеркальця вібратора вузький пучок світлового променя, який повторює коливання дзеркаільця.
Принципова схема оптики осцилографа подана на рис. 3—17.
Промінь від сильного джерела світла 1 проходить через щілину діафрагми S, заломлюється призмою 3 і вузеньким пучком падає на дзеркальце вібратора 4. Відбитий від дзеркальця вібратора промінь світла проходить через фокусуючу призму 5, яка розщеплює його на дві частини. Одна частина променя проходить крізь лінзу 7 і падає на барабан 8, де фіксується на фотопапері або фотоплівці у вигляді маленької світлової крапки. Друга частина про
меня попадає на дзеркальний багатогранний барабан 6, а а нього на матовий екран 9.
Для реєстрації спостережуваного процесу фотопапір на барабані 8 або плівка повинні рухатися з рівномірною швидкістю в напрямі, перпендикулярному до коливань вібратора.
При одноразовій дії ввімкненого вібратора і обертаючої призми внаслідок додавання двох рухів можемо спостерігати на екрані криву, форма якої відповідатиме формі кривої струму у вібраторі.
Рис.
З—17.
Принципова
схема оптики осцилографа.
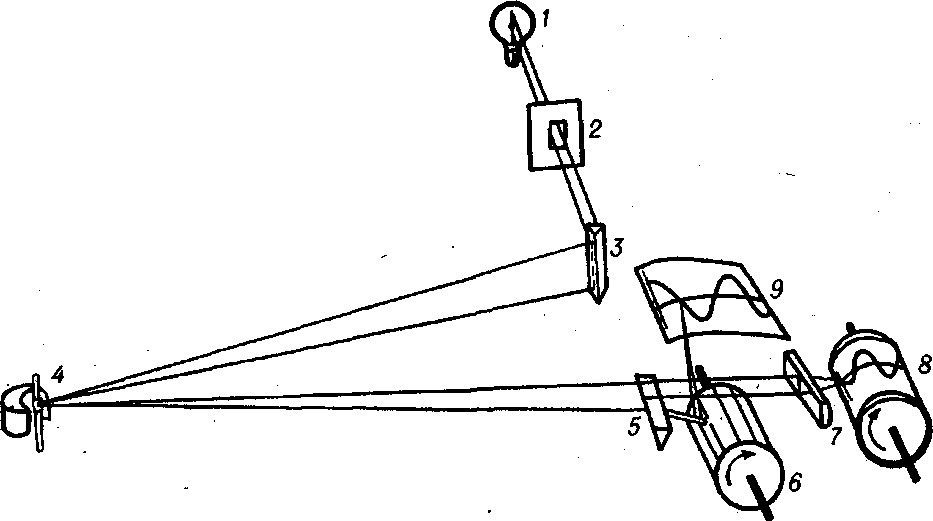
0,04 до 13 мм/ма, чутливість до напруги — від 0,01 до 1 лш/мв, а власну частоту — від 10 до 1 кгц. Чутливість вібратора на екрані в 4 рази більша. Осцилографом типу МПО-2 можна проводити спостереження струмів до 150 ма і напруги до 0,45 це. Для спостереження струмів, більших за 150 ма, застосовують шунти, а для дослідження напруг, більших за 0,45 мв, — додаткові опори.
Для вимірювання миттєвого значення активної потужності випущені ватметрові вібратори, в яких постійні магніти замінені електромагнітами. Електромагніти ватметрового вібратора збуджуються струмом спостережуваного. кола.
Сучасні магнітоелектричні осцилографи мають до 24 вібраторів, що дає змогу одночасно спостерігати до 24 величин.
З—11. ЕЛЕКТРОННИЙ ОСЦИЛОГРАФ
Електронний осцилограф широко застосовується в сучасній електро- і радіовимірювальній техніці; за його допомогою можна вимірювати дуже багато парамбтрів сигналу, у тому числі і його фазу. Основними частинами осцилографа є: електронно-променева
трубка, підсилювачі, генератор розгортання в часг і блок живлення. Блок-схема електронного осцилографа, яка дає уявлення про взаємозв’язок між вузлами, зображена на рис. 3—18, де Yyi-y, — підсилювач напруги; ух, у2 — вертикальні пластини; УXi-X, — підсилювач пилкоподібної напруги; х{, X2 — горизонтальні пластини; ГЧР — генератор розгортання в часі; БЖ — блок живлення, який складається з трансформатора, кенотронів і подільника напруги електронно-променевої трубки.
Б
Ж
Ні·
U
Ol
ч
-EJ
-CJ
ГЧР
Уг-г




З катода 2 вилітає потік електронів, який під дією електричного поля в спеціальному пристрої перетворюється у вузенький Рис_ з—із Блок-схема електронного осци- пучок — електронний про- лографа.
мінь. Цей промінь падає
на покритий люмінесцентною речовиною екран 8. Пристрій, за допомогою якого створюється вузенький пучок електронів, на- зивають електронною «гарматою». Він складається з катода 2Г підігрівника З, керуючого електрода (сітки) 4 і двох циліндричних анодів 5.
В електронно-променевих трубках тепер здебільшого використовують оксидні катоди з непрямим розжарюванням. Це дає змогу збільшити густину струму емісії, що важливо для створення достатньої яскравості зображення. На своєму шляху до екрана електронний потік послідовно проходить між двома парами відхиляю-
Рис.
З—19.
Схема
пристрою, електронно-променевої трубки
з електростатичним керуванням.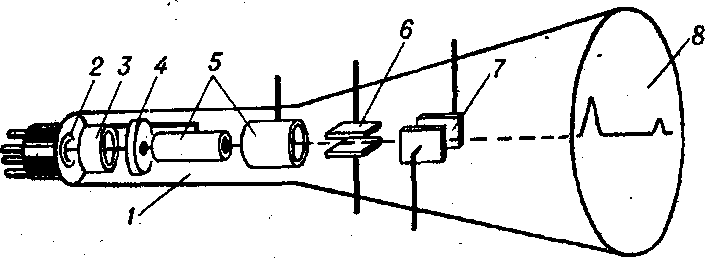
чих пластин б і 7. Змінюючи напругу на цих пластинах, можна змінювати напрям руху електронів і, отже, місцеположення світлового сліду на екрані трубки.
Змінювати напрям руху електронного променя можна електростатичним або магнітним методом. У розглядуваній трубці (рис. З—19) застосований електростатичний метод керування за допомогою пластин 6 і 7. Якщо подамо змінну напругу тільки до пластини 7, то електронний промінь накреслить на екрані вертикальну пряму лінію. Коли ввімкнути тільки пластини 6, то на екрані з’явиться горизонтальна лінія. При одночасному подаванні напруги на обидві пари пластин промінь даватиме на екрані різноманітні криві. Ці криві називають фігурами Ліссажу.
В електронно-променевих трубках з магнітним керуванням фокусування і відхилення електронного променя відбувається під дією магнітних полів; Останні створюються струмами, які проходять по котушках, розташованих за межами трубки. Трубки з електростатичним керуванням застосовуються частіше, ніж з магнітним.
Існують двопроменеві осцилографічні трубки, які в одному балоні мають дві однакові системи фокусування і відхилення променів. Такими трубками можна спостерігати на екрані одночасно два явища. -
3-12. МЕТОДИ ВИМІРЮВАННЯ ОСНОВНИХ ЕЛЕКТРИЧНИХ ВЕЛИЧИН У КОЛАХ ПОСТІЙНОГО І ЗМІННОГО СТРУМІВ
Вимірювання — це процес порівняння будь-якої вимірюваної величини з однорідною величиною, умовно взятою за одиницю вимірювання. Наслідок вимірювання можн» дістати різними методами, використовуючи різні прийоми і їх комбінації.
Під «методом вимірювання» розуміють різні прийоми, за допомогою яких здійснюється вимірювання. Отже, з технічного боку кожний метод характеризується визначеною сукупністю фізичних приладів (основних та допоміжних) і прийомами експерименту.
Залежно від фізичного зв’язку між шуканим і вимірюваним параметрами розрізняють три види вимірювань: прямі (безпосередні), непрямі і сукупні.
При прямих вимірюваннях наслідок вимірювання дістаємо з дослідження одного виміру. До таких вимірювань належать ті, які виконують за допомогою приладів, градуйованих заздалегідь у визначених одиницях (наприклад, вимірювання струму амперметром, напруги — вольтметром та ін.).
При непрямих вимірюваннях наслідок вимірювань дістаємо на основі прямих вимірювань кількох величин, які пов’язані з вимірюваною величиною визначеною залежністю. Прикладом такого вимірювання може бути вимірювання питомого опору.
Вимірявши опір г зразка, його довжину І і переріз q, ми можемо обчислити питомий опір р.
При сукупних вимірюваннях наслідок дістаємо на підставі сукупності прямих вимірювань. Прикладом таких вимірювань може бути визначення температурних коефіцієнтів опору. Так, електричний опір rt провідника визначають з рівняння:
r, =гт[ 1 + <*(/ - 20) + Р(/ - 20)*];
вимірявши опір при трьох різних температурах (20° С, t% і tty, можна визначити температурні коефіцієнти а і β двох матеріалів з рівнянь:
ти = r20[l + OLtf1 - 20) + Ції — 20)*];
П. = r„[I + a(tt - 20) + р(/, - 20)·].
Усі три види вимірювань можна здійснювати різними засобами залежно від вимог точності, умов експерименту, наявності апаратури та ін.
В електротехнічній практиці найбільше застосовується метод прямого вимірювання (безпосереднього відліку), бо цей метод не забирає багато часу і досить простий.
3—13. ВИМІРЮВАННЯ ЕЛЕКТРИЧНИХ ОПОРІВ. ОММЕТРИ
В електротехніці умовно прийнято таку класифікацію опорів за Ix величиною: а) малі опори — до 1 ом; б) середні опори — від
до 100 000 ом; в) великі опори — від 100 000 ом і більше.
Електричні опори вимірюють трьома основними методами (залежно від величини вимірюваного опору): а) метод амперметра і вольтметра; б) метод безпосередньої оцінки з застосуванням омметра; в) метод порівняння за допомогою вимірювальних мостів і потенціометрів (мостовий метод).
За методом порівняння опори вимірюють здебільшого в лабораторіях.
Розглянемо вимірювання опорів амперметром і вольтметром. Цей метод знайшов найбільше застосування. Амперметром вимірюють величину струму в опорі, а вольтметром— спад напруги на
цьому опорі. Потім за законом Ома визначають опір: гх — ~.
Можливі два варіанти вмикання амперметра і вольтметра (рис. З—20). За схемою рис. З—20, а вимірюють великі опори: тут вольтметр ураховує не тільки спад напруги на опорі гх, а й порівняно незначний спад напруги на затискачах амперметра; за схемою рис. 3—20, б вимірюють малі опори, тут амперметр ураховує не тільки струм в опорі, а й порівняно незначний струм, який протікає через вольтметр.
Шуканий опір для схеми рис. З—20, а = але Ue--
*а
Ux
. — Ux + Ja ■ га, тому Гх = — 4- га. Оскільки в цій схемі
Iq
Ia = їх, TO
^ = Jx- + Га = гх + га.
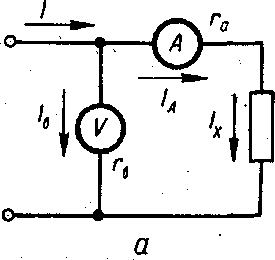 Ix
Ix
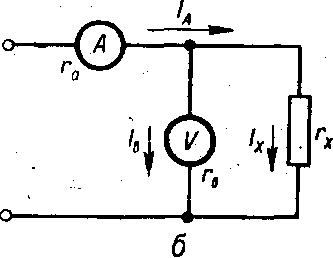
Рис. 3—20. Схеми вимірювання опору методом амперметра і вольтметра; а — середніх опорів; б — малих опорів.
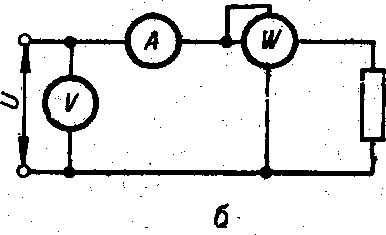 Таким
чином, опір г'х
відрізняється від дійсного значення
опору гх
на величину опору амперметра га.
Інакше кажучи, за показами приладів
.ми знаходимо суму опорів rx
-J-
г.а,
тому маємо похибку вимірювань незалежно
від точності приладів. Ця похибка
Таким
чином, опір г'х
відрізняється від дійсного значення
опору гх
на величину опору амперметра га.
Інакше кажучи, за показами приладів
.ми знаходимо суму опорів rx
-J-
г.а,
тому маємо похибку вимірювань незалежно
від точності приладів. Ця похибка
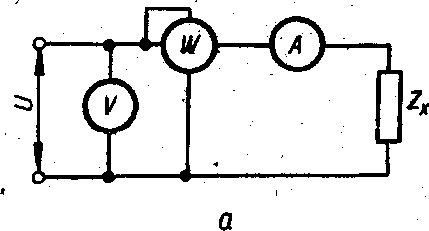
Рис.' З—21. Схеми вимірювання опору приладами безпосередньої оцінки у колах змінного струму.
для схеми рис. З—20, a: Ta = ——— — — . Опір гх для схеми
U U
рис. З—20, б: г"х — = ——--, де І, — струм у колі вольтметра,
Ia Ix +Л
U
що дорівнює ~. Ураховуючи, що в цій схемі Ue — Uxi знаходимо:
У цьому разі ми знаходимо загальний опір паралельного сполучення гх і гв. Похибка для цієї схеми буде:
Вимірювати опір амперметром і вольтметром можна і в колах змінного струму. У цьому разі буде виміряно повний опір Z, а йе опір постійного струму.
Якщо треба виміряти окремо активний і реактивний опори, то, крім амперметра і вольтметра, потрібний ще й ватметр, який вмикають у коло за однією із схем рис. 3—21, а і б. Активний г'х і реактивний Χχ опори можна визначити з таких рівнянь:
![]()
де U, І і-P — покази, відповідно, вольтметра, амперметра, ватметра. Розглянутий метод вимірювання опорів досить поширений у практиці (вимірювання опорів обмоток електричних машин і котушок різних електромагнітних апаратів та пристроїв).
Вимірюваная опорів омметрами. Електричну схему омметра можна виконати в двох варіантах: з послідовним і паралельним вмиканням вимірюваного опору і вимірювального механізму.
а 1
Рис.
З—22.
Принципові
схеми омметрів:
а
— послідовна; б — паралельна.
б
CS
я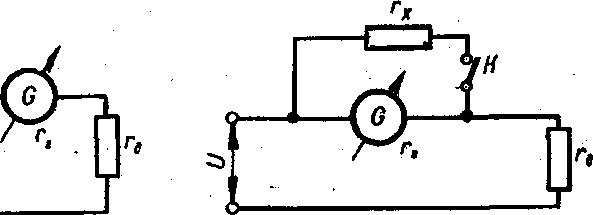
![]()



Послідовну, схему застосовують для вимірювання великих, а паралельну — для вимірювання середніх опорів. Щоб з’ясувати принцип дії омметра; розглянемо схему рис. 3—22, а.
У коло джерела постійного струму з напругою U послідовно ввімкнені відомий опір гв, вимірюваний опір гх і гальванометр G. Величину струму в колі визначимо за законом Ома:
гд 4" гх + гг ’
де гв — опір гальванометра.
Через те що опори Гд і гг сталі, при сталій напрузі U струм у колі залежатиме тільки від опору гх. Тому кожному значенню опору гх відповідає визначена величина струму в гальванометрі. Тоді шкалу гальванометра можна безпосередньо градуювати в омах; при вмиканні струму стрілка омметра покаже^на шкалі величину вимірюваного опору.
Якщо замкнути вимикач К, то вимірюваний опір гх закорочу- €ться (гх = 0), і відхилення стрілки приладу буде найбільшим. Якщо вимикач K розімкнути, то стрілка приладу не відхилятиметься. Якщо потім замість гх ввімкнути змінний відомий опір, то шкалу приладу можна градуювати безпосередньо в омах. Проте коли гх мале порівняно з опором котушки гальванометра гг, то ввімкнення вимірюваного опору гх не спричинить помітної зміни струму в колі. Тому омметри з послідовним електричним колом призначені для вимірювання порівняно великих опорів. Омметри, які вимірюють опори порядку сотень тисяч і мільйони омів, називають мегомметрами. Для вимірювання малих опорів застосовують схему рис. З—22, б. Вимірюваний опір вмикають паралельно вимірювальному приладу, кут повороту рухомої частини приладу залежатиме від вимірюваного опору гх.
Покази омметрів з послідовним або паралельним вмиканням вимірювального приладу залежать від сталості напруги джерела живлення кола, що є великим недоліком цих приладів. Щоб покази приладу не залежали від коливань напруги джерела живлення, в омметрах широко використовують вимірювальний механізм магнітоелектричного логометра (див. рис. 3—13).
3-14. ВИМІРЮВАННЯ ПОТУЖНОСТІ І ЕНЕРГІЇ У КОЛАХ ПОСТІЙНОГО СТРУМУ
Потужність у колах постійного струму можна вимірювати двома способами: непрямим і прямим (безпосереднім) відліком.
а) Непрямий відлік здійснюється за допомогою вольтметра і амперметра, через те що потужність P = U-I.
б) Потужність визначається також безпосередньо ватметрами (другий спосіб). Тепер застосовують тільки електродинамічні ватметри. Нерухома котушка електродинамічного приладу вмикається в коло послідовно і є струмовою котушкою ватметра, рухома — паралельно. Кут відхилення стрілки пропорційний потужності, шкала приладу градуюється безпосередньо в одиницях потужності — ватах.
Для обліку електричної енергії постійного струму застосовують лічильники електродинамічної системи. На рис. З—23 зображено схему електродинамічного лічильника.
Лічильник складається з двох нерухомих котушок А і A1, які вмикають у коло послідовно. Між цими котушками обертається якір Я. Що складається з кількох котушок з тонкого ізольованого
дроту. Послідовно до якоря за допомогою щіток Щ увімкнено додатковий опір Re і компенсаційну котушку К. Сам якір з компенсаційною котушкою ввімкнений у коло паралельно. Між струмом якоря і магнітним полем нерухомих котушок виникає обертальний момент M06 = It1 Ф,, який приводить у рух якір. На осі якоря є алюмінієвий диск Д„ Обертаючись, диск перерізує магнітні силові лінії постійного магніту М, внаслідок чого в ньому індукуються вихрові струмиі
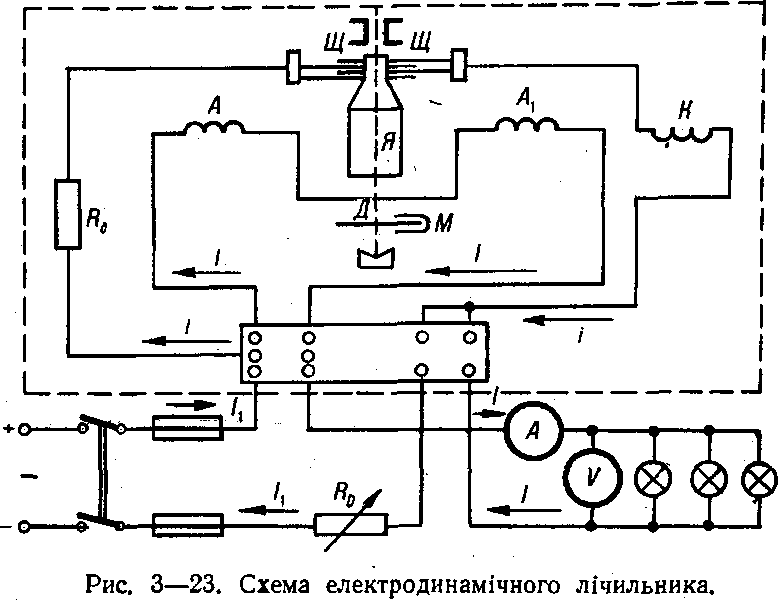
Магнітний потік послідовних котушок дорівнює: Ф = · І, де / — струм навантаження; k2—коефіцієнт пропорційності. Додатковий опір Rs становить значну частину опору якоря. Виготовляють його 3 матеріалу з малим температурним коефіцієнтом опору. Тому опір якоря можемо вважати сталим. Отже, матимемо: i = k9 U, де і — струм якоря; U — напруга сітки; ka — коефіцієнт пропорційності.
Обертальний момент буде Mo6 — kt ■ ■ k3 U ■ I = k4 ■ U· · /. Коли швидкість руху буде сталою, цей обертальний момент зрівноважуватиметься протидіючим моментом: Mo6 — Mnp.
Протидіючий момент утворюється від взаємодії вихрових струмів диска з полем постійного магніту: Mnp ■= F' ■ г, де F — гальмівна електромагнітна сила від вихрових струмів; г — віддаль від точки прикладання сили до осі обертання.
F — k$ · Ie. с.
(
де І в. с. — вихровий струм диска:
, аВп ,
— ϊζ — Rg — Re · п,
де Ed — е. р. с. диска, Rd — опір диска. Тоді Mnp- kt · kt ■ г ■ п, або Mnp = fe4 ■ U ■ І — къ ■ ke ■ г · η, або U I = k7 . ti ■ т. Помноживши останнє рівняння на t, дістанемо:
U - I ■ t = k7 ■ г - N,
де U ■ I ■ t — електрична енергія, яка витрачається з сітки за час t\ п — кількість обертів диска за 1 сек, a і — час роботи лічильника, сек·, N — кількість обертів за час і. Візьмемо: k7 ■ т =
U -І ■ t
= с = —jj—, де с — стала лічильника.
Розрізняють сталу дійсну і номінальну. Номінальну сталу вста- · новлює завод, який виготовив лічильник, у вигляді запису на пас» порті лічильника: 1 кет · год = N обертів. З цього рівняння визначаємо номінальну сталу лічильника:
1 кет год 1000 - 3600 *1000 , л
Ch
— jj =?=
-Jj-
вт · год І оберт — ^ вт
■ сек! оберт.
Дійсну сталу знаходимо за формулою:
Ca
=
^
^ 1
вт
· сек!оберт,
де U і / — напруга і струм сітки; N1 — кількість обертів лічильника за час і, -сек.
Компенсаційна котушка K компенсує втрати від тертя. Струм якоря, взаємодіючи з полем компенсаційної котушки, утворює додатковий момент, який має компенсувати втрати від тертя. Якщо цей додатковий момент перевищуватиме момент від тертя, то лічильник обертатиметься при відсутності навантаження. Таке явище, коли лічильник обертається при відсутності навантаження, називається самоходом лічильника.
За ГОСТом при збільшенні напруги до 110% від номінальної- лічильник повинен залишатися нерухомий.
Абсолютна похибка лічильника: ЛЛ = ск — Cd.
C Ся
Відносна похибка лічильника: / = — 100%, яка для
сн
лічильника другого класу точності при навантаженні від 10 до .· 100% від номінального не повинна перевищувати +3%; якщо f більша за ±3%, то лічильник треба регулювати, змінюючи положення магніту M відносно диска D і радіус г.
Чутливістю. лічшіьннка називають відношення мінімального струму, при якому диск лічильника починає обертатись, до номінального струму: о = 1SB . 100%.
Ih "і
Чутливість не повинна перевищувати 1% для лічильників дру-. гого класу і 0,5% для лічйльників першого класу.
Число обертів лічильника фіксує лічильний механізм, який приводиться в рух від черв’ячної передачі. Передачу вибирають такою, щоб можна було відразу відрахувати пропорційну обертам лічильника електричну енергію.
15. ВИМІРЮВАННЯ ПОТУЖНОСТІ 1 ЕНЕРГІЇ В КОЛАХ ЗМІННОГО СТРУМУ
Для вимірювання потужності в колах змінного струму застосовують електродинамічні, феродинамічні та індукційні ватметри.
Ви мірювання активної потужності однофазного змінного струму. Вимірювати потужність у колі постійного струму можна непрямим і прямим способами. У колі змінного струму вимірювати потужність амперметром і вольтметром (непрямий спосіб) можна тільки тоді, коли відомий кут φ, через теі що середнє значення потужності визначається також коефіцієнтом потужності cos φ; P = U I cos φ. Цей метод може бути застосований тільки при активному навантаженні, тобто, коли cos φ — 1- Коли cos φ < 1, активну потужність треба вимірювати ватметром за однією з схем рис. З—24, а і б. У випадку схеми рис. 3—24, а сила струму в нерухомій котушці / приладу дорівнює струму кола I1; при цьому рухома котушка ввімкнена під напругу U = U1 + AU = I ^R1 + Rs), де R2 --- опір нерухомої котушки; Δ £/ — спад напруги на нерухомій котушці; R1 — опір кола; U1 — спад напруги на споживачі. Напруга U більша від напруги на' затискачах споживача на величину AU = I1 ■ Rt, отже, потуж·· ність, яка відлічується приладом, дорівнює:
P = (U1 + AiZJZ1COSf > U1IlCos φ.
У другому випадку (рис. 3—24, б) струм / в нерухомій котушці приладу дорівнює сумі Z1 + Z*, де I2 — струм у рухомій котушці, а напруга на затискачах рухомої котушки дорівнює напрузі на затискачах споживача U1.
Потужність, яка вимірюється приладом, у цьому випадку дорівнює:
P = (I1 + I^U1 cos φ > U1I1 cos φ.
Перший спосіб (рис. З—24, а) застосовується при малому струмі і значних напругах на затискачах у колі приймача, другий — при великих струмах у колі приймача.
Вимірювання а к т и ї ή of iitfty ж η ості в колі трифазного струму. Вимірюючи активну потужність і енергію трифазного струму, застосовують різні методи і схеми вмикання ватметрів залежно від характеру навантаження — рівномірного або нерівномірного — і від схеми — трипровідної або
Рис.
З—24.
Схема
вмикання котушок ватметра у коло
споживача:
а
— при малих струмах; б — при великих
струмах.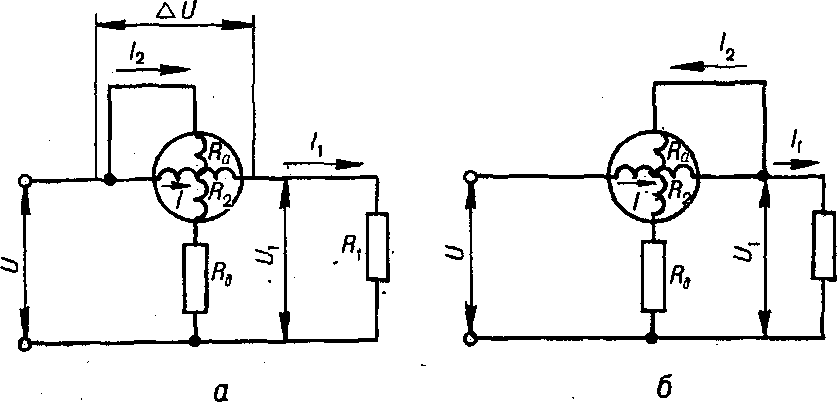
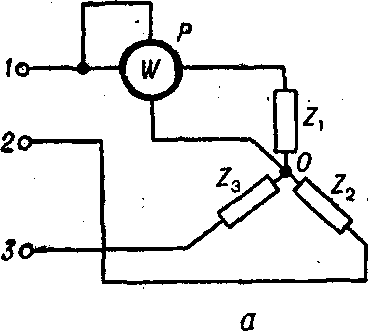 чотирипровідної.
Коли навантаження рівномірне, вимірювання
можуть, бути проведені за допомогою
одного ватметра, при нерівномірному
навантаженні і трипровідній системі —
двома ватметрами (або одним
двоелементним), при нерівномірному
навантаженні і чотирипровідній
системі — трьома ватметрами або одним
триелементним.
чотирипровідної.
Коли навантаження рівномірне, вимірювання
можуть, бути проведені за допомогою
одного ватметра, при нерівномірному
навантаженні і трипровідній системі —
двома ватметрами (або одним
двоелементним), при нерівномірному
навантаженні і чотирипровідній
системі — трьома ватметрами або одним
триелементним.
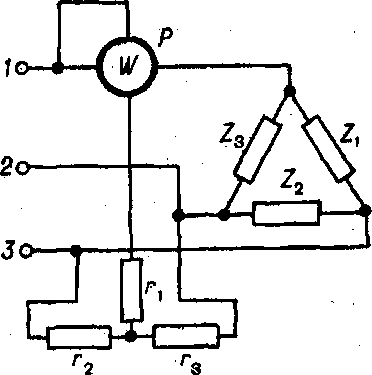
Рис. З—25. Схема вмикання ватметра: а — коли доступна нульова точка при рівномірному навантаженні; 6 —коли штучна нульова точка і навантаження рівномірне у всіх фазах.
Розглянемо методи вимірювання потужності для різних випадків. Потужність трипровідної системи при рівномірному навантаженні в усіх трьох фазах можна вимірювати одним ватметром за одним з двох варіантів (рис. 3—25).
Для вимірювання потужності за схемою рис. 3—25, а досить мати один однофазний ватметр, який вмикають так, щоб через його послідовну котушку проходив фазний струм, а паралельна котушка була під фазною напругою.
Коли ж нульова точка навантаження, сполученого зіркою, недоступна або коли споживачі сполучені трикутником (рис. 3—25, б), паралельну котушку ватметра вмикають до штучної точки. Штучна нульова точка створюється трьома додатковими опорами rlt г2, г8, сполученими зіркою. Опори повинні бути підібрані так, щоб г2 = = r3 = T1 + гвт,
де Гвт — опір паралельної котушки ватметра.
а
Рис.
З—26.
Схема
вмикання трьох ватметрів для вимірювання
потужності трифазної системи при
нерівномірному навантаженні:
а
— нульова точка присутня; б — нульова
точка відсутня.
6


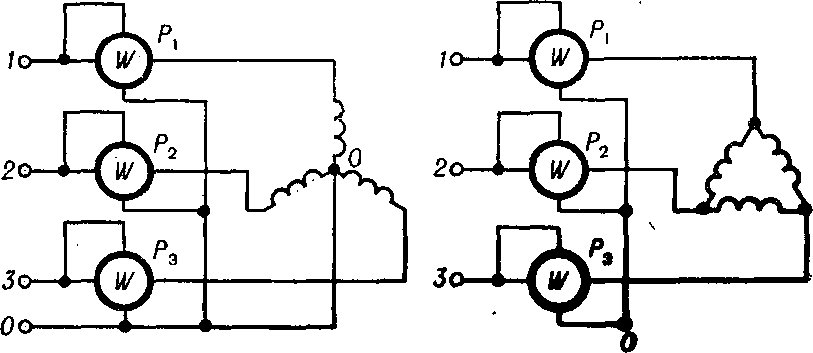
Якщо застосовується ватметр індукційної системи, то додаткові опори повинні бути обов’язково індуктивними.
Потужність трифазної системи в три рази більша за потужність однієї фази, виміряної ватметром:
P = З Рф = W ф ■ Іф cos φ = УЗ UaIa- cos <р.
При нерівномірному навантаженні в чотирипровідній системі трифазного струму для вимірювання потужності застосовують схему трьох ватметрів, рис. 3—26. Кожний однофазний ватметр вимірює потужність однієї фази. Потужність усієї системи дорівнює сумі показів усіх трьох ватметрів:
P = Pl +Pi +P3 = IlUlCosn+ UU і Costp2+ Z3^3 cos φ3.
Потужність трипровідної трифазної системи незалежно від способу сполучення фаз зіркою або трикутником, рівномірного або нерівномірного навантаження можна виміряти способом двох ватметрів за схемою рис. 3—27 (схема Арона) або одним трифазним, який називається двоелементним ватметром. У цьому ватметрі конструктивно оформлені в одному корпусі два однофазні ватметри. Послідовні котушки ватметрів вмикають у будь-які дві фази, а кінці паралельних котушок підводять до вільної третьої фази.
Доведемо, що сума показів двох ватметрів дорівнює потужності трифазної системи, тобто P1 + P2 = Р\ф + Р2Ф + РгФ, або
U Х2І і cos (U12Ix) -j- U32/3COS (U32І3) = U Х2112 cos (U12I1^)
+ U23I23 cos (U23I23) -J- U31I31 cos (U31I31).
Рис.
3—27.
Схема
вимірювання потужності способом двох
ватметрів.
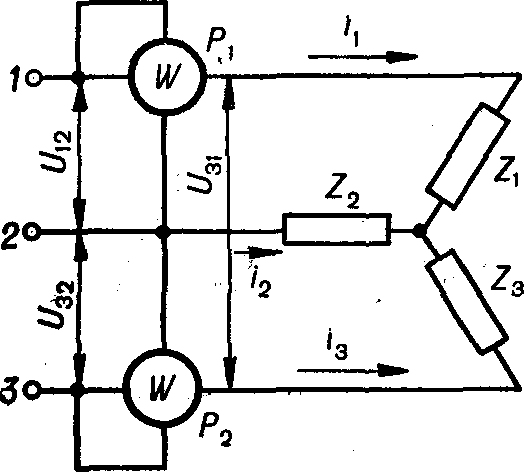
Значення миттєвої потужності, виміряної ватметром першої фази, PI = M1211 і ватметром у третій фазі Рз = U32I3.
значень
потуж-
U1Zli
U3
2І3.
Подамо
лінійну напругу на паралельних
котушках ватметрів через фазні напруги:
U12
= U1
—
U2
і
U32-U3
—
и2.
За першим законом Кірхгофа сума струмів
для нейтраль-
і
і + Із +
Із
— О, ЗВІДКИ I1
+ I3
I2.

HOl ТОЧКИ I1
Отже, вираз миттєвої потужності двох ватметрів можна записати у вигляді:
P = P1 + Рз = («і — и2) іг + («з — и2) і3 = U1I1 +
+ и3І3 — U2 (Іі + І3) = U1I1 + U2I2 + и3і3 = P1 +
+ P2 + P3,
тобто сума показів обох ватметрів у будь-який момент часу дорівнює сумі потужностей усіх трьох фаз.
До цього висновку прийдемо, якщо побудуємо векторну діаграму рис. 3—28, користуючись діючими значеннями напруг і струмів. З діаграми маємо:
до першого ватметра підведені напруга U12, струм I1, кут зсуву фаз між ними становить 30° + <Рі, отже,
до другого ватметра підведені напруга U32, струм I3, кут зсуву фаз між ними становить (30° — φ3), отже,
P2 = U3а · I3 cos(30° — φ3).
При симетрії напруг і струмів U12- U32 = U; I1 = I2 = I3',
Фі
=
Фа
=
<Рз
=
<Р-
Сума показів обох ватметрів:
P1 + P2 = UI [cos (30° + φ) + cos (30° — φ)] =
= UI[cos 30° · cos φ — sin 30° sin φ + cos 30° cos φ +
+ sin 30° - sin φ] = YH UI cos φ.
Рис.
З—28.
Векторна
діаграма до вимірювання потужності
трифазної системи двома ватметрами.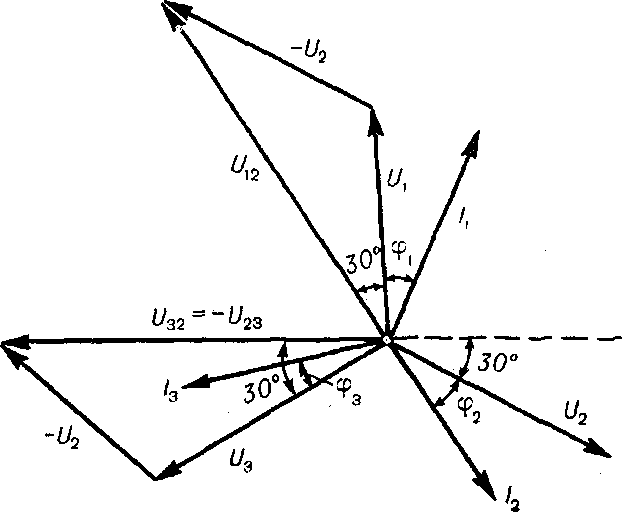
Сума показів двох ватметрів дає потужність трифазної системи. Легко пересвідчитись, що розподілення трифазної потужності між ватметрами залежить від кута зсуву фаз φ.
Дійсно, коли φ = 0°, обидва ватметри показують однакові
т/з
потужності, а саме: P1 — P2 = Ul. Із збільшенням кута φ
покази одного з ватметрів збільшуватимуться, а другого зменшуватимуться.
Електричну енергію в колах змінного струму вимірюють переважно лічильниками індукційної системи. Увімкнення лічильників електричної енергії в кола змінного струму принципово нічим не відрізняється від увімкнення ватметрів. Трифазні лічильники об’єднують в одному приладі два або три однофазні лічильники, в яких результати вимірювання механічно додаються внаслідок дії двох або трьох рухомих елементів індукційних лічильників на загальну вісь і загальний лічильний механізм.
Для вимірювання реактивної потужності і енергії широко застосовуються особливі схеми з використанням звичайних ватметрів і лічильників, які називаються реактивними ватметрами і лічильниками з заміненими напругами. Заміна напруг полягає в тому, що паралельну котушку ватметра вмикають на так звані «чужі фази» (рис. З—29, а). Через те що зсув фаз між струмом Ii і напругою Un становить (90° — φ) (рис. 3—29, б), то покази ватметра будуть:
P = Ui3Il COS (90° — φ) = UiaI1 sin φ.
Рис.
З—29.
Схема вмикання
ватметра (лічильника) «на чужі фази»
(а) і векторна діаграма до цієї схеми
(б).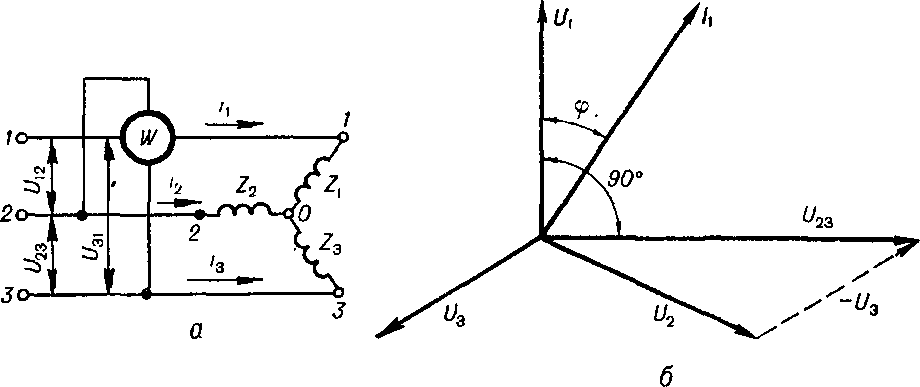
Оскільки при повній симетрії реактивна потужність дорівнює: Q = V3 UaIa sin φ, то для визначення реактивної потужності трифазної системи покази ватметр Q, увімкненого за схемою рис. 3—29, треба помножити на ]/3, або
U 2з = Ua і I1 = ІА.
Реактивну енергію в колах трифазного струму вимірюють, як правило, дво- або триелементними лічильниками індукційної системи. Ці прилади придатні для вимірювання потужності і енергії як при рівномірному, так і при нерівномірному навантаженні фаз. Якщо навантаження симетричне, то обов’язково треба додержуватись послідовності чергування фаз при вмиканні в коло трифазного струму.
Значення коефіцієнта потужності можна визначити двома методами: непрямим і прямим.
Непрямим методом коефіцієнт потужності в колах однофазного змінного струму визначають за показами вольтметра, ампер-
р
метра і ватметра (рис. 3—30): cos φ = -щ.
Визначивши cos φ, легко знайти кут φ, реактивну потужність Q = UI sin φ, реактивну складову струму Ip — I sin φ та ін.
Цими вимірювальними приладами коефіцієнта потужності в колах трифазного струму з рівномірним навантаженням визначають
р
за формулою: cos φ = >
-¾)
Величину cos ψ в колах трифазного змінного струму при рівномірному навантаженні фаз можна також визначити двома однофазними ватметрами за формулою:
,— D р
tg<? = V3 Ρΐ Ρι
Рис. З—ЗО. Схема непрямого Спосіб визначення cos φ двома ват- вимірюван^жк^цієнта по* метрами широко використовується у виробничих умовах при випробуваннях двигунів.
Середнє значення коефіцієнта потужності cos <pfp за певний час можна знайти за показами лічильників активної і реактивної енергії з формули:
Aa
C0S
=
Vf
Л·
3:
’
V Al + Al
де Aa — активна енергія; Ap — реактивна енергія. Можна знайти А. .
tg ?ср — ~г і визначити за тригонометричними таблицями відпо-
БІДНИЙ COStpcp.
Миттєве значення коефіцієнта потужності на практиці визначають за допомогою спеціальних приладів — фазометрів.
Безпосередньо і неперервно коефіцієнт потужності cos φ вимірюють фазометрами.
На практиці для вимірювання коефіцієнта потужності найшир- ше застосовується фазометр електродинамічної системи.
Електродинамічний фазометр логометричного типу однофазного струму має одну нерухому котушку 3 і дві рухомі 1 і 2, жорстко скріплені між собою під кутом 90° (рис. З—31, а, б). Нерухома котушка ввімкнена в коло послідовно з споживачами електричної енергії, а рухомі — паралельно. У коло котушки 1 вмикають додатковий
активний опір га, а в коло котушки 2 — реактивний опір X2- При значній величині додаткового опору струм Z1 у першій котушці збігається за фазою з напругою, а в другій відстає від напруги на 90°, а від струму / — на кут 90° — φ.
Рис.
З—31.
Електродинамічний
фазометр: а
—схема електричних з'єднань та вникання
в коло; б — схема пристрою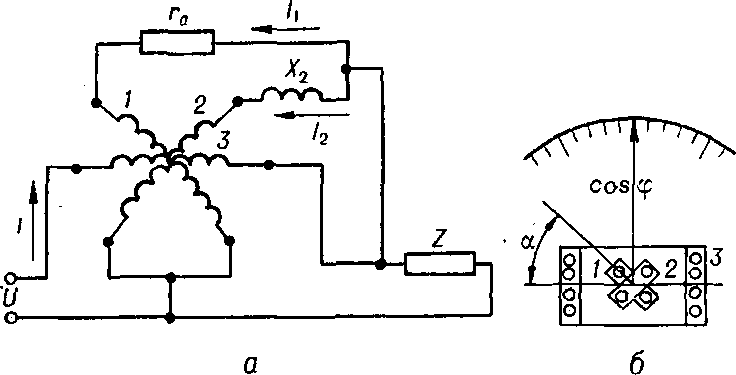
Згідно з векторною діаграмою електродинамічного фазометра (рис. 3—32):
I1 = Im sin сot\ і = Im sin (Ш — <р); і2 = Im sin (ші — 90°);
U — Um sin ωί.
Рис.
З—32.
Векторна
діаграма електродинамічного
фазометра.
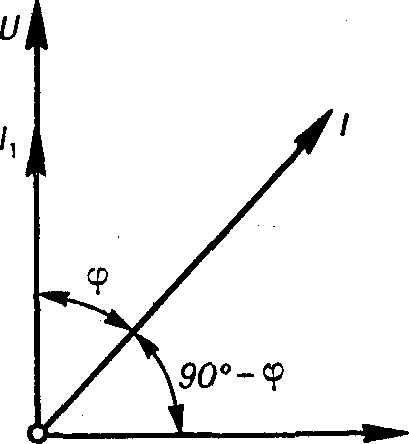
Моменти діють протилежно, рухома система повертатиметься в напрямі більшого з них. Через те що в один з них входить sin а, а в другий cos а, то при повертанні рухомої системи більший з моментів зменшуватиметься, а менший — збільшуватиметься.
Відхилення рухомої системи припиняється, коли моменти M1 і TW2 будуть однакові, тобто:
Zj1ZZ1Sin a cos φ=^2ZZ2 sin φ cos а, звідки: tga==^tg? = Xi · — tgf, або tga = c-tg<p. Отже,
v/i 1 А
відхилення стрілки приладу залежить від кута зсуву фаз φ, і шкала приладу визначається в градусах і значеннях cos?.
18. ЗАГАЛЬНІ ПРИНЦИПИ ЕЛЕКТРИЧНИХ МЕТОДІВ ВИМІРЮВАННЯ НЕЕЛЕКТРИЧНИХ ВЕЛИЧИН
У сучасних умовах високого розвитку техніки електричні вимірювання неелектричних величин є досить широкою галуззю вимірювальної техніки; вони охоплюють вимірювання значної кількості величин і параметрів, які характеризують різні фізичні та хімічні явища і виробничі процеси. Широке застосування електричних методів вимірювання неелектричних величин пояснюється такими перевагами цих методів: можливістю дистанційних вимірювань; високою точністю; можливістю неперервної реєстрації і записування тривалих та миттєвих процесів; широким діапазоном вимірюваної величини. Вимірювання неелектричних величин електричними методами зводиться до того, щоб неелектричну Величину перетворити в залежну від неї електричну величину, після вимірювання якої дістанемо шукану неелектричну величину.
Пристрої і прилади, за допомогою яких здійснюється це перетворення, називаються перетворювачами, або датчиками. Датчики є невід’ємною частиною кожної схеми електричного вимірювання неелектричних величин.
—07
![]()
Рис. З—33. Структурна схема електричного приладу для вимірювання неелектричних величин електричними методами:
/ —об'єкт вимірювання; 2 —датчик; 3 — підсилювач сигналу; 4 — вимірювальна схема; 5 — вимірювальна величина; 6 — реєстрована величина; 7 — електровимірювальний стрілочний прилад; 8 — шлейф осцилографа.
Відповідно до викладеного структурна схема електричного пристрою для вимірювання неелектричних величин у загальному вигляді подана на рис. 3—33.
Незважаючи на велику різноманітність перетворювачів (датчиків), за їх будовою і принципом дії усіх їх можна поділити на дві основні групи: параметричні і генераторні.
У параметричних перетворювачах неелектрична величина змінює будь-який електричний або магнітний параметр: опір, ємність, індуктивність, магнітну проникність та ін.
У генераторних перетворювачах неелектрична величина зумовлює появу е. р. с., залежно від характеру збудження якої
перетворювачі поділяють на індукційні, термоелектричні, п’єзоелектричні та ін.
Розглянемо деякі типи перетворювачів і їх застосування для вимірювання неелектричних величин. Той самий перетворювач можна використати для вимірювання різних неелектричних величин, тому перетворювачі розглядають незалежно від останніх.
Припустимо, що треба виміряти на відстані температуру рідини. Для цього можна використати або параметричний датчик опору, або
Рис.
З—34.
Схема
індукційного перетворювача для
вимірювання рівнів рідин.
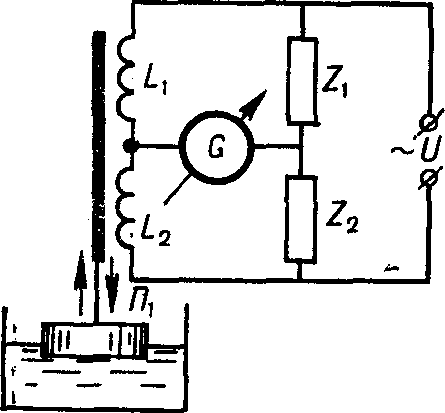
Для вимірювання різноманітних механічних величин широко застосовують індукційні перетворювачі (датчики). Принцип дії такого перетворювача грунтується на залежності індуктивності обмотки електромагніту змінного струму від положення рухомого якоря або сердечника, яке визначається вимірюваною механічною величиною. Для прикладу розглянемо принципову схему індукційного перетворювача з рухомим сердечником (рис. 3—34). Поплавок TI1 переміщує феромагнітний сердечник двох котушок електромагнітів, а це порушує рівновагу моста змінного струму. У діагоналі моста
з вимірювальним приладом виникає струм, величина якого залежить від переміщення сердечника. Вимірювальний прилад П градуюють для безпосереднього відліку рівня рідини.
Розділ IV ТРАНСФОРМАТОРИ
1. ЗАГАЛЬНІ ВІДОМОСТІ
Трансформатором називається статичний електромагнітний апарат, призначений для перетворення змінного струму однієї напруги в змінний струм іншої напруги при незмінній частоті.
Потреба в зміні напруги пояснюється тим, що основні споживачі на заводах (двигуни, індукційні печі тощо) розраховані на напругу 380 і 500 в, а споживачі в житлових будинках (радіоприймачі, телевізори, лампи освітлення тощо) — на 220 в, тоді як напруга генераторів на електростанціях становить
З, б, 10, 15 і 20 кв. У цьому випадку напругу генератора слід знизити знижувальним трансформатором. Крім того, при передаванні електричної енергії на відстань у проводах втрачається частина енергії, пропорційна Iі г. Щоб зменшити ці втрати, треба або зменшити опір проводів, збільшивши їх поперечний переріз, що є економічно невигідно, або зменшити струм /. Але для того щоб передавана потужність залишилася незмінною, треба підвищити напругу. У цьому разі застосовують підвищувальні трансформатори.
На сучасних лініях електропередач напругу підвищують трансформатори залежно від дальності передачі електроенергії до 35, 110, 220, 400, 500, 800 тис. вольтів і більше. У місцях споживання напругу знижують трансформаторами до потрібної величини.
Винайшов трансформатор з розімкненим магніто- проводом видатний російський винахідник-електротех- нік Павло Миколайович Яблочков (1876 p.). Такий трансформатор уперше був застосований для живлення дугових лампочок-свічок Яблочкова.
У 1882 р. препаратор кафедри фізики Московського університету Іван Пилипович Усагін (1855—1919 pp.) демонстрував удосконалений трансформатор із замкненим магнітопроводом, який також використовувався
для живлення свічок Яблочкова. Конструкцію трифазного трансформатора розробив видатний російський електротехнік М. О. До- ливо-Добровольський (1862—1919 pp.).
З винаходом трансформатора відкрилися шляхи для широкого використання енергії місцевих палив і гідроенергії. Перетворивши ці види енергії в електричну, передають її по високовольтних лініях на далекі відстані до споживачів. У зв’язку з інтенсивною електрифікацією країни виробництво трансформаторів в електромашинобудуванні займає провідне місце. Радянські вчені та інженери розробили багато досконалих конструкцій трансформаторів різних потужностей і напруг: від часток вольт-ампера і вольта до сотень тисяч кіловольт-амперів і сотень кіловольтів.
Усі трансформатори за призначенням поділяють на такі типи:
с и л о в і, які застосовуються при передаванні і розподіленні електроенергії для живлення силового і освітлювального навантаження;
вимірювальні, які застосовуються для живлення електровимірювальних приладів;
спеціальні, до яких належать зварювальні і випробувальні трансформатори, а також трансформатори для ртутних випрямлячів, медичних цілей та ін.
Отже, трансформатори застосовуються в багатьох галузях науки і техніки, відповідно до чого змінюються і їх конструктивні форми. Але в усіх випадках принцип дії трансформаторів залишається незмінним.
За кількістю фаз трансформатори поділяють на однофазні, трифазні і багатофазні. Найбільше поширені однофазні і трифазні трансформатори.
Залежно від способу охолодження, трансформатори бувають сухі (з повітряним охолодженням) і масляні (для охолодження застосовують трансформаторне масло).
За формою магнітопроводу трансформатори поділяють на с т е р- жневі і броньові.
2. БУДОВА І ПРИНЦИП ДІЇ СИЛОВИХ ТРАНСФОРМАТОРІВ
На рис. 4—1 зображено схему будови однофазного стержньового трансформатора. Він складається з замкненого стального сердеч- ника-магнітопроводу, на якому розміщені дві обмотки — низької напруги (HH) і високої напруги (BH). Вони електрично не сполучені і ізольовані між собою ізоляційним циліндром (ІЦ). Частина магнітопроводу, на якому розміщені обмотки, називається стержнем (C), а без обмотки — якорем (Я). Обмотка, до якої електрична енергія підводиться з сітки, називається первинною; друга обмотка, до якої приєднують споживачів енергії, називається вторинною. На кожному стержні магнітопроводу розміщено по половині первинної і вторинної обмоток. Обидві половини тієї самої обмотки сполучені
між собою так, щоб їх магнітні потоки додавалися. Для кращого магнітного зв’язку первинна і вторинна обмотки розміщені концентрично одна на одній. Обмотка низької напруги розміщена ближче до стержня.
-Ф-Я-Ф-
•ф-
■ф-
І
ф
1
і
ф
ф
і
ф
C
і,
C
ф
і
ф
І
$
-.--J
і
ф
-ф-
-ф-
■-Ф-Я-Ф-
HH
BH

Рис.
4—1.
Однофазний
стержньовий трансформатор з
концентричною обмоткою.
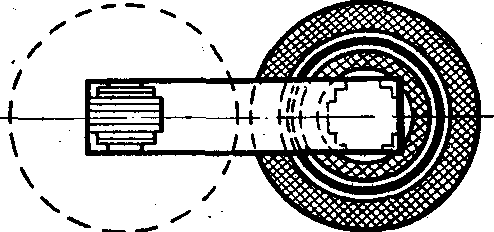
Щоб зменшити втрати на вихрові струми, магнітопровід складають з листів трансформаторної сталі товщиною 0,35 або '0,5 мм. Листи ізолюють один від одного тонким папером або лаком. Стержень маг- нітопроводу має квадратний або хрестовидний переріз, а в потужніших трансформаторах — ступінчастий. Форма ярма подібна
до форми сердечника.
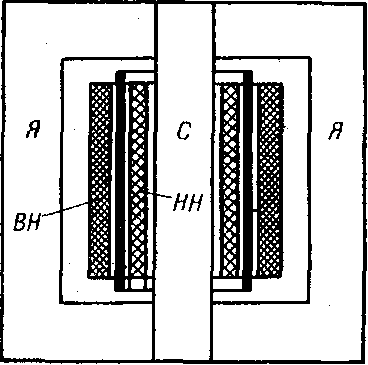 Листи
магнітопроводу складають впритул і
внапустку. За першим способом стержні
і ярма складають окремо, а потім пресують
і кріплять стяжними болтами. Між стержнями
і ярмами кладуть ізолюючі прокладки,
щоб запобігти замиканню кола вихровими
струмами. За другим способом (внапустку)
листи сердечників і ярем накладають
один на один, як зображено на рис. 4—3.
Листи
магнітопроводу складають впритул і
внапустку. За першим способом стержні
і ярма складають окремо, а потім пресують
і кріплять стяжними болтами. Між стержнями
і ярмами кладуть ізолюючі прокладки,
щоб запобігти замиканню кола вихровими
струмами. За другим способом (внапустку)
листи сердечників і ярем накладають
один на один, як зображено на рис. 4—3.
Рис.
4—2.
Броньовий
трансформатор.
т|)Шіа|ю|)мггго|)іи найчастіше використовують так звану переміжну обмотку (рис. 4—4).
Якщо обмотки трансформатора охолоджуються маслом, то сердечник з обмотками поміщають у стальний бак, заповнений мінеральним трансформаторним маслом, яке не тільки охолоджує, а й надійно ізолює обмотки одну від одної і від бака.
Рис.
4—3.
Збирання
листів магнітопроводу внапусток.
Обидві обмотки знижувальних трифазних силових трансформаторів сполучають зіркою. Початки обмоток через ізолятори 8 і 9 виводять назовні. Нарис. 4—5, а видно чотири низьковольтних прохідних ізолятори: три ізолятори є виводами трьох фаз, а четвертий — виводом нульової точки, яка надійно заземлюється. Таке сполучення обмоток зірка — зірка з виведеною нульовою точкою позначають Υ/Υ0·
туттнн
ий&йяйяй·
BH


![]()
HH
BH![]()

нн
iasasssgasr
шшшнн
Рис.
4—4.
Переміжна
обмотка трансформатора.


![]()
Зверху, над кришкою трансформатора, розміщено бачок-розши- рювач 5, який маслопроводом сполучається з кожухом. Маслом заповнюють весь кожух трансформатора і розширювач до відпопідної позначки-покажчика рівня масла 13, який зверху і знизу з’єднаний патрубками з бачком розширювача. При зменшенні об’єму масла в баці трансформатора внаслідок його нагрівання рештки масла переходять у розширювач, а при недостачі масло надходить з розширювача. Для контролю за температурою масла в кришці бака
Рис.
4—5.
Силовий
трифазний трансформатор типу TM.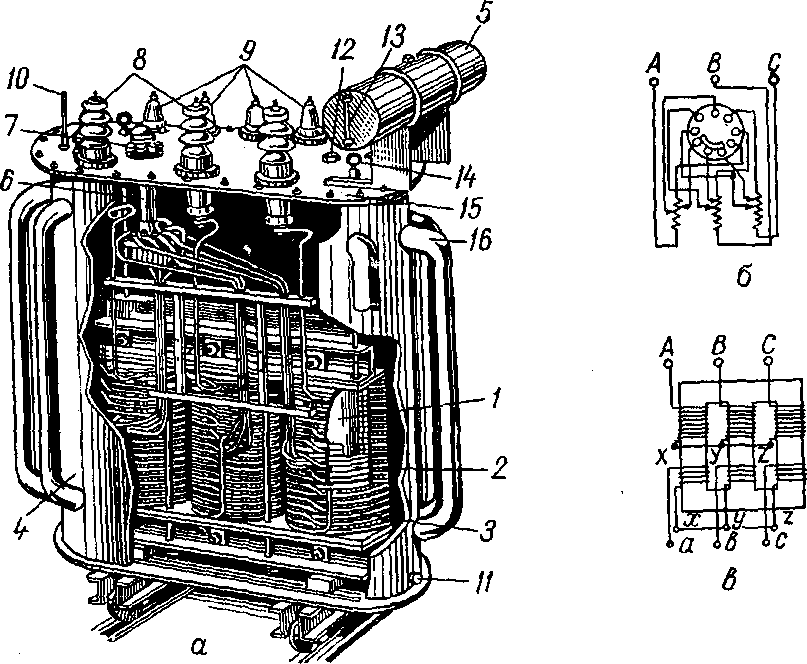
встановлено ртутний термометр 10. Термометр може мати контакти, які замикаються ртуттю при температурі масла вище 95° C і вмикають звуковий сигнал. Зливають масло через отвір, закритий пробкою 11.
Щоб масло краще охолоджувалося, кожух трансформатора 4 має радіатори 16, виготовлені з стальних труб, приварених до стінок кожуха.
Прохідні ізолятори, які використовуються в трансформаторах, можуть бути суцільними фарфоровими, фарфоровими з повітряним або масляним заповненням тощо.
Ізолятори для установок на відкритому повітрі мають ребра для збільшення шляху поверхневого розряду. Ізолятори для установок, які розміщують у приміщеннях, ребер не мають.
На кожусі трансформатора прикріплюють паспорт трансформатора, на якому є основні технічні дані трансформатора: номінальна потужність у кіловольт-амперах, номінальна напруга первинної обмотки, напруга на затискачах вторинної обмотки при холостому ході трансформатора і номінальній напрузі на первинній обмотці, номінальні струми обмоток, група сполучення обмоток, (Υ/Υ„ —12 або Y /А—11), напруга короткого замикання Uk і номінальна частота.
У маркіровці трансфоматорів буква T або 0 відповідає трифазному або однофазному трансформатору, буква M або C — масляному або сухому, чисельник числового позначення визначає потужність у кіловольт-амперах, знаменник — найвищу напругу в кіловольтах. Трансформатори з алюмінієвою обмоткою маркірують
A
1O
(
',7
д ]
H
a
0—* П
І-
U1
W1
j!
I'
Ij
α
I
-L I
I
U-
X
I Г
:!*■
Jf1-
:ι
-h
-Г
+ J
I
1
U2
E-2
X
X
j
LI
'
Рис.
4—6.
Схема
трансформатора при холостому ході.
TMA 20/6 (трифазний, масляний, з алюмінієвою обмоткою, потужністю 20 кв а на 6 кв). Трансформатори на напругу до 500 в випускають сухого типу.
Принцип дії трансформатора грунтується на законі електромагнітної індукції. Слід пам’ятати, що трансформатор не є джерелом електроенергії. Електрична енергія надходить з електромережі (від генератора) в первинну обмотку трансформатора, в якій перетворюється в енергію магнітного поля, яка переходить по сердечнику трансформатора до вторинної обмотки, де вона перетворюється знову в електричну енергію, яка вже й надходить до споживачів.
Для посилення електромагнітного зв’язку між контурами первинної і вторинної обмоток їх розміщують на спільному стальному сердечнику (рис. 4—6).
Якщо до затискачів первинної обмотки AX підвести змінну напругу сітки U1, то при проходженні змінного струму по первинній обмотці в стальному сердечнику виникає змінний магнітний потік Ф.
Магнітний потік Ф, пронизуючи первинну і вторинну обмотки, згідно з законом електромагнітної індукції індукує в кожному витку первинної і вторинної обмоток однакову щодо величини е. р. с. Якщо число витків вторинної обмотки буде менше від числа витків первинної обмотки, то сумарна е.р.с., індукована у вторин
ній обмотці, у стільки разів буде меншою за е. р. с. повинної обмотки, у скільки число витків у ній менше за число витків у первинній обмотці.
Таким чином, відношення е. р. с., індукованих в обмотках, дорівнюватиме відношенню числа їх витків: = —, де E1 і E2 —
•С 2
діючі значення е. р. с. первинної і вторинної обмоток; Qy1 і — кількість витків первинної і вторинної обмоток.
При холостому ході (вторинна обмотка не навантажена) е. р. с. первинної обмотки E1 приблизно дорівнює напрузі на затискачах первинної обмотки U1, оскільки падіння напруги в ній при холостому ході мале. E. р. с. вторинної обмотки E2 дорівнює напрузі U02. Тому при холостому ході відношення е. р. с. можна замінити відношенням напруг на затискачах обмоток трансформатора U1 і U02:
£
_
Ei
_
£
і
w,
Е,
Це відношення називається коефіцієнтом т р а н с ф о р- м а ц і ї трансформатора.
4—3. ХОЛОСТИЙ ХІД ОДНОФАЗНОГО ТРАНСФОРМАТОРА
Під холостим ходом трансформатора розуміють такий режим його роботи, при якому до первинної обмотки підводиться номінальна напруга, а вторинна обмотка розімкнена (рис. 4—6).
•рансфор-


то по об- и' \ , у
о ходу I0. \° '
гік, біль- J. ,
/п ї
ТЛ PTO ITl. _ w
-E1
ф
V
Коли до первинної обмотки трансформатора подати змінну напругу, то по об- мотці піде змінний струм холостого Цей струм створює магнітний потік ша частина якого замикається по сталь ному сердечнику, перетинаючи обидві обмотки трансформатора. Цю частину магнітного потоку називають основним потоком Ф. Незначна частина магнітного потоку замикається, по повітрю, перетинаючи тільки первинну обмотку, і не бере участі в індукуванні е. р. с. у вторинній обмотці. Цей потік називається потоком розсіювання Ф61.. - Векторна діаграма трансформатора при холостому ході подана на рис. 4—7.
Е,
Рис.
4—7.
Векторна
діаграма холостого ходу трансформатора.
= 4,44 α>χ/Φ, E2 = 4,44 ш2/Ф.
E. p. с. і E2 відстає від потоку на кут п/2. Потік розсіювання Фп збігається за фазою із струмом холостого ходу I0, тому що магнітний опір для нього визначається опором шляху потоку по повітрю, де немає впливу гістерезису і вихрових струмів. Потік розсіювання індукує в первинній обмотці е. р. с. розсіювання Esl, яка відстає по фазі на л/2 від цього потоку і зрівноважується падінням напруги на індуктивному опорі первинної обмотки I0X1.
Напруга, прикладена до первинної обмотки трансформатора, складається з: а) напруги, яка зрівноважує зворотну е. p. с. .E1, що дорівнює їй і протилежна за напрямом. На векторній діаграмі вона позначена — E1; б) спаду напруги на активному опорі первинної обмотки I0rlt що збігається за фазою з струмом I0; в) спаду напруги на індуктивному опорі первинної обмотки I0X1, що зрівноважує е. р. с. розсіювання Esl. Ця складова випереджає струм I0 на 90°. Отже, маємо:
U1 = — E1 -\- I0T1 1,X1. (4—2)
Величина Z1 = Vі\ + X1 — повний опір первинної обмотки трансформатора.
4. РОБОТА ТРАНСФОРМАТОРА ПРИ НАВАНТАЖЕННІ
Якщо до первинної обмотки трансформатора підвести напругу U1 (рис. 4—8), а вторинну обмотку замкнути на будь-який опір навантаження Zh, то під дією індукованої е. p. с. E2 в колі вторинної обмотки потече струм навантаження /2, який створить свої магнітні
•if
й G
і
І '
ї
**
&— H
г -U1
£, 1' *- .і:
ч
іТТ
[*»
*«!' і f
Iw-
ч
ill t
{
E2
U2
N
Zh J T
І
T
т
—fcj
І У
Рис.
4—8.
Схема
навантаженого трансформатора.
ПОТОКИ Ф2 і Ф82· Тому що потоки Фх і Ф2 проходять по спільному магнітопроводу, вони створюють результуючий потік Ф, який дорівнює геометпичній сумі потоків Фх і Ф2, бо вони зсунуті за фазою:
Ф = (J)1 + ф2. (4—3)
Отже, у навантаженому трансформаторі є три потоки: основний потік Ф, який наводить у кожній з обмоток е. р. с. E1 і E2, щовід-
стають за фазою від потоку Ф на π/2, і два потоки розсіювання в первинній Ф81 і вторинній Фд2 обмотках. Останні два потоки замикаються навколо своїх обмоток в основному по повітрю і тому збігаються за фазою з відповідними струмами I1 і I2, бо явища гістерезису в цьому випадку немає.
Рис.
4—9.
Векторна
діаграма трансформатора при
активно-індуктивному навантаженні.
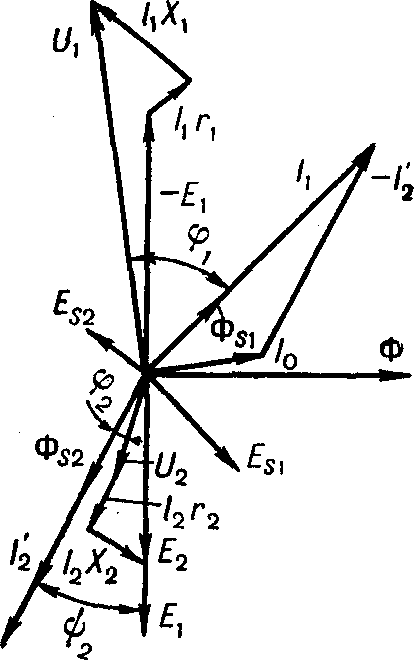
Xsi === COLsl = 27с/
Xs2 = = 2 TzfLs2, (4~4)
За другим законом Кірхгофа для первинної і вторинної обмоток навантаженого трансформатора можна написати рівняння;
U1= — E1 -j- IiT1 -f- I1Xsi',
U2 = E2 ^2T2 IzXs2· (4—5)
Роботу трансформатора при навантаженні найкраще вивчати за векторною діаграмою (рис. 4—9). Струм /2 у вторинній обмотці створює намагнічуючу силу (н. с.) IiWi, а струм I1 — намагнічуючу силу I1W1. Згідно з правилом Ленца I2W2 діє протилежно намагнічуючій силі I1W1.
Інакше кажучи, якщо струм первинної обмотки I1 намагнічує трансформатор, то струм вторинної обмотки
I2 його розмагнічує. Якщо знехтувати незначним спадом напруги на первинній обмотці трансформатора, то можна написати рівняння:
(4-6)
Оскільки величини 4,44 fwx сталі, то можна сказати, що при сталій напрузі U1 і частоті сітки f величина магнітного потоку Ф при будь-якому навантаженні буде сталою, тому н. с. трансформатора при холостому ході (I2 = 0) і навантаженні (/2>0) будуть однакові, тобто
(4_7)
I0W1 = I1W1 + I2W2.
Поділивши обидві частини рівняння на W1, дістанемо:
(4-8)
де
K
= I2
wI
струм
вторинної обмотки, зведений до первинної.


З рівняння (4—8) маємо:
/і = 7» +(-/I), (4-9)
тобто струм у первинній обмотці трансформатора дорівнює геометричній сумі намагнічуючого струму I0 і складової (—I2), яка компенсує розмагнічуючу дію струму вторинної обмотки.
Векторну діаграму навантаженого трансформатора будують у такій послідовності:
Горизонтально відкладають вектор магнітного потоку Ф.
Під кутом магнітного запізнення δ відкладають струм холостого ходу I0.
Під кутом 90° униз від вектора Ф внаслідок відставання за фазою відкладають у відповідному масштабі е. p. с. E1 і E2.
Під кутом ψ2 відносно вектора Ei відкладають вектор вторинного струму Z2 (при активно-індуктивному навантаженні), величина якого визначається за формулою
/^-^4- І! , (4-10)
У*2, + ** Уя* + х·
де R2 і X2 — сумарні активний і реактивний опори вторинної обмотки трансформатора і споживача.
Зсув фаз між вторинним струмом I2 і е. p. с. E2 визначається за формулою:
ψ2 = arctg . (4-11)
Згідно з рівнянням (4—9) знаходять струм I1 у первинній обмотці, для чого до струму намагнічування I0 до-
• · <« T * T ^2
дають у зворотному напрямі вториннии струм I2 = I2 — .
W·і
У напрямі струмів I1 і I2 відкладають магнітні потоки розсіювання Фв1 і Ф82 .
Під кутом 90° (відставання за фазою) від векторів Ф81 і Ф62 відкладають е. р. с. розсіювання Esl і Es2.
До кінця вектора E2 добудовують трикутник спадів напруг 12г2 і I2X2. Вектор активного спаду напруги І2г2 спрямовують паралельно струму I2, а вектор реактивного спаду напруги I2X2 — перпендикулярно до I2.
До зворотної первинної е. р. с. E1 добудовують трикутник спадів напруг на опорах первинної обмотки (активний Іхгх — в напрямі струму I1, а реактивний I1X1 — перпендикулярно до струму I1).
При збільшенні струму навантаження на AZ2 в трансформаторі виникають такі електромагнітні процеси:
Потік Ф2 зростає на ДФ2.
Потік Ф зменшується на ΔΦ2, оскільки струми I1 і I2 (див. векторну діаграму рис. 4—9) зміщені майже на 180°. Тому результуючий потік Ф можна визначити за формулою: Ф^^ — Ф2.
Е. р. с. E1 і E2 зменшуються на AE.
Струм I1 збільшується на ΔI1.
Потік Фг збільшується на величину ΔΦΧ, яка майже дорівнює ΔΦ2.
Е. р. с. E1 і E2 зростають до попередніх значень.
Додаткові магнітні потоки ΔΦΧ і ΔΦ2 повністю компенсуються, а результуючий потік Ф залишається майже незмінним.
Таким чином, з мережі весь час автоматично надходить у первинну обмотку така кількість енергії (не враховуючи втрат), яка споживається на вторинній обмотці.
5. ЗМІНА ВТОРИННОЇ НАПРУГИ ТРАНСФОРМАТОРА ПРИ ЗМІНІ НАВАНТАЖЕННЯ
При зміні навантаження трансформатора напруга U2 не залишається сталою, вона змінюється залежно від величини струму і характеру навантаження. Ця залежність U2 = /(/2) називається зовнішньою характеристикою трансформатора.
Розглядаючи вплив навантаження на вторинну напругу трансформатора, знехтуємо струмом холостого ходу і спростимо векторну діаграму. Для цього всі вторинні величини зводимо до первинного кола. За формулою 4—1 і 4—8 (для знижувального трансформатора) знаходимо:
K = »£, = *£, = £,;
,· _а,-J.,-, (4-,2)
-W12- k І2 - 'і'
Зведені опори вторинної обмотки, виходячи з рівності потужностей втрат, знаходимо за такими формулами:
r212 2 = г2Р2, г2 = г2 = kW, X’, = k‘Xa. (4-13)
Тепер повернемо всі зведені величини на 180° в площині рис.
10, а (е. р. с. розсіювання і потоки для спрощення діаграми на рисунку не зображено). He враховуючи відносно невеликого струму холостого ходу /0, матимемо збіг векторів струму I2 і I1, тобто /2 = I1.
Активні та індуктивні опори обох обмоток можна об’єднати такою залежністю:
T1jTr2 =rft, Xi + X2 = (4—14)
де rh і Xk — спільні активні та індуктивні опори обох обмоток зведеного трансформатора.
Після такої заміни векторна діаграма матиме вигляд, наведений на рис. 4—10, б.
При холостому ході зведена напруга вторинної обмотки трансформатора U102 = U1, а при навантаженні напруга на затискачах вторинної обмотки трансформатора знижується до величини U12 внаслідок збільшення спаду напруг на опорах обох обмоток трансформатора. Зміна зведеної вторинної напруги AU дорівнює різниці між його значеннями при холостому ході і навантаженні, тобто
AU=W02- U2 =U1- U2. (4-15)
Оскільки кут Θ між векторами U1 і U2 (рис. 4—10,6) дуже малий, можна вважати, що AU дорівнює сумі відрізків ab і Ьс.
З рис. 4—10,6 маємо: a b = Urcos φ2; be = ^sinf2, Де Ur = = I1Tfr Ul = I1Xk] тоді AU = Ur cos φ2 + Ul sin ψ2.
Відносна процентна зміна напруги буде:
MI Uf COS Ф» + Ur sin φ»
AU % = “f 100% = IiZ_i Г . 100% =
U1 U1
= (r* cos ъ +£k sin φ2) ·. її . 100 %, (4—16)
де Ur — спад напруги на активному опорі обмоток трансформатора в процентах від UH; Ul — спад напруги на індуктивному опорі обмоток трансформатора в процентах від Uh; cos φ2 — коефіцієнт потужності в мережі, яка живиться від трансформатора.
У трансформаторах відносно великої потужності (десятки кіловольт-амперів і більше) індуктивний спад напруги звичайно в декілька разів перевищує активний спад напруги. Тому у формулі
Рис.
4—10.
Спрощена
векторна діаграма трансформатора.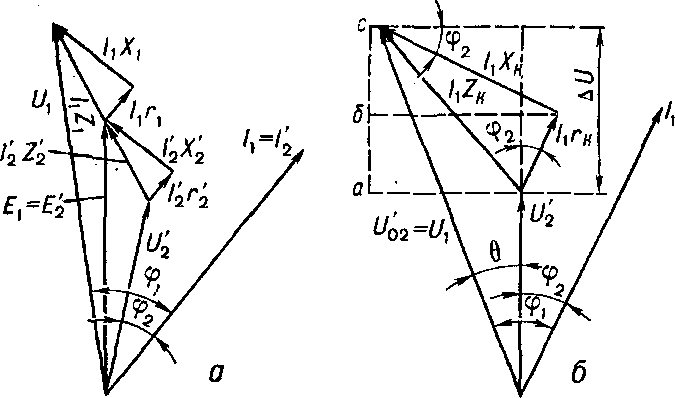
(4—16) при φ2 Φ O другий доданок буде більший за перший. Внаслідок цього зміна напруги збільшується із збільшенням кута зсуву фаз φζ. Таким чином, реактивне навантаження спричинює більшу зміну напруги, ніж активне навантаження (рис. 4—11, а).
У трансформаторах невеликої потужності (одиниці кіловольт- амперів і менше) активний спад напруги звичайно більший, ніж реактивний. Тому в цьому випадку із зменшенням cos φ2 зовнішня характеристика проходить вище (рис. 4—11, б).
Зміну напруги трансформатора можна визначити також із зовнішньої характеристики трансформатора (рис. 4—11) за формулою
Ш % = ■ 100 %. (4-17)
^02

![]() Для
сучасних трансформаторів процентна
зміна напруги лежить у межах 2—4%.
Для
сучасних трансформаторів процентна
зміна напруги лежить у межах 2—4%.
со scp =0,5 coscp=7
І і2 і і2
а б
Рис. 4—11. Зовнішні характеристики трансформатора: а—великої потужності: б — малої потужності.
У стандартах на трансформатори нормується не зміна напруги, яка буде різною для різних cos φ2, а напруга короткого замикання UK.3 (див. § 4—6).
Величину напруги короткого замикання трансформатора звичайно визначають у процентах від номінальної напруги, яка для сучасних трансформаторів становить 5—10% від Uih і позначається на паспорті трансформатора.
6. ВТРАТИ ПОТУЖНОСТІ І к. К. Д. ТРАНСФОРМАТОРА
Трансформатори, на відміну від двигунів та інших приймачів енергії, нормують не за активною, а за повною потужністю S, яку позначають на паспорті трансформатора в кіловольт-амперах (κβ'ά):
Sih = U ін І Ін·
Розміри трансформатора при сталій частоті визначають в основному двома величинами — номінальним струмом і номінальною напругою. За номінальним струмом (допустимий по нагріву) розраховують поперечний переріз проводів обмоток трансформатора. Від величини напруги залежить магнітний потік Фт =
= -ξ-щ— , а отже, і розміри магнітопроводу трансформатора.
Активна потужність трансформатора пропорційна коефіцієнту потужності Piti = Si„cos ψ!· Вона залежить від кута Ip1, а отже, і від кута φ2, тобто від властивостей споживача, і тому не може характеризувати розміри трансформатора.
Проте втрати і к. к. д. трансформатора залежать від активних потужностей. Втрати в трансформаторі дорівнюють різниці потужностей первинної і вторинної обмоток:
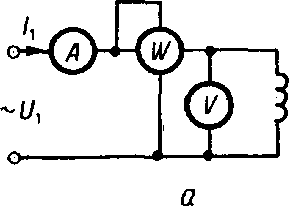 P-P1
—
P2
= U1I1
cos Cp1
—
U2Ii
cos φ2. (4—18)
P-P1
—
P2
= U1I1
cos Cp1
—
U2Ii
cos φ2. (4—18)
Рис.
4—12.
Визначення
втрат в міді і сталі: а
— схема досліду холостого ходу; б—
схема досліду короткого замикання.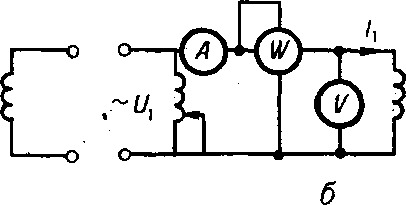
Втрати в трансформаторі складаються з втрат у міді і сталі: P = Pm +Pcm- (4-19)
Втрати в міді — це втрати на нагрівання обмоток трансформатора струмами навантаження:
Pm — Р\м + PiM = I1I"! + Z^r2J (4—20)
де T1 і г2 — активні опори обмоток.
Якщо вважати, що порівняно незначний струм холостого ходу дорівнює нулю I0 = 0, то /2 ~ /χί тоді з рівняння (4—20) дістанемо:
Pm^= Ilr1 + /2 k2r2 = I1T1 + 1^2 = /j (/-! -f r 2) = Iirk . (4—21)
З рівняння (4—21) видно, що втрати в міді пропорційні квадрату струму навантаження. Отже, із зміною струму навантаження втрати в міді змінюватимуться, тому їх називають змінними. На практиці втрати в міді визначають з досліду короткого замикання (рис. 4—12, б). Дослід короткого замикання проводять при накоротко
замкненій вторинній обмотці (U2 = 0); при цьому до первинної обмотки підводять знижену напругу короткого замикання U1 = UK.S, під впливом якої в первинному і вторинному колах трансформатора встановлюються номінальні струми Ii = І1Н і I2 = Ігн. У цьому випадку для трансформатора штучно створюється режим, який відповідає за струмом навантаження номінальному режиму. Вважають, що потужність (при досліджуванні короткого замикання), споживана трансформатором, дорівнює втратам енергії на нагрівання міді обмоток при номінальному навантаженні трансформатора. Відносно малими втратами в сталі в цьому разі нехтують:
рк. S=Pm. (4-22)
Втрати в сталі Pcm, або магнітні втрати,— це втрати на гістерезис і вихрові струми в стальному сердечнику:
Pcm = Pe +P в.C (4-23)
З емпіричних формул визначаємо, що втрати на гістерезис і вихрові струми пропорційні квадрату магнітної індукції або квадрату магнітного потоку
Pcm=B В* або Яв.с = Ф2, (4—24)
а потік пропорційний прикладеній напрузі U1, тому:
Pcm = и\. (4-25)
Таким чином, втрати в сталі пропорційні квадрату прикладеної напруги і не залежать від навантаження, а тому вони є сталими втратами трансформатора.
На практиці втрати в сталі визначають експериментально з досліду холостого ходу (рис. 4—12, а).
Цей дослід проводять при розімкненій вторинній обмотці (I2 =0) і номінальній первинній напрузі U1 = U1h.
У цьому досліді P2 = 0, а тому ватметр, увімкнений у первинне коло, вимірює втрати холостого ходу. Оскільки при холостому ході втрати в міді майже дорівнюють нулю, то втрати холостого ходу є втратами в сталі:
рх. х =Pcm- (4-26)
Знайдені втрати в міді і сталі відповідають номінальному (паспортному) навантаженню трансформатора. Втрати холостого ходу залишаються тими самими і при часткових навантаженнях. Втрати в міді при збільшенні навантаження збільшуватимуться пропорційно квадрату коефіцієнта навантаження:
де α — відношення дійсного струму навантаження до номінального:
V
а
=
Pmh — втрати в міді при номінальному навантаженні трансформатора.
Корисна потужність трансформатора, якщо врахувати його завантаження, дорівнюватиме:
(4-29)
це
відношення корисної потужності
Pl
P
2
=
1
(4-30)
Pi
P
4- P
M
~
гс,


Якщо врахувати ступінь завантаження трансформатора, то к. к. д. визначатиметься за такою рівністю:
,
(4—31)
aSh
COS φ2
+
а*Рмн
+
Ρχ

Р*+Рм + Рап
Рис.
4—13.
Втрати
і к. к. д. трансформатора в залежності
від навантаження.
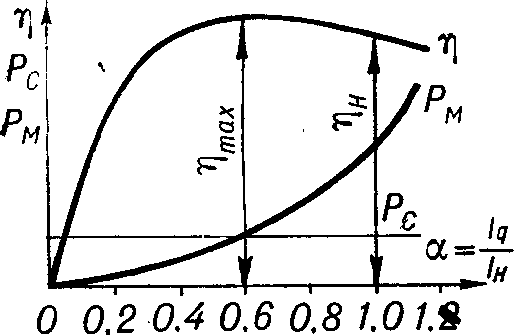
Залежність к. к. д. і втрат у трансформаторі від навантаження зображена на рис. 4—13. При холостому ході P2 = 0 і η = 0. Із збільшенням навантаження к. к. д. зростає до свого максимального значення, після чого зменшується. Зменшення Κ. к. д. пояснюється збільшенням втрат в обмотках, які зростають пропорційно квадрату струму.
Аналіз рівняння (4—31) показує, що максимальний к. к. д. утворюється, коли втрати в сталі і міді (Pm= Рст) однакові. Це може бути при умові, що а = 0,5—0,6.
Номінальне значення к. к. д. η„ внаслідок відсутності обертових деталей дуже високе і лежить у межах 98—99% для великих трансформаторів, а в трансформаторах малої потужності — 50—70%.
Перетворення електричної енергії трифазного струму ОДНІЄЇ напруги в енергію трифазного струму іншої напруги можна виконати двома способами: а) за допомогою трьох однотипних однофазних трансформаторів (рис. 4—14, а); б) за допомогою одного трифазного трансформатора (рис. 4—14, б).
Трифазні (тристержньові) трансформатори виконують середньої і малої потужності, а групу з трьох однофазних трансформаторів застосовують при великих потужностях.
AX BY CZ AXBYCZ
а
хЬ ус і б
Рис.
4—14.
Способи
трансформування трифазного струму; а
—
трьома однофазними трансформаторами;
б — одним трифазним трансформатором.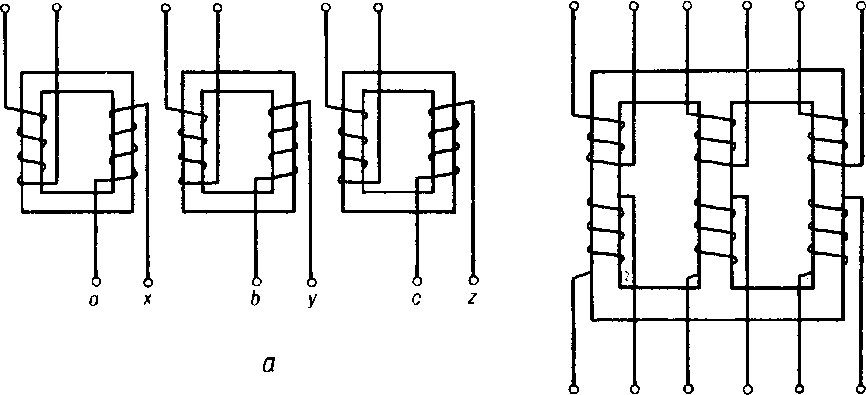
Кінці первинної обмотки сполучають між собою зіркою або трикутником. Так само сполучають і кінці вторинної обмотки. Отже, може бути чотири основних варіанти сполучень: зірка — зірка (Y/Y); зірка — трикутник (Υ/Δ); трикутник — трикутник (Д/Δ); трикутник — зірка (Δ/Υ)·
В CPCP застосовують три основні схеми сполучення: Y/Y0, Υ/Δ і Υο/Δ, де чисельник означає схему сполучення обмоток високої напруги, а знаменник — схему сполучення обмоток низької напруги.
Для трансформаторів невеликої потужності напругою 10/0,4 і 6/0,4 кв застосовують групи сполучення обмоток Υ/Υ0, бо на стороні низької напруги треба мати виведену нульову точку.
Сполучати обмотки зіркою слід при високих напругах, оскільки фазна напруга в У~3 раз менша за лінійну, що дає можливість зменшити вимоги до ізоляції обмотки.
Сполучення трикутником застосовують при низьких напругах і великих струмах, що дає можливість зменшити переріз проводів обмоток, оскільки в цьому разі фазний струм у проводах обмотки менший у У~3 раз за лінійний струм.
На щитку трансформаторів зазначено не тільки спосіб сполучення обмоток, а й умовні позначення групи сполучення обмоток трансформаторів, наприклад: Y/Y0—12 або Υ/Δ— П.
Розглянемо два види сполучення обмоток Υ/Υ і Υ/Δ і накреслимо векторні діаграми для цих випадків (рис. 4—15, а і б). При побудові векторних діаграм виходять з таких загальних міркувань:
A
S C ^-'2
а
а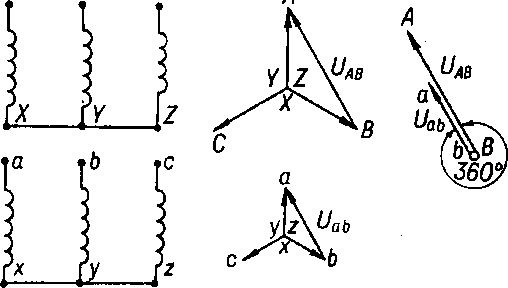
Va-U
Рис.
4—15.
Визначення
групи з’єднання обмоток трансформатора
за допомогою векторної діаграми: а
— при з’єднанні обмоток Y/Y
—
12;
б
— при з’єданні обмоток Y
/Δ
—
II-
б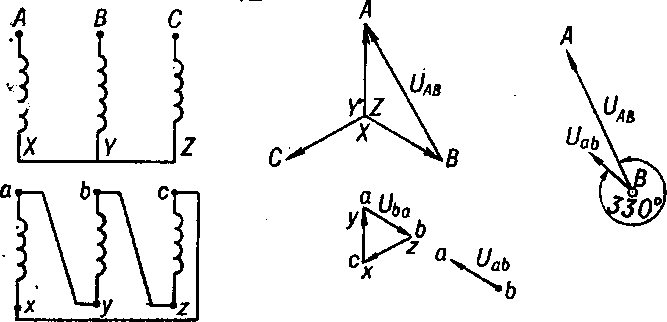
Вектори фазних напруг обох обмоток однієї фази паралельні, тому що індукуються одним магнітним потоком, і при узгодженому вмиканні обмоток спрямовані в одну сторону, а при їх зустрічному вмиканні — в різні сторони. При узгодженому вмиканні обидві обмотки намотані в один бік; можна верхні затискачі вважати за початки, а нижні — за кінці. Щоб було зустрічне вмикання обмоток, досить поміняти місцями затискачі первинної або вторинної обмотки.
Якщо на схемі кінці фазних обмоток сполучені в одній точці, то на векторній діаграмі вектори фазних напруг цих обмоток також сполучатимуться в одній точці.
На векторній діаграмі (рис. 4—15, а) зсув фаз між первинними і вторинними лінійними напругами дорівнює нулю.
Кут зсуву фаз між напругами умовились позначати, користуючись годинниковим способом позначення кута. Для цього вектор Uab первинної лінійної напруги вважають за велику стрілку годинника і встановлюють проти цифри 12 годинникового циферблата, а вектор Uae вторинної лінійної напруги вважають за малу стрілку годинника і встановлюють на циферблаті відповідно до схеми сполучення (в нашому випадку — проти цифри 12). За одиницю кутового зміщення взято кут 30°, що відповідає куту між двома сусідніми цифрами годинникового циферблата. Отже, для нашої схеми (рис. 4—15,а) кут зсуву між стрілками годинника дорівнює нулю. Цифра 12 і визначає групу, до якої в цьому випадку належить трансформатор.
Визначимо групу сполучень обмоток трансформатора, сполучених за схемою (рис. 4—15, б) Υ/Δ, побудувавши векторну діаграму для обмотки низької напруги. Вектори фазних напруг обмоток високої і низької напруги паралельні і при узгодженому вмиканні спрямовані в одну сторону; тому вектор фазної напруги обмотки низької напруги ах проводимо паралельно вектору фазної напруги обмотки вищої напруги АХ. Оскільки на схемі сполучення обмоток точка а і у сполучені, то вони повинні сполучатись і на векторній діаграмі. Вектор by з точки у проводимо паралельно вектору ВУ. Вектор сг проводимо паралельно вектору CZ . Дістаємо трикутник фазних.і лінійних напруг обмотки низької напруги. Щоб визначити групу сполучень обмоток, вектор ab переносимо до вектора AB, сполучаючи точки b і В. Відраховуючи за стрілкою годинника кут між векторами AB і ab, знаходимо, що кут між ними дорівнює 330°, тобто 11 X 30°. Це означає, що ми маємо 11 групу сполучення обмоток.
Отже, група сполучення обмоток трансформаторів показує зсув фаз між високою і низькою лінійними напругами. Групу сполучення трансформаторів треба знати при вмиканні їх на паралельну роботу.
Процеси, що відбуваються в кожній фазі трифазного трансформатора, нічим не відрізняються від процесів в однофазному трансформаторі.
Коефіцієнт трансформації визначається через лінійні напруги і позначається на щитку трансформатора k = .
ил2
8. ПАРАЛЕЛЬНА РОБОТА ТРАНСФОРМАТОРІВ
Паралельною роботою називається робота двох або більше трансформаторів на спільні шини, коли їх первинні обмотки приєднані до загальної первинної, а вторинні — до загальної вторинної сітки (рис. 4—16).
Паралельне вмикання трансформаторів застосовують при змінному графіку навантаження підстанції. При найменшому наван
таженні працює тільки один трансформатор, а при збільшенні навантаження вмикають інші трансформатори. Це значно зменшує втрати енергії і підвищує к. к. д. підстанції.
X,
A2
X2
—®—


а
Для нормальної паралельної роботи однофазних трансформаторів слід додержувати таких вимог:
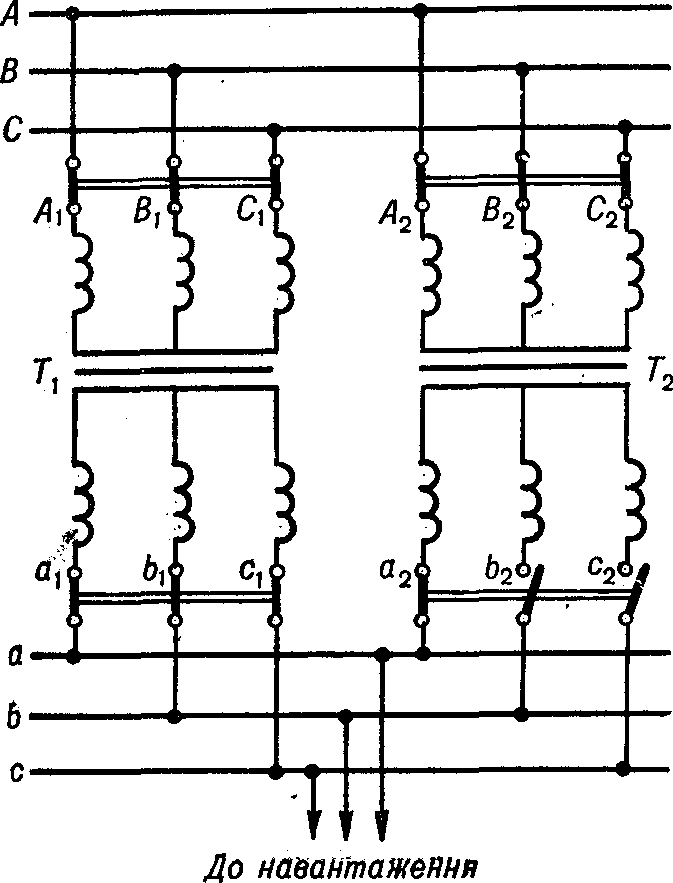
Рис. 4—16. Паралельна робота трансформаторів: а — еднофазних; б — трифазних.
Номінальні первинні і вторинні напруги трансформаторів повинні дорівнювати: Uu -Uuj — ···· =Uu, U21 = = U2іі_ = ... = U2n, а отже, коефіцієнти трансформації повинні дорівнювати: ki — = kn = ■ ■ ■ — kn.Напруги короткого замикання трансформаторів повинні дорівнювати: Uk і = =Ukїї = · · · = Ukn.
При сполученні вторинних обмоток трансформаторів треба сполучати затискачі з однаковими потенціалами, тобто вторинні напруги повинні збігатися за фазою відносно зовнішнього кола, ή відносно внутрішнього кола вони повинні бути зсунуті на 180°.
Рубильник P (рис. 4—16,а) можна вмикати лише тоді, коли стрілка вольтметра стоїть на нулі. Крім того, рекомендується, щоб відношення потужностей трансформаторів не перевищувало 3:1.
Припустимо, що два трансформатори однакової потужності, які мають різні коефіцієнти трансформації, увімкнені на паралельну роботу. При цьому вважаємо, що друга вимога паралельного вмикання додержана. Якщо ki < ku, то під впливом різниці е. р. с. AE = En—E3U по обмотках трансфоматорів потече зрівнюваль- ний струм Ізр, тому що обидві обмотки магнітно зв’язані між собою. Оскільки повні опори трансформаторів дуже малі, то навіть при невеликій різниці в коефіцієнтах трансформації під впливом AE
зрівнювальний струм може бути таким великим, що нормальна робота буде неможливою. На практиці допускають різницю в коефіцієнтах трансформації не більш як 0,5%.
Якщо перша вимога паралельної роботи трансформаторів додержана, тобто k\ = ku, а друга порушена, припустимо, t/Kl > Uku, то при навантаженні кожного трансформатора окремо номінальним струмом перший трансформатор матиме більший спад напруги, ніж другий (рис. 4—17, а). Внаслідок цього зовнішня характеристика першого трансформатора буде нижча за зовнішню характеристику другого трансформатора. Якщо ввімкнемо трансформатори паралельно, то вторинна напруга в них буде однаковою, але трансформатори будуть навантажені неоднаково, тобто перший буде недовантажений, а другий — перевантажений (рис. 4—17, б). Таким
M2
U2
/ Il
1^21 І
І І
І
' /, і і
'
4
-і
!
!2
Г
/||
| І ,—і І2
. . І 4
1.
■
..І— ^ 4
а
б
Рис.
4—17.
Зовнішні
характеристики двох трансформаторів:
а—окремо
працюючих при U
>
V
k\\\
б
—
паралельно працюючих при j
+
U^
[
чином, трансформатор, який має меншу напругу короткого замикання, буде перевантажений. Для нормальної роботи трансформаторів, які працюють паралельно, на практиці допускають розходження напруг короткого замикання не більш як +10%.
Щоб увімкнути трифазні трансформатори на паралельну роботу (рис. 4—16, б), треба, крім зазначених вище вимог, додержувати ще й такої: щоб трансформатори належали до однієї групи сполучення обмоток. При вмиканні на паралельну роботу трансформаторів трифазного струму з різними групами сполучення між обмотками трансформаторів виникне велика різниця потенціалів, внаслідок чого потечуть неприпустимі за величиною зрівнювальні струми.
При додержанні всіх вимог паралельної роботи трансформаторів слід вмикати затискачі вторинних обмоток на спільні шини з однаковими потенціалами. Для цього первинні обмотки обох трансформаторів вмикають до мережі ABC {ще. 4—16, б). Вторинну обмотку одного з трансформаторів вмикають на збірні шини abc; вторинну обмотку другого трансформатора вмикають лише одним будь- яким затискачем до відповідної шини, наприклад затискач а2 до
шини а. Між затискачами b2 — b і C2 — с вимірюємо напругу. Якщо стрілка вольтметра зупиниться на нулі, то це покаже, що кути зсуву фаз між первинними і вторинними напругами однакові, і затискачі B2 і C2 можна вмикати на паралельну роботу. Якщо вольтметр покаже певну напругу, то вмикання їх на паралельну роботу неможливе. При цьому слід сполучити два інші виводи вторинних обмоток і знову шукати вольтметром затискачі з однаковими потенціалами.
9. АВТОТРАНСФОРМАТОРИ
Автотрансформатором називається такий трансформатор, в якого на замкненому сердечнику є лише одна обмотка, що частинами належить одночасно первинному і вторинному колам
Рис.
4—18.
Схема
автотрансформатора.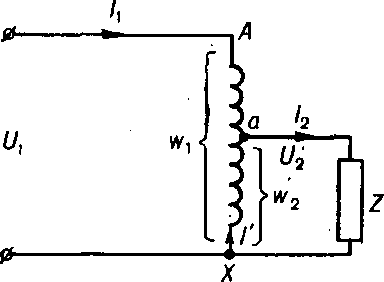


Якщо до первинної обмотки знижувального автотрансформатора з числом витків Co1 підвести напругу U1, а вторинну обмотку залишити розімкненою, то струм в обмотці створює магнітний потік Ф, який індукує в кожному витку обмотки е. р. с. Так, в обмотці Sy1 = wAx індукуватиметься е. р. с. E1 = 4,44 f W1 Ф, а в частині обмотки аХ — е. p. с. E2 = = 4,44/ш2Ф-
Відношення е. р. с., індукованих в обмотках AX і аХ, як відомо, є коефіцієнтом трансформації:

W1
Wfl
'
k
=
Оскільки при холостому ході автотрансформатора спад напруги дуже малий, то можна вважати, що U1^ E1, a Lr02 ~ E2. Тоді коефіцієнт трансформації можна подати в такому вигляді:
(4-33)
Wt U2
Якщо до частини обмотки аХ приєднати навантаження Z, то в колі навантаження потече струм I2. Нехтуючи втратами в автотрансформаторі, можна написати таке рівняння:
2·
тобто енергія, підведена до автотрансформатора, дорівнює енергії, яку даватиме він. Тоді
Струм навантаження Z2 складається з струму мережі I1 і з струму /':
І2 — Ii 1' · (4—35)
/'
= /2_/1
=
/2ίΐ
(4-36)
Це дає змогу загальну частину обмотки аХ виконати з провідника меншого перерізу, ніж переріз вторинної обмотки звичайного трансформатора, причому, чим ближче коефіцієнт трансформації до одиниці, тим це буде вигідніше.
Верхня частина обмотки Aa, по якій протікає первинний струм
I1, має число витків
Wl-Wt= W1 — η-J . (4—37)
Втрати обмоткової міді в цьому випадку в — -jj раз менші за втрати на первинну обмотку звичайного трансформатора.
Таким чином, автотрансформатор порівняно з звичайним трансформатором не тільки простіший за конструкцією (одна обмотка замість двох), а й дає значну економію міді' і сталі і має вищий к. к. д.
Якщо рівняння (4—35) помножити на U2, дістанемо:
UJt = UtI1 + UJ' або P2 = Рел + Pемл (4—38)
тобто при k ф 1 підведена до автотрансформатора потужність P1 = U1I1 передається в коло навантаження частково електромагнітним шляхом Рем, а частково безпосередньо електричним Рел. Цим автотрансформатор також відрізняється від звичайного трансформатора, в якому вся енергія у вторинну обмотку передається тільки електромагнітним шляхом. У цілому робота автотрансформатора під навантаженням аналогічна до роботи звичайного трансформатора і має схожу векторну діаграму.
Автотрансформатори можна використовувати як для зниження, так і для підвищення напруги. Виготовляють їх для невеликих коефіцієнтів трансформації k= 1,5 — 2.
При k > 2 автотрансформатор стає невигідним через те, що обмотки високої і низької напруг сполучені між собою електрично, отже, споживачі можуть опинитися під великим потенціалом. Це небезпечно і потребує спеціального захисту вторинного кола від перенапружень.
Трифазні автотрансформатори (рис. 4—19) виконують подібно до трансформаторів трифазних. Напругу до струмоприймача знімають з частини обмотки AX в одній фазі.
У деяких автотрансформаторах напругу регулюють плавно, переміщаючи контакт, що ковзає по обмотці (наприклад, лабораторний регулювальний автотрансформатор типу JIATP-2).
Автотрансформатори застосовують у радіотехніці, кінотехніці, а також для зниження напруги при запусканні потужних синхронних і асинхронних двигунів.
Рис.
4—19.
Схема
трифазного автотрансформатора.
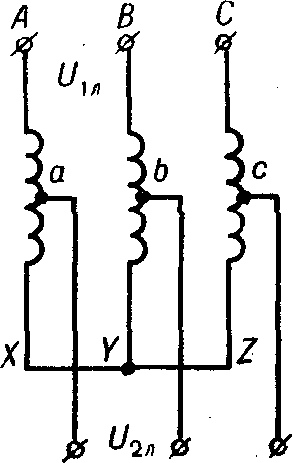
К. к. д. сучасних потужних автотрансформаторів досягає 99,7%.
10. ВИМІРЮВАЛЬНІ ТРАНСФОРМАТОРИ
Вимірювальні тран с ф о р м а- т о р и застосовують для під’єднання в мережу електровимірювальних приладів змінного струму, якщо ці прилади не можуть бути ввімкнені в сітку безпосередньо.
В установках напругою понад 380 в (а часто і при напрузі 380 в) вимірювальні прилади вмикають у коло через вимірювальні трансформатори. У цьому разі вимірювальні прилади ізолюють від високої напруги, що створює порівняно безпечне їх обслуговування. Крім того, це дає можливість застосовувати легкі і дешеві вимірювальні прилади, -виготовлені на малий струм (5 а) і малу напругу (100 в). Виготовлення вимірювальних приладів, розрахованих на великі струми і з ізоляцією на велику напругу, недоцільне, бо вони будуть громіздкими, незручними і дорогими.
Існує два види вимірювальних трансформаторів: трансформатори напруги і трансформатори струму.
Трансформатори напруги являють собою звичайні знижувальні трансформатори малої потужності (порядку 200—500 вт). їх виготовляють трифазними (рис. 4—20, а) і однофазними (рис. 4—20, б) на первинну (вищу) напругу 0,38; 0,5; 3; 6; 10 кв і вище. Вторинна (низька) напруга, на яку вмикають вимірювальні прилади, в усіх трансформаторах напруги дорівнює 100 в.
Первинну обмотку трансформатора напруги вмикають у коло високої напруги паралельно тим приладам і опорам, на затискачах яких треба виміряти напругу. Вторинну обмотку приєднують безпосередньо до котушок напруг вимірювальних приладів: вольтме
трів, ватметрів, лічильників і т. ін., які між собою сполучені паралельно. Шкалу вимірювальних приладів, призначених для роботи від трансформаторів напруги, градуюють так, щоб прилад відразу давав дійсні значення вимірюваної величини.
Величина первинної вимірюваної напруги U1 визначається за формулою: U1 — U2k.
Коефіцієнт трансформації k = jp практично не змінюється,
![]() якщо
не навантажувати трансформатор понад
його номінальну потужність.
якщо
не навантажувати трансформатор понад
його номінальну потужність.
Рис.
4—20.
Вимірювальні
трансформатори напруги:
а
—
схема вмикання трифазного трансформатора;
б — схема вмикання однофазного
трансформатора.
Сітна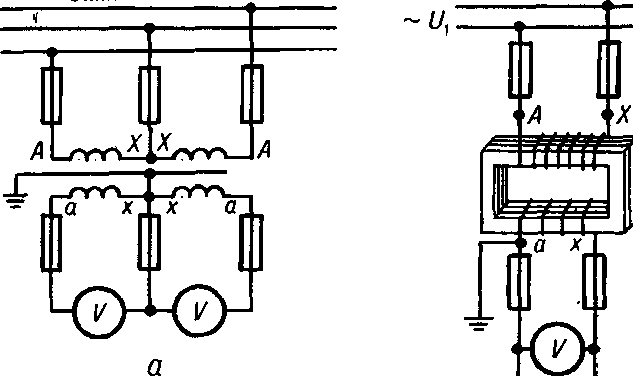
Оскільки опір обмотки вольтметра великий, то вимірювальний трансформатор напруги практично завжди працює в режимі холостого ходу, чим забезпечується незмінне співвідношення між первинною і вторинною напругами.
Трансформатори напруги на 0,38; 0,5 і 3 кв виготовляють сухими типів HOC, HTC і ін., а на вищі напруги — з масляним заповненням типів НОМ, HTM та ін. (Н—трансформатор напруги; O — однофазний; T —трифазний).
При вмиканні трансформатора напруги в мережу його вторинна обмотка ні в якому разі не повинна бути замкнена накоротко, бо можуть згоріти обидві його обмотки. Вона повинна бути завжди замкнута на вольтметр або залишатися розімкненою.
У коло високої напруги трансформатори напруги вмикають через запобіжники, щоб захистити трансформатор від перенапруг. У колі низької напруги запобіжники повинні бути ввімкнені лише в неза- землені проводи. Вони захищають трансформатор від перевантажень, неправильного заземлення або короткого замикання у вторинному колі. У більшості випадків цілком достатньо ввімкнути запобіжники на 2 а.
Щоб усунути будь-яку небезпеку при обслуговуванні установки, один кінець вторинної обмотки трансформатора і його стальний кожух заземлюють, інакше при пошкодженні ізоляції первинної обмотки вторинна обмотка і ввімкнуті в неї вимірювальні прилади можуть мати високий потенціал відносно землі, що небезпечно для обслуговуючого персоналу.
У лабораторній практиці широко використовується універсальний переносний багато граничний однофазний трансформатор напруги типу УТН, зовнішній вигляд якого зображено на рис. 4—21.
JWWfflW
Ж
ДЛ д
Рис.
4—21.
Зовнішній-
вигляд лабораторного трансформатора
напруги типу УТН.


Вимірювальні прилади приєднують до вторинної обмотки нижнього елемента каскаду. Кожний елемент має допоміжні зв’язувальні обмотки, які сполучені зустрічно з відповідною обмоткою сусіднього елемента. Зв’язувальні обмотки застосовують для вирівнювання напруги між елементами каскаду.
При відсутності цих обмоток елементи 2, З і 4 працювали б як дросельні котушки, і напруга першого елемента навантаженого трансформатора була б менша від напруги інших елементів. Такий трансформатор мав би велику похибку і залежав би від навантаження вторинного кола. Зв’язувальні обмотки розподіляють навантаження між усіма елементами трансформатора, що сприяє зменшенню похибки.
Трансформатори струму застосовують для вмикання амперметрів і струмових котушок ватметрів, лічильників
BH
— обмотка
високої напруги; HH
—
обмотка низької напруги; В — зв’язуючі
обмотки.
/
— струмоведучий стержень (первинна
обмотка); 2
—
фарфоровий ізолятор; 3
—
кожух, який закриває сердечник з
вторинною обмот-. кою; 4
—
гайки, якими . затискається стержень
в ізоляторі і приєднуються плоскі
шини; 5
—
затискачі вторинної обмотки; 6—чавунний
фланець для кріплення трансформатора
Рис.
4—24.
Прохідний
трансформатор струму типу ТПОФ: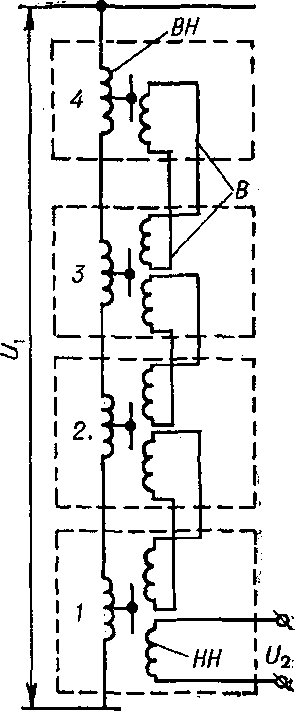



тощо (рис. 4—23). Відрізняються вони від трансформаторів напруги тим, що їх первинна обмотка своїми затискачами JI1XJIi, вмикається послідовно. Вона має незначну кількість витків, а при струмі понад 600 а — всього один виток. Вторинна обмотка має велику кількість витків і в усіх трансформаторах розрахована на 5 а. До її затискачів N1 і N2 приєднують. струмові котушки вимірювальних приладів, які сполучають між собою послідовно.
Сила струму у вторинному колі менша, ніж у первинному, приблизно в стільки разів, у скільки разів число витків вторинної обмотки більше за число витків первинної обмотки:
Zi = % = k, I1 = kl2, (4-39)
I2 W1 1 '
де /г — коефіцієнт трансформації трансформатора струму.
Коефіцієнт трансформації в паспорті трансформатора позначається відношенням величини первинного струму до вторинного, наприклад, 600/5 а. Цей коефіцієнт залишається для трансформатора практично сталим, якщо опір увімкнених до вторинної обмотки приладів і з’єднувальних проводів не перевищує номінального опору трансформатора. Якщо амперметр призначений для постійної
Рис.
4—23.
Схема
вмикання трансформатора струму.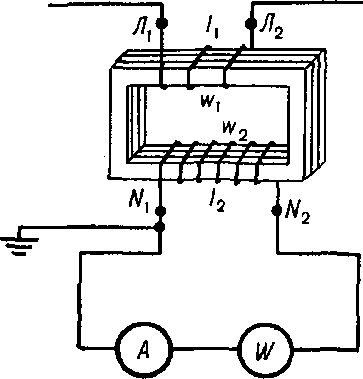
Рис. 4—22. Схема каскадного трансформатора напруги на 220 кв типу НКФ-220:
спільної роботи з трансформатором струму, то значення первинного струму наносять безпосередньо на його шкалі.
Рис.
4—25.
Опорний
котушковий трансформатор струму
типу ТКФ:
—
затискачі
первинної обмотки;
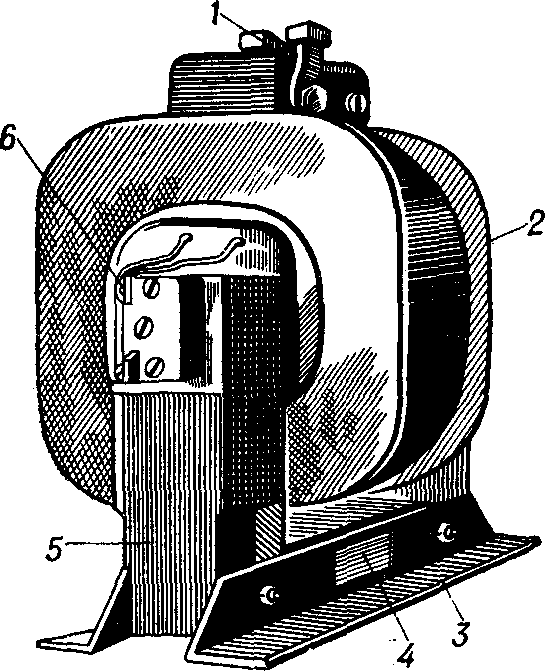
— фарфоровий ізолятор; 3 — осноса трансформатора; 4 — паспорт; 5 — сердечник; 6 — затискачі вторинної
обмотки.
Оскільки опір струмових котушок вимірювальних приладів відносно малий (менший за 1 ом), то трансформатор струму практично працює в режимі короткого замикання.На відміну від усіх розглянутих трансформаторів у трансформаторі струму первинний струм є струмом навантаження і його величина не залежить від опору вторинного кола.
Під час роботи трансформатора струм первинної обмотки створює магнітний потік CD1, величина якого залежить від струму навантаження. Струм у вторинній обмотці створює магнітний потік Ф2, який розмагнічує трансформатор.
 Сумарний
магнітний потік буває невеликим.
Якщо ж залишити вторинну обмотку
трансформатора струму при навантаженні
розімк- неною, то струм у вторинній
обмотці і магнітний потік Ф2
дорівнюватимуть нулю. Тому сумарним
магнітним потоком буде магнітний потік
первинної обмотки Ф^Цей потік залежить
від навантаження і індукує у вторинній
обмотці трансформатора велику е. р. с.
Сумарний
магнітний потік буває невеликим.
Якщо ж залишити вторинну обмотку
трансформатора струму при навантаженні
розімк- неною, то струм у вторинній
обмотці і магнітний потік Ф2
дорівнюватимуть нулю. Тому сумарним
магнітним потоком буде магнітний потік
первинної обмотки Ф^Цей потік залежить
від навантаження і індукує у вторинній
обмотці трансформатора велику е. р. с.
(10 кв і більше), небезпечну для обслуговуючого персоналу та для ізоляції вторинного кола.
Крім того, перегрівається сердечник, що може призвести до згоряння обмоток, а також виникає залишкове намагнічування сердечника, що призводить до великих похибок при вимірюванні.
Рис.
4—26.
Зовнішній
вигляд універсального переносного
лабораторного багатограничного
трансформатора струму типу УТТ-6.
Для безпеки обслуговуючого персоналу один із затискачів
вторинної обмотки і стальний кожух трансформатора струму заземлюють. Трансформатори струму вибирають за номінальною напругою, номінальним первинним струмом, за конструкцією тощо.
Трансформатори струму за своєю конструкцією поділяються на стаціонарні і переносні. Стаціонарні трансформатори в свою чергу поділяються на прохідні (рис. 4—24) і опорні котушкові (рис. 4—25).
Прохідні трансформатори струму одночасно є ізоляторами, що проходять крізь стіни розподільних пристроїв. Опорні трансформатори дешевші, ніж прохідні, і встановлюються в основному на відкритому повітрі.
Рис.
4—27.
Вимірювальні
кліщі.
Переносні трансформатори струму призначені для роботи в лабораторних умовах і охоплюють великий діапазон струмів. Зовнішній вигляд універсального переносного трансформатора струму типу УТТ-6 зображено на рис. 4—26.
На практиці для грубих вимірювань струмів на лініях широко застосовується переносний трансформатор струму з амперметром. Це так звані вимірювальні кліщі (рис. 4—27), які мають лише вторинну обмотку, замкнену на амперметр. Рознімним сердечником охоплюють провідник, який відіграє роль первинної обмотки трансформатора, і вимірюють струм.
АСИНХРОННІ ДВИГУНИ
1. БУДОВА, ПРИНЦИП ДІЇ І КОНСТРУКЦІЯ ТРИФАЗНИХ АСИНХРОННИХ ДВИГУНІВ
Основними частинами асинхронного двигуна є статор, ротор і підшипникові щити (рис. 5—1). Трифазні асинхронні двигуни бувають з короткозамкненим (рис. 5—1,а) або фазним ротором (рис. 5—1,6).
Статори всіх типів асинхронних двигунів майже однакові. Вони складаються з таких частин: станини (або корпусу) з лапами; стального сердечника, який складається з штампованих ізольованих один від одного листів електротехнічної сталі з пазами для укладання обмотки статора; обмотки статора, виготовленої з ізольованого мідного дроту і укладеної в пази сердечника. Обмотка призначена для утворення обертового магнітного поля. Її розраховують і виготовляють так само, як і обмотку синхронних генераторів (див. розд. VI).
Ротор складається з таких частин: стального циліндра, складеного з штампованих ізольованих один від одного листів електротехнічної сталі; вала ротора, на якому закріплено стальний циліндр ротора, підшипники, приводний шків і вентилятор; обмотки ротора, яка в короткозамкнених двигунах складається з мідних стержнів, які з торців замикаються кільцями, утворюючи так зване «біляче колесо» (рис. 5—2).
У двигунах невеликої потужності біляче колесо виготовляють, заливаючи пази ротора алюмінієм.
У пази фазного ротора укладають трифазну обмотку, виготовлену за типом обмотки статора. Як правило, фазну обмотку ротора сполучають зіркою. При цьому кінці обмотки з’єднують разом, а початки приєднують до контактних кілець, на які встановлюють щітки, сполучені з пусковим реостатом ПР (рис. 5—3).
Підшипники насаджують на вал і кріплять зовнішніми обоймами в підшипникових щитах.
Вентилятор кріплять на валі ротора. Він призна-
чений для створення потоку повітря, який охолоджуватиме електродвигун.
Підшипникові щити є опорою для підшипників ротора. їх прикріплюють болтами до станини двигуна.
Принцип дії двигунів, як і генераторів, грунтується на використанні трьох основних явищ електромагнетизму: 1) механічної
Рис.
5—1.
Трифазні
асинхронні двигуни: а
— з короткозамкненим ротором; б
— з фазним ротором; / — корпус двигуна;
2
—
обмотка статора; 3
—
підшипникові щити; 4
—
ротор; 5
—
контактні кільця фазного ротора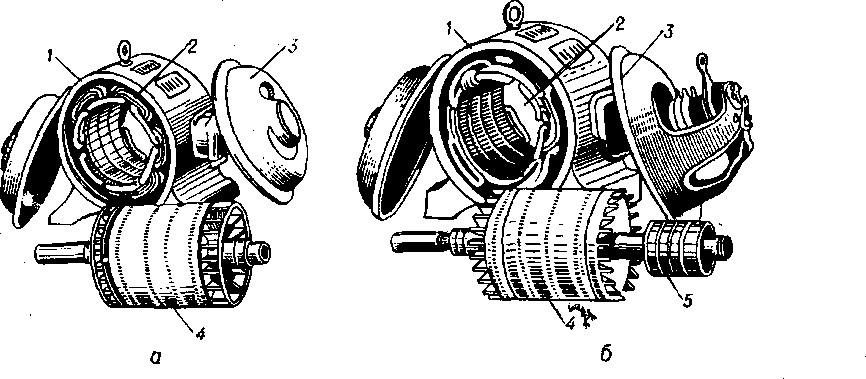
взаємодії струмів, відкритої Ампером у 1821 p.; 2) електромагнітної індукції, відкритої Фарадеєм у 1831 p.; 3) теоретичному узагальненні цих явищ (про напрям індукованого струму), зробленому петербурзьким академіком Ленцем у 1834 р.
 Якщо
ввімкнути двигун у мережу трифазного
струму, то по його трьох обмотках,
зсунутих у просторі на 120°,
потече
струм, який створить обертове магнітне
поле (див.
Якщо
ввімкнути двигун у мережу трифазного
струму, то по його трьох обмотках,
зсунутих у просторі на 120°,
потече
струм, який створить обертове магнітне
поле (див.
§ 2—5), що обертатимёться з швид- 60/
кістю п, = — .
P
Рис.
5—2.
Короткозамкнена
обмотка («біляче колесо») ротора
асинхронного двигуна.
За правилом лівої руки знаходимо напрям виштовхувальної сили, яка виникає при взаємодії провідника із струмом і магнітного поля. З рис. 5—4 видно, що ці сили утворюють обертовий момент у напрямі, який відповідає напряму обертання магнітного поля. Ротор обертатиметься з швидкістю п2, трохи меншою за швидкість обертання поля O1.
хронного
двигуна.
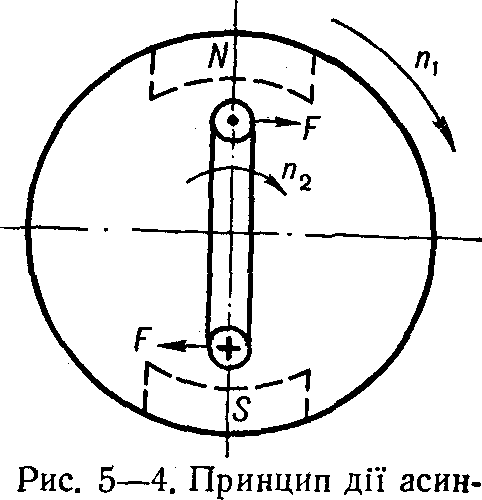
Рис.
5—3. Обмотка
фазного ротора з пусковим реостатом.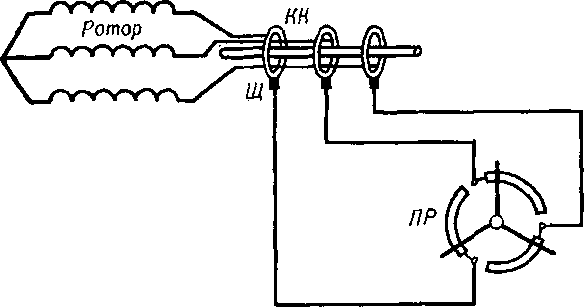
Явище відставання ротора від обертового поля статора називається ковзаннямі позначається буквою S. Ковзання є величиною змінною. Воно залежить від навантаження на валу двигуна. Із збільшенням навантаження оберти ротора зменшуються (ротор загальмовується), а отже, збільшується ковзання 5, і навпаки. Ковзання визначається відношенням різниці чисел обертів магнітного поля статора Jt1 і обертів ротора п2 до числа обертів поля статора nt:
C _ nI — nI .
(5-1)
S
=
(5-2)
• 100%.
Під
час пуску двигуна (ротор нерухомий) п2
=
0, тому
5=1.
При
холостому ході двигуна швидкість
обертання ротора пг
майже
дорівнює швидкості обертання поля
статора /I1
і
ковзання майже дорівнює нулю. Для
сучасних асинхронних двигунів ндмі-
нальне ковзання Sfi
(при
номінальному навантаженні двигуна)
коливається в межах 2-f~6%.


Залежно від умов роботи електродвигуни виготовляють різної конструкції, а саме: відкриті, захищені, закриті, вибухобезпеч- ні і т. ін.
Відкриті електродвигуни не мають спеціальних пристроїв для захисту обертових частин, а також частин, що перебувають під напругою.
Захищені електродвигуни мають спеціальні пристрої, які захищають їх від проникнення всередину сторонніх тіл (від пилу, газів і вологи ці пристрої не захищають).
Закриті електродвигуни захищені з усіх боків, але всередину їх може проходити повітря для охолодження.
Рис.
5—5.
Асинхронні
двигуни: а
— захищений двигун серії А; б
— захищений двигун з фланцем типу АОФ.
Вибухобезпечні електродвигуни мають надійно закритий корпус, через який вогонь не може вирватись назовні, що дає можливість використовувати їх у вибухонебезпечних приміщеннях.
У Радянському Союзі асинхронні двигуни об’єднані в єдину союзну серію, яка за потужністю поділяється на чотири групи: 1) — від 5 до 60 вт\ 2) — від 0,6 до 100 кет; 3) — від 100 до 1000 кет і 4) понад 1000 кет. Двигуни цієї серії виготовляють на стандартні напруги 127, 220, 380, 500 в і на 3, 6 і 10 кв.Швидкість їх обертання — 750, 1000, 1500 і 3000 обіхв. На напругу 3 і 6 ке виготовляють двигуни потужністю 100 кет і вище, а на 10 кв — тільки тихохідні, потужністю понад 1000 кет.
Найбільше поширені двигуни другої групи з короткозамкненою алюмінієвою обмоткою ротора. Двигуни цієї групи бувають двох видів: захищені, які позначаються літерою А і закриті, що обдуваються повітрям і позначаються AO; AJI — захищені з алюмінієвим корпусом; АОЛ — закриті, обдуваються, з алюмінієвим корпусом.
До корпусу кожного двигуна прикріплюють металеву бірку — паспорт двигуна, на якому написано основні його дані: тип, напруга, потужність, cos φ і т. ін. Якщо тип двигуна, наприклад, AO 41—2,
Обмотка
асинхронного
двигуна
Нлемний
щиток
[Ж
Л
C4
б
Г:
С, :
C2
:
""JC3
.
І
рС6
рС4
о іC5
в
Рис.
5—6.
З’єднання
обмоток двигуна:
а
—приєднання кінців обмоток клемного
щитка; б
—- з'єднання обмоток зірксю; в
— трикутником.
асинхронного
то
його
слід розшифровувати так:
АО — електродвигун
трифазний короткозамкнений,
закритий,
який обдувається; перша цифра 4
—
двигун четвертого габаритного розміру
(умовне позначення зовнішнього
діаметра сталі статора), друга цифра 1
—
першої довжини (умовний номер довжини
активної сталі), третя цифра (після
риски) 2
—
число полюсів статора; якщо двигун має
два полюси, то в нього швидкість обертання
становить 3000
об/хв.
Двигуни
єдиної серії До
трифазно! сітки 3
фазним ротором по
значають:
AK
—
в захищеному і А КЗ
—
в закритому виконанні.
Однофазні
асинхронні короткозамкнені двигуни
типу АОЛБ загального призначення
належать до першої групи єдиної
серії.
Електропромисловість
випускає також двигуни з короткозамкненим
ротором типів АП і АОП з підвищеними
пусковими моментами. Двигуни AC і AOC
із
збільшеним ковзанням застосовуються
на важких роботах (на екскаваторах
тощо).
На
рис. 5—5,
а
зображено асинхронний двигун з
горизонтальним валом серії А, а на рис.
5—5,
б
двигун типу АОФ з фланцем для кріплення
до вертикальної стінки механізму, який
приводиться в рух двигуном.
Крім
паспорта, на корпусі двигуна кріплять
також клемний щиток, до якого підводяться
кінці трьох обмоток статора. Початки
обмоток
позначають C1,
C2,
C3,
а
кінці — відповідно C4,
C5,
Св.
На
щитку двигуна кінці обмоток приєднують
до клем так, як зображено на рис. 5—б,
а.
Сполучення кінців слід виконувати
зіркою при ил
=
380 е
або трикутником при Ujl
=
220 в
(рис. 5—6,
б
і в).
5—2.
Е.
P.
С.
СТАТОРА І РОТОРА ТРИФАЗНОГО АСИНХРОННОГО
ДВИГУНА
Якщо
обмотку ротора асинхронного двигуна
розімкнути, а обмотку статора
ввімкнути в трифазну мережу, то по
обмотці статора піде струм, який утворить
стале за величиною обертове магнітне
поле. Воно перетинатиме витки обмотки
статора та ротора і наводитиме в них
відповідні е. р. с. E1
і
E2-
Діючі
значення цих е. р.с. у кожній фазі статора
і ротора визначають за формулами:







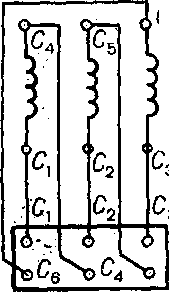
= 4,44 ko6 Ihw1O1;, Ei = 4,44 ko6. ZfiWiΦι,
(5-3)
(5-4)
рп і
рухомому роторі fx = f2 = зд- ; Ф — обертовий магнітний потік статора.
Крім основного потоку статора, у машині існує і потік розсіювання, який замикається навколо кожного активного провідника обмотки статора. Потік розсіювання також перетинає витки статора і наводить у них е. р. с. розсіювання Esl.
Як і для трансформатора, для асинхронного двигуна можна написати рівняння рівноваги е. р. с.:
U1 = —E170rjZ0X1, (5—5)
де /0 — струм в обмотці статора при розімкненій обмотці ротора, який називається струмом холостого ходу. У сучасних двигунах його значення коливається від 20 до 40% від номінального струму двигуна і0гх — спад напруги на активному опорі обмотки статора TltI0X1—спад напруги на індуктивному опорі обмотки статора X1, що визначається величиною е. р. с. розсіювання Esl; E1 — складова частина напруги, яка дорівнює е. р. с., що індукується в обмотці статора основним магнітним потоком Ф.
Відношення е. р. с. статора E1 до е. р. с. ротора Ei називається коефіцієнтом трансформації е. р. с. ke\
(5-6)
(5-7)
звідки
E1 = kfii = El
де E' 2 — е. р. с. обмотки загальмованого ротора, приведена до числа витків обмотки статора;
E2 — е. р. с. нерухомого ротора.
Якщо обмотку ротора замкнемо накоротко, то по ній під впливом е. р. с. ротора E2 потече струм Ii, який створить роторний потік Ф2 і потік розсіювання Ф52.
При русі ротора швидкість обертання магнітного потоку статора відносно ротора дорівнюватиме:
Частота е. р. с. ротора їг=щ, де P — число пар полюсів.
Оскільки S = я* ~ Пі, то
пг = /I1 (I — S). (5—9)
Підставляючи в рівняння 5—8, дістанемо:
п — O1 — Zi1 + U1S = HiS. (5—10)
Тоді
Ь - и - sSr = <5-и>
Е. р. с. в обмотці рухомого ротора буде:
Els = AMko6. г/гй^Фі = 4,44k0e. nfiSw^ = E2S, (5—12)
тобто е. р. с. в обмотці ротора, який обертається, Eis дорівнює добутку е. р. с. нерухомого ротора Ei на ковзання S.
При пуску S = I, тоді Ets = Ei і /¾ = Z1 = 50 гц.
При холостому ході двигуна п2ях пг і ковзання наближається до нуля; тоді е. р. с. ротора E2SCTae дуже малою і змінюється з частотою fi = Z1S < 0,5 гц.
Із збільшенням навантаження ковзання двигуна зростає і досягає номінального значення при номінальному навантаженні Sh -(2—6)%, а частота/ = (1 ч-2,5) гц.
Потік розсіювання ротора Ф82, перетинаючи витки ротора, наводить у них е. р. с. розсіювання ротора Esz.
Рівняння рівноваги е. р. с. ротора матиме вигляд:
E2s = lift TtXis, (5—13)
де Xis — ZnfiL2 = 2Hf1SL2 = XiS; IiT2 і I2Xis— спад напруги відповідно на активному і реактивному опорах ротора. Реактивний опір при обертанні ротора X2s дорівнює добутку реактивного опору при нерухомому роторі Xi на ковзання S, а повний опір ротора:
Z2s = Y^Txis. (5—14)
б—3. РІВНЯННЯ СТРУМІВ АСИНХРОННОГО ДВИГУНА
Як було вже зазначено, під впливом прикладеної напруги U1 по обмотках двигуна потече трифазний струм. Створене цим струмом магнітне поле (D1 обертатиметься з швидкістю пу = Це
поле замикається по сталі ротора і статора, проходячи повітряний зазор між ними.
Обертовий магнітний потік Фх, перетинаючи обмотку ротора, індукує в ній е. р. с., під впливом якої по обмотці ротора потече струм. Величину струму ротора можна знайти з формули (5—13):
/,
= ίϋ = E‘ls,
=
= Jb'
5
.
. (5—15)
Z2S Yrl + Xl Yrl + (X2-S)2
Струм ротора /2 відносно струму статора I1 перебуває у проти- фазі, тобто зсунутий майже на 180°. При запуску двигуна струм Is має найбільше значення, оскільки E2s = E2, і відстає віде. p. с. Ets на кут ψ2, близький до 90°, тому що в початковий момент пуску опір X2S = X 2 Y 8—10 раз більший за г2 і є суто реактивним. Коли ротор починає обертатись, зменшується ковзання S, а отже E2s і I2. Зменшується також X26, тому кут зсуву між струмом і е. р. с. також зменшується.
Струм ротора /¾ змінюється з частотою /2 = S · / і створює магнітний потік Ф2, який обертається відносно ротора з швидкістю п: п = = = U1S. Оскільки ротор у свою чергу обертається з швидкістю Пг, то магнітне поле Ф2 обертатиметься відносно статора з швидкістю H1S + пг = IilS + nt(l — S) = nL. Отже, магнітне поле ротора Ф2 обертається в просторі незалежно від режиму роботи двигуна з тією самою швидкістю і в тому самому напрямі, що й магнітне поле статора Фх.
Результуючий магнітний потік машини дорівнює геометричній сумі потоків статора і ротора:
Ф = O1-J-O,. (5—16)
Цей потік переносить енергію від статора до ротора.
За другим законом Кірхгофа для обмотки статора при навантаженні двигуна можна записати:
O1 = (-E1)+!^ + 'I1X1. (5-17)
Внутрішній спад напруги в обмотці статора I1Z1 при номінальному навантаженні двигуна становить всього кілька процентів від напруги мережі U1. Тому можна вважати, що I1- Z1^ 0. Тоді E1 = U1. Оскільки напруга мережі практично незмінна, то й E1 « s» const і, отже, E1 = Ф == U = const, тобто робочий магнітний потік асинхронного двигуна пропорційний напрузі сітки і практично не залежить від навантаження. Виходячи з цього, робочий потік можна визначити за формулою (1—29):
¢ = ½¾, (5-18)
ГМ
а магнітні потоки статора і ротора можна записати подібно до рівняння (5—18):
(5-19)
(5—20)
звідки дістаємо рівняння струмів двигуна:
![]()
(5-21)
Отже, струм статора I1 дорівнює геометричній сумі струму намагнічування I0 і взятого з оберненим знаком зведеного зна
чення струму ротора I2-. Внаслідок наявності в контурі магніт·
I0wLm1k1
= ILwLm
Jti
+ l2w2m2k%,
(5—22)![]()


звідки
Величина — Jli називається коефіцієнтом тран-
сформації струмів асинхронного двигуна.
Як і для трансформатора I2 (5—23) зведений струм роторної обмотки, що створює таку саму намагнічуючу силу, як і струм /2 в роторі:
![]()
(5-24)
Добуток коефіцієнта трансформації струмів kt на коефіцієнт трансформації е. p. с. ke називається коефіцієнтом трансформації асинхронного двигуна:
Щоб можна було будувати векторну діаграму і додавати електричні величини обох обмоток, величини роторної обмотки зводять до статорної обмотки.
г
«/
е. р. с. обмотки загальмованого ротора до числа витків обмотки статора за формулою: E1t- Еъ ■ ke.
При зведенні активного опору роторної обмотки до статорної можна виходити з того, що втрати в міді обмотки ротора не залежать від зведення, отже
тгі\гг = Iti1I2 V',
де г2 — зведений активний опір роторної обмотки до статорної, т, і т2 — число фаз обмоток статора і ротора. Звідки г‘г —
_ r m2 ( Iz \2
tWiUi/ 4 щ KIt/kJ
. ЩЩк\об
Оскільки ki — T— , TO
' ЩЩк2о б
щЬ\об mlWlkio6 (К
Ta — /*й t ~ ’ і. T2 1 ft, ’ К>і —— ГOrZ. (5 аЬ)
2 2^fe206 m2w2k2o6 24 V '
це k — коефіцієнт трансформації асинхронного двигуна.
При зведенні індуктивного опору обмотки ротора до статора виходитимемо З ТОГО, ЩО кут ψϊ між е. р. с. Ei і струмом I2 не
X X'
залежить від зведення. Отже tg Ф® = —? = —f, звідки
rI rZ
X2 = rI X2 = kX2, (5-27)
' 2
де Xr2 — зведений індуктивний опір обмотки ротора.
Згідно з (5—15) струм у роторі, який обертається,
I2 = . (5-28)
Vrl + x22s Vr\ + s*x\
Поділивши чисельник і знаменник правої частини рівняння на ковзання S, дістанемо:
^ ■· (5-29)
V(r,/S)*+X.
З цього рівняння видно, що величина струму в роторі, який обертається, залежить тільки від ковзання. Зсув фаз між е. p. с. E2s і струмом /а також змінюється із зміною ковзання:
Si
Z,
(5-30)
COS
ψϋ
l^r2
+ S2X*


Рис.
5—7.
Векторна
діаграма асинхронного двигуна при
навантаженні.
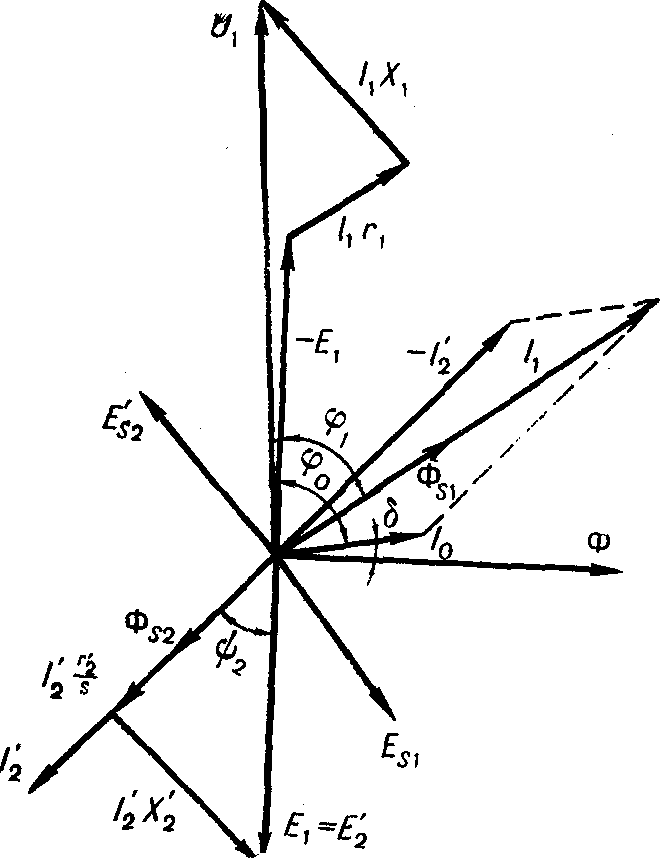
Після зведення величини обмотки ротора до обмотки статора можна побудувати векторну діаграму асинхронного двигуна при навантаженні (рис. 5—7).
В основу векторної діаграми лягає вектор робочого магнітного потоку Ф, створений струмом намагнічування /0, який випереджає вектор потоку на невеликий кут магнітного запізнення б.
Е. р. с. статора E1 і зведена е. р. с. ротора E12 відстають від потоку Ф, який їх створив, на кут
~ (див. § 1—6). Зведений струм
ротора I2 відстає від е. р. с. Е‘г на кут ψ2. Він створює потік розсіювання Ф52, ЯКИЙ у СВОЮ чергу створює Є. p. С. розсіювання Es2,
що відстає від Ф32 на ~, тобто
(5-31)
Крім того, існує спад напруги на активному опорі /2'
кільки обмотка ротора при роботі асинхронного двигуна замкнена накоротко, то напруга на затискачах ротора дорівнює нулю, а е. р. с. ротора E2' повністю зрівноважується е. р. с. розсіювання El2 і спадом напруги на активному опорі обмотки ротора, тобто
(5-32)
Отже, вектор е. р. с. ротора складається з двох складових: спаду напруги на активному і індуктивному Х'г опорах обмотки ротора.
З формули (5—23) маємо:
h=i о+ (-/;), (5-33)
тобто струм статора I1 складається з геометричної суми струму намагнічування I0 і складової (—I2), яка компенсує розмагнічуючу дію струму ротора. В напрямі вектора струму статора I1 спрямовується вектор потоку розсіювання Ф5І, який наводить е. р. с.
розсіювання Esl, що відстає від Ф51 на кут γ і зрівноважується
спадом напруги на індуктивному опорі обмотки статора I1X1:
Esl = I1X1. (5-34)
Вектор спаду напруги на активному опорі обмотки статора Іхгх спрямовується паралельно вектору струму I1 як такий, що збігається за фазою. Рівняння рівноваги е. р. с. буде:
U1=—E1 + I1T1 + IiX1. (5—35)
Отже, прикладена напруга· L^1 дорівнює геометричній сумі складової напруги (— E1), спаду напруги на активному опорі I1T1 і спаду напруги на реактивному опорі обмотки статора I1X1. Як видно з векторної діаграми, кут <р0 між векторами струму холостого ходу Z0 і вектором напруги U1 великий, тобто cos φ0 — малий, а при навантаженні — навпаки. З цього випливає, що незавантажені двигуни зменшують cos φ електричної мережі.
З векторної діаграми видно, що струми Z1 і I2, а отже, і їх потоки, спрямовані майже діаметрально протилежно. Таким чином, струм ротора чинить розмагнічуючу дію відносно струму статора.
Із збільшенням навантаження на валі асинхронного двигуна зменшуються обороти вала двигуна, а це призводить до збільшення ковзання, що в свою чергу збільшує струм ротора, який зменшує магнітний потік статора. Зменшення магнітного потоку зумовлює зменшення індукованої в обмотці статора е. p. с. E1. Остання діє проти струму I1, а отже, ЇЇ зменшення зумовлює збільшення первинного струму Z1 і посилення результуючого магнітного потоку. Струм Z1 досягає такої величини, при якій відновлюється рівновага між прикладеною напругою і е. р. с.
При зменшенні навантаження на вал двигуна автоматично збільшуються оберти вала, що веде до зменшення ковзання і струму I1. У цьому виявляється загальний принцип саморегулювання всіх електричних машин.
5. ОБЕРТАЛЬНИЙ МОМЕНТ TA МЕХАНІЧНА ХАРАКТЕРИСТИКА АСИНХРОННОГО ДВИГУНА
У § 5—1 було з’ясовано утворення пари сил, яка виникає внаслідок взаємодії обертового магнітного потоку статора з струмом, індукованим цим потоком у провідниках роторної обмотки (див. рис. 5—4). Якщо розглядати не один виток, а всю поверхню ротора з розподіленою на ньому обмоткою, то питання обертового моменту
машини ускладнюється.
В,
E
і
^Г*Ч \
/
\
π
\У
\
2π
3
4
5
6 7 8 9
^10Sl1S'2
13 14 15 Ів/
α
,ψ2,
π-ψ2
Ф2
j
π-ψ2
Рис.
5—8.
Розподіл
сил, діючих на провідники ротора
асинхронного двигуна: а—-схема
двополюсного двигуна, ротор якого має
16
провідників;
б
—
хвильова діаграма.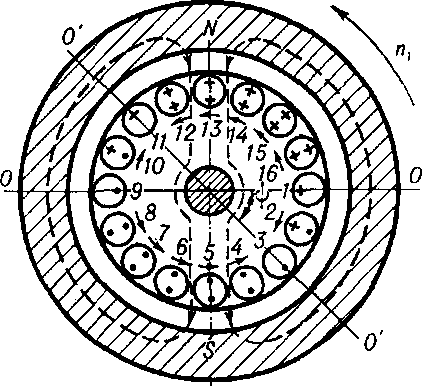

Струм ротора I2 відстає за фазою від е. p. с. E2 на кут внаслідок наявності індуктивності обмотки ротора. На рис. 5—8,а напрям струму ротора зображено на внутрішньому ряді (бл-ижче до осі ротора). Провідники зі струмом, спрямованим до спостерігача, розташовані під лінією OO', повернутою відносно нейтральної лінії OO на кут ψ2 проти напряму обертання поля. Над лінією OO' розташовані провідники зі струмом протилежного напряму.
На тому самому рисунку стрілками показано напрями механічних сил, які діють на провідники внаслідок взаємодії струму ротора
з магнітним полем статора. Частина сил, що діє на провідники, розташовані між лініями 00 і О'О', створює момент протилежного напряму (провідники 2 і 10). Чим більший кут ψ2 і чим менший cos ψ2, тим менший буде результуючий обертальний момент.
На рис. 5—8, б зображено хвильову діаграму магнітної індукції, е. р. с. і струму ротора, а також сили на дільниці подвійного полюсного поділу для певного моменту часу, що відповідає рис. 5—8, а.
(5—36)
F = BH.
Оскільки магнітна індукція або е. р. с. змінюються за законом
(5-37)
то струм ротора, який також змінюється синусоїдально і відстає від е. р. с. на кут ψ2, можна записати у вигляді
(5-38)
Підставивши рівняння (5—37) і (5—38) в рівняння (5--36), дістанемо:
(5-39)

На рис. 5—8, б крива е. р.с. Ег має таку саму форму і такесаме просторове розміщення, як і крива індукції В, оскільки е. р. с. у кожному провіднику пропорціональна магнітній індукції поля в тій точці на колі ротора, в якій перебуває провідник. Крива F точно відображає закон зміни електричної потужності змінного струму при зсуві фаз між струмом і напругою (див. рис. 1—7).
Fcp
= BJ2J
~
J
sin
а
· sin
(а
—
ψ2)
da
=
О
2π
O
2π
O
Fcv
—
2 costIjS*

![]()

![]()
![]()
Знаючи співвідношення між амплітудним, середнім і діючим значеннями гармонічних функцій, дістанемо:
= Y Y Bcp V2.12l cos ψ2 = BcpI2I cos ψ2. (5—41)
Середній обертальний момент машини дорівнює:
Mcp = Fqp- (5-42)
де Ζ) — діаметр ротора.
Якщо на роторі Z2 провідників, то повний обертальний електромагнітний момент буде:
Meii =Fcp-Z2-. (5-43)
Використавши рівняння πΟ = 2ρτ і Ф = BcpIz, де Ф — магнітний потік одного полюса; τ — полюсний поділ; р — число пар полюсів, дістанемо:
Мем = Fcp--£-Z2 = ^руГ=^ BcpI2I Cosf2 · Z2^LI = ^^=Ф/2 cos ψ2.
Остаточно обертальний момент асинхронного двигуна дорівнює:
Мем =СФІ2 cos ψ2, (5—44)
де сталий коефіцієнт C = · (5—45)
Знайдений обертальний момент вимірюється в ньютон-метрах (н - м) або джоулях, якщо магнітний потік Ф вимірюється у веберах (вб), а струм у провіднику ротора — в амперах. Оскільки
In = g-jjj = 0,102 кГ, то, помноживши рівняння (5—44) на 0,102,
дістанемо:
ЛІем = 0,102СФ/а cos ψ2 (кГм). (5—46)
Рівняння (5—46) показує, що електромагнітний момент асинхронного двигуна пропорціональний робочому потокові машини Ф і активній складовій струму ротора I2a — I2 cos ψ2.
Залежність електромагнітного моменту від трьох змінних (Ф, I2 і cos ψ2) утруднює аналіз рівняння, тому подамо M у вигляді функції однієї змінної — ковзання. Щоб знайти цю залежність, підставимо у формулу (5—44) значення Ф,/г, cos<j>2i k% з рівнянь (5—3), (5—7), (5—15) і (5—30):
Мем = 4,44kl06wjke ' г\ + s*x\ = СмЕі + Stx* ’ (5 _47) „ C
де Cm = -ти—і—F — стала величина для машини.
4,44А:1(,б£еа>і/
Нехтуючи спадом напруги в обмотці статора і вважаючи, що е. р. с. статора .E1 і напруга сітки приблизно рівні і сталі, тобто E1ZZiU1 = const, дістанемо:
(5-48)
1r\ + S^x\'
M
Рис.
5—9.
Залежність
обертального моменту асинхронного
двигуна від ковзання.
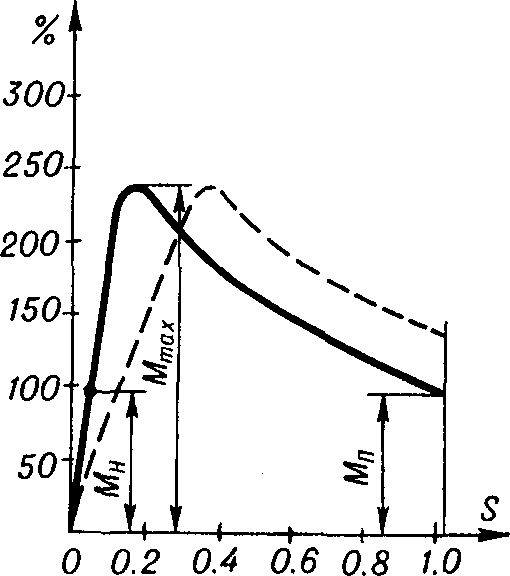
Залежність обертального моменту від ковзання зображена на рис. 5—9.
При збільшенні навантаження на вал двигуна збільшується ковзання S, внаслідок чого зростає струм ротора Ii і зростає електромагнітний момент до певного максимального значення Aimax.
При більших ковзаннях значно збільшується реактивний опір ротора через збільшення частоти, від якої залежить реактивний опір X2S== 2nf1SLi.
Внаслідок цього збільшується реактивна складова струму ротора, тобто струм ротора дедалі більше відстає від е. р. с. При цьому cos ψ2 зменшується.
Кут г|)2, в межах якого розміщено провідники, що гальмують ротор (рис.
8,а), збільшується, тому результуючий момент, який діє в напрямі обертання поля, починає зменшуватись.
Для визначення критичного ковзання Sk, при якому обертальний момент набуває максимального значення Mmi7l, слід узяти похідну моменту по ковзанню і прирівняти її до нуля:
=
0.
(5-49)
~~dS~
(Г
2
0.
Звідси
r\
+ S2X*
-
2S2X2
Остаточно маємо:
r2
+S2Xt-S2SX;
=
C1Ulr2

h.
X,
S
= Sb
Критичне значення ковзання S* дорівнює відношенню активного опору кола ротора до реактивного. Підставивши критичне значення ковзання в рівняння 5—49, дістанемо максимальний момент:
Mmax = C1U1-Jf. (5-51)
Отже, максимальний обертальний електромагнітний момент двигуна не змінюється із зміною активного опору ротора г2, але при цьому змінюється критичне ковзання. Зауважимо, що обертальний момент пропорційний квадрату прикладеної напруги. Внаслідок цього асинхронні двигуни дуже чутливі до коливань напруги мережі. Так, наприклад, при зниженні напруги на 10% обертальний момент зменшується на 19%.
Рис.
5—10.
Механічна
характеристика асинхронного двигуна.
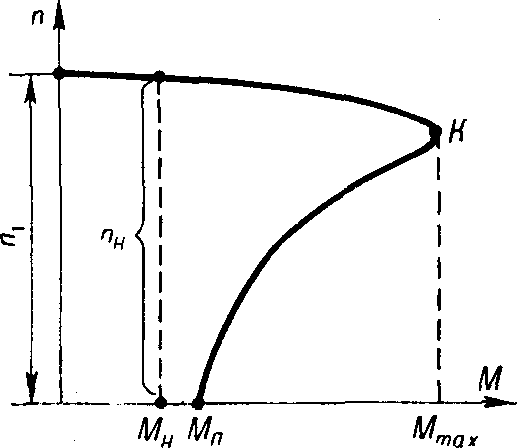
Залежність обертального моменту від ковзання при збільшеному активному опорі ротора зображено пунктирною лінією на рис. 5—9. Збільшення опору ротора в короткозамк- нених двигунах досягають виготовленням клітки ротора з підвищеним опором, застосуванням глибокопазних роторів тощо, а в двигунах з фазним ротором — вмиканням у коло ротора пускових реостатів.
Якщо криву M = /(S) повернути на 90° за годинниковою стрілкою і по ординаті відкладати замість ковзання число обертів вала двигуна, то дістанемо залежність ti = f(M), яка називається механічною характеристикою, оскільки графік зв’язує між собою дві механічні величини — швидкість обертання ротора і обертальний момент двигуна (рис. 5—10). У момент пуску п — 0 і S = 1, а пусковий момент — Mn. У кінці пуску при холостому ході число обертів вала майже досягає синхронних обертів пи а ковзання Ss=O; тоді M = 0. При критичному ковзанні S = Sk дістанемо максимальний обертовий момент Aimax.
Механічна характеристика поділяється на дві частини: верхня «стійка» робоча частина від S' = 0 до S' = Sk і нижня «нестійка» частина від S = Sk (точка К) до S = 1.
Для «стійкої» частини діє принцип саморегулювання двигуна. При збільшенні навантаження (гальмівного моменту) швидкість обертання ротора зменшується, ковзання збільшується, зростає струм ротора, а разом з ним і обертальний момент, який зрівноважує гальмівний момент. Настає рівновага моментів, але число обертів ротора буде трохи меншим від попереднього. Саморегулювання діятиме до точки К.
На «нестійкій» частині (нижче точки К) збільшення гальмівного моменту призводить до різкого зростання ковзання, зменшується обертальний момент і двигун практично відразу зупиняється. Причина цього явища була пояснена по кривій M = f(S). Момент Mh
відповідає номінальному режиму і називається н о- мінальним моментом двигуна. Цьому моменту відповідає номінальне ковзання Sh (для двигунів середньої потужності S„ = (0.02 ч- 0,06) і номінальне число обертів ротора: пн = /Z1 (1—S„) = = (0,94 -5- 0,98) /Z1.
Yff
ІІІ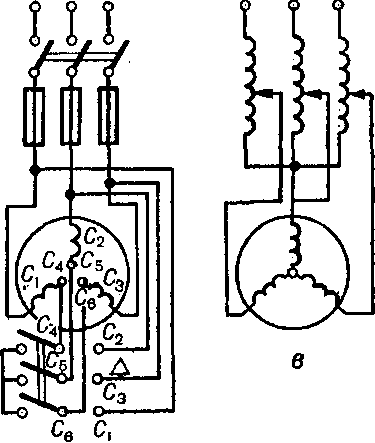


Відношення харак-
Ivlfl
Рис.
5—11.
Способи
пуску асинхронних
короткозамкнених
двигунів.
100 кет 1,7-=-2,5.
= 2,5 для двигунів з великим числом обертів
\ Ni н
При ковзанні S = 1 асинхронний двигун розвиває пусковий
Mn
момент Mn. Відношення Tj- характеризує також пускові власти-
Mh
чф Д4
вбсті двигуна > 1 -г- 2. Для двигунів невеликої потужності це відношення вище.
6. ПУСК АСИНХРОННИХ ДВИГУНІВ
Короткозамкнені асинхронні двигуни невеликої потужності (до 20 кет) запускають безпосереднім вмиканням двигуна в мережу
Рис.
5—12.
Залежність
струму статора від швидкості
обертання асинхронного двигуна.
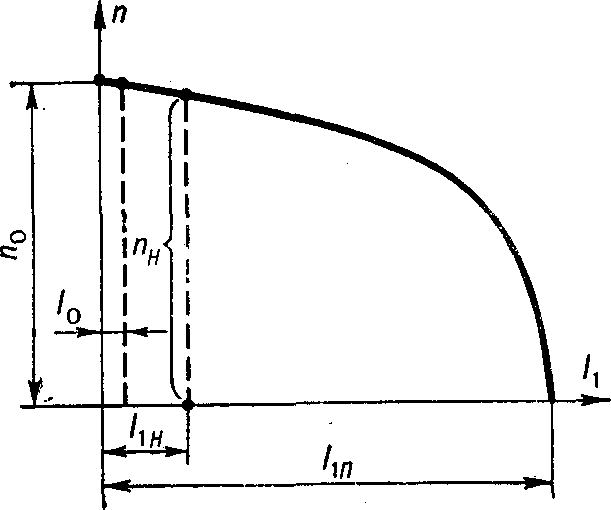
7-разового значення від номінального струму (рис. 5—12):
I in = (4-=-7) І їн· (5-52)
Значний пусковий струм двигуна хоч і не створює безпосередньої небезпеки для двигуна, бо за кілька секунд спадає і не може
нагріти машини до недозволеної температури, проте є небажаним, оскільки спричинює зниження напруги в мережі в момент пуску, а це несприятливо позначається на роботі інших споживачів.
Для зменшення пускового струму двигуна з короткозамкненим ротором на час пуску знижують напругу на його затискачах. Такий пуск виконують без навантаження, оскільки обертальний момент двигуна зменшується пропорційно квадрату напруги.
 Застосовують
два основних методи пуска
ко-
роткозамкнених двигунів на зниженій
напрузі: 1)
перемиканням
обмоток статора з зірки на три-
Застосовують
два основних методи пуска
ко-
роткозамкнених двигунів на зниженій
напрузі: 1)
перемиканням
обмоток статора з зірки на три-
7" і ° і кутник; 2) за допомогою автотрансформатора.
f A-'''''' Якщо обмотка двигуна в робочому поло-
/ женні повинна бути сполучена трикутником,
Рис.
5—13.
Схема
пуску асинхронного двигуна з фазним
ротором.
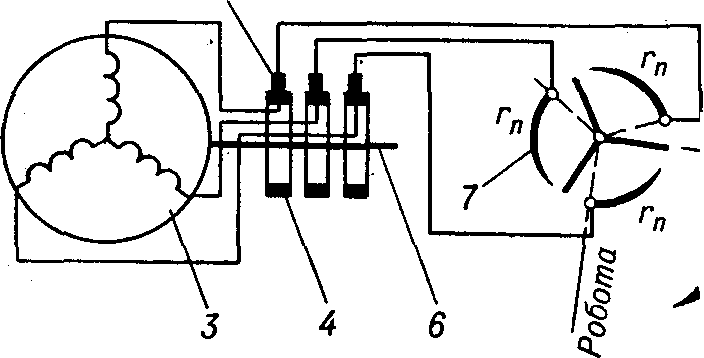
Пуск асинхронного двигуна з фазним ротором здійснюється так (рис. 5—13): вмикають триполюсний рубильник 1 у колі статора при повністю введеному опорі трифазного пускового реостата 7 (положення «Пуск»), Із збільшенням швидкості обертання вала двигуна 5 поступово зменшують опір пускового реостата, виводячи його повністю до кінця пуску (положення «Робота»). При цьому всі три фази ротора будуть замкнені повзунком реостата накоротко. Потім натискають на спеціальний важіль двигуна, який закорочує всі три кільця ротора і піднімає щітки, щоб зменшити їх спрацювання. На цьому пуск закінчується. Після цього ручку пускового реостата переводять у початкове положення «Пуск».
Явища, які відбуваються під час пуску двигуна з фазним ротором, можна пояснити, користуючись механічними характеристиками двигуна при різних опорах пускового реостата (рис. 5—14). Як було доведено раніше, максимальний обертовий момент асинхронного двигуна не залежить від активного опору ротора, а критичне ков
зання прямо пропорційне цьому опору. Повний опір пускового реостата вибирають так, щоб пусковий струм статора не перевищував
(1,8-т- 2,2)
<r'
Рис.
5—14.
Механічні
характеристики асинхронного двигуна
з фазним ротором при зміні опору
пускового реостата.

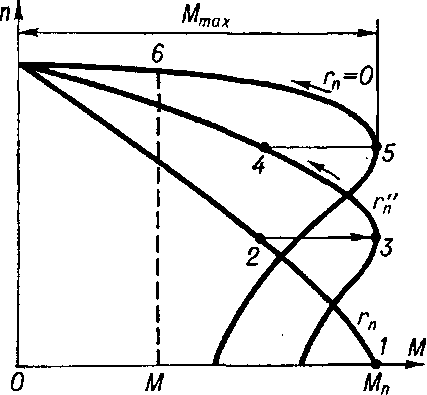
Таким чином, введення активного опору в коло фазного ротора зменшує пусковий струм, збільшує пусковий обертальний момент і забезпечує плавність пуску. Проте цей спосіб пуску застосовується лише для двигунів з фазним ротором, які дорожчі, ніж двигуни з короткозамкненими роторами.
Досить поширені асинхронні двигуни з двома короткозамкненими обмотками на роторі з глибоким пазом. Вони поєднують позитивні якості двох попередніх типів двигунів, а саме: вони дешеві
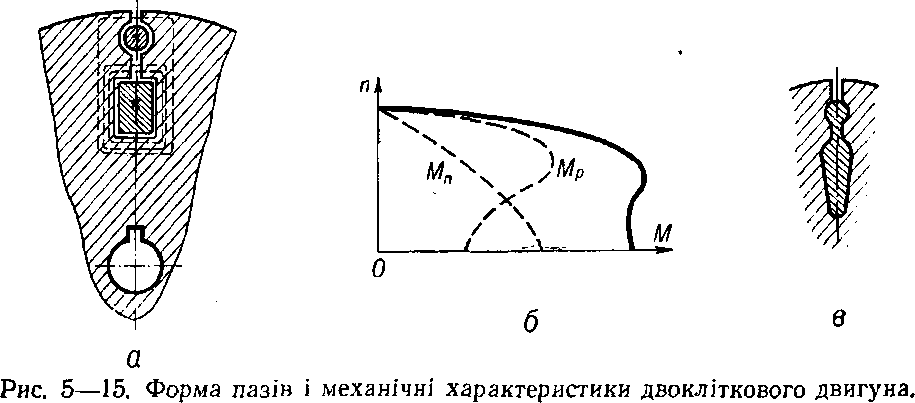
(як короткозамкнені) і мають добрі - пускові характеристики (як і двигуни з фазним ротором).
Перший двигун, який мав дві короткозамкнених обмотки, створив М. О. Доливо-Добровольський у 1893 р.
На рис. 5—15, а зображено в розрізі паз ротора з подвійною
кліткою. Паз має складну форму. У круглі отвори паза вставляють провідники з підвищеним питомим опором, наприклад з латуні або бронзи. Замикаючись спеціальним кільцем накоротко, вони створюють так звану пускову обмотку. У прямокутні пази, розміщені далі від поверхні ротора, вставляють провідники з малим питомим опором (мідні), які, замикаючись накоротко, другим кільцем утворюють робочу обмотку ротора.
Під час пуску такого двигуна в роторі індукуватимуться пускові струми, магнітні лінії яких замикатимуться здебільшого по сталі (див. рис. 5—15, а). З рис. (5—15) видно, що потік розсіювання,
а 6
Рис.
5—16.
Глибокий
паз і крива розподілу струму в провіднику
в момент пуску.
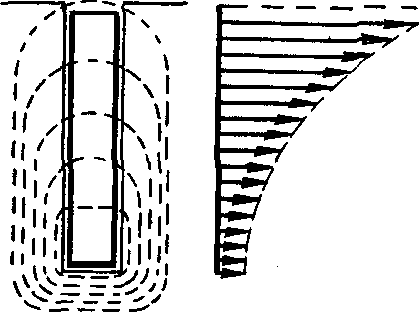
У міру розгону двигуна частота струму ротора двигуна зменшується в десятки разів, отже, зменшуватиметься індуктивний опір ротора, і струм ротора проходитиме в основному по робочій обмотці.
Обертальний момент M двокліткового двигуна складається з суми двох моментів, а саме: з моменту, який утворюється пусковою обмоткою Mn (див. рис. 5—15, б), і з моменту робочої обмотки Mp. Залежність швидкості обертання ротора п від сумарного моменту M являє собою механічну характеристику двокліткового двигуна.
На рис. 5—15, в зображено фігурний паз, який заливається алюмінієм. Підвищення активного опору клітки під час пуску тут забезпечується тільки за рахунок витіснення струму у верхні частини провідників клітки. Така подвійна клітка дешевша, але має трохи гірші пускові якості.
Двигуни з глибоким пазом мають короткозамкнений ротор, висота паза в якому в кілька разів більша за ширину. У цей паз закладають мідні провідники у вигляді широкої штаби (рис. 5—16). Підчас пуску двигуна, коли частота струму в роторі найбільша, індуктивний опір нижніх шарів провідника значно більший, і струм у провіднику витискується у верхню частину його перерізу. Активний опір провідника збільшується, бо переріз для проходження струму зменшується. Цим досягають збільшення критичного ковзання, обертального моменту і зменшення пускових струмів. Механічна характеристика двигуна з глибоким пазом має приблизно такий
самий вигляд, як і двоклітковий двигун. Перевагою двигуна з глибоким пазом є те, що він простіший, ніж двоклітковий, і, крім того, при запусканні менше перегрівається, бо тепло, яке виділяється при цьому в провіднику, розподіляється по всьому поперечному перерізу, а не тільки по його верхній частині, як у двоклітковому двигуні.
7. РЕВЕРСУВАННЯ АСИНХРОННИХ ДВИГУНІВ TA РЕГУЛЮВАННЯ ШВИДКОСТІ ОБЕРТАННЯ
Рис.
5—17.
Реверсування
асинхронного двигуна.
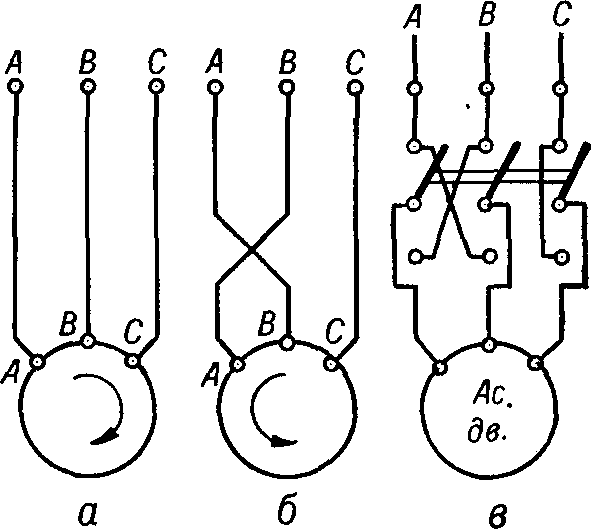
17, б).
Для перемикання провідників застосовують дво- або триполюсні перемикачі (рис. 5—17, в).
Застосовуючи реверсивні магнітні пускачі з кнопочним керуванням для двигунів з короткозамкненим ротором і контролери для двигунів з фазним ротором, досягають надійного і безпечного реверсування.
Регулювання швидкості обертання. Як відомо, число обертів ротора визначається за формулою: п2 = ях(1 — S).
Оскільки число обертів магнітного поля статора дорівнює
H1 = , то п2 = ^ (I - S).
Тобто, число обертів ротора двигуна можна регулювати: 1) змінюючи частоту струму мережі Z1; 2) реостатом у колі ротора; 3) змінюючи число пар полюсів обмотки статора р.
Регулювання швидкості обертання ротора зміною частоти струму мережі застосовується дуже рідко, тому що потребує окремого джерела струму або перетворювача частоти.
Швидкість двигуна з фазним ротором регулюють, вмикаючи в коло ротора спеціальний регулювальний реостат. При цьому із збільшенням опору реостата швидкість двигуна зменшуватиметься. Отже, цим способом можна тільки зменшувати оберти двигуна. Крім того, цей спосіб мало застосовується через те, що велика кількість енергії марно витрачається на нагрівання реостата.
Найбільш поширеним є спосіб регулювання швидкості обертання двигуна зміною числа пар полюсів. Для цього обмотку статора виконують так, щоб перемиканням груп котушок можна було змінювати число пар полюсів або на статорі укладають дві окремі обмотки (кожна на різне число полюсів). Ротор у цьому разі виготовляють звичайним короткозамкненим, число полюсів якого завжди дорівнює числу полюсів обмотки статора.
Рис.
5—18.
Зміна
числа пар полюсів перемиканням котушок
обмотки: а
— послідовне з’єднання; б—
паралельне з’єднання.
а
б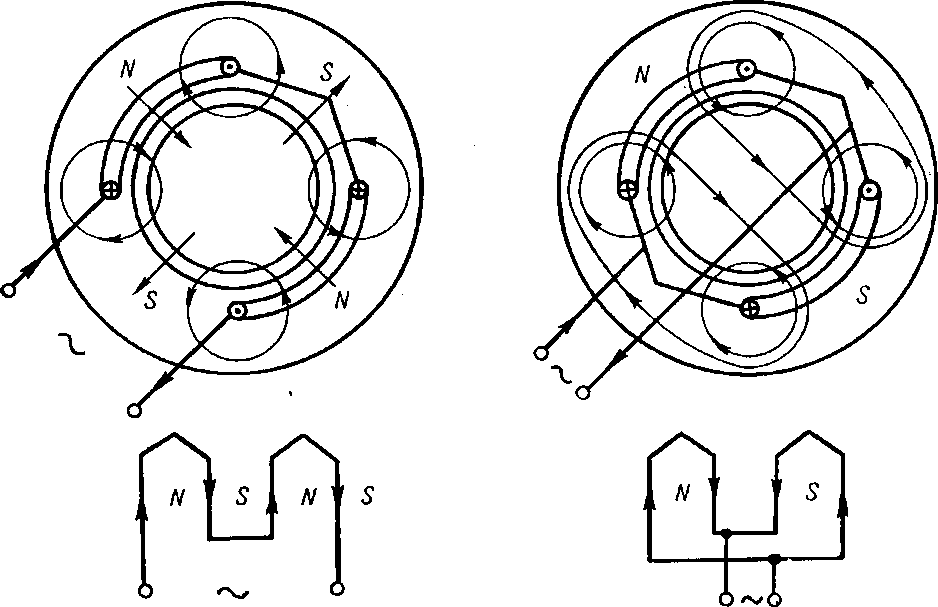
На рис. 5—18, а зображено послідовне сполучення котушок обмотки, які утворюють дві пари полюсів; на рис. 5—18, б ті самі котушки сполучені паралельно і утворюють одну пару полюсів. Існують і інші способи сполучення.
Такі двигуни складні за конструкцією перемикача і мають великі габарити. Заводи CPCP випускають такі двигуни з двома, трьома і чотирма ступенями обертів.
8. ЕНЕРГЕТИЧНА ДІАГРАМА АСИНХРОННОГО ДВИГУНА. ВТРАТИ
І к. к. д.
На рис. 5—19 зображено енергетичну діаграму асинхронного двигуна. З рисунка видно, що електрична потужність P1, яка підводиться з мережі до статора двигуна, більша, ніж потужність P2 на валі ротора двигуна. Це пояснюється тим, що перетворення енер
гії в двигуні з електричної в механічну супроводиться втратами енергії.
В асинхронному двигуні бувають такі втрати: в обмотці статора Р\об, в обмотці ротора Р^б, У сталі статора Plcm і механічні втрати Рмех.
Втрати в обмотках статора і ротора визначаються за формулами:
Ріоб /WlVl, /с СО\
n r2 V3 —
P 2об = т.2Ігг2,
де тх — число фаз статорної обмотки (тх = 3).
I
У
Ріоб
j
!
1
1
р,
! іре.,.
і і
і T
1
І
.}
Z-—/у\
Pmsx
^
P2 І——
І
Сітка
І
Статор
j
j
Ротор
j
Вал
Зазор
Рис.
5—19.
Енергетична
діаграма асинхронного двигуна.
З формули (5—53) видно, що втрати в обмотках залежать від навантаження.
Отже, ці втрати є змінними.
Втрати в сталі статора Plcm зв’язані з наявністю гистерезису і вихрових
струмів, створюваних внаслідок перетину змінним магнітним потоком сталі статора.
Втрати в сталі статора пропорційні квадрату магнітної індукції (потоку), або квадрату напруги: P\ст = β2 = Φ2 = ί/2 і є сталим незалежним від навантаження, оскільки [Z1 = Const.
Втратами в сталі ротора звичайно нехтують, тому що частота роторного струму при номінальному навантаженні дуже мала (/2 = 1 -т- 2,5 гц).
Як було вже зазначено, втрати в обмотці ротора змінні і залежать від навантаження. Оскільки із зміною навантаження змінюється і ковзання, то можна довести, що втрати в обмотці ротора пропорційні ковзанню. Справді, якщо від підведеної потужності P1 відняти втрати в статорі, то дістанемо електромагнітну потужність Рем (див. рис. 5—19), яка передається через повітряний зазор на ротор: Рем = P1- (P106 + Plcm). (5—54)
Механічну потужність Рмех матимемо, якщо від електромагнітної потужності віднімемо втрати в обмотці ротора Р206'·
P Mex — Рея Ріоб
або
P 2 об — Рем — P мех· (5 55)
Електромагнітна потужність визначається добутком обертального моменту електромагнітних сил на кутову швидкість обертання поля CD1:
Рем = Mcoi = M (5-56)
а механічна потужність на валу дорівнює добутку моменту на кутову швидкість обертання ротора ω2:
Pmsx= Мщ =M^. (5-57)
Ураховуючи, що число обертів ротора п2 = /I1-(I-S), дістанемо:
P206 = PeM -Puex = M2-^-M^ =
= M 2^ - M (I - S) = Рем - S. (5-58)
Отже, втрати в обмотці ротора пропорційні ковзанню 5.
Під час пуску двигуна, коли S=I, потужність, якої набуває ротор, перетворюється в тепло.
Механічні втрати Puex складаються з втрат на тертя в підшипниках, на тертя ротора об повітря і на вентиляцію двигуна. Вони залежать від швидкості обертання ротора, яка в робочому режимі майже не змінюється, тому і втрати можна вважати сталими:
Рмех = COnst.
Якщо від підведеної потужності P1 відняти всі втрати двигуна, то дістанемо корисну потужність на валі двигуна P2, яка позначається на паспорті:
= (5-59)
де Σ Pm— сума всіх втрат:
Σ Р«т — P\об + PIcm + Р206 + Pмех + Pд, (5-60)
де Pg — додаткові втрати, зумовлені наявністю зубців ротора і статора, вихрових струмів у різних вузлах машини і т. ін., які при номінальному навантаженні двигуна становлять 0,5% від його номінальної потужності.
Практично втрати в сталі і механічні втрати визначають з досліду холостого ходу. При цьому двигун працює при номінальній напрузі U = Uh. Споживана при холостому ході потужність іде повністю на механічні втрати і втрати в сталі (втратами в міді статора можна знехтувати).
Втрати в міді практично визначають з досліду короткого замикання, загальмовуючи ротор двигуна. До обмоток статора за допомогою автотрансформатора підводять знижену напругу, внаслідок
чого проходить номінальний струм: I1 = Iltl і I2 = /2«. Цього досягають при напрузі короткого замикання Uk. 3 < Ufl^ (15 ч- -т-25)%UH. Потужність, споживана при цьому двигуном, іде на втрати в міді, оскільки механічна потужність дорівнює нулю, а втрати в сталі незначні.
Коефіцієнт корисної дії асинхронного двигуна η дорівнює відношенню корисної потужності на валі P2 до всієї потужності, що підводиться з мережі до двигуна P1:
η 100%
або
71 = (р2 + SPim)100 % ’
або
η = (»-»-) ■ 100% = (l -¾1) · 100%. (5-61)
При номінальному навантаженні к. к. д. більшості двигунів лежить у межах 0,7 0,95, причому найбільше значення к. к. д. мають двигуни великої потужності. Залежність коефіцієнта корисної дії від навантаження двигуна зображено кривою на рис. 5—22.
9. РОБОЧІ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГУНА
Робочі характеристики трифазного асинхронного двигуна являють собою залежність потужності P1, споживаної двигуном, струму статора I1, коефіцієнта потужності Coscp1, к. к. д. η, обертального моменту Al, швидкості обертання ротора п2 і ковзання S від корисної потужності P2 на валі двигуна при сталій напрузі U1 на затискачах двигуна і при сталій частоті fx. Отже, P1, I1COSfu η, М, п2 і S = ψ(Ρ2) при U1 = Uih — const і Cp1 = const.
Для того, щоб дістати робочі характеристики, складають електричну схему за рис. 5—20.
Навантаження на валі двигуна створюють гальмом (рис. 5—21) або генератором постійного струму. За показами приладів і за допомогою обчислень будують робочі характеристики двигуна при різних навантаженнях (див. рис. 5—22). Обчислення проводять за такими формулами:
,, uAB + uBC + UCA і 1A + 1B + 1C ІС СОі
U1
— 2 , / j —
g , (5 Ь2)
де Uab ... і іа··· — діючі значення лінійних напруг і струмів.
Потужність, що підводиться до двигуна, визначається як алгебраїчна сума показів двох ватметрів:
Коефіцієнт потужності визначається за формулою:
(5-64)
COS
φ!
УШліл'
Корисний обертальний момент на валі двигуна визначається за формулою:
M=Gl кГм, (5—65)
де G — вага вантажу на гальмі в кГ; І— плече гальма в м.
0=
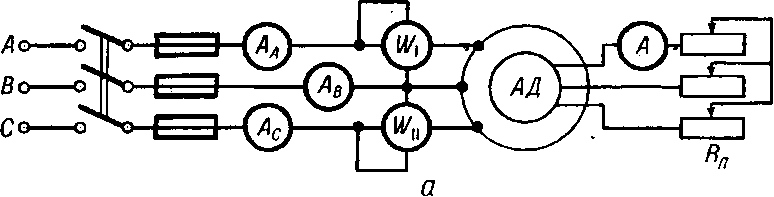
Рис.
5—20.
Схеми
електричних з’єднань асинхронних
двигунів для зняття робочих характеристик:
а
— з фазним ротором; б—
з короткозамкненим ротором.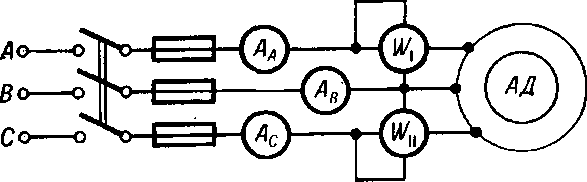
Корисну потужність Pi на валі двигуна обчислюють за формулою:
P2 = Μω2 = 9,81ω2Μ = 9,81 2-^~ = 1,028η*Αί (an), (5—66)
де ω2 — кутова швидкість ротора; п2 — швидкість обертання ротора (об/хв) (вимірюється тахометром). Коефіцієнт корисної дії визначається за формулою (5—61), а ковзання — за формулою (5—2).
З рис. 5—22 видно, що із зростанням навантаження всі величини відповідно змінюються. Справді, із збільшенням навантаження порушується рівновага моментів. Електромагнітний момент стає
меншим, ніж гальмівний момент, внаслідок чого, спадають оберти, а ковзання зростає. Внаслідок цього зростає е. p. с. Es2, а разом з нею і струм Z2, що приводить до зростання електромагнітного моменту, який зрівноважує гальмівний момент.
Рис.
5—21.
Схема
колодкового
гальма:
I
—
барашкова гайка; 2
—
пружина; 3
—
гальмівні
колодки;
4—
упор; 5
—
шків
двигуна.

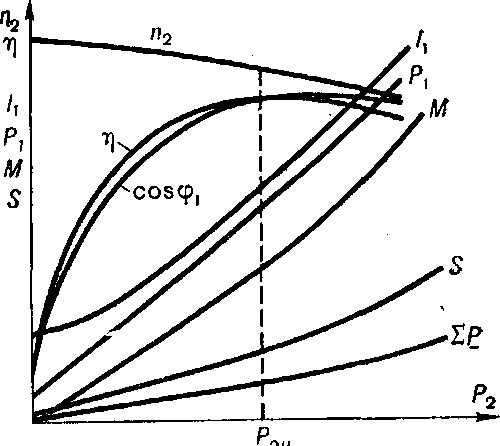
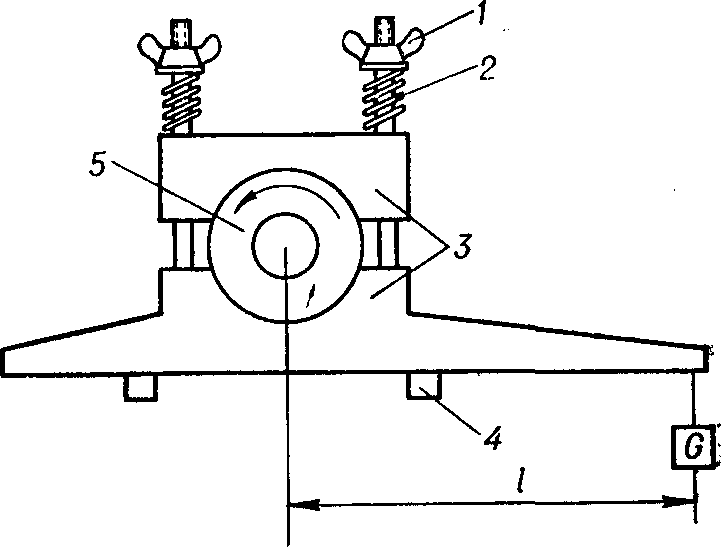
Найбільшого значення к. к. д. досягає при навантаженні, що дорівнює 75% від P2h, і ДО номінального навантаження cpscp, залишається майже сталим.
При значних навантаженнях к. к. д. починає спадати, оскільки зростають втрати SPem.
Рис.
5—22.
Робочі
характеристики трифазного асинхронного
двигуна.
кут фі зменшується, тому що збільшується активна складова роторного струму Z20 і відповідно до цього зростає активна складова статорного струму Iia.
Максимального значення cos φχ досягає при номінальному навантаженні. При перевантаженні cos φχ починає зменшуватись. Це пов’язано із збільшенням магнітного потоку розсіювання, внаслідок чого збільшується і реактивна складова струму ротора,
тобто зростав ψ2 і Φχ, а це веде до зменшення cos Cp1. У діапазоні навантажень двигуна між 25 і 50%, що дуже часто зустрічається в двигунах, які приводять у рух різні верстати, cos Cp1 дуже низький (0,6-=-0,75); це завдає великої шкоди енергогосподарству в цілому. Для збільшення cos φχ треба насамперед номінально завантажувати двигуни, а в разі потреби застосовувати батареї конденсаторів (див. § 1—13).
10. ОДНОФАЗНИЙ АСИНХРОННИЙ ДВИГУН І АСИНХРОННИЙ ГЕНЕРАТОР
Однофазні асинхронні двигуни останнім часом почали широко застосовувати в побуті. Вони застосовуються в холодильниках, електропрогравачах, вентиляторах, а також у медичній апаратурі, Оскільки однофазні двигуни мають гірші техніко-економічні характеристики, ніж трифазні (менший к. к. д., низький cos φ тощо), їх випускають малої потужності (не більше 1 ч- 2 кет).
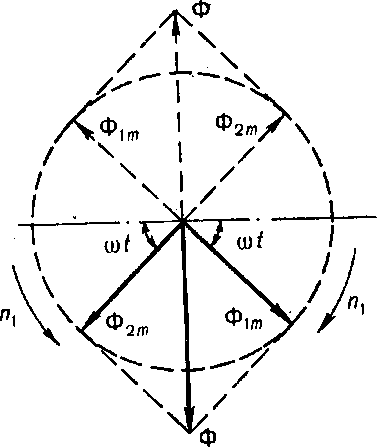 Однофазний
асинхронний двигун має статор з
однофазною обмоткою і корот- козамкнений
ротор. Особливістю двигуна є те, що
він не має свого пускового моменту.
Для його пуску застосовують різні
пускові пристрої: пускову обмотку,
розщеплення магнітного потоку
полюсів і т. ін.
Однофазний
асинхронний двигун має статор з
однофазною обмоткою і корот- козамкнений
ротор. Особливістю двигуна є те, що
він не має свого пускового моменту.
Для його пуску застосовують різні
пускові пристрої: пускову обмотку,
розщеплення магнітного потоку
полюсів і т. ін.
Якщо статор однофазного двигуна ввімкнути в мережу, то його ротор залишиться нерухомим. Проте досить надати ротору поштовху, щоб він почав обертатись і був спроможний нести механічне навантаження. Де пояснюється тим, що в однофазній обмотці, Рис. 5—23. Розкладання пуль- яка живиться змінним синусоїдальним суючого потоку на два оберто- СХруМ0М> створюється пульсуючий магнітний потік Ф = Фт sin ωί, який змінюється за величиною від +Фт Д° —але в просторі залишається нерухомим. Цей пульсуючий потік Ф можна замінити двома
однаковими
потоками Фіт
і Ф%т
(рис. 5—23),
Фіт
=
Ф2т
=
ЯКІ
60 А
обертаються в протилежних напрямах із швидкістю It1 = + - Ці потоки змінюються за синусоїдальним законом:
Ф іт — Ф 2т =
тг sin ω/.
Алгебраїчна сума векторів Ф1т і Ф2т дорівнює вектору пульсуючого потоку Ф1ш + Ф2т = 2 sin ωί = Фт sin ші = Ф.
Обертаючись у протилежних напрямах, потоки перетинають обмотку ротора і індукують у ній відповідні струми /, і I2, взаємодія яких з потоками створює обертальні моменти протилежного напряму:
Ai1
= £Фі
J1
cos Cp1;
Ai2
= M>2m/2
cos φ2
Результуючий момент дорівнює нулю: M = Ai1 — Ai2 = 0, і двигун не може провернутися. Якщо тепер ротор привести в рух сторонньою силою, він почне обертатися в той бік, куди буде зроблено поштовх. Пояснимо це.
Візьмемо ЧИСЛО обертів ПОТОКІВ Фіш і Ф2т таким, що дорівнює U1 (об/хв), а ротора п2. Тоді швидкість прямого потоку Ф\т відносно ротора дорівнюватиме різниці швидкостей поля і ротора:
n' — Ti1-пг = Ti1- Ti1 (1 — S) — nLS. (5—68)
Прямий потік індукуватиме в роторі струм з частотою
^ = = <5-69) Швидкість зворотного поля Ф2от відносно ротора дорівнюватиме сумі швидкостей поля і ротора:
п" — Ti1jT Uz = nL + /I1 (I — S) = H1 (2 — S). (5—70) Зворотне поле індукуватиме в роторі струми частотою
/2 =ж = ж (2-S) = /і(2-Я (5-71)
При fi = 50 гц і S = 5% дістаємо /2' = 2,5 гц, Ц = 97,5 гц, а отже f2>f2. Як відомо, індуктивний опір розсіювання ротора пропорційний частоті /2: xs2 = 2^f2LS2. Тому в робочому режимі
х'к > *s2, a cos ф2 = — Λί 0, тоді з формули (5—67) дістаємо: Ai2 ss 0. г2
І результуючий момент: M-M1 — Ai2 ^ M1 буде напрямлений у бік більшого моменту M1.
Для того щоб однофазний асинхронний двигун міг сам приводитись у рух, в його статорі, крім основної робочої обмотки, закладають ще й додаткову, так звану пускову, обмотку ПО (рис. 5—24,а). Пускову обмотку вмикають звичайно через додатковий активний або реактивний опір ДО з тим, щоб струм у ній був зсунутий за фазою відносно струму в робочій обмотці PO на кут, близький до 90°.
Значно частіше як додатковий опір до пускової обмотки застосовують конденсатор (рис. 5—24, б). Оскільки струми в робочій і
пусковій обмотках будуть зсунуті на 90°, відповідно будуть зсунуті за фазою і створені ними магнітні потоки Фр і Фя:
Ф =Фр.т*п*І·
®« = COS ιοί.
 Результуючий
ПОТІК
Ф
=
Фр
+
Ф„
буде обертовим потоком (див. § 2—6).
Цей
обертовий потік, перетинаючи обмотку
ротора, наводить у ній е. p.
с.
E2
і
струм I2.
Внаслідок
взаємодії Ф і I2
створюється
обертальний момент, який приводить
ротор у рух. Після пуску двигуна коло
пускової обмотки вимикається.
Результуючий
ПОТІК
Ф
=
Фр
+
Ф„
буде обертовим потоком (див. § 2—6).
Цей
обертовий потік, перетинаючи обмотку
ротора, наводить у ній е. p.
с.
E2
і
струм I2.
Внаслідок
взаємодії Ф і I2
створюється
обертальний момент, який приводить
ротор у рух. Після пуску двигуна коло
пускової обмотки вимикається.
Рис.
5—24.
Схеми
пуску однофазних асинхронних двигунів.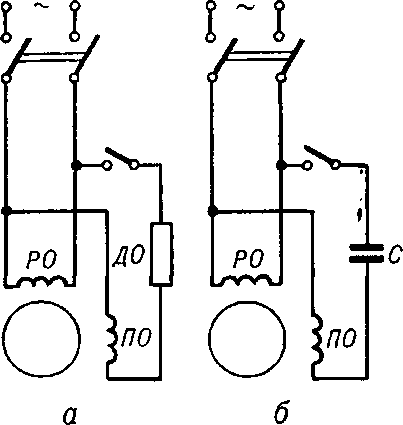
У деяких однофазних двигунах робоча обмотка і обмотка з конденсатором у колі залишається ввімкненою на весь час роботи. Такі двигуни називаються конденсаторними. Вони мають кращі робочі і пускові характеристики, вищий cos φ і більшу перевантажувальну здатність.
Для пуску двигуна в зворотному напрямі треба поміняти місцями кінці пускової (або робочої) обмотки.
Останнім часом почали застосовувати однофазні двигуни невеликої потужності з розщепленими полюсами (рис. 5—25). У цих двигунах полюси 2 розщеплюються на дві частини, на одну з яких надівають короткозамкнений виток 3. Струм, що індукується в корот- козамкненому витку основним потоком, створюватиме свій магнітний потік, який буде зсунутий за фазою на певний кут. Отже, ці два змінні магнітні потоки зміщені на деякий кут у просторі, зсунуті за фазою і утворюють обертове магнітне поле. Такий двигун може обертатися тільки в одному напрямі, тому що при зміні напряму струму в обмотці полюсів 1 (див. рис. 5—25) змінюється напрям струму і в короткозамкненому витку. Такі двигуни застосовують, наприклад, для приводу настільних вентиляторів тощо.
В умовах експлуатації звичайних трифазних двигунів можливі аварійні випадки, коли перегоряє запобіжник в одній фазі або обривається один провідник і двигун починає працювати як однофазний. Якщо це трапиться при роботі двигуна, то він не зупиниться, а продовжуватиме працювати як однофазний; при цьому значно збільшиться струм в одній фазі, зменшиться потужність, к. к. д. і cos φ. Тривала робота в однофазному режимі призведе до перегрівання двигуна і виходу його з ладу.
Рис.
5—25.
Однофазний
двигун з розщепленими полюсами:
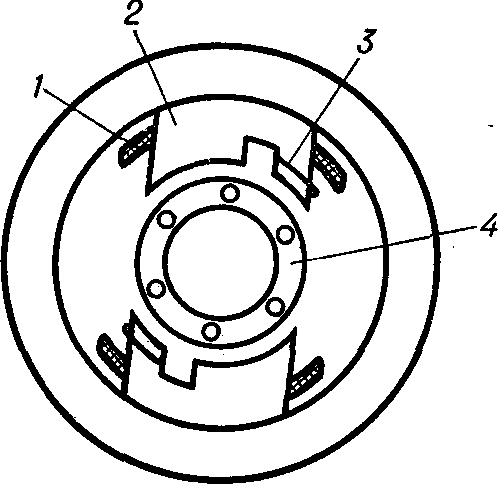
Якщо ротор асинхронної машини, збуджуваний від трифазної мережі, обертається в напрямі, що збігається з напрямом обертання магнітного поля, з швидкістю η 2, яка буде більшою за синхронну швидкість M1, то в цьому разі електромагнітна потужність Рем стане від’ємною:
S
=
<0;
п,
/
— обмотка; 2
—
полюс; 5
— ко-
роткозамкнений виток; 4
—ко-
роткозамкнений ротор.
це свідчить про передачу енергії від ротора до статора обертовим полем. Отже, асинхронна машина в цьому випадку є перетворювачем механічної енергії в електричну, яка віддається в мережу, тобто працює як генератор.
Асинхронні генератори застосовують у вітросилових установках і невеликих сільських гідроелектростанціях.
Розділ VI
СИНХРОННИЙ ГЕНЕРАТОР
6—1. ПРИНЦИП ДІЇ І БУДОВА СИНХРОННОГО ГЕНЕРАТОРА
Виникнення змінного струму у витку, що обертається в магнітному полі розглянуто в параграфах 1—1 і 2—4. Описаний там генератор з нерухомими полюсами (нерухомим індуктором) і обертовим якорем (витком) є лише схемою, що пояснює принцип дії. На електростанціях поширені трифазні синхронні генератори з нерухомим якорем і обертовим індуктором. Ці генератори мають велику потужність (до 300 000 ква і більше) і розраховані на високі напруги (до 20 000 в).
Синхронний генератор складається з нерухомої частини — статора 1 (рис. 6 — 1), у пазах 2 якого розміщують трифазну обмотку З, і обертової частини — ротора 4, що являє собою електромагніт, який живиться постійним струмом від окремого джерела через щітки 5 і кільця 6.
Статор синхронного генератора — це чавунний корпус, в якому міститься сердечник. Для зменшення втрат енергії його складають з окремих листів електротехнічної сталі, ізольованих між собою звичайно лаком.
Ротори синхронних генераторів бувають двох типів — з явно виявленими (рис. 6—1) і неявно виявленими (рис. 6—2) полюсами. Ротори з явно виявленими полюсами установлюють у генераторах з невеликим числом обертів їх звичайно з’єднують з тихохідними первинними двигунами, з гідротурбінами або з двигунами внутрішнього згоряння і називають відповідно гідрогенераторами або дизельгенераторами.
Ротори з неявно виявленими полюсами застосовують у генераторах з великим числом обертів (3000 обіхв). Ці генератори звичайно приводять у рух парові турбіни, тому їх називають турбогенераторами. Сердечники і башмаки полюсів найчастіше виготовляють з литої сталі, іноді башмаки складають з окре-
мих листів електротехнічної сталі, а для обмотки полюсів використовують мідні ізольовані проводи.
Щоб мати синусоїдальну е. р. с., треба мати синусоїдальний розподіл магнітної індукції в повітряному зазорі. Для цього полюсним наконечникам надають такої форми, що на краях полюсів повітряний зазор більший, ніж під його серединою (рис. б—3), тому під серединою полюса магнітна індукція має.максимальне значення. Полюси електромагніту розташовані й
(6-1)
хронного
генератора.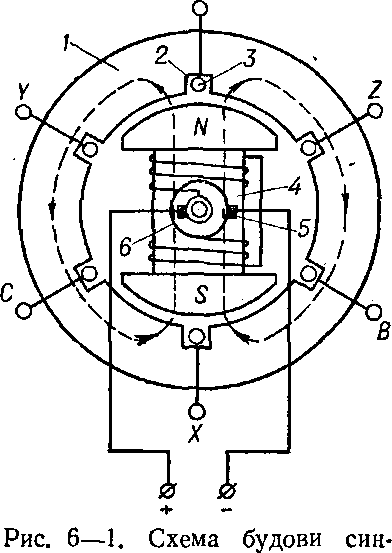


f
Якщо трифазний синхронний генератор ввімкнути в мережу, то по обмотках якоря, число полюсів якого дорівнює числу полюсів індуктора, піде трифазний змінний струм, який створює обертовий, магнітний потік (див. розд. І); швидкість його:
(6-2)
п, = -г .
Два потоки — індуктора і якоря — утворюють результуючий потік, який обертається з тією самою швидкістю пх. Отже, M1 — п, тобто число обертів результуючого магнітного поля дорівнює числу обертів ротора (індуктора). Збіг у часі двох явищ називається синхронізмом, тому такий генератор називають синхронним.
і У синхронних генераторах з неявно виявленими полюсами (рис. 6—2) синусоїдального розподілу магнітної індукції досягають відповідним розподілом намагнічуючої сили (iw), тобто зміною ампервитків. Дійсно, розглядаючи дільницю магнітного кола, що відповідає повітряному зазору, на підставі закону повного струму
можна написати:
(IW)n =
звідки
В - a (iw)n Dn — ГО / I Ln
де Bn — магнітна індукція в повітряному зазорі; [>.0 — магнітна проникність повітря; In — довжина магнітної лінії в повітряному зазорі або величина зазору.
З формули (6—3) видно, що магнітну індукцію можна змінювати, змінюючи величину зазора In або ампервитки (iw)n.
Струм збудження для синхронних генераторів подають від окремих генераторів постійного струму — збудників, які закріплені на спільному з генератором валі і приводяться в рух тією самою
O
O
А
Q
(
X
0
0 +
-
б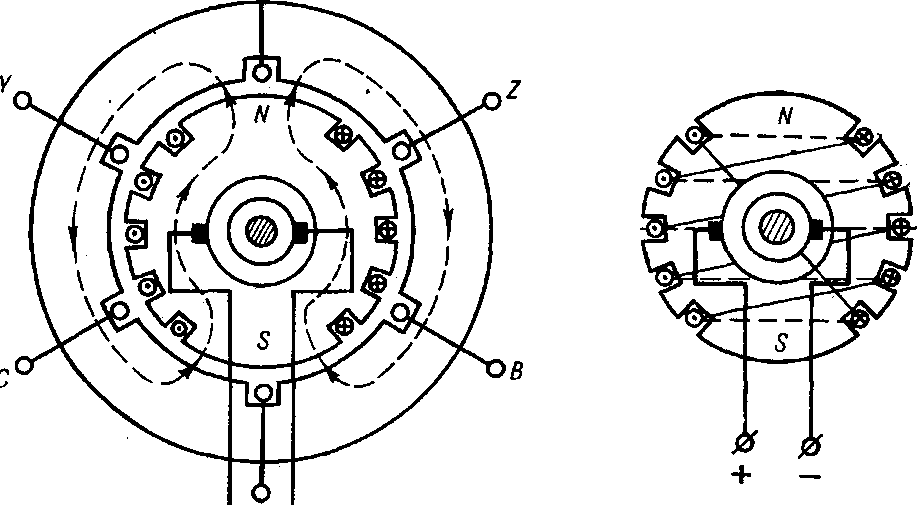
а
Рис. 6—2. а) Схема будоьи синхронного генератора з неявно вираженими полюсами і б) Схема обмотки ротора (індуктора).
турбіною, що й ротор генератора. їх потужність становить 0,25 -~ 1% від номінальної потужності основного генератора. В окремих випадках постійний струм подається через кільця в обмотку збудження від випрямлячів.
З ряду технічних міркувань вал турбогенератора і парової турбіни розміщують горизонтально (рис. 6—4).
Гідрогенератори мають вертикальний вал і розміщуються над гідротурбіною, яка обертає їх (рис. 6—5). Така установка, яка складається з генератора і гідротурбіни, може досягати висоти кількаповерхового будинку.
Промисловість нашої країни випускає турбо- і гідрогенератори, потужність яких досягає 200—300 тис. ква, а найближчим часом зросте до 500 тис. ква і більше.
Рис.
6—3.
Графік
зміни мажітної індукції при змінній
величині повітряного зазору.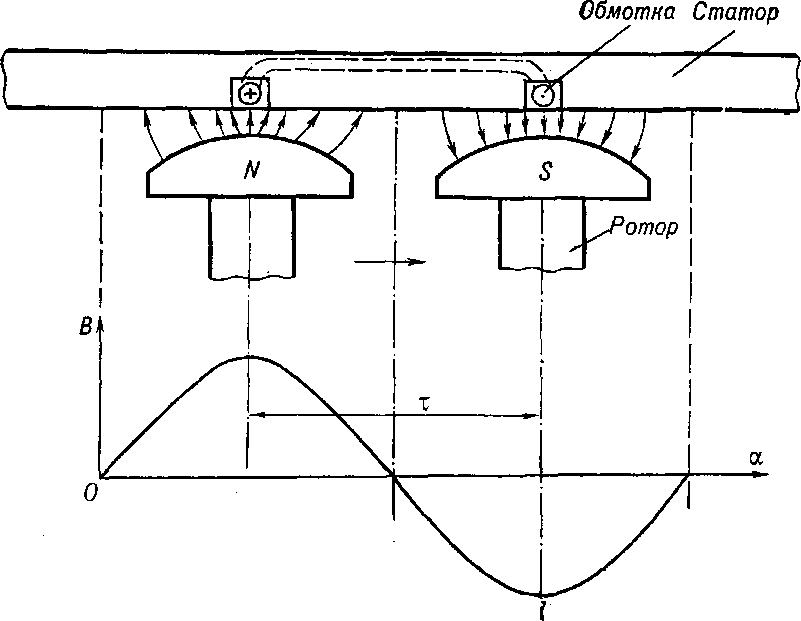
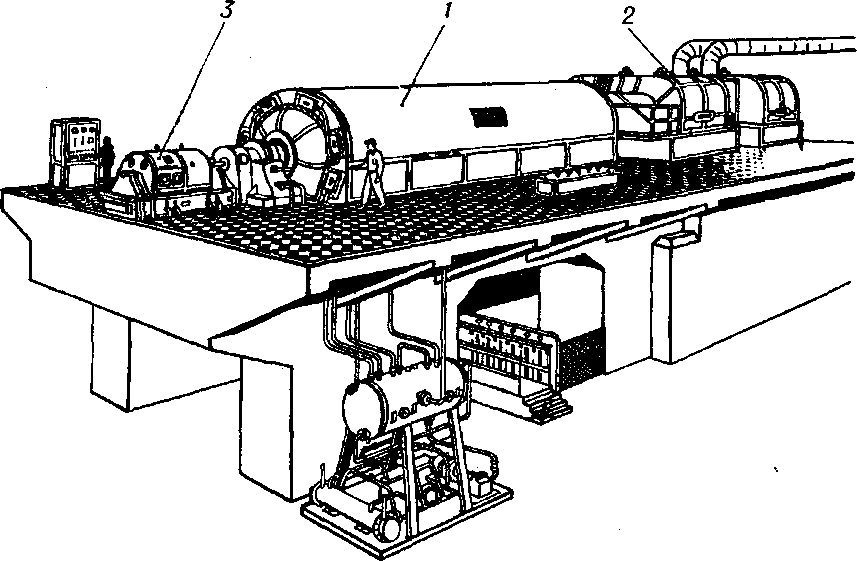
рис. fr_4. Загальний вигляд розміщення турбогенератора в машинному залі електростанції:
1 — синхронний генератор; 2 — парова турбіна; 3 збуджувач.
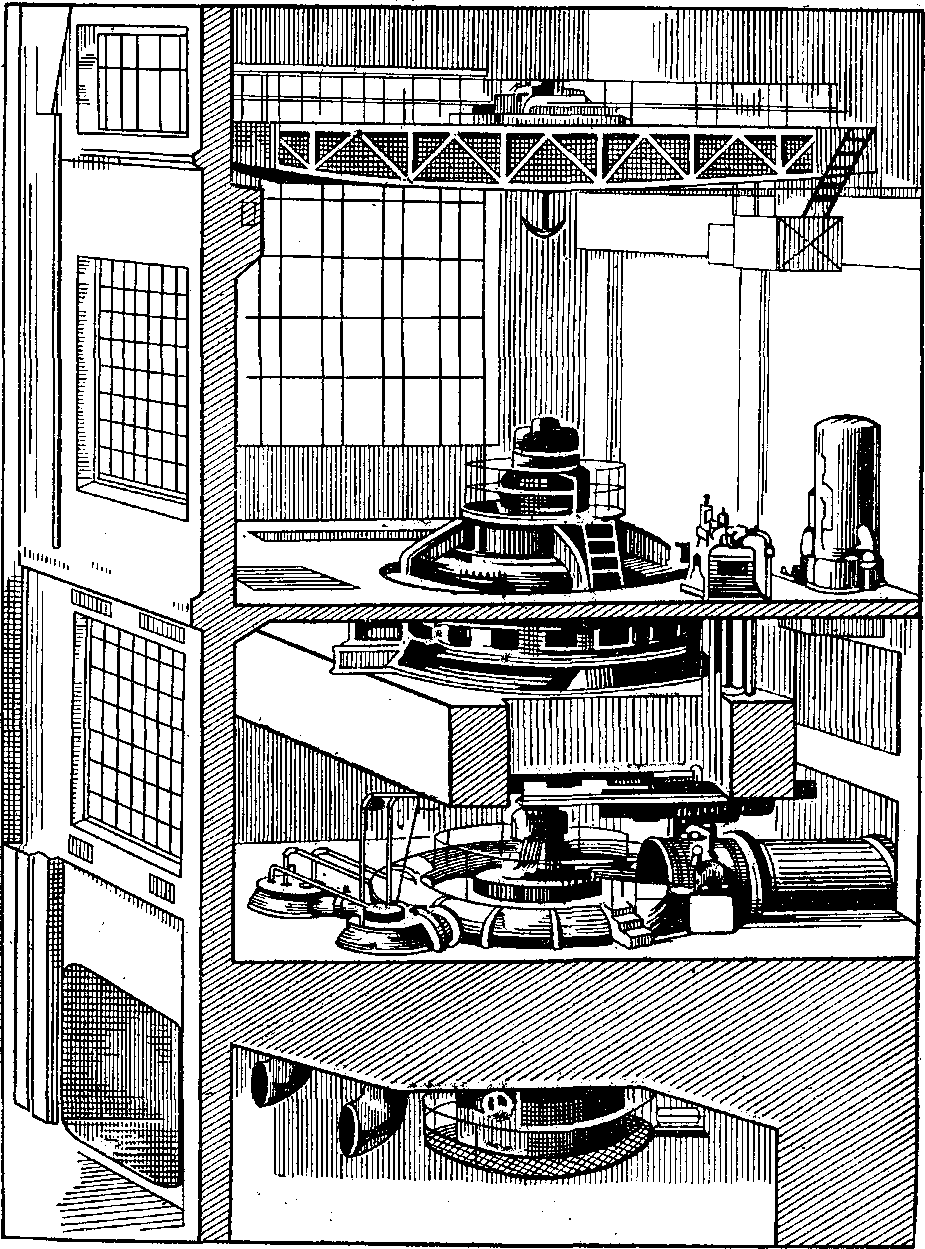
Рис. б—5. Загальний вигляд розміщення гідрогенератора в машинному
залі гідростанції.
Статорні обмотки. Обмотка статора (якір) міститься у пазах статора у вигляді витків ізольованих проводів, кінці яких відповідно між собою сполучені. Витки, які лежать в двох сусідніх пазах і сполучені послідовно, утворюють котушку-секцію (рис. 6—6). 0
П
Обмотка статора може складатися з кількох та- ; ких котушок, сполучених між собою послідовно.
Потрібне число витків в обмотці визначають за робочою напругою машини, а поперечний переріз проводів — за силою струму.
Рис.
6—6.
Ko- тушка-секція
обмотки статора.
Для роботи синхронного генератора треба, щоб число пар полюсів в індукторі і в статорній обмотці було однаковим. Питання про обмотки машин змінного струму дуже складне. Тому розглянемо найпростіші обмотки, щоб мати про них певне уявлення.
Обмотки бувають петльові і хвильові, однофазні і багатофазні, одношарові і двошарові, зосереджені і розподілені.
Рис.
6—8.
Хвильова
обмотка.
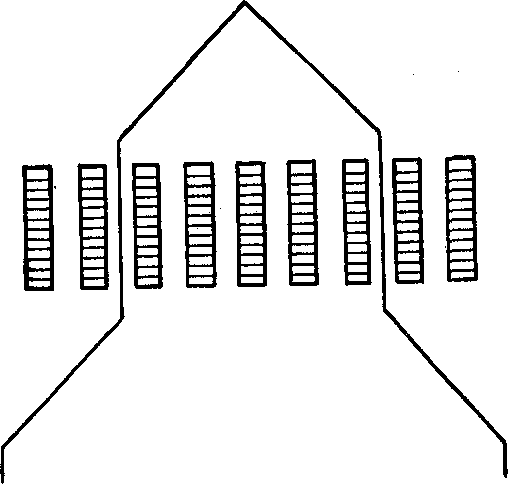
1
—
паз статора; 2
—
зубець сталі статора; З
— секція обмотки.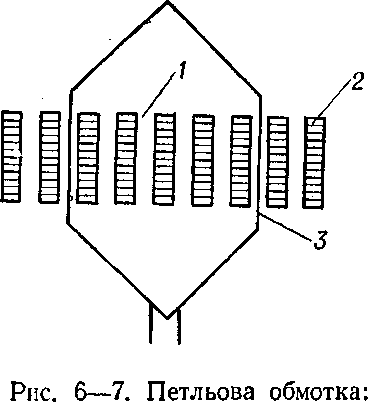
розгорнуті схеми, де циліндричну поверхню пазами і обмоткою «розгортають» у площину (рис. 6—9).
Обмотки статора характеризуються такими параметрами: z — числом пазів у сталі статора; т — числом фаз статора; р — числом пар полюсів (2 р — число всіх полюсів); q — числом пазів на полюс і фазу;
?=2^; (6-4)
τ — відстанню між серединами полюсів (полюсна поділка); у — кроком обмотки, шириною секції; уф — фазовим кроком, що
Рис.
6—9.
Розгорнута
схема зосередженої одношарової
однофазної обмотки: т
=
1; 2р
— 4;
г
=
4; q
= 1.
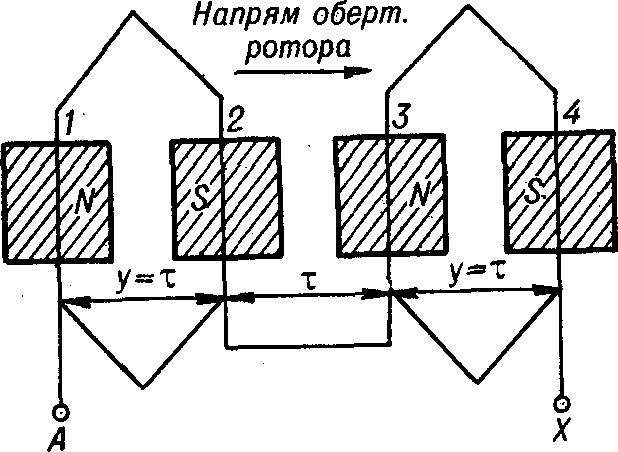
2
УФ
= ·
у і Уф — подають частками полюсної поділки або числом пазів.
На рис. 6—9 зображена найпростіша розгорнута схема однофазної обмотки. Вона складається
з двох котушок-секцій з певною кількістю витків, сполучених послідовно. Усі витки кожної сторони котушки вкладені в один паз, тобто на фазу і полюс припадає один паз: <7 = 1. Якщо пази рівномірно розміщені по колу статора на віддалі полюсного кроку τ, вкладена в них обмотка називається обмоткою з повним крокомі/ = т. Якщо замкнути коло, то при обертанні індуктора з чотирма полюсами в обмотці статора виникне е. р. с., під дією якої утвориться струм; в обмотках він створить своє магнітне поле з двома парами полюсів. Е. р. с. у кожному витку збігаються за фазою і за величиною. Вони всі рівні, тому загальна е. р.с. дорівнюватиме алгебраїчній сумі всіх е. р. с. у витках.
За час повного оберту в кожному з провідників (а отже, і в зовнішньому колі) відбудеться два повних періоди зміни струму. Якщо машина має р пар полюсів і ротор обертається, роблячи п об/хв, то частота змінного струму визначається за формулою (6—1).
На рис. 6—9 зображена зосереджена обмотка, усі провідники активних сторін якої вкладені в один паз. Така обмотка має той істотний недолік, що не використовується повністю сталь статора машини. Тому на практиці роблять розподілені обмотки, тобто такі, в яких число пазів на полюс і фазу q ф 1.
На рис. 6—10 зображена однофазна статорна розподілена обмотка з q = 3. Е. р. с., які індукуються в активних сторонах коту
шок, будуть зсунуті за фазою одна відносно одної, а результуюча е. р. с. дорівнює їх геометричній сумі. Відношення е. р. с. фази розподіленої обмотки до е. р. с. фази зосередженої обмотки називається коефіцієнтом розподілення обмотки Ap.
2τ
2τ
2
Для такої
»
обмотки треба мати три котушки на кожну пару полюсів.
Розрахуємо і накреслимо схему найпростішої одношарової розподіленої трифазної обмотки статора з повним кроком, якщо Z= 12, т — З, 2р — 4; тоді
12
ШПШШ
ІШШ

12
4
·
З 12 4
2
З
Рис.
6—10.
Розгорнута
схема розподіленої однофазної обмотки:
г
=
12;
т
=
1;
2р
=
4; q = 3.
2
р
■ т
-τ~
2р
Рис.
6—11.
Схема
найпростішої трифазної одношарової
обмотки статора синхронного генератора.
Першу
фазу А
починаємо з паза 1
(рис.
6—11).
Щоб
визначити паз, в якому лежить друга
сторона секції, до номера паза
додаємо у:
1
+ у
—
=
1+3 = 4.
Щоб
визначити паз, в якому треба укласти
початок наступної котушки, до номера
паза кінця першої котушки додаємо τ:4
+ τ = 4+ 3 = 7 і
т. д.
Друга
котушка першої фази, кінець якої
позначений X,
закінчиться
в пазу 10.
Щоб
визначити паз, в якому треба укласти
початок фази В,
до паза початку першої фази додаємо
уф
: 1
+ уф
=
1 + 2 = 3. Другу
фазу (В—У)
починаємо з паза 3
і
розраховуємо її так само. Третя фаза
починається з паза 5.
На
практиці обмотки статорів синхронних
генераторів роблять двошаровими з
укороченим кроком і з великою кількістю
витків.
=
3; 3 = 2.
Уф=



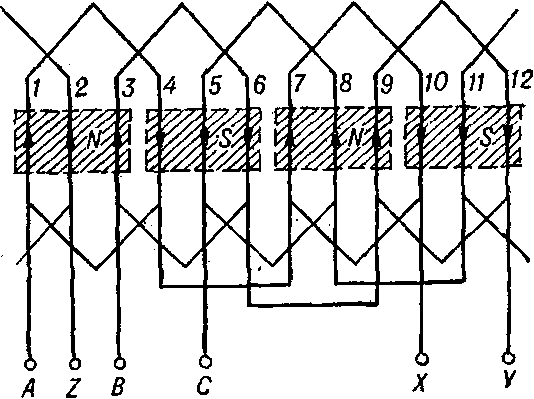
Укорочення кроку поліпшує форму кривої е. р. с. і дає економію міді в лобових з’єднаннях.
Зменшення е. р. с., індукованої у фазі обмотки, внаслідок розподілення обмотки і укорочення її кроку враховується так званим обмотковим коефіцієнтом ko6, який дорівнює добутку коефіцієнтів розподілення і укорочення: k0e = kp ■ ky. (6—6)
2. СИНХРОННИЙ ГЕНЕРАТОР В РЕЖИМІ ХОЛОСТОГО ХОДУ
Холостий хід синхронного генератора — це такий режим його роботи, коли він не ввімкнений у сітку, тобто на затискачах генератора є номінальна напруга, але струм навантаження дорівнює
ста
Рис.
6—12.
Схема
синхронного генератора.
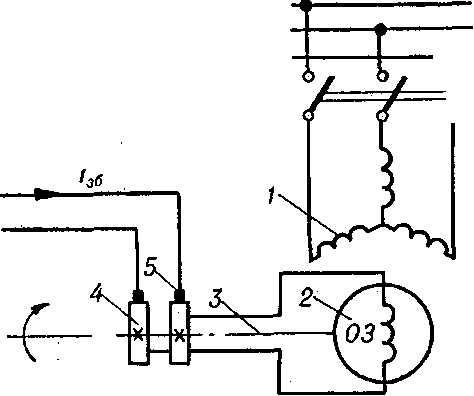
Під час пуску вал генератора З (рис. 6—12), який з’єднаний
з двигуном, приводиться в обер-
Ч тальний рух. Число обертів ротора доводять до номінального значення. Потім до обмотки збудження (о. з.) ротора 2 через щітки 5 і кільця 4 подають постійний струм від окремого джерела постійного струму (звичайно це шунтовий генератор). Величину струму збудження можна змінювати від нуля до певного максимального значення, що дає змогу регулювати напругу генератора. Струм збудження
створює магнітний потік Ф0, який, рухаючись разом з ротором, перетинатиме обмотку статора 1 і за законом магнітної індукції наводитиме в кожній її фазі е. p. с. E0:
E0 = 4,Шоб WfO0, (6—7)
де k0e — обмотковий коефіцієнт, який ураховує зменшення е. р. с. внаслідок розподілу обмотки і укорочення кроку. Звичайно k = = 0,92 — 0,94; w — число витків однієї фази статора, сполучених послідовно.
Оскільки / = gg , то при / = 50 гц — const число обертів
ротора синхронного генератора повинно бути сталим і залежить тільки від числа пар полюсів р машини: лр=і = 3000; пр=2 = = 1500, tip=з = 1000 і т. д.
Якщо у формулу (6—7) підставити значення / = ^, то дістанемо: E0
де
const.
(6-9)
44w
~
’
60
Таким
чином, е. р. с. синхронного генератора
пропорційна швидкості обертання і
магнітному потоку ротора. При сталій
частоті кількість обертів п
також буде стала. Отже, значення е. p.
с.
E0
визначається
тільки величиною діючого потоку Ф0
машини і називається е. р. с. холостого
ходу.
90'
Рис.
6—13.
а)
Векторна діаграма синхронного
генератора в режимі холостого ходу; б)
Характеристика
холостого ходу.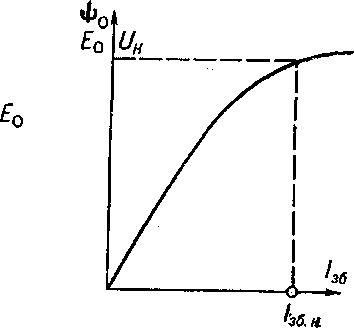


На рис. 6—13, а зображено векторну діаграму синхронного генератора при холостому ході.
Г
За формулою (6—8) е. р. с. статора при незмінній швидкості U = const пропорційна потоку, тому залежність E0 від /зб подібна до залежності
магнітного потоку від струму збудження. У початковій частині залежність E0 від I36 практично лінійна; надалі, у зв’язку з магнітним насиченням, характеристика набирає вигляду кривої намагнічування. На характеристиці можна вибрати робочу точку, яка відповідає номінальній напрузі генератора Uh. Якщо при навантаженні генератора напруга спадає, то її регулюють, змінюючи струм збудження.
3. РОБОТА СИНХРОННОГО ГЕНЕРАТОРА ПІД НАВАНТАЖЕННЯМ. РЕАКЦІЯ ЯКОРЯ
Якщо до затискачів генератора (рис. 6—12) приєднати зовнішнє навантаження, то під дією E0 як по зовнішньому колу, так і по обмотці статора (якоря) піде струм Ія. Величина і фаза цього струму залежатимуть від е. р. с. генератора, а також від активного та реактивного опорів зовнішнього кола і самого генератора. Струм, що проходить по якорю, створює свій магнітний потік. Частина цього потоку замикається тільки навколо проводів якоря (рис. 6—14) і називається потоком розсіювання Ф8, замикається через повітряні зазори і полюси ротора. Потік Фа є обертовим по-
током, створюваним трифазним струмом, який обертається синхронно з полем ротора Ф0. Таким чином, потоки Ф„ і Фа збігаються за просторовим розміщенням і обертаються з однаковою швидкістю, утворюючи єдиний магнітний потік машини:
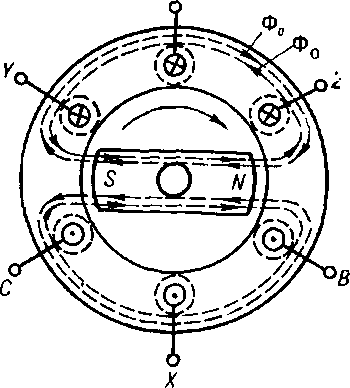 Ф
=
Ф0
+
Ф~.
Ф
=
Ф0
+
Ф~.
А
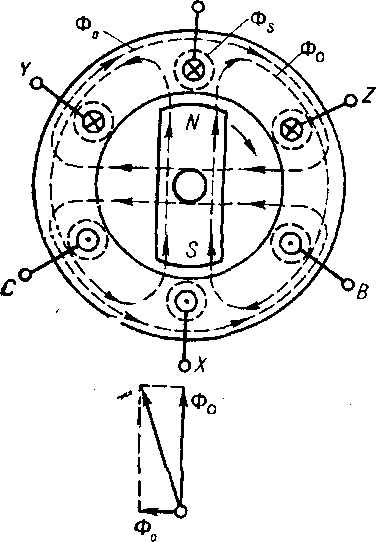
А
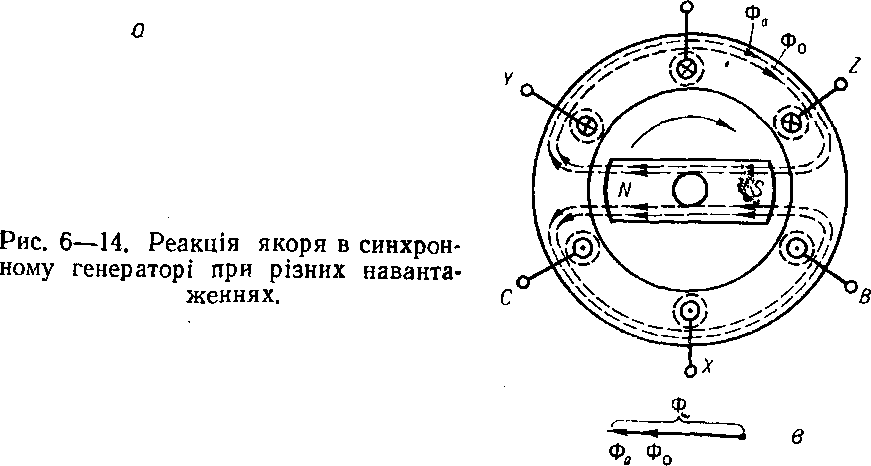
Потік Фа, накладаючись на основний потік полюсів Ф0, ослаблює або підсилює його. Вплив н. с. якоря на основне магнітне поле називається реакцією якоря. Вісь потоку Фа відносно потоку ротора Ф0 визначається характером навантаження: активне, індуктивне, ємнісне, мішане. Ці два потоки додаються геометрично. На рис. 6—14 зображено векторні діаграми магнітних потоків для різних навантажень. У всіх випадках розглядається момент, коли
у фазі А струм має максимальне значення (і а — Im); вісь потоку Ф„ (результуючий потік усіх трьох фаз) у всіх випадках зображують горизонтальною лінією, перпендикулярно до площини котушки А — Х.
Активне навантаження. На рис. 6—14, а активні проводи фази AX обмотки якоря лежать проти середини полюсів ротора. Наведена у фазі е. р. с. і струм матимуть одночасно найбільші значення, тому що вони збігаються за фазою. Струми в обмотці якоря створюють потік Фа, магнітні лінії якого замикаються поперек полюсів; такий потік називається поперечним. Сумарний магнітний потік у повітряному зазорі зображено на векторній діаграмі. Ефект реакції — сумарний магнітний потік — за величиною залишається майже незмінним, але трохи змінює свій напрям внаслідок того, що потік якоря ослаблює потік полюсів у набігаючих половинах і посилює його в збігаючих половинах полюсів.
Індуктивне навантаження (рис. 6—14, б). При індуктивному навантаженні генератора струм у кожній фазі якоря відстає за
а
Отже,
момент,
Рис.
6—15.
Зовнішні
характеристики синхронного генератора
при активному (1),
активно-індуктивному (2)
і
активно-ємнісному
(5)
навантаженнях.
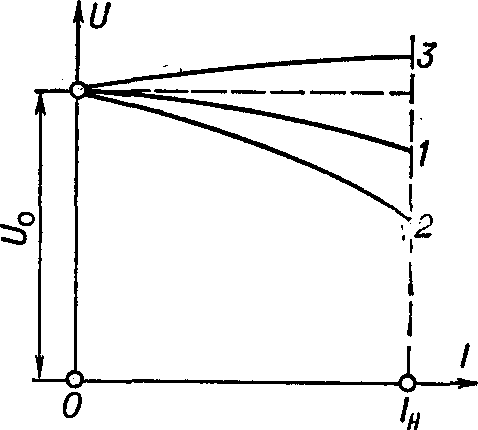
Ємнісне навантаження (рис.6—14,е).
Струм випереджає е. р. с. на чверть періоду. Максимальне значення струму у фазі А настане за чверть періоду до того, як вісь ротора розміститься так, як це було у випадку активного навантаження. Потоки Ф0 і Фа збігаються за напрямом, реакція якоря намагнічує основний потік машини, збільшуючи його і е. р. с. Е.
Зміну е. р. с., а отже, і напруги на затискачах генератора при навантаженні можна легко простежити за робочою або зовнішньою характеристикою, яка показує залежність U = /(/) при ізб — const, n=Const (рис. 6—15). Початковою точкою
характеристики є значення напруги U0, яка дорівнює рівній E0 при холостому ході. Із збільшенням навантаження напруга генератора значно змінюватиметься, причому по-різному залежно від характеру навантаження.
Першою причиною зміни напруги є спад її в обмотках статора, другою — реакція якоря. Відносна зміна напруги генератора при номінальному струмі Ih досить значна:
AU % = · 100% да (25 40%),
де U0 — напруга при холостому ході;
Uh — напруга при номінальному струмі.
Нормальна робота споживачів електричної енергії можлива лише при стабільній напрузі. Для підтримання стабільної напруги
Рис.
6—16.
Регулювальна
характеристика синхронного генератора
при активному (1),
активно-індуктивному (2)
і
активно-ємнісному (3)
навантаженнях.
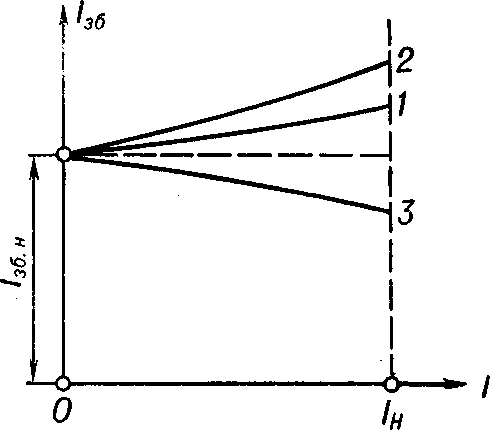
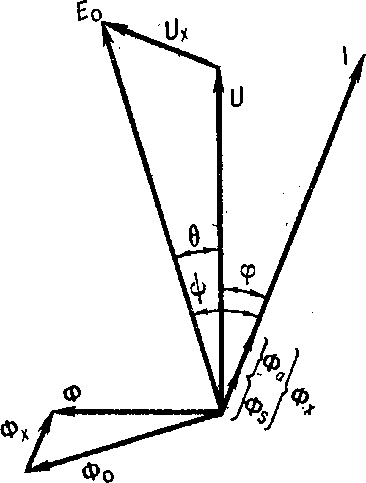 Щоб
краще уявити фізичну сторону зміни
напруги, накреслимо векторну діаграму
синхронного генератора при
активно-індуктивному навантаженні
(рис. 6—17).
Головним
потоком Ф0
індукується е. р. с. E0,
яка
відстає від Ф0
на π/2.
Під
дією E0
в
колі виникає
Щоб
краще уявити фізичну сторону зміни
напруги, накреслимо векторну діаграму
синхронного генератора при
активно-індуктивному навантаженні
(рис. 6—17).
Головним
потоком Ф0
індукується е. р. с. E0,
яка
відстає від Ф0
на π/2.
Під
дією E0
в
колі виникає
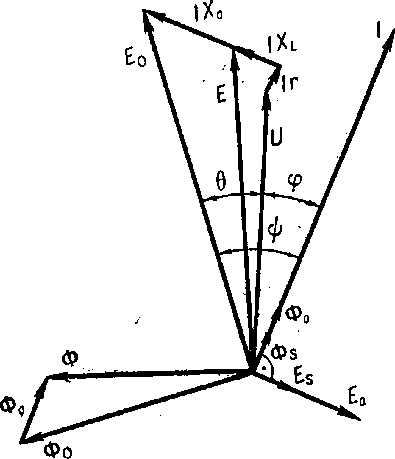
Рис. 6—17. Векторна діаграма Рис. 6—18. Спрощена векторна синхронного генератора при діаграма синхронного генератора активно-індуктивному наванта- при активно-індуктивному навантаженні. женні.
струм /я, який відставатиме від E0 на певний кут ψ. Струм /я в обмотці статора створить потік розсіювання Ф5 і потік Фа, які за напрямом збігаються з струмом, якщо не враховувати вплив гістерезису і вихрових струмів. Потік розсіювання Ф5 наводить в обмотці статора е. р. с. розсіювання або самоіндукції — Es або Eu а потік реакції якоря Фа — е. p. с. Ea, які відстають від відповідних потоків на кут 90°.
Додаючи потоки Ф0 і Фа, дістанемо результуючий потік Ф. Цей потік наводить в обмотці статора е. р. с. Е, яка менша від е. p. с. E0 на величину Ea: E = E0 — Ea.
Нехтуючи активним спадом напруги Ir, який менший від одного процента номінальної напруги, напишемо рівняння:
I0 = O + IXl + TXa = O + IX = O + Ux. (6-10)
У,
V90'
Ізр
0
U2
ьи{
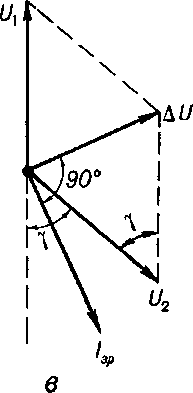 Спрощена
векторна діаграма синхронного
генератора згідно з (6—10)
зображена
на рис. 6—18.
Кут
зсуву фаз між е. р. с. і напругою
позначено Θ,
між
е. р. с. і струмом — ψ1(
а
між напругою і струмом — φ.
Спрощена
векторна діаграма синхронного
генератора згідно з (6—10)
зображена
на рис. 6—18.
Кут
зсуву фаз між е. р. с. і напругою
позначено Θ,
між
е. р. с. і струмом — ψ1(
а
між напругою і струмом — φ.

Рис. 6—19. Векторні діаграми при паралельній роботі синхронних генераторів:
а — в момент вмикання Ut = Ut\ б — в момент вмикання Ut Ф U%\ в — кут між векторами напруги не рівний 180°, Ux =» Ut.
4. ПАРАЛЕЛЬНА РОБОТА СИНХРОННИХ ГЕНЕРАТОРІВ
На електричних станціях установлюють кілька генераторів, які працюють паралельно, віддаючи свою енергію на спільні шини.
Залежно від потрібної потужності вмикають таку кількість генераторів, яка б забезпечувала повне навантаження кожного з них. Це збільшує к. к. д. генераторів і поліпшує використання устаткування.
Для ввімкнення на паралельну роботу синхронних трифазних генераторів треба, щоб виконувались такі умови:
Напруги діючого генератора Uі (або напруга мережі) і генератора, який під’єднують, U2, повинні бути рівними: U\ = U2.
Напруги генераторів повинні бути зсунуті за фазою один відносно другого на 180° (рис. 6—19, а), а відносно споживачів — діяти узгоджено, тобто збігатися за фазою.
Частота генераторів повинні бути рівними: /х = /2.
Чергування фаз генераторів повинно бути однаковим: A1, B1, C1 і A2, Bi, C2.
Розглянемо, які явища виникають в генераторах при порушенні цих умов.
Якщо напруги генераторів не однакові, U1 > U2, а інші умови виконані, то в обмотках генераторів виникає зрівняльний струм I3p (рис. 6—19, б). Оскільки активний опір обмоток дуже малий і ним звичайно нехтують, то можна вважати, що обмотки генераторів
б
Рис.
6—20.
Зміна
напруг з часом: а
—хвильова діаграма U1
I U1
при
f,
+
f,; б
— напруга биття.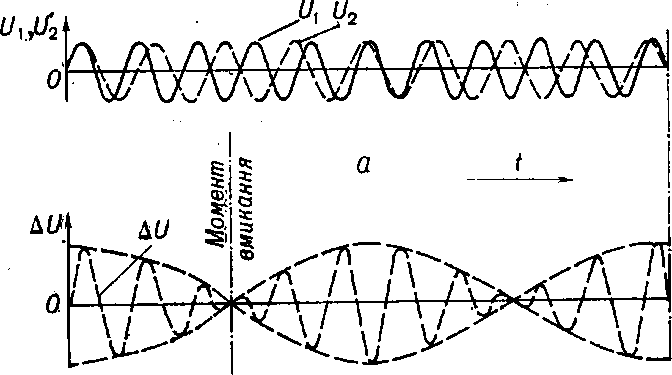
мають тільки індуктивний опір. Тому зрівняльний струм буде реактивний і відставатиме за фазою від вектора AU на кут 90°. Для генератора з більшим значенням напруги зрівняльний струм будевідстаю- чим; він створює розмагнічуючий магнітний потік якоря, що зменшує магнітний потік полюсів, внаслідок чого напруга на затискачах цього генератора знизиться до значення U. Для генератора з меншою напругою зрівняльний струм буде випереджальним; він створює намагнічуючий потік якоря, який додається до магнітного потоку полюсів, внаслідок чого напруга другого генератора підвищиться до значення U. Отже, зрівняльний струм зрівноважує напруги генераторів. Але він перевантажує обмотки генераторів, що не дає можливості використати їх на повну потужність, і створює додаткові втрати енергії на нагрівання обмоток статора.
Якщо при вмиканні генератора на паралельну роботу вектори їх напруг рівні між собою U1 = U2, але зсунуті за фазою на кут, менший за 180° (рис. 6—19, в) внаслідок того, що ротори цих генераторів зсунуті на кут 180° — γ, то в обмотках генераторів виникне зрівняльний струм. Цей струм зумовлений напругою AU, що дорівнює геометричній сумі напруг U1 і U2.
AD = V1 + O2.
Зрівняльний струм буде зсунутий за фазою відносно AU на кутг близький до 90°. Він майже збігатиметься за фазою з напругою другого генератора U2, тобто він для нього буде активним струмом. Виникнення цього струму в обмотці статора спричинить раптове навантаження генератора, що створює механічний поштовх на ротор у напрямі, зворотному напряму обертання генератора.
Зрівняльний струм відносно напруги першого генератора U1 зсунутий на кут, близький до 180°. Виникнення цього струму в обмотці статора першого генератора спричинить механічний поштовх на ротор у бік його обертання. Отже, зрівняльний струм у цьому випадку своєю дією поставить ротори обох генераторів у таке положення, яке забезпечить зсув фаз між напругами на 180°. Ці поштовхи, особливо при великих кутах γ, можуть призвести до аварії.
При нерівності частот генераторів /, Ф J2 (рис. 6—20) матимемо випадок, аналогічний до попереднього, з тією лише різницею, іщ> кут γ і величина напруги AU безперервно змінюватимуться. Величина напруги AU змінюється від нуля до 2 ί/ψ і називається напругою биття. З векторної діаграми (рис. 6—19, в) маємо:
= ^sin-I; AU = 2i/2siny. (6-11)
При γ = 0 AU = 0; при γ = 180° AU = 2U2.
Момент вмикання генератора на паралельну роботу треба вибрати таким, щоб напруга биття дорівнювала нулю: AU = 0.
Усі операції по підготовці генератора до його вмикання на паралельну роботу називають синхронізацією, а прилади, що показують момент вмикання, синхроноскопами.
Існують лампові і стрілочні синхроноскопи. Розглянемо синхронізацію за допомогою лампового синхроноскопа.
При синхронізації двох генераторів напругу на їх затискачах перевіряють вольтметрами, а частоту — частотомірами. Щоб змінити напругу генератора, змінюють струм збудження, а частоту — числом обертів ротора, за рахунок витрати пари або води в турбіні. Чергування фаз перевіряють фазопокажчиком. Момент вмикання (ламповим синхроноскопом) визначають двома способами, які ми й розглянемо.
Якщо між затискачами генераторів увімкнути лампи розжарювання (рис. 6—21), розраховані на подвійну фазну напругу, то вони під дією змінної напруги AU то потухатимуть, то загорятимуться. Це явище використовується для синхронізації генераторів. Якщо лампи приєднати до однойменних фаз (рис. 6—21, а), то дістанемо схему вмикання ламп «на згасання». Паралельно одній з ламп вмикають нульовий вольтметр, чутливий на початку шкали. Вмикати генератори на паралельну роботу слід тоді, коли лампи погаснуть, а стрілка нульового вольтметра підходитиме до нуля. Векторна діаграма напруг трифазного генератора в момент їх вмикання
на паралельну роботу наведена на рис. 6—22. Якщо при дій схемі лампи гаснутимуть неодночасно, а по черзі, то де свідчить про те, що порядок чергування фаз генераторів неоднаковий. Щоб змінити чергування фаз, треба поміняти місцями два будь-яких проводи, які сполучені з одним з генераторів.
Для синхронізації найчастіше застосовують схему вмикання ламп «на обертання світла» (рис. 6—21, б). У цьому випадку одну лампу приєднують до одноймен-них фаз, а дві інші — до різнойменних. Паралельно лампі, приєднаній до однойменних фаз, вмикають нульовий вольтметр. При деякій різниці частот генераторів лампи
Рис.
6—21.
Синхронізація
генераторів: а
— вмикання ламп «на погасання»; б
— вмикання ламп «на обертання світла».
а б

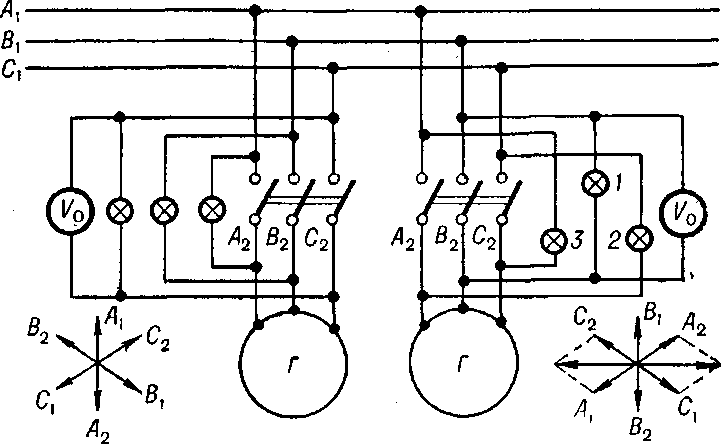
по черзі гаснутимуть і загорятимуться. Оскільки лампи в ламповому синхроноскопі розміщують по колу, то відбувається так зване «обертання світла». Коли ротор під’єднаного генератора обертається швидше, ніж працюючого, то світло обертається за годинниковою стрілкою, а якщо повільніше від працюючого, то проти стрілки годинника.
Таким чином, при цьому способі синхронізації видно, як обертається під’єднаний генератор — швидше чи повільніше від працюючого і в яку сторону треба змінювати його напрям обертання. Це є перевагою синхронізації «на обертання світла». Генератор на паралельну роботу вмикають тоді, коли обертання світла припиняється, лампа, ввімкнена до однойменних фаз, погасне, стрілка нульового вольтметра підійде до нуля, а дві інші лампи горітимуть однаково яскравим світлом.
Нульовий вольтметр ставлять для того, щоб точно визначити різницю напруги між генераторами, чого за допомогою самих ламп
зробити не можна, бо при напрузі на лампах, яка становить 15—20% від Uh, їх нит- UxCosff=E0 ки не розжарюються. Ці способи синхронізації називаються точною синхронізацією. Способи точної синхронізації не дають можливості швидко вмикати генератори на паралельну роботу, особливо при аварійних режимах, коли напруга і частота коливаються в широких межах.
Рис.
6—22.
Векторна
діаграма генератора (до виводу
момента
синхронного
генератора).
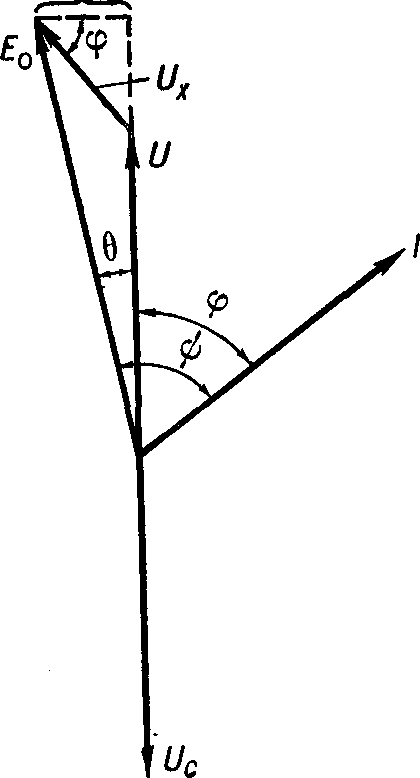
Суть способу самосинхронізації полягає ось у чому: генератор, який обертається первинним двигуном з числом обертів, що може відрізнятися на 2—5% від номінального, вмикають у мережу без збудження. Відразу після цього в його обмотку збудження подають струм збудження, внаслідок чого він протягом 1—2 сек. втягується в синхронізм.
При вмиканні генератора в сітку його обмотка збудження повинна бути замкнута на розрядний опір, що дорівнює 5—10 разовому опору обмотки збудження, щоб зменшити напругу на її затискачах у момент пуску і уникнути її пошкодження.
На сучасних електростанціях синхронізацію здійснюють спеціальні автоматичні пристрої.
5. ОСОБЛИВОСТІ ЕКСПЛУАТАЦІЇ СИНХРОННИХ ГЕНЕРАТОРІВ
У процесі експлуатації синхронних генераторів, що працюють паралельно на спільну мережу, черговому персоналу доводиться перерозподіляти активне і реактивне навантаження згідно з графіками навантаження. Розглянемо фізичну сторону явищ, які виникають при перерозподілі навантаження генераторів.
А. Регулювання активного навантаження. При паралельній роботі синхронного генератора в потужній системі його напруга і частота не можуть довільно змінюватись, вони завжди дорівнюють напрузі і частоті системи.
Активну електричну потужність, яку віддає генератор, можна зобразити відомою формулою:
де U і I — діючі значення фазної напруги і струму. Механічна потужність, яка передається генератору первинним двигуном, визначається за формулою: Рмех — шрот М, де M — протидіючий електромагнітний момент генератора;
Mpom — кутова швидкість обертання ротора.
У генераторі механічна потужність перетворюється в еквівалентну електричну потужність.
Нехтуючи втратами в генераторі і прирівнюючи електричну та механічну потужності, знайдемо електромагнітний момент генератора:
^ Wl COS φ 0W ’
де Шрот — число обертів ротора за хвилину. Ураховуючи,
„„„„„ ^ттіп ™по [„ _ 60/
що число обертів ротора дорівнює числу обертів поля J^n1 =
дістанемо:
м = Р_МЛ_Cos1i (6—13)
Корисна робота первинного двигуна полягає в подоланні цього протидіючого електромагнітного моменту. Затрачена механічна потужність первинного двигуна поновлюється у формі еквівалентної активної електричної потужності. Із спрощеної векторної діаграми (рис. 6—22) генератора, що працює паралельно з мережею, маємо:
£
U xcosf-E0SinQ; Ux= їх; I cos <р =-^ · sin Θ.
Підставляючи / cos<p в (6—13), дістанемо:
М = % ' “Г sin θ· (6-14)
Якщо U і E0 у вольтах, х — індуктивний опір синхронного генератора в омах, то M матимемо в джоулях або в ньютон-метрах.
Якщо струм збудження генератора не змінюється /Зб = const, то і е. р. с. E0 = const. При роботі генератора на потужну мережу його напруга також є незмінною U = const. У такому разі в рівнянні (6—14) усі величини, крім sin Θ, є сталими і електромагнітний момент стає функцією кута Θ:
M = csin9, (6—15)
З р UE0 де C = TTf- —г ■
м 2 Kf X
Фізична картина явищ у синхронному генераторі при зміні його активної потужності подана на рис. 6—23.
При холостому ході Θ = 0 роторний магнітний потік симетрично замикається по ротору і статору. Але між різнойменними полюсами існують сили взаємного притягання, які умовно зображені на рис. 6—23 у вигляді спіральних пружин. Коли полюси статора і ротора містяться один проти одного, корисний обертаючий момент первинного двигуна і протидіючий електромагнітний момент генератора дорівнюють нулю. Первинний двигун витрачає певну потужність лише для покриття втрат холостого ходу. Якщо збільшити потужність первинного двигуна, то ротор генератора піде вперед на кут Θ (рис. 6-23, б). Це той самий кут Θ, який позначений на векторній діаграмі (рис. 6—22), тому що вісь магнітного потоку в роторі відповідає вектору E0, а вісь потоку в статорі — вектору U.
Статор
Рис.
6—23.
Взаємне
розміщення магнітних систем статора
і ротора: а
—
при холостому ході; б
— при активному навантаженні.
а
б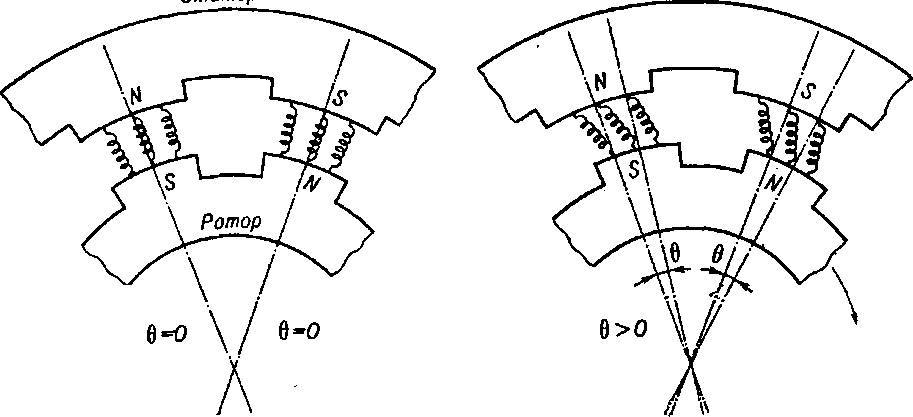
У генераторі виникає електромагнітний гальмовий момент, який намагається повернути ротор у попереднє положення. Потужність первинного двигуна перетворюється в генераторі в активну електричну потужність P — ЗUI cos φ. Оскільки U = const, то зміна потужності первинного двигуна зв’язана із зміною струму, що надходить у мережу. Електромагнітний гальмівний момент, який виникає при цьому, зрівноважує механічний момент, внаслідок чого настає нова рівновага. Отже, коли ротор генератора йде попереду поля статора, потужність передається від ротора статору і потім у мережу. Це так званий режим генератора синхронної машини. Активна потужність генератора змінюється тільки із зміною потужності первинного двигуна (зміною подачі пари в парову турбіну, або води — в гідротурбіну).
Б. Стійкість паралельної роботи синхронних генераторів. Електромагнітний момент синхронного генератора пропорційний
синусу кута 6 між векторами U і E0: M = C sin Θ. Ця залежність зображена кривою на рис. 6—24.
Рис.
6—24.
Кутова
характеристика синхронного генератора.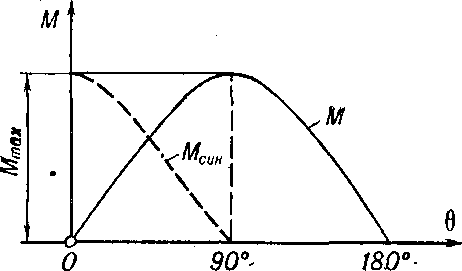

Робота генератора є стійкою, якщо додатному приросту кута ΔΘ відповідає також додатний приріст електромагнітного моменту
AM. Відношення —■ е мірою синхронізуючого моменту. Переходячи до диференціалів, матимемо:
Mcuh = ^ = COS Θ = C COS 9 = Mm COS Θ. (6-16)
На рис. 6—24 крива синхронізуючого моменту зображена пунктиром. З рисунка видно, що при Θ = 90° синхронізуючий момент дорівнює нулю, і генератор випадає з синхронізму. Щоб синхронна робота була стійкою, кут Θ беруть Θ < 25°.
Здатність синхронного генератора зберігати синхронний зв’язок із системою при аварійних режимах, наприклад при коротких замиканнях у лініях, характеризується динамічною стійкістю.
В. Регулювання реактивного навантаження синхронного генератора при паралельній роботі. На рис. 6—25 зображена векторна діаграма для трьох випадків струму збудження. Найбільшому струму збудження відповідає е. р. с. Е'0, а найменшому — е. р. с. Ед. Потужність первинного двигуна, а отже, активна потужність генератора, яку він віддає в мережу, незмінна:
P = 3UI cos φ = const.
Оскільки напруга на затискачах генератора дорівнює напрузі мережі, то вона буде сталою U — — Uc = const.
Тоді I cos φ = const і E0 sin θ = const.
З векторної діаграми видно, що при пе- резбудженні E10 > U і струм генератора відстає від напруги генератора на кут φ'. При недозбудженні Е„ < U і струм/"' випереджає напругу U на кут φ'". Вектор E0 переміщається вздовж прямої, паралельної вектору напруги U. Як бачимо, при сталій активній потужності генератора P = const залежно від струму збудження струм навантаження змінюється за величиною і характером (активно-індуктивний, активний або активно-ємнісний), але його активна складова залишається сталою. Отже, із зміною струму збудження змінюється реактивна складова струму генератора, а отже, і реактивна потужність. Найменшого значення струму /" при певній потужності досягають при такому струмі збудження, коли φ = 0.
£oSin6=const
Рис.
6—25.
Векторна
діаграма синхронного генератора для
різних струмів збудження при P=Const.

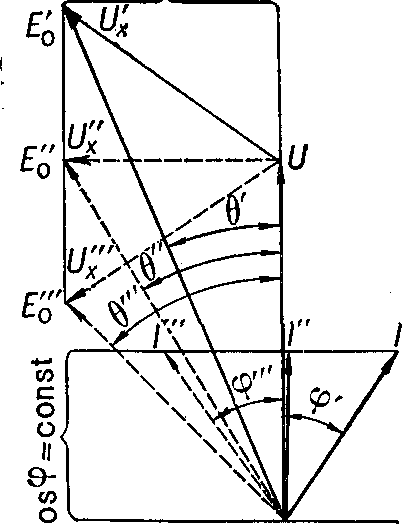
If Недозб Перезб
Регулювання струму збудження в генераторі, який працює
Рис.
6—26.
U-подібні
криві синхронного генератора.
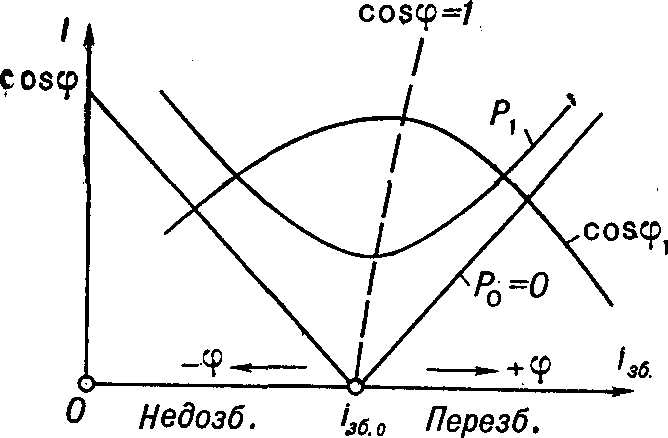
Регулювання збудження одного генератора, який працює паралельно з системою, приводить до перерозподілу реактивного навантаження між генераторами. Збільшуючи струм збудження, приймають реактивне навантаження на генератор, зменшуючи його, передають реактивне навантаження іншим генераторам. При цьому напруга в системі змінюється, але мало. Регулюючи струм збудження одночасно в кількох генераторах, що працюють паралельно, можна змінити напругу, залишивши без змін розподіл навантаження між ними. Підвищуючи напругу на одній із станцій і зни
жуючи її на другій, можна перерозподілити реактивне навантаження між цими станціями. Якщо одночасно змінювати напругу всіх станцій (струмом збудження), можна змінити напругу в системі, не змінюючи розподілу реактивного навантаження між генераторами.
6. ВТРАТИ В СИНХРОННОМУ ГЕНЕРАТОРІ І КОЕФІЦІЄНТ КОРИСНОЇ ДІЇ
У генераторі механічна енергія перетворюється в електричну з втратами. Це — неминуче. Основними втратами є втрати в обмотках (у міді), магнітні втрати в стальних сердечниках і механічні втрати.
Втрати в обмотці статора визначають за формулою: Р0в — = тІ2г, де т = 3 — число фаз обмотки; г — активний опір однієї фази. Втрати в обмотці збудження (ротора генератора) P0,3 = = ІІбГзб, де ґав — опір усього кола збудження, включаючи опори регулювальних реостатів.
Рис.
6—27.
Залежність
к. к. д. синхронного генератора від
навантаження при різних значеннях cos
φ.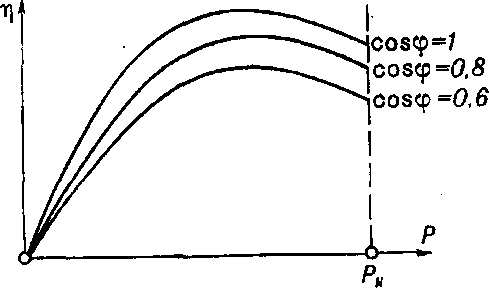
Магнітні втрати (або втрати в сталі на гістерезис і вихрові струми) виникають тільки в сердечнику статора і залишаються сталими незалежно від навантаження. У роторі магнітні втрати дорівнюють нулю, тому що магнітне поле статора обертається синхронно з ротором і не перетинає сердечника. Механічні втрати Ptlex виникають у підшипниках між щітками і кільцями; є також вентиляційні втрати, в зв’язку з пропусканням повітря для охолодження. Вони є значними в швидкохідних турбогенераторах. Для їх зменшення застосовують не повітряне, а водневе охолодження, яке збільшує потужність і к. к. д. генератора. Густина водню в 14,5 раза менша від густини повітря, а тому при обертанні ротора у водні втрати від тертя в багато разів зменшуються. Крім того, водень має високу теплопровідність — у 7,4 раза більшу, ніж по
вітря. Це дає можливість збільшити потужність генератора. Якщо позначити всі втрати через Sp, то к. к. д. генератора
Рел 3Uf COStp с
т) = =- = і—- . (6—17)
Рел + ΣΡ 3t//cos?-b£>
К. к. д. середніх генераторів лежить у межах 0,94—0,96, а великих — 0,98—0,99.
На рис. 6—27 зображено криві η = f(p) залежності к. к. д. від навантаження генератора. Як видно з рисунка, найбільший к. к. д. буває при навантаженнях, близьких до номінального. К. к. д. зменшується із зменшенням активної складової струму навантаження.
Розділ VII СИНХРОННІ ДВИГУНИ
1. ПРИНЦИП ДІЇ СИНХРОННОГО ДВИГУНА
За будовою синхронний двигун майже не відрізняється від синхронного генератора (параграф 6—1). Якщо статор синхронного двигуна практично такий самий, як статор синхронного генератора, то конструкція ротора двигуна залежить від швидкості його обертання. У тихохідних двигунах ярмо має вигляд колеса, до якого болтами прикріплено полюси. У швидкохідних ярмо складають із стальних листів, які стягують шпильками. До такого ярма у Т-подібних пазах кріплять полюси, які складають з окремих листів електротехнічної сталі завтовшки 1 ~ 1,5 мм. На ці полюси намотують обмотку збудження, що живиться постійним струмом від збудника, якір якого кріплять на одному валі з двигуном. Зовнішній вигляд синхронного двигуна зображено на рис. 7—1. Якщо до обмотки статора синхронного двигуна (рис. 7—2) підвести трифазний змінний струм, а до обмотки збудження постійний струм, то внаслідок взаємодії постійного магнітного потоку ротора Ф і змінного струму в статорній обмотці І, виникає механічний момент
M = кФ І. (7—1)
Оскільки магнітний потік у двигуні сталий, а струм змінний, то обертаючий момент змінюватиме напрям дії через кожний півперіод (100 поштовхів за секунду при / = 50 гц), а в результаті ротор двигуна вібруватиме і залишиться нерухомим. Отже, синхронний двигун не має свого пускового моменту.
Щоб такий синхронний двигун міг працювати, його ротор треба розкрутити іншим двигуном до синхронних обертів, які відповідають частоті струму мережі. Одночасно із зміною напряму струму в обмотці статора змінюється знак полюса ротора, тобто напрям магнітного потоку ротора. Наприклад (див. рис. 7—2), якщо в якийсь момент часу проти провідника із струмом, що напрямлений від спостерігача, буде північний
полюс N ротора, то через півперіод в цьому провіднику струм буде напрямлений на спостерігача, а ротор повернеться на кут 90°. Навпроти цього провідника стане південний полюс S; при цьому напрям дії обертаючого моменту залишиться тим самим і ротор продовжуватиме свій рух. З цього часу ротор обертатиметься з синхронною швидкістю разом з обертовим магнітним полем статора, відстаючи від поля на невеликий кут Θ. Тепер розгінний двигун можна від’єднати.
Рис.
7—1.
Трифазний
синхронний двигун: Рис. 7—2.
Конструк-
/
— вал; 2—
корпус; З—
збудник. ТИВНЭ
схема
синхрон-
ного
двигуна.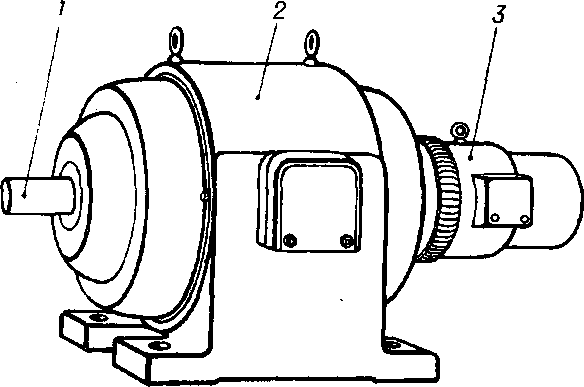
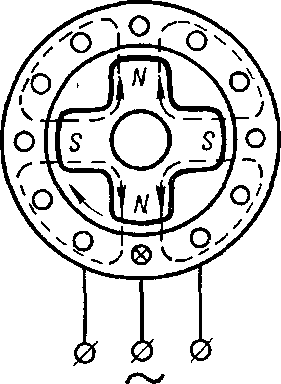 Отже,
коли синхронна машина працює як генератор
(див. рис. 6—23),
ведучою
ланкою є ротор, вісь магнітного потоку
якого випереджає вісь потоку статора
на кут Θ.
В
цьому випадку синхронна машина
перетворює механічну енергію в електричну.
Коли синхронна машина працює як двигун,
ведучою ланкою стає потік статора, а
веденою — потік ротора, який відстає
на кут Θ
і
обертається з тією самою швидкістю,
що й поле статора; при цьому електрична
енергія перетворюється в механічну.
Отже,
коли синхронна машина працює як генератор
(див. рис. 6—23),
ведучою
ланкою є ротор, вісь магнітного потоку
якого випереджає вісь потоку статора
на кут Θ.
В
цьому випадку синхронна машина
перетворює механічну енергію в електричну.
Коли синхронна машина працює як двигун,
ведучою ланкою стає потік статора, а
веденою — потік ротора, який відстає
на кут Θ
і
обертається з тією самою швидкістю,
що й поле статора; при цьому електрична
енергія перетворюється в механічну.
2. СПОСОБИ ПУСКУ СИНХРОННИХ ДВИГУНІВ
Пустити синхронний двигун безпосереднім вмиканням у мережу неможливо. Існує два способи пуску синхронних двигунів: синхронний і асинхронний.
Синхронний пуск полягає в тому, що спеціальний розгінний пусковий двигун (це може бути асинхронний двигун або двигун постійного струму потужністю до 10% від потужності синхронного двигуна), який з’єднують із синхронним двигуном роз- німною муфтою, розкручує ротор ненавантаженого синхронного двигуна до синхронних обертів. Після розгону ротора виконують усі операції синхронізації, які описані в параграфі 6—4. Коли двигун втягується в синхронізм,розгінний двигун вимикають.Синхронна
машина переходить у режим двигуна, і його вал можна навантажувати. Недоліком цього способу пуску є його складність і висока вартість за рахунок розгінного двигуна і пристроїв синхронізації. Тому тепер в основному для пуску синхронних двигунів застосовують асинхронний.
Рис.
7—3.
Пускова
обмотка синхронного двигуна; /
— полюсний башмак;
2
— стержні
(пускова обмотка); з
—
з'єднувальна пластинка;
4
—
обмотка збудження.
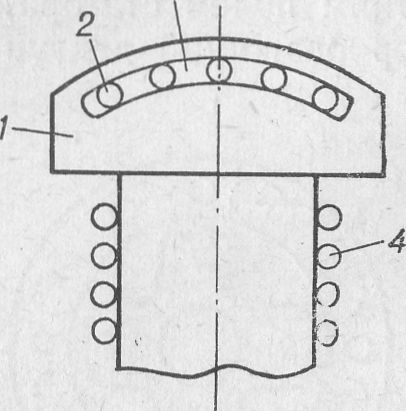
о—0
0—0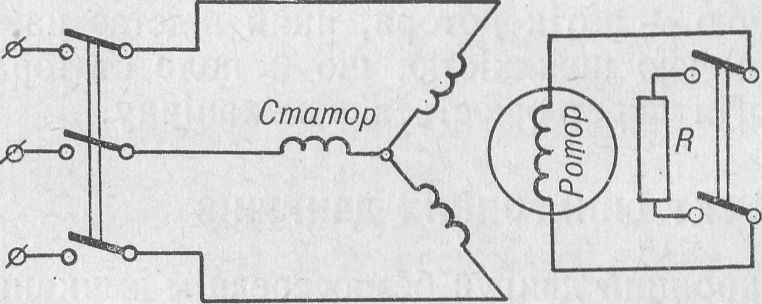
Рис. 7—4. Електрична схема синхронного двигуна.
Тому
в коло обмотки збудження ротора під час
пуску вмикають активний опір R,
що
знижує напругу на затискачах обмотки
до безпечної. Крім того, роторна обмотка,
увімкнена на активний опір, працює як
додаткова асинхронна обмотка і створює
додатковий пусковий момент, що полегшує
пуск двигуна.
При різких змінах навантаження на короткий час оберти ротора змінюються, що може вивести двигун із синхронізму. Додаткова
обмотка при цьому створює момент, який удержує ротор у синхронному режимі, тому ця обмотка називається ще заспокоюючою, або демпферною.
Безпосереднє вмикання в мережу синхронного двигуна (прямий пуск) застосовують для двигунів, потужність яких порівняно невелика — до сотень кіловат.
Для асинхронного пуску синхронних двигунів великої потужності застосовують знижену напругу, використовуючи автотрансформатори або реактори.
3. Векторна діаграма синхронного двигуна.
ОБЕРТАЛЬНИЙ МОМЕНТ І ПОТУЖНІСТЬ ДВИГУНА ПРИ п = const
Рис.
7—5.
Векторна
діаграма синхронного двигуна.
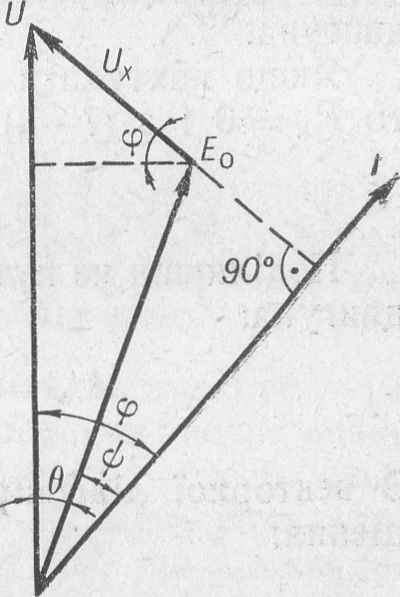
Для синхронного двигуна рівняння електричної рівноваги має вигляд:
O = E0+ Tx = E0+ Ux. (7-2)
На векторній діаграмі двигуна кут зсуву між напругою і е. р. с. позначено через Θ, між е. р. с. і струмом — через ψ, а між напругою і струмом — через φ.
Якщо
P1
—
електрична потужність, яку споживає
двигун з мережі, то частина цієї потужності
йде на покриття втрат у міді обмотки
статора P1,
а
решта перетворюється в електромагнітну
потужність Рем,
яка
передається з статора на ротор.
Отже,
(7-3)
Po
—
Pмех
"Ь Pcm·
Отже,
P
2
=
Рем Po-P ем
—
P
мех
—
P
C
т>
або
(7-4) (7-5) (7-6)
З (7—3) і (7—6) маємо:
P1
=
P2
+ P0
+
Рм. (7-7)
З рівняння потужностей (7—7) видно, що потужність, підведена до двигуна Pu дорівнює сумі корисної потужності на валі двигуна P2, яка йде для виконання корисної роботи, і потужностей втрат у міді Pm та холостого ходу P0. Якщо рівняння
(7—6)
поділити
на кутову швидкість обертання ротора
ω
= 2π~, то
матимемо рівняння моментів: — =
—
+
^ ,
звідки
1 О) О) CO
Мем =M2 + M0. (7—8)
Отже,
електромагнітний момент двигуна Мем
складається з суми .двох моментів: M2
—
корисного моменту, який зрівноважується
корисним гальмівним моментом, і Ai0
—
моменту холостого ходу, який зрівноважується
гальмівним моментом при холостому ході
двигуна.
Якщо
нехтувати активним опором обмотки
статора двигуна, то Pm
=
0 і
з (7—3)
матимемо:
Рем
=
Pi =
ЗUI
cos φ. (7—9)
Поділивши на кутову швидкість, знайдемо обертальний момент двигуна:
M
м
=—
= ?UI
cos
?
=
ψ-,υΐ
cos
φ. (7—10)
ω ω 2 nf ‘ ν
З векторної діаграми (рис. 7—5) можна написати таке співвідношення:
U
cos φ
==
E0
cos ψ;
тоді
Мем
= ЗР
^fC0S (7-11)
Підставивши
в (7
— 11) значення
E0
= 4,44Фfwk0e
і
об’єднавши сталі величини в один
коефіцієнт k,
дістанемо:
Мем
=
кФІ
cos
ψ, (7—12)
тобто
обертальний момент двигуна пропорційний
магнітному потоку і
струму статора.
Щоб з’ясувати характер зміни обертального моменту двигуна, зробимо такі перетворення:
З
векторної діаграми двигуна (рис. 7—5)
Ux
cos φ
=
E0
sin θ;
тому
що Ux
= IX, то
М.* = ¾ ^ sin O = Mmax sin 6. (7~14)
Отже, обертальний момент синхронного двигуна за величиною подібний до моменту синхронного генератора (див. 6—15).
У генераторі цей момент є гальмівним, у двигуні він напрямлений у протилежний бік і є корисним обертальним моментом..
Рис.
7—6.
Кутові
характеристики синхронної машини.
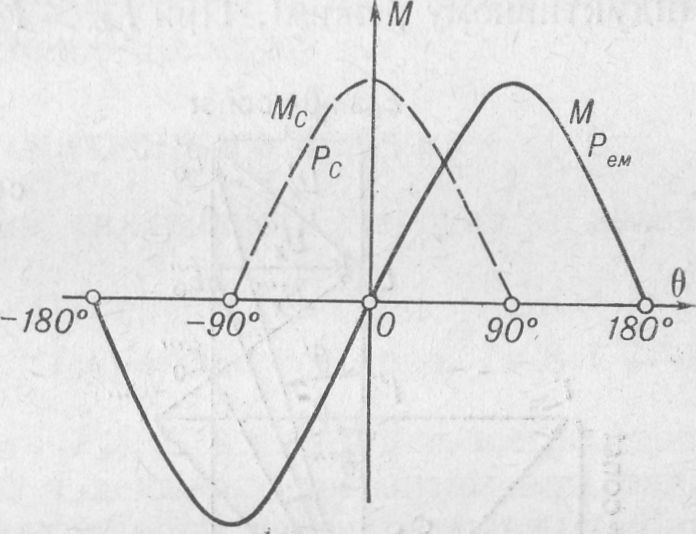
(6—16) і (7—14), для—180°<
< Θ < 180°.
Область
додатних кутів Θ
відповідає
роботі машини генератором, а область
від’ємних кутів 0
—
роботі двигуном. З рисунка видно, що
робота двигуна можлива тільки тоді,
коли гальмівний момент менший, ніж
Mniax.
У
противному разі рівновага між моментами
порушиться, бо синхронізуючий момент
при б =
90° дорівнює
нулю Mc
=
0,
і двигун
вийде з синхронізму. Швидкість обертання
почне різко спадати, виникнуть недопустимі
коливання струму і обертального моменту.
У цьому випадку двигун треба негайно
вимкнути. Практично робота двигуна
можлива при Θ
<
30°,
що
відповідає номінальному моменту Mh
<
0,5
Mmax.
4. Робота синхронного двигуна при сталій потужності і різних струмах збудження
При
сталій корисній потужності на валі
синхронного двигуна практично
залишатиметься сталою і потужність,
яку споживає двигун з мережі: ЗUI
cos φ.
Напруга
сітки U
також
є величиною сталою. Отже, вважаємо, що
P
= const, U
= const, f
=
const
і he
—
var.
Оскільки
при зміні струму
збудження
активна
потужність
і напруга залишаються сталими P
= ЗUl
cos φ
=
const, то
буде сталою і активна складова струму
/
cos φ
=
const. Крім
того, з (7—14)
величина
Zi10
sin Θ
=
const. Векторна
діаграма синхронного двигуна для трьох
різних струмів збудження зображена на
рис. 7—7,
а.
Зауважимо,
що при зміні струму збудження змінюється
магнітний потік і е. р.с.£0.
Оскільки трикутник напруг U,
E0
і
Ux
зали
шається
замкненим і, крім того, вектор Ux
повинен
бути перпендикулярним до вектора
струму І,
то із зміною струму збудження змінюється
величина і положення вектора струму /.
Таким чином, при сталій активній складовій / cos φ = const змінюватиметься реактивна складова струму / sin φ, а отже, і реактивна потужність двигуна.
При
певному значенні струму збудження /Зб.
окут<р
= 0, cos
ср
=
1 і
значення струму І
=
/"
стає найменшим при певному навантаженні.
При I36
<
Із6.
0
(недозбудження) І
=
І"'
> /" струм відстає за фазою від напруги
на кут ψ"';
двигун
працює в активно- індуктивному режимі.
При I36
>
I36.
о
(перезбудження) / =
/'
> Г
£osin0
= const
Рис.
7—7. Векторні
діаграми і U-подібні криві
синхронного двигуна при регулюванні
струму збудження.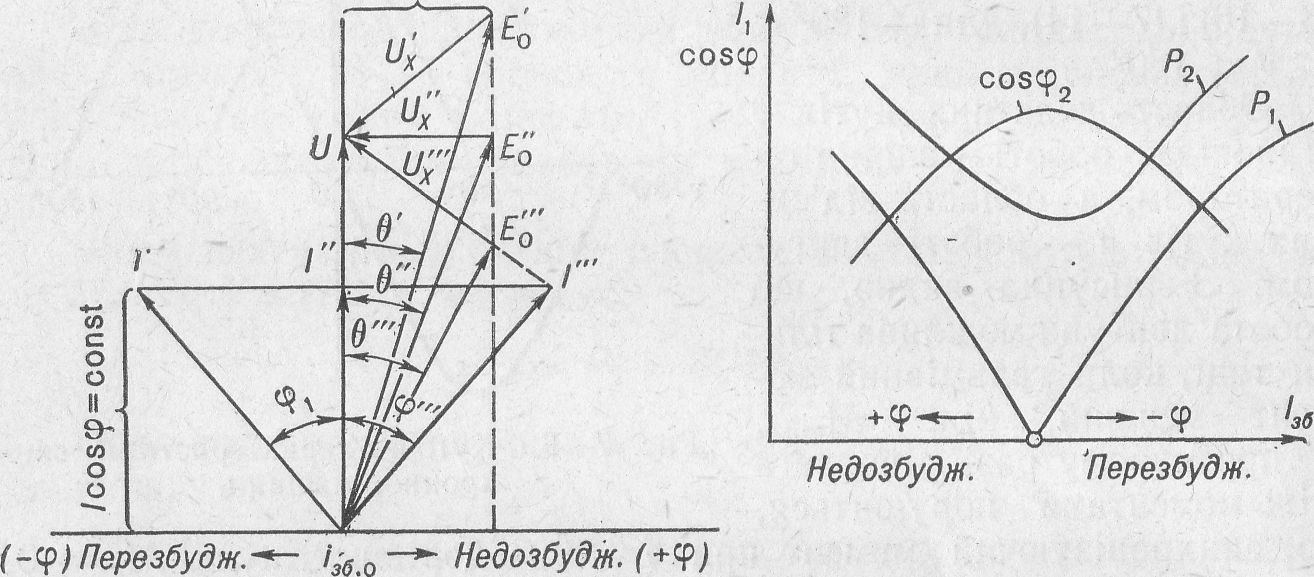
струм
випереджає за фазою напругу на кут φ"
і
двигун працює в активно-ємнісному
режимі. Характер зміни-струму статора
від струму збудження в роторі показано
на рис. 7—7,
б.
Це так звані {/-подібні криві синхронного
двигуна.
З
погляду виконання двигуном механічної
роботи цілком байдуже, який у машини
буде режим збудження, оскільки· двигун
в обох режимах забезпечує потрібний
механічний момент. Але з електроенергетичної
точки зору режим збудження є дуже
важливим, бо він визначає величину і
фазовий зсув струму І.
Найвигідніший є такий струм збудження,
коли потрібну механічну потужність
дістаємо при найменшому робочому струмі
/(φ
=
0, див.
рис. 7—7,
б).
Синхронні двигуни вмикають у мережу,
від якої живляться й інші споживачі.
Основну частину навантаження звичайно
дають асинхронні двигуни, які
споживають відстаючий струм
(активно-індуктивний режим). Це знижує
коефіцієнт потужності мережі і, отже,
негативно
впливає
на
роботу всього
енергообладнання.
Тому най- раціональнішим
режимом
роботи синхронного двигуна
є активно- ємнісний режим
з
випереджаючим струмом, який створюється
при перезбудженні двигуна (див. рис.
7—7,
а).
При цьому реактивна складова струму
синхронного двигуна частково компенсує
реактивну складову струму асинхронних
двигунів і цим самим загальний струм,
що надходить до споживачів, зменшується,
а коефіцієнт потужності енергосистеми
в цілому збільшується.
Здатність синхронних двигунів працювати в режимі перезбу- дження при випереджаючому струмі є цінною його властивістю, яка використовується для підвищення коефіцієнта потужності окремих споживачів і енергетичних систем у цілому.
5. Робочі характеристики синхронного двигуна
Робочими характеристиками синхронного двигуна є залежності:
η,
Μ,
η, cos
φ
=
/ (P2)
при
Uc
= const;
f
= const і
13б
=
const (рис.
7—8
і
7—9)
Число обертів двигуна л = /(Р2) в межах від холостого ходу до номінального навантаження і деякого перевантаження залишається сталим і дорівнює синхронному числу обертів. Сталість числа обертів зберігається до кінця перевантажувальної здатності двигуна, яка дорівнює:
fc* (7-15)
H
Ураховуючи (7—14), дістанемо:
![]()
Q.25
0,5 0,75 1.0 1,25
Рис.
7—8.
Робочі
характеристики синхронного двигуна.
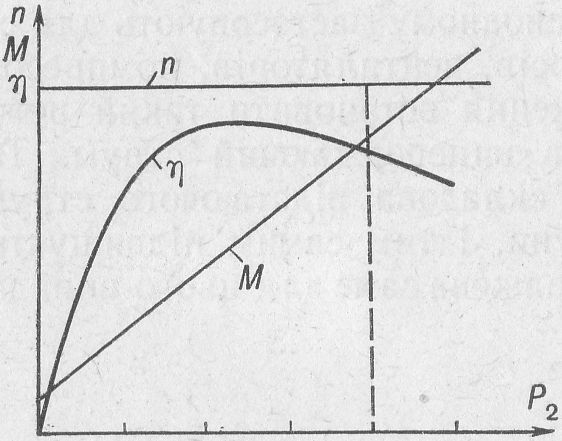
=
cos (+φ.) coscp
О
0,2 0,4 0,6 0,8 1,0 1.2
І
0,8 1,0
І
°·8
cos(-cp)
Рис. 7—9. Криві cos φ = /(Рг) при різних струмах збудження синхронного двигуна.
При 6 = 90° синхронізуючий момент дорівнює нулю (див. рис. 7—6), двигун починає працювати нестійко і виходить із синхронізму, а кількість його обертів зменшується до нуля. Оскільки синхронні двигуни працюють із сталою швидкістю обертання при сталій частоті, то їх застосовують у пристроях синхронного зв’язку різних паралельних процесів, а мікродвигуни — у звуковому кіно, самопишучнх приладах і т. д.
Обертальний
момент змінюється пропорційно
навантаженню. При холостому ході (P2
= 0) момент
пропорційний потужності втрат, тому
крива M
= /(P2)
починається
не з нуля. Пропорційна залежність M
=
/(P2)
зберігається
до кінця перевантажувальної здатності
двигуна. Коефіцієнт корисної дії
синхронного двигуна визначається за
формулою:
η
= р\т-
■ (7-17)
Ρ*+Σρ
Так
само, як і в генераторі, сума втрат в
двигуні ΣΡ
складається
з втрат у міді статора і ротора, у сталі
статора і механічних втрат. Для сучасних
синхронних двигунів η
=
0,9 -ь
0,97,
причому
більші значення стосуються двигунів
більшої потужності. Крива η
=
/(P2)
досягає
свого максимуму при навантаженнях 0,6
—
0,7
від
Р2„,
а потім повільно спадає за рахунок
збільшення втрат. Коефіцієнт потужності
синхронного двигуна у функції від
навантаження зображено на рис. 7—9.
Якщо
струмом збудження встановити cos
φ
=
I при
номінальному навантаженні двигуна
(крива / на рис. 7—9),
а
потім навантаження зменшувати, то cos
φ
спадатиме
в бік від’ємних кутів зсуву фаз між
струмом і напругою (— φ).
Це
означає, що при I3б
=
const зменшенню
навантаження відповідає перехід двигуна
на режим роботи з перезбудженням і,
отже, двигун починає споживати
випереджаючий струм. При збільшенні
навантаження понад номінальне струм
відставатиме від напруги, cos
φ
зменшуватиметься
в бік додатних кутів (+
φ),
двигун
переходить у режим недозбудження,
споживаючи відстаючий струм.
Оскільки
синхронні двигуни в основному застосовують
для сталих навантажень (для приводів
насосів, вентиляторів, компресорів та
ін.), то доцільно струмом збудження
встановити такий режим роботи двигуна,
щоб він споживав випереджаючий струм.
Тоді частково компенсується реактивна
складова відстаючого струму, який
споживають асинхронні двигуни, і тим
самим підвищується cos
φ
мережі.
Крива 2
(рис.
7—9)
зображена
саме для цього випадку.
§ 7—6. СИНХРОННИЙ КОМПЕНСАТОР
Синхронний компенсатор — це синхронний двигун, призначений для роботи без механічного навантаження в режимі перезбу- дження, і для збільшення коефіцієнта потужності в мережі. На рис. 7—10 зображена векторна діаграма компенсації індуктивного
зсуву
фаз синхронним компенсатором. З рисунка
видно, що без компенсатора струм
мережі I1
відстає
за фазою від напруги мережі на кут (P1.
При
вмиканні синхронного компенсатора,
який у режимі перезбудження споживає
випереджаючий струм, кут зсуву фаз φ
між
результуючим струмом Ipe3
і
напругою зменшується, а отже, збільшується
cos
φ
мережі.
Рис.
7—10.
Векторна
діаграма компенсації індуктивного
зсуву фаз синхронним компенсатором.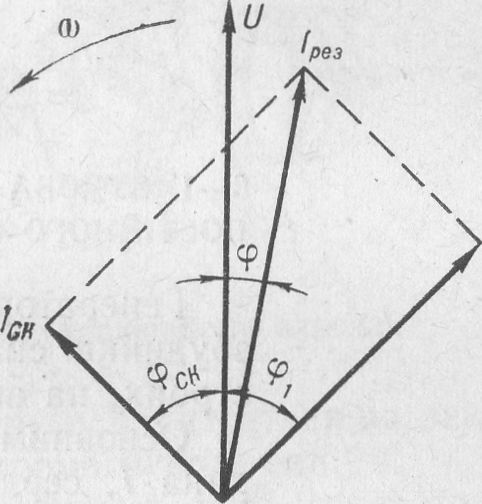
Оскільки синхронні компенсатори не несуть навантаження, їх вали виготовляють легшими, ніж у двигунах. Це зменшує механічні втрати. Крім того, вони мають обмотку збудження з більшим поперечним перерізом, щоб забезпечити тривалу роботу в режимі перезбудження.
Для зменшення втрат у синхронних компенсаторах зменшують повітряний
зазор
між статором і ротором, а для охолодження
компенсаторів потужністю 50
тис.
ква
і більше застосовують не повітряне,
а водневе охолодження, що зменшує втрати
на ЗО—40%.
У
цілому втрати в синхронних компенсаторах
не перевищують 2—3%
від
їх номінальної потужності. Радянські
заводи випускають синхронні компенсатори
потужністю від 1000
до
75
000 ква
на різні
напруги
і різне число обертів.
ЕЛЕКТРИЧНІ ГЕНЕРАТОРИ ПОСТІЙНОГО СТРУМУ
8—1. БУДОВА TA ПРИНЦИП ДІЇ ГЕНЕРАТОРА ПОСТІЙНОГО СТРУМУ
Генератори постійного струму застосовують як збудники синхронних генераторів, у зарядних пристроях, на автомобілях тощо.
Основними
частинами генератора (рис. 8—1)
є
станина /, сердечники полюсів 8,
обмотка
полюсів (обмотка збудження) 7,
якір
5
(сердечник
з обмоткою), колектор 2,
підшипникові
щити З
і 9
(передній
і задній) і траверса 4
з
щіткотримачами та щітками. На валу якоря
закріплено вентилятор 6.
Станина
/— це литий або зварений циліндр,
виготовлений з чавуну або сталі з високою
магнітною провідністю. Вона є
магнітопроводом, а також основою для
кріплення головних і додаткових полюсів,
підшипникових щитів, вивідних затискачів
на клемному щитку.
Підшипникові
щити 3
і
9
прикріплюють
болтами до торців станини. На підшипниках,
вставлених в отвори щитів, обертається
вал якоря. Якір 5
складається
з сердечника, обмотки, колектора і вала.
Сердечник якоря — це стальний циліндр,
складений з окремих штампованих
листів електротехнічної сталі,
ізольованих один від одного для
зменшення вихрових струмів. На поверхні
сердечника є пази, в які укладають
обмотку якоря.
Колектор
(рис. 8—2)
складається
з окремих пластинок 4
клиновидної
форми, виготовлених з міді. Вони ізольовані
одна від одної слюдою. До кожної
колекторної пластини прикріплюють
відводи від обмотки якоря. Сердечник
якоря з обмоткою і колектором закріплюють
на валі якоря, ізолюючи їх від вала.
Щіткотримач
із щіткою зображено на рис. 8—3.
Щітка
3
—
це вугляно-графітова, графітова, мідно-
графітова прямокутна призма. Кожна
щітка має свої технічні характеристики:
твердість, допустиму густину струму
та ін. Іх добирають, виходячи з потужності
генератора,
швидкості
обертання якоря та ін. Щітка притискається
до колектора пружиною 2.
Щіткотримач
4
через
хомутик з’єднується з пальцем щіткової
траверси, яка кріпиться на одному з
підшипникових щитків. Щіткотримач
із щітками призначений для знімання
струму з колектора генератора і подавання
його до споживача.
Рис.
8—1. Генератор постійного
струму в розібраному вигляді.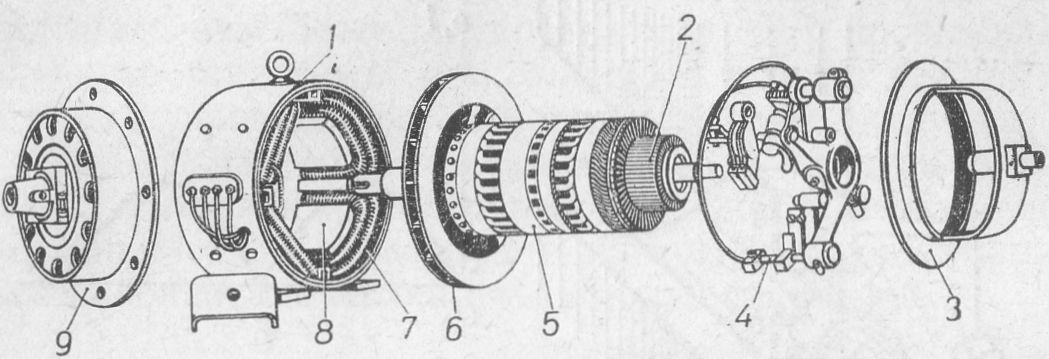
Принцип дії генератора постійного струму грунтується на законі електромагнітної індукції і законі електромагнітних сил.
У провіднику, що рухається в магнітному полі генератора, постійний струм виникнути не може. Постійна е. р. с. і струм можуть бути створені тільки випрямленням змінної е. р. с., що виникає в обмотці генератора змінного струму. До пластин колектора
1
—
провід; 2
—
пружина; З
— щітка; 4
—
щіткотримач.
1
—
гайка; 2
—
натискний конус; З
— мі- канітовий конус; 4
—
колекторні пластини; 5
—
бандаж; 6
—
втулка.
Рис.
8—3.
Щіткотримач
із щіткою:
Рис.
8—2.
Колектор:


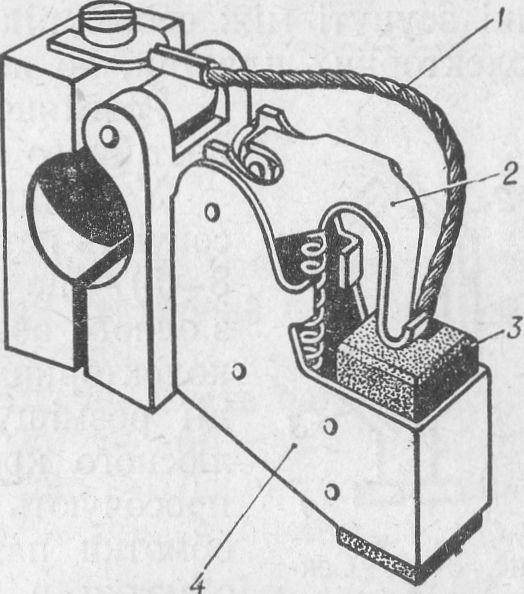
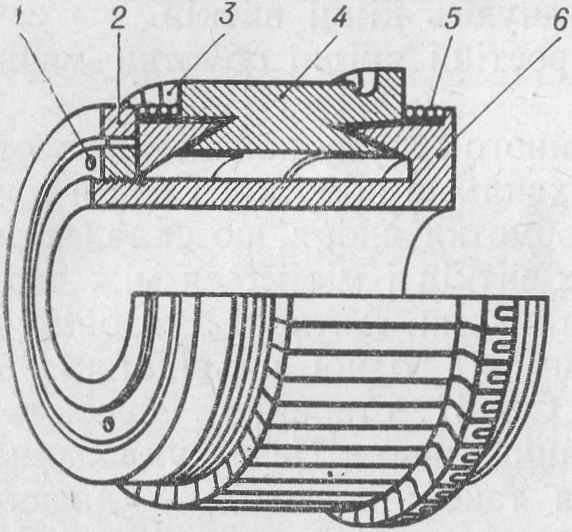
(рис.
8—4)
приєднують
кінці витка abed.
Щітки
на колекторі встановлені нерухомо
так, щоб вони при обертанні витка з
півкільцями переходили з одного
півкільця на друге, коли індукована е.
р. с. у витку дорівнює нулю. Як видно з
рис. 8—4,
а,
щітка А
завжди в контакті з тим півкільцем,
провід від якого проходить під північним
полюсом, а щітка В
— з тим, провід від якого проходить під
південним
полюсом. Тому в зовнішньому колі струм
проходить в одному напрямі — від щітки
А
до щітки В.
Графік випрямленого струму зображено
на рис. 8—4,
б.
Як видно з рисунка, випрямлений струм
є пульсуючим, тобто значення е. р. с. і
струму збільшуються
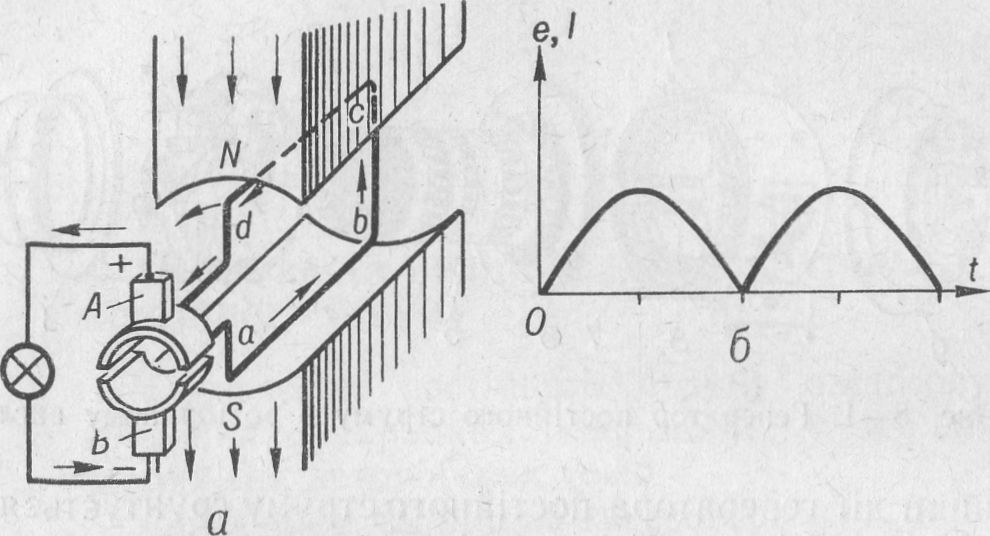
Рис. 8—4. Схема роботи машини постійного струму:
а — схема генератора; б — випрямлений пульсуючий струм.
від нуля до максимуму і знову спадають до нуля. Для зменшення пульсації е. р. с. і струму на роторі збільшують кількість витків (які зсунуті між собою під певним кутом) і відповідно кількість колекторних пластин, до яких приєднують кінці витків.
Рис.
8—5.
Секція
обмотки якоря:
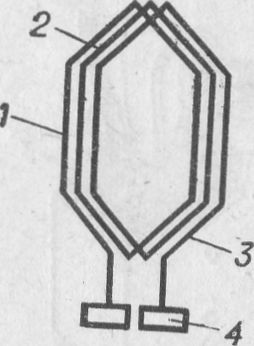
1
—
активні провідники, що лежать у
лазах; 2
—
задня лобова частина; 3
—
передня лобова частина; 4—колекторні
пластини.
Обмотка повинна відповідати таким вимогам: бути замкненою і розподіленою щітками на парне число ділянок однакової довжини; е. р. с., які індукуються в усіх провідниках однієї ділянки, повинні додаватися; е. р. с. сусідніх ділянок повинні бути однакові і напрямлені одна проти одної так,
щоб сумарна е. р. с. дорівнювала нулю і щоб не утворювалися зрівняльні струми.
Розглянемо
петльову (паралельну) обмотку (рис. 8—7).
Для
наочності розглянемо тільки дві секції.
Як бачимо, активні провідники 1
і
2
перебувають
під північним полюсом, а провідники З
і '4
—
під південним. Тому індукована е. р. с.
у провідниках 1
і
2
напрямлена
протилежно е. р. с. у провідниках З
і 4.
Щоб
е. р. с. усіх чотирьох провідників
додавалися, треба сполучити кінець
першої секції з початком другої, кінець
другої — з початком наступної і т.
д., рухаючись
петлеподібно. Звідси і назва — петльова
обмотка. Кінці секцій приєднують до
сусідніх колекторних пластин. Для
виконання обмотки треба знати такі
дані:
Рис.
8—6. Укладання
обмотки в пази якоря. Рис. 8—7.
Петльова
обмотка.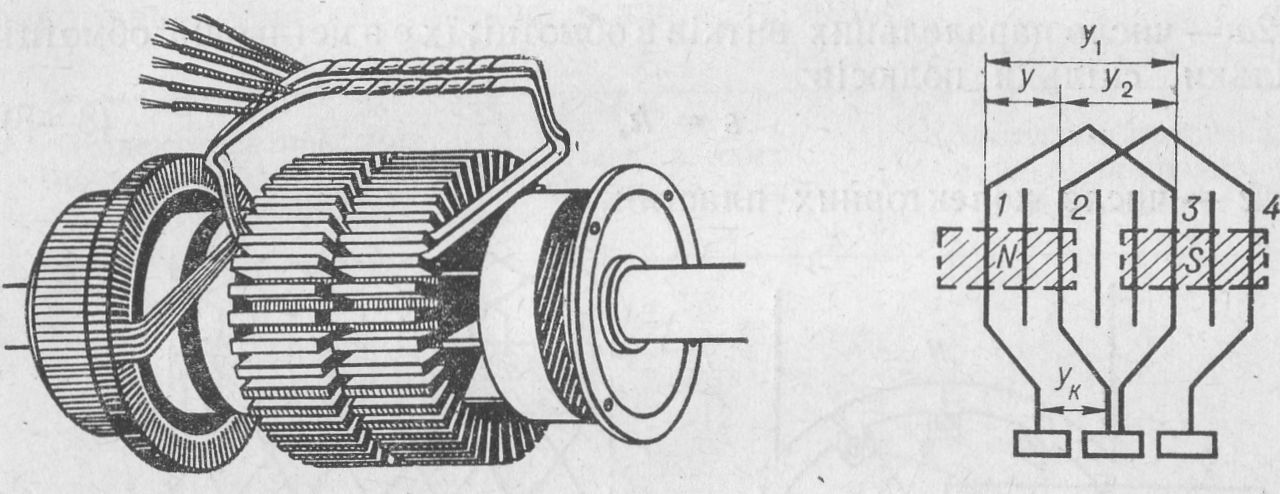
Ijl
—
перший частковий крок, відстань між
початком і кінцем секції, тобто ширина
секції; у2
— другий частковий крок, відстань між
кінцем однієї секції і початком наступної;
у
— результуючий крок, відстань між
початками
двох
секцій, що йдуть одна за одною (усі кроки
якірної обмотки вимірюються числом
пазів барабана); ук
— крок обмотки по колектору, відстань
між початком і кінцем секції по колектору,
що вимірюється числом пропущених
ізоляційних прошарків.
Розрахункові формули для простої петльової (паралельної) обмотки такі:
у — Уі — уг; (8-і)
Ук= 1. (8-2)
(8-3)
У = 2 ук
(8-4)
Уі
де
ζ
—
число активних сторін обмотки: 2р —число
полюсів; τ
— полюсний
крок; є — найменше число, яке додається
або віднімає-
ться
від ^
,
щоб D1
було
цілим числом. На практиці застосовують
ЕЛЕКТРОТЕХНІКА 1
I = eW- "-П> 9
/~ТГ~ 50
' “ Vl\ + 1\ + I\ + I\+ ■■ +Il (1-93) 50
сп\ 59
и, 64
—07 110
,· _а,-J.,-, (4-,2) 122
K = ~i[~t + nxi· 152
71 = (р2 + SPim)100 % ’ 173
0= 174
'XfX'' ~хГхГ 233
B. + ^, (9_14) 253
Tft 351
де
k
—
число колекторних пластин.
WM
і
„а J
к I. 1—Іьі-
J
І
4
І
й
б
2
9
12
7
10
5
—і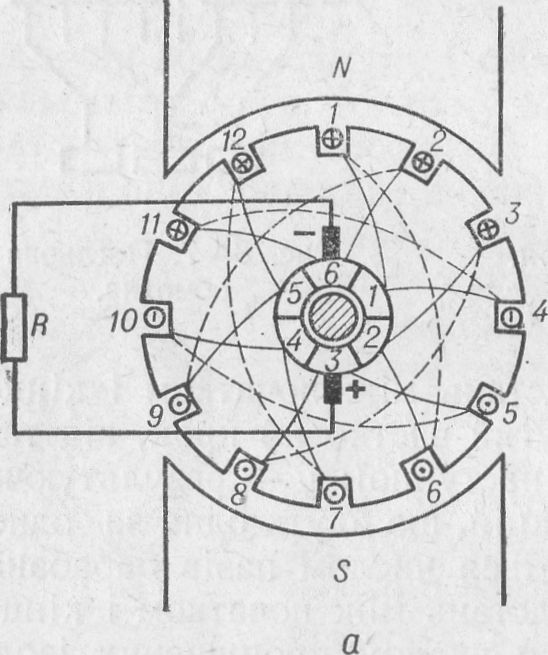
Рис. 8—8. Схема простої петльової обмотки, в якої уі = 5; уг = 3; у = 2; yk= 1;
г = 12; 2р — 2:
а — радіальна; б — розгорнута; в — спрощена схема обмотки з позначенням е. р. с.
Для
прикладу накреслимо просту одношарову
петльову обмотку за такими даними: 2
р
=
2, s = 6.
За
(8—3)
знаходимо:
ц
=
sIvh
=
2; за
(8—6)-
Z
= 2s = 2 ■
6=
12;
за
(8
—8) —
k
= s
= 6;
z 12
за
(8—4)
—
i/1==^
— S = -J-1
= 5
(укорочення
на один паз); за (8—1)
—
Ij2
= Ij1-
у
= Ь —
2
= 3.
Починаємо виконувати обмотку з першої колекторної пластини (рис. 8—8,а), потім укладаємо її в перший паз.
Щоб
визначити номер паза, в який треба
укладати кінець секції, треба до номера
паза, в якому лежить початок секції,
додати уи
отже,
1+5
= 6. Кінець
секції укладаємо в шостий паз і
закінчуємо її на другій колекторній
пЛастині, оскільки уи
—
1,
тобто
між початком і кінцем секції по колектору
лежить один ізоляційний прошарок.
Другу
секцію починаємо з другої колекторної
пластини. Щоб визначити номер паза, в
який треба укласти початок другої
секції, до номера паза, в якому лежить
початок першої секції, додаємо у.
Отже,
1
+ у
=
1 + 2 = 3. Початок
другої секції укладаємо в третій паз.
Потім укладаємо обмотку аналогічно.
Щоб полегшити виконання обмотки, бажано
скласти таблицю.
Таблиця 8—1
Колекторна пластина, до якої припаяно початок секції |
Пази, в яких міститься секція |
Колекторна пластина, до якої припаяно кінець секції |
1 |
1—6 |
2 |
2 |
3—8 |
3 |
3 |
5—10 |
4 |
4 |
7—12 |
5 |
5 |
9—2 |
6 |
6 |
11—4 |
1 |
Рис.
8—9.
Двошарова
проста петльова обмотка, в якої г
=
6;
s
=
6; 2р
=
2;
уі
=
3;
уг
=
2;
Уи
=
У
=
І-
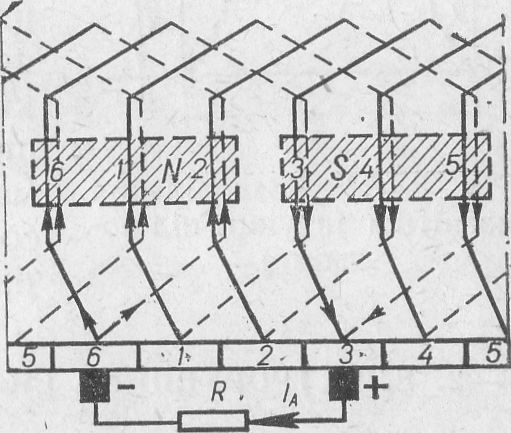
(11,
4, 1, 6, З,
8),
у
другій вітці— протилежний напрям (2,
9,12,
7,10,
5).
Отже, в обох паралельних вітках е. р. с. однакові і протилежно напрямлені, тому струму в обмотці якоря при відсутності зовнішнього кола не буде. При наявності зовнішнього кола по кожній паралельній вітці обмотки якоря проходитиме половина струму зовнішнього кола (рис.
8—8,
в).
На практиці найчастіше застосовують
двошарові обмотки, тобто в.кожний паз
вкладають дві сторони двох різних
секцій. Якщо розглянуту обмотку
намотаємо в два шари, то при S
= 6 (шість
секцій) нам потрібно буде лише 6
пазів.
Оскільки число пазів у два рази
зменшується, то й результуючий крок по
пазу у
також у два рази зменшиться і дорівнюватиме
1.
Двошарова
обмотка з z
= 6, s
= 6, 2р
=
2, yk
= t/ = k
зображена
на рис. 8—9.
Штриховими
лініями показано нижні шари обмотки.
Хвильова
(послідовна) обмотка. Обмотка називається
хвильовою тому, що форма секції нагадує
хвилю. На рис. 8—10,
а
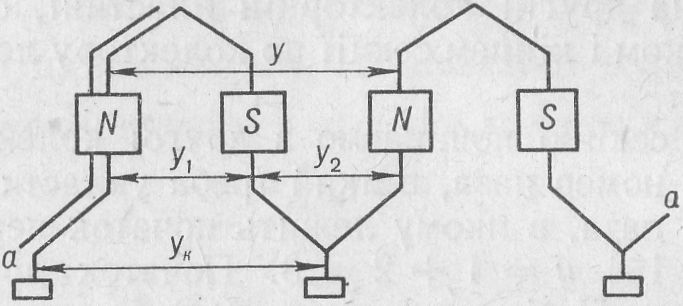
Рис. 8—10. Елементи хвильової обмотки:
а — секція; б — частина обмотки з позначенням кроків
зображено
секцію, а на рис. 8—10,
б
— хвильову обмотку з її елементами.
Якщо в петльовій обмотці спочатку
послідовно заповнюють фази однієї
окремої пари полюсів, а потім переходять
до другої, то хвильову обмотку виконують
відразу по всіх полюсах, тобто по
Рис.
8—11.
Розподілення
магнітної індукції під по-
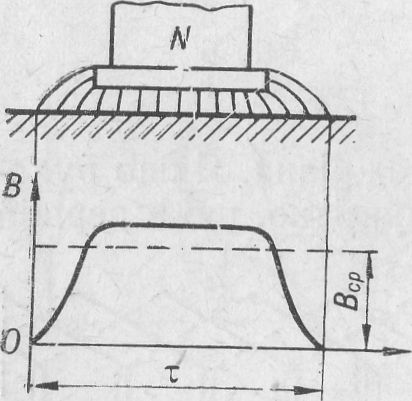
а
—а
повертаються
до першого полюса з деяким зсувом
відносно першого положення і знову
обходять по всьому колу і т. д. Якщо в
петльовій обмотці кількість паралельних
віток не може бути меншою за кількість
пар полюсів, то при простій хвильовій
обмотці паралельних віток може бути
навіть дві, незалежно від числа пар
полюсів; кількість послідовно
сполучених витків збільшено для
збільшення е. р. с. Таку обмотку
називають послідовною і застосовують
для генераторів з великою напругою.
8—2. ЕЛЕКТРОРУШІЙНА СИЛА І ЕЛЕКТРОМАГНІТНИЙ МОМЕНТ
Для
визначення е. р. с. генератора слід
урахувати те, що магнітна індукція
В
в повітряному зазорі по колу неоднакова
(рис.
11). Магнітний потік у повітряному зазорі
Ф = ^BdS = j Bldx,
х=0
де
S
—
поверхня якоря в межах полюсного поділу,
м2;
— довжина активної частини провідників. Середнє значення індукції в зазорі Btp:
(8—10)
Tj , M2
х=0
З (8—9) і (8—10) маємо:
Ф = BcpIx [вб]. (8-11)
Середнє значення е. р. с. в одному провіднику обмотки якоря»
. . „ . M
якии
рухається з лінійною швидкістю V
— ,
дорівнює:
Ecp = BcpIv -5- · V. (8—12)
Якщо
загальну кількість провідників якоря
візьмемо N,
то
.
. . - N
в одній паралельній вітці послідовно буде сполучено ^ провідників. Тому е. р. с. генератора буде:
Ε = ίαΕ" = ίά· Τ Φ· (8-13>
Подамо
лінійну швидкість провідника υ
і
полюсний поділ τ
через
діаметр якоря:
= ¾?. (8-14)
τ=·=?. (8-15)
р '
З (8 — 13), урахувавши (8—14 і 8—15), матимемо:
E = ~ ■ -ξ-0 пФ = сепФ, (8-16)
Де °е = ш = const- (8—17)
Отже, е. р. с.. генератора пропорційна числу обертів якоря за хвилину і магнітному потоку Ф.
У
кожній машині постійного струму
спостерігається взаємодія між струмом
якоря і магнітним полем, створеним
струмом збудження. Внаслідок на
кожний провід якоря діятиме електромагнітна
сила F
= BcpIL
При
числі проводів якоря N
результуюча
сила, що діє по дотичній до кола якоря
F = BcpIIN. (8-18)
Підставивши
сюди середнє значення індукції з (8—11)
і
значення струму в кожному з проводів
якоря Ι=γα,
матимемо:
![]()
р
Електромагнітний момент
![]()
(8-20)
![]()
Таким чином, електромагнітний момент, який для генератора є гальмівним моментом, пропорційний струму якоря і магнітному потоку машини.
Механічна потужність, яка перетворюється в електричну:

(8-21)
![]()
(8-22)
Це є закон перетворення механічної енергії в електричну і навпаки — електричної в механічну (без урахування теплових втрат).
3. Реакція якоря. Комутація
Реакція
якоря — це вплив потоку якоря Фя,
створеного струмом навантаження,
на основний потік Ф0,
створений струмом збудження.
Результуючий потік Ф наводить е. р. с.
в обмотці якоря. На рис. 8—-12
зображено
три окремих положення магнітних потоків.
Магнітні силові лінії основного потоку
(рис. 8—12,
а)
мають вісь симетрії, яка збігається з
віссю полюсів. Потік, утворений обмоткою
якоря, збігається з геометричною
нейтраллю машини, яка проходить
через центр якоря (рис. 8—12,
б)
і перпендикулярна до осі полюсів. Потік
індуктора і потік якоря додаються
геометрично, утворюючи один результуючий
потік машини Ф (рис. 8—12,
в).
З рис.
8—1*2,
в
видно, що напрями магнітних потоків
полюсів і якоря під збігаючими краями
полюсів збігаються, а під набігаючими
— не збігаються. Внаслідок цього
результуюче магнітне поле під збігаючими
краями полюсів підсилене, а під
набігаючими — послаблене. Тому вісь
результуючого магнітного потоку, яку
називають фізичною нейтраллю,
розміщується під деяким кутом β
до
осі полюсів. Отже, фізична нейтраль
—
це лінія, що проходить через центр якоря
і перпендикулярна до осі магнітного
поля. Pe-
зультуючий потік Ф у ненасиченій машині майже не змінюється за величиною, тому що ослаблення потоку під набігаючими сторонами компенсується підсиленням під збігаючими сторонами. У насиченій машині із збільшенням навантаження результуючий потік не тільки спотворюється, а й зменшується, бо ослаблення магнітного поля під набігаючими краями полюсів не повністю компенсується підсиленням його під збігаючими краями полюсів.
Зсув фізичної нейтралі спричинює іскріння під щітками, що призводить до обгоряння колекторних пластин, а зменшення результуючого поля — до зменшення е. р. с. Щітки при переході з однієї колекторної пластини на іншу замикають накоротко одну з секцій.
а б в
Рис.
8—12. Магнітне
поле генератора.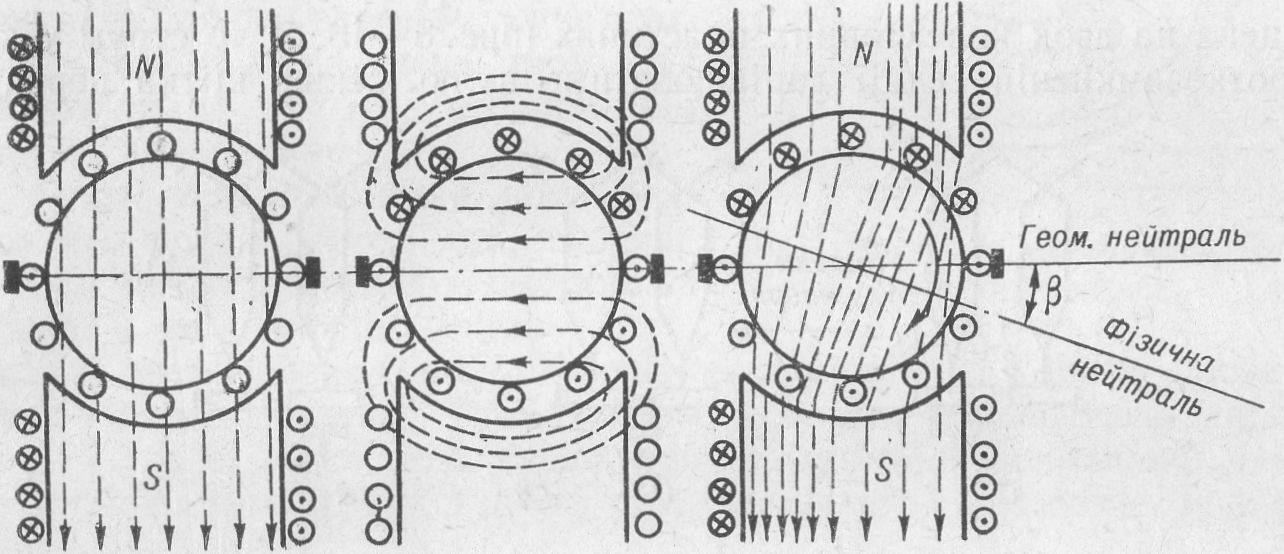
При відсутності реакції якоря витки цієї секції проходять геометричну нейтраль, і в ній не індукується е. р. с., що не спричинює іскріння. Якщо ж існує реакція якоря, то короткозамкн^йа секція при переході щітки з однієї колекторної пластини на другу опиниться в магнітному полі, і в ній індукується е. р. с.; у цій коротко- замкненій секції йде струм, що й призводить до іскріння під щітками при обертанні якоря. Щоб запобігти іскрінню під щітками, їх установлюють на фізичній нейтралі, повернувши щітки разом
з траверсою на кут β (практично до зникнення іскріння) в генератора в напрямі обертання якоря, а в двигуна — проти.
Спаданню напруги на затискачах генератора внаслідок реакції якоря можна запобігти, якщо із збільшенням навантаження відповідно збільшувати струм збудження, що збільшить основний потік.
Іскріння під щітками від пересування їх у фізичну нейтраль не зникне внаслідок комутації струму в короткозамкне- них секціях. Крім того, фізична нейтраль весь час змінюватиметься із зміною струму навантаження. Тому в машинах постійного струму
для усунення іскріння встановлюють додаткові полюси, які буде розглянуто нижче.
Комутація.
При обертанні якоря генератора щітки,
переходячи
з однієї колекторної пластини на іншу, замикають накоротко на деякий час секції, з’єднані з цими пластинами. При цьому відбувається процес перемикання цих секцій з однієї паралельної вітки обмотки якоря на іншу. Процес перемикання секцій з однієї паралельної вітки на іншу і всі явища, що виникають при цьому в ко- роткозамкнених секціях, називаються комутацією.
На
рис. 8—13,
а
показано положення щітки на правій
колекторній пластині. Якщо до щітки
підходить струм Ія,
то в кожній із
паралельних
віток струм дорівнюватиме ~
Ія.
Якщо щітка розміщена на двох
колекторних пластинах (рис. 8—13,
б),
то струм у ко- роткозамкненій секції
дорівнюватиме нулю. Якщо щітка перейде
Напрям
руху якоря
іу~<ДУ2
і”
1Iji

Рис. 8—13. Комутація струму в секції: а — перед комутацією; б — усередині періоду комутації; в — після комутації.
на
ліву колекторну пластину, то струм у
секції, що замикалася накоротко,
змінить
свій напрям на протилежний (рис. 8—13,
в).
Час,
протягом якого щітка переходить з
однієї колекторної пластини на іншу,
називається періодом
комутації.
Як
видно з наведених вище схем, за час
комутації струм у корот- ....
· , 1
,
і
,
козамкненш секції змінює свій напрям
і величину з +γIn
на —^
/я.
Справді,
при зміні струму в короткозамкненій
секції відбувається зміна магнітного
потоку навколо проводів секції, внаслідок
чого у витках цієї секції індукується
е. р. с. самоіндукції ес.
Крім того, у комутуючій секції індукується
е. р. с. комутації ек
від результуючого магнітного поля,
яке існує в зоні комутації внаслідок
реакції якоря.
Отже,
у комутуючій секції матимемо дві е. р.
с.:
ес
і ек,
які алгебраїчно додаються і створюють
результуючу е. р. с. Під впливом
результуючої е. р. с. в короткозамкненій
секції проходитиме струм, який створює
під щіткою іскріння.
Для створення безіскрової комутації на сучасних машинах установлюють додаткові полюси (рис. 8—14). їх беруть меншого
перерізу, ніж головні, і розміщують між собою так, щоб після північного головного полюса був південний додатковий полюс у напрямі обертання якоря генератора. Обмотки додаткових полюсів вмикають послідовно з обмоткою якоря. Через них проходить весь струм навантаження. Магнітний потік додаткових полюсів спрямований назустріч магнітному потоку якоря, а оскільки обидва вони пропорційні струму навантаження, то магнітний потік якоря автоматично компенсується при будь-якому навантаженні.
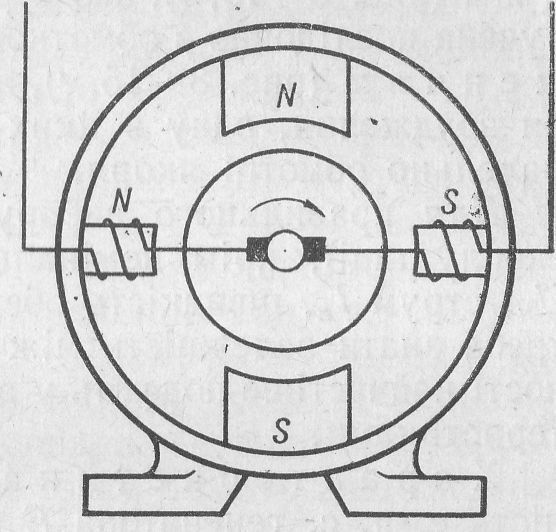 Для
цього додаткові полюси виготовляють
такого перерізу, щоб сталь полюсів не
була насичена, тобто, щоб магнітний
потік був пропорційний струму
навантаження.
Для
цього додаткові полюси виготовляють
такого перерізу, щоб сталь полюсів не
була насичена, тобто, щоб магнітний
потік був пропорційний струму
навантаження.
Число витків обмотки додаткових полюсів розраховують так, щоб маг- Рис 8_14_ Схема вмикання до. нітний потік додаткових полюсів на- даткових полюсів,
водив у комутуючій секції Є. p. C.,
яка
б дорівнювала результуючій е. р. с. ес
+
ек
і була протилежно їй напрямлена.
Таким чином, повністю компенсуючи
шкідливі е. р.
с.,
досягають безіскрової комутації і
нормальної роботи генератора. Щітки
в цьому разі розміщуються на геометричній
нейтралі.
4. Типи генераторів постійного струму
Для створення магнітного потоку в полюсах машини їх обмотка збудження повинна живитись постійним струмом.
Рис.
8—15.
Способи
збудження генераторів: а
—
незалежне; б
— паралельне; в
—
послідовне; з
— мішане.
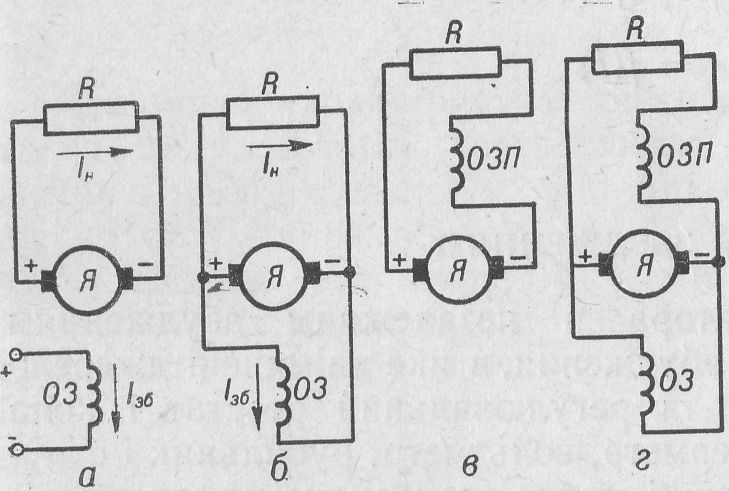
Генератори з незалежним збудженням не поширилися, бо обмотку збудження простіше живити від якоря того самого генератора, тобто робити їх із самозбудженням.
Генератори
з самозбудженням за способом сполучення
обмотки збудження розрізняють: 1)
з
паралельним
збудженням (рис.
8—15,
б),
або шунтові, в яких обмотка збудження
сполучена паралельно обмотці якоря; 2)
з
послідовним
збудженням
(рис. 8—15,
в),
або серієсні, в яких обмотка збудження
сполучена послідовно з обмоткою
якоря; 3)
із
м і ш а н и
м
збудженням
(рис. 8—15,
г),
або компаундні, що мають дві обмотки
збудження, одну з яких вмикають послідовно,
а другу — паралельно обмотці якоря.
Для
правильного вибору типу генератора і
правильної його експлуатації, крім
номінальних даних (потужність Рн,
напруга Uh,
струм
Ін,
швидкість обертання пн),
які є в паспорті машини, треба знати
залежність між деякими його величинами.
Ці залежності найчастіше подають у
вигляді кривих, що називаються
характеристиками.
Характеристика
холостого ходу
— залежність е. р. с. генератора E
від
струму збудження I36
при
сталому числі обертів п
і відсутності струму якоря /я,
тобто:
.E = U0 = f (I36)
при
п
=
const і
Ія
=
0, де
U0
—
напруга генератора при холостому
ході.
Зовнішня характеристика — залежність напруги на затискачах генератора від струму навантаження при сталих обертах і сталому опорі кола збудження, тобто
U
=
У(/)
при
п
=
const і
τзб
=
const (або
I36
=
const).
Регулювальна характеристика — залежність струму збудження від струму навантаження при сталих обертах і напрузі на затискачах генератора, тобто
136 = /(/)
при
п
=
const і
U
=
const.
5. Генератор з незалежним збудженням
Електрична схема генератора з незалежним збудженням (рис. 8—16) складається з кола збудження, в яке ввімкнені джерело постійного струму, амперметр та регулювальний реостат і кола якоря; в останнє ввімкнені амперметр, вольтметр, рубильник і струмоприймач. Обидва кола незалежні, тобто електрично не сполучені.
Якщо
обертати якір генератора з номінальною
швидкістю і поступово змінювати
регулювальним реостатом тр
струм збудження в колі збудження, то із
збільшенням струму збільшуються
магнітний
потік і е. р. с. генератора. Утворена при цьому залежність E = = U0 = /(/Зб) є характеристикою холостого ходу (рис. 8—17). При збільшенні і зменшенні струму збудження діставатимемо різні криві внаслідок явища гістерезису. За практичну характеристику холостого ходу беруть середню криву (зображена штриховою лінією).. Як видно з рисунка, крива U0 = /(/.,б) спочатку має прямолінійний характер, тому що до насичення сердечників Ф = f(I3 і, отже, E також пропорційна I36- Магнітне насичення сердечників порушує цю пропорційність, і потім із збільшенням струму збудження характеристика поступово загинається і йде майже паралельно осі абсцис. Точка а характеристики, ) P11 що відповідає номінальній напрузі, лежить.
 I
l—і на
коліні кривої. Якби вона лежала на
I
l—і на
коліні кривої. Якби вона лежала на
І початковій прямолінійній частині кривої, напруга дуже змінювалася б при зміні навантаження. Якщо ця точка лежить вище коліна кривої, то обмежується можливість регулювати напругу.
Рис. 8—16. Електрична схема генератора
з незалежним збудженням.
Рис. 8—17. Характеристика холостого ходу генератора з незалежним збудженням.
Рис. 8—18. Зовнішня характеристика генератора з незалежним збудженням.
Зовнішню характеристику генератора {/ = /(/) (рис. 8—18) дістаємо так: спочатку встановлюємо номінальний струм навантаження і напругу, а потім, не змінюючи струму збудження, зменшуємо струм навантаження до 0, вимірюючи при цьому напругу на затискачах генератора. Як видно з кривої (рис. 8—18), напруга генератора із зменшенням його навантаження збільшується. Це зумовлено, по-перше, зменшенням реакції якоря і, отже, посиленням загального магнітного потоку, а по-друге, зменшенням втрати напруги в обмотці якоря.
Напруга на затискачах генератора при номінальному навантаженні дорівнює його е. р. с. мінус спад напруги в обмотці якоря:
Спад
напруги MI
5-10%
від
UH:
Δ
U
100%.
(8-24)
Uo-Uh
и„

Регулювальна характеристика зображена нарис. 8—19. Її знімають, змінюючи струм навантаження і регулюючи струм збудження так, щоб напруга на затискачах генератора була сталою. При збільшенні струму навантаження слід збільшувати струм збудження, а це призведе до збільшення потоку і, отже, е. р.с. генератора.
/
^егулю' з незалежним збудженням. Вони застосовую- вальна характеристика J . J
генератора з незалеж- ться в схемах електроприводів з широким
ним збудженням. діапазоном регулювання напруги.
6. Генератор з паралельним збудженням (шунтовий)
Рис.
8—20.
Електрична
схема генератора з паралельним
збудженням.
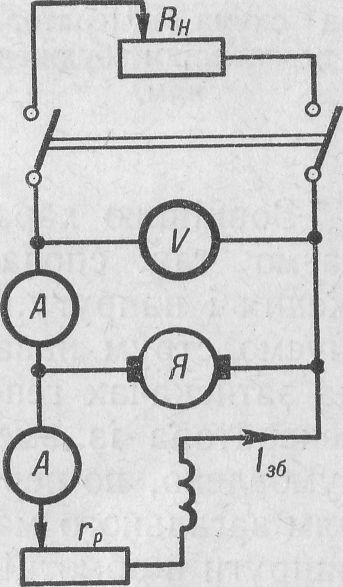
Збільшений магнітний потік створює більшу е. р. с. в якорі, що в свою чергу збільшує струм в обмотці збудження і, отже, магнітний потік, і т. д. Таким чином, після пуску генератора із самозбудженням е. р. с. обмотки автоматично зростає до розрахункової максимальної величини, яка обмежується магнітним насиченням сталі полюсів. Цей процес проходить дуже швидко. Для сповільнення його в коло обмотки збудження вмикають регулювальний реостат гр, яким поступово змінюють струм збудження і дістають характеристику холостого ходу E = U0 = f(Is6)
при п = const і 1 = 0, подібну до характеристики генератора з незалежним збудженням (рис. 8—17).
Зовнішня характеристика генератора (крива / на рис. 8 21) різко відрізняється від тієї самої характеристики при незалежному збудженні (крива 2). При зменшенні опору навантаження струм генератора з незалежним збудженням весь час зростає. При короткому замиканні струм досягає недопустимих розмірів І'к.3, бо ослаблений реакцією якоря магнітний потік все ще має значну величину і індукує в обмотці якоря порівняно велику е. р. с.
'оз
-Г '
а
Рис.
8—21.
Зовнішня
характеристика генератора з
паралельним збудженням.
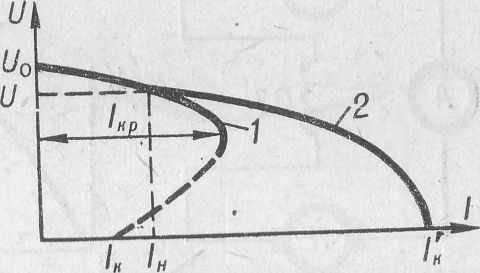
чергу призводить до зниження напруги (див. криву 1). При певному опорі зовнішнього кола струм навантаження досягає свого критичного значення Ікр, який дорівнює (2 -ч- 2,5) /„. Напруга із зменшенням зовнішнього опору також зменшується. Потім напруга починає спадати швидше, ніж зменшення опору навантаження, що призводить до зменшення струму (штрихова частина кривої 1). При короткому замиканні на затискачах генератора магнітний потік генератора дорівнюватиме залишковому магнітному потоку, яки'і індукує в обмотці якоря невелику е. р. с. Ця е. р. с. створює струм короткого замикання, менший за номінальний струм, а тому ніяких пошкоджень у генераторі не спричинює.
При номінальному навантаженні спад напруги AU в генераторів малої і середньої потужності без додаткових полюсів досягає — 12—20% від Uh, а в генераторів з додатковими полюсами — 8-15% від Uh.
Щоб дістати сталу напругу на затискачах генератора, слід із збільшенням струму навантаження збільшувати струм збудження. При цьому зростає магнітний потік Ф, внаслідок чого збільшується і е. р. с. машини Е, оскільки E=ceti Ф. Якщо одночасно із збільшенням спаду напруги в якорі Іякя внаслідок збільшення навантаження відповідно збільшуватиметься і е. р. с. машини Е, то, як видно з формули U = E — Ія Rsl, напруга на затискачах генератора підтримуватиметься сталою. Залежність струму збудження від струму навантаження Ib6 = f(I) при п = const і U = const є регулювальною характеристикою генератора, аналогічною до регулювальної характеристики генератора з незалежним збудженням (рис. 8 — 19). Генератори з паралельним збудженням широко застосовують для живлення установок, в яких немає різких коли
вань навантаження. Різкі коливання навантаження спричинюють різкі коливання напруги генератора, що недопустимо для нормальної експлуатації споживачів.
7. Генератор з послідовним збудженням (серієсний)
1
>
Із збільшенням
Рис.
8—23.
Зовнішня
характеристика генератора з
послідовним збудженням.
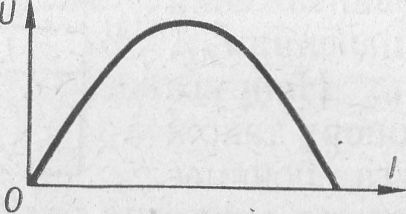
Рис.
8—22.
Електрична
схема генератора з послідовним
збудженням.
Таким чином, напруга серієсного генератора при змінному навантаженні різко змінюється, є нестійкою, а тому серієсні машини в режимі генератора не застосовуються.
8. Генератор із мішаним збудженням (компаундний)
Електрична схема генератора із мішаним збудженням зображена на рис. 8—24. Генератор має дві обмотки збудження, одна з яких увімкнена паралельно обмотці якоря, а друга — послідовно з нею. Обидві обмотки розміщують на тих самих полюсах і звичайно вмикають узгоджено, тобто так, що їх магнітні потоки додаються. Наявність двох обмоток збудження надає компаундному генератору властивостей одночасно шунтового і серієсного генераторів. Число витків обмоток збудження підбирають так, що напруга генератора з мішаним збудженням при зміні навантаження лишається майже сталою. У цьому його велика перевага перед іншими генераторами. Зовнішня характеристика U = f(I) являє собою поєднання зовнішніх характеристик шунтового і серієсного генераторів. Напруга на затискачах генератора
Рис.
8—25.
Зовнішні
характеристики генератора з мішаним
збудженням:
крива
а
— при узгодженому вмиканні обмотки
збудження; крива б — при зустрічному
вмиканні обмотки збудження.
Рис.
8—26.
Регулювальна
характеристика компаундного
генератора.
Рис.
8—24.
Електрична
схема генератора з мішаним
збудженням.
де
/я
=
/ -f- і3б
— сума струмів навантаження і
збудження
паралельної обмотки; г0.3.
„ — опір серієсної обмотки збудження.
При
зміні навантаження напруга є стійкішою
і зі збільшенням на-
вантаження
спочатку (до магнітного насичення)
навіть збільшу-
ється (рис. 8—25,
крива
а).
У
деяких випадках бажано при значних
коливаннях
напруги мати майже сталий струм
Ί
.
у споживачі, наприклад у прожекторних
і зва-
J
рювальних
установках. Для цього застосовують
зустрічне
вмикання обмоток збудження (рис.
KjT)-——і
8—25,
крива
б).
Зовнішня характеристика стає
-s.
круто спадною, напруга буде несталою
і генера-
тор
на себе великого навантаження не візьме.
Характеристику
холостого ходу знімають аналогічно до
шунтового генератора.
Регулювальна
характеристика зображена на рис. 8—26
і
пояснення не потребує.
Генератори
з мішаним збудженням широко застосовують
для живлення установок з різкими і
частими коливаннями навантажень.
8—9.
ВТРАТИ
І КОЕФІЦІЄНТ КОРИСНОЇ ДІЇ
Перетворення
механічної енергії в електричну в
генераторах відбувається з певними
втратами енергії, які поділяють на:
постійні
втрати,
тобто втрати в сталі і механічні втрати;
змінні
втрати
— втрати енергії в міді обмотки якоря
і в обмотці збудження.
Втрати
в сталі.
При обертанні якоря в магнітному полі
полюсів генератора сталь якоря
перемагнічується. Втрати енергії на
перемагнічування сталі залежать від
обертів, тобто частоти перемагнічування
/ =
~
,
і називаються втратами на гістерезис
Рг.




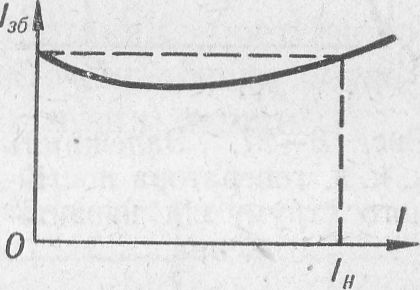
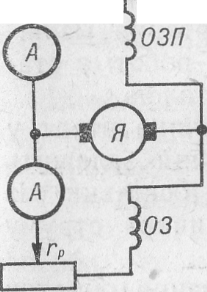
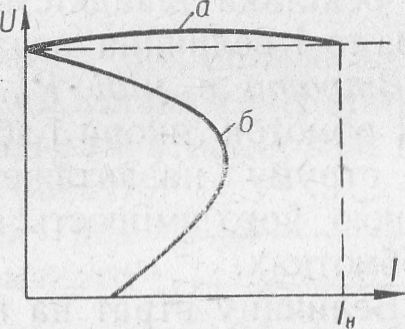
Крім того, при зміні магнітного потоку Ф в листах сталі індукуються вихрові струми, які нагрівають їх. Це так звані втрати на вихрові струми Рв.с. Величина втрат енергії в сталі дорівнює сумі обох втрат
Pcm = Pt +Рв.с. (8-26)
Втрати на гістерезис і вихрові струми визначаються за емпіричними формулами і таблицями.
Рис.
8—27.
Залежність
к. к. д. генератора постійного струму
від навантаження.
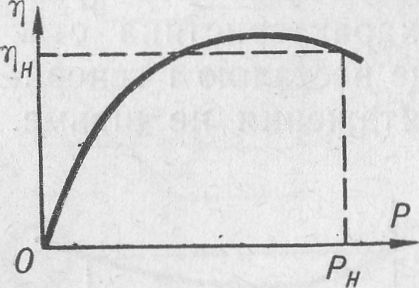
Втрати в міді Рм. Величина втрат у міді обмоток якоря і збудження залежить від струму навантаження, оскільки із зміною його змінюється величина струму в обмотках.
Величину втрат на нагрівання обмоток генераторів визначають за такими формулами.
Для машин з паралельним збудженням:
Pm = IlRa + IW п. + иізб, (8 -27)
Гд. „—опір обмотки додаткових полюсів.
Для машин з послідовним збудженням:
Pm — IhRh + I >/ д. п + І яГ посл , (8—28)
де гпосл — опір послідовної обмотки збудження.
Для машин з мішаним збудженням:
Pm — IhRhjT І я^д. п + ІяГпосл + UI3S- (8—29)
Коефіцієнтом корисної дії (к. к. д.) машини постійного струму називають відношення корисної потужності P2, яку віддає машина, до повної потужності P1, яка підводиться до машини:
η = 5 . 100о/0 . (8-30)
г 1
Для генераторів корисна потужність P2 = UIh; підведена потужність P1 = P2 + Vp, де Yp = Pcm + Рмех + Pm-
При зміні навантаження генератора змінюється його к. к. д. (рис. 8—27). Максимальне значення к. к.д. буде при навантаженні 80—100% від номінальної потужності машини.
Машини малої і середньої потужності (до 100 кет) мають к. к. д. 75—90%. Машини великої потужності (500—1000 кет) мають к. к. д. 91—95%.
10 Паралельна робота генераторів постійного струму
Електричні станції і перетворювальні підстанції постійного струму звичайно мають кілька генераторів, щоб забезпечити безперебійне постачання енергії і найкраще використання машин.
Навантаження
Рис.
—28.
Схема
вмикання шунтових генераторів на
паралельну роботу.

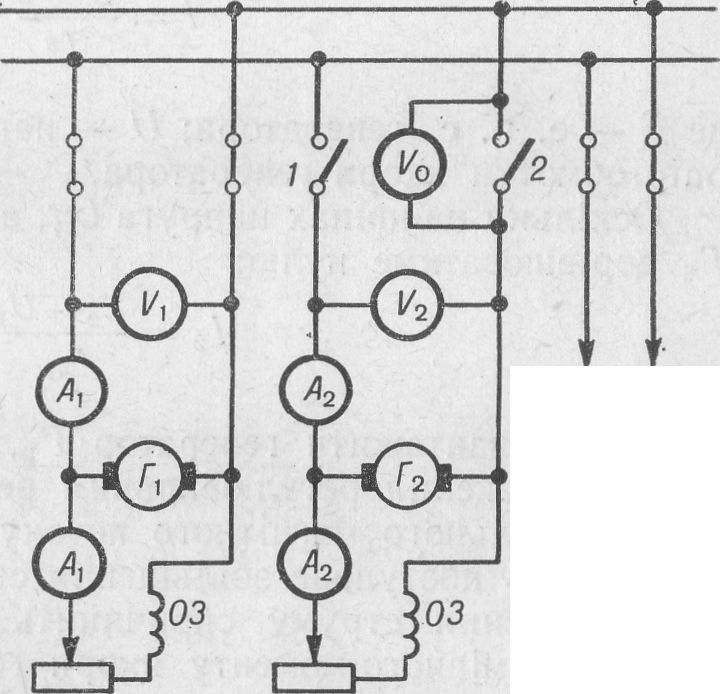
Послідовне, коли між собою сполучають точки з різнойменними потенціалами, тобто «плюс» одного генератора з «мінусом» другого. Але цей спосіб застосовують дуже рідко, бо при виході з ладу одного з генераторів порушується робота всієї установки .
Паралельне, коли між собою сполучають точки з однойменними потенціалами, тобто «плюс» одного генератора з «плюсом» другого. Паралельне
сполучення генераторів найбільш поширене, бо забезпечує надійність роботи цілої установки.
Розглянемо паралельну роботу лише шунтових генераторів. На рис. 8—28 подано електричну схему двох генераторів, один з яких Г! увімкнений на збірні шини і працює під навантаженням. Щоб увімкнути другий генератор Г2 до тих самих шин, потрібні дві умови:
полярності «плюс» і «мінус» генератора Г2 при вмиканні повинні відповідати тим самим полярностям збірних шин;
е. р. с. генератора Г2 повинна дорівнювати напрузі U1 на збірних шинах.
Для виконання цих умов генератор Г2 приводять у рух з потрібного швидкістю і, не збуджуючи його, замикають один з його однополюсних рубильників, наприклад рубильник 1. Якщо до розімкне- ного рубильника 2 приєднати чутливий вольтметр V0, то він виміряє напругу U1. Якщо тепер почнемо поступово збуджувати генератор F2, і вольтметр свої покази збільшуватиме, це означає, що полярність виводів генератора не збігається з полярністю шин, тобто обидва генератори сполучені послідовно, тому вольтметр вимірює суму U1^-E2. У цьому разі вмикати генератор Г2 не ■можна, бо це відповідало б короткому замиканню обох машин.
Навпаки, якщо полярність генератора F2 збігається з полярністю шин, то вольтметр V0 почне зменшувати свої покази при збільшенні збудження, вимірюючи різницю U1 — Е. Коли ця різниця дорівнюватиме нулю, то можна ввімкнути рубильник 2 і тим самим увімкнути генератор Г2 на паралельну роботу.
Струм у кожному генераторі визначають за формулою
F-U
І = ϊ-yf- , (8-32)
де E — е. р. с. генератора; U — напруга на збірнях шинах; гя — опір обмотки якоря генератора.
Оскільки на шинах напруга U1, a E2- U1, то струм генератора F2 дорівнюватиме нулю:
І = = 0.
Щоб навантажити генератор F2, треба поступово збільшувати струм збудження регулювальним реостатом. Це приведе до посилення загального магнітного потоку і до збільшення е. р. с., що спричинить поступове збільшення струму навантаження.
Збільшення струму спричинить збільшення електромагнітної сили і гальмівного моменту якоря генератора. Щоб зберегти швидкість обертання якоря генератора, спочатку треба збільшити обертальний момент первинного двигуна і потужність, яку він розвиває, тобто збільшити подачу палива, пари або води, а якщо первинним двигуном є трифазний асинхронний двигун, то він сам автоматично збільшить споживання струму з мережі і тим збільшить свій обертальний момент.
Напругу на шинах станції регулюють, змінюючи е. р. с. працюючих генераторів. Цього досягають одночасно змінюючи їх струми збудження.
Якщо генератор треба вимкнути, то спочатку його розвантажують, тобто зменшують його струм навантаження до нуля, після чого вимикають рубильник. Для розвантаження треба зменшити
е. р. с. до напруги на шинах, зменшуючи струм збудження, і вимкнути генератор.
Нагадаємо, що при надмірному зменшенні е. р.с. (е. р. с. менша за напругу на шинах) різниця E — U стане від’ємною. Це означатиме, що генератор почне споживати струм з мережі, тобто перейде в режим роботи двигуна, що є небажаним і небезпечним, тому що наявність двох двигунів на одному валі може призвести до аварій.
Щоб уникнути цього явища, на електростанціях ставлять реле зворотного струму і автомати, які автоматично вимикають генератор, коли його е. р. с. стане меншою за напругу на шинах.
Після вимкнення генератора треба поступово збільшити опір регулювального реостата до кінця, а потім зупинити первинний двигун.
ЕЛЕКТРИЧНІ ДВИГУНИ ПОСТІЙНОГО СТРУМУ
9—1. ПРИНЦИП ДІЇ І ОБЕРТАЛЬНИЙ МОМЕНТ ДВИГУНІВ ПОСТІЙНОГО СТРУМУ
Електричні машини постійного струму, як і всі електричні машини взагалі, є оборотними, тобто вони без будь-яких конструктивних змін можуть працювати і як генератори, і як двигуни.
Принцип дії електродвигунів грунтується на взаємодії магнітного поля статора Ф із струмом якоря /я. Електромагнітний момент, який виникає при цьому, приводить якір в обертальний рух. Наявність колектора в двигунах постійного струму забезпечує зміну напряму струму в обмотках якоря при переході полюсів через геометричну нейтраль. Завдяки цьому обертальний момент залишається сталим за напрямом і величиною.
Якщо підвести до якоря двигуна постійну напругу U (рис. 9—1), то виникає обертальний електромагнітний момент At, напрям якого визначається за правилом лівої руки. Під впливом цього моменту якір двигуна почне обертатися в напрямі моменту з певним числом обертів п. При обертанні якоря його провідники перетинатимуть силові лінії магнітного поля статора, і в них індукуватиметься е. р. с. Е, яка спрямована (за правилом правої руки) назустріч струму, тобто назустріч підведеній напрузі LI. На цій підставі індукована е. р. с. називається зворотною е. р. с., або проти-е. р.с. Якщо в якийсь момент струм якоря становить І я, магнітний потік полюсів Ф і число обертів якоря п не змінюється за величиною, то рівняння е. р. с. для двигуна матиме вигляд
U-E = I4Rn,
звідки
и = Е + І^я. (9-1)
Отже, прикладена до двигуна напруга зрівноважується проти-е. р.с. двигуна і спадом напруги е. р. с. на активному опорі кола якоря Rh при npq-
ходженні по ньому струму Ія. Складова IilRa називається омічним спадом напруги в колі якоря.
Якщо обидві частини рівняння (9—1) помножити на Ія, то рівняння матиме такий вигляд:
(9-2)
З рівняння видно, що підведена до якоря двигуна потужність дорівнює сумі електромагнітної потужності, що передається на вал двигуна Ela = Рем, і потужності, яка йде на покриття втрат у колі якоря I2aRa.
Електромагнітна потужність Рем більша від потужності на валі двигуна P2 на величину потужності, що витрачається при холостому ході P0.
Тому Рем = P2 + P0- (9—3)
то
дістанемо рівняння
(9-4)
Рис.
9—1.
Принцип
роботи двигуна постійного струму.
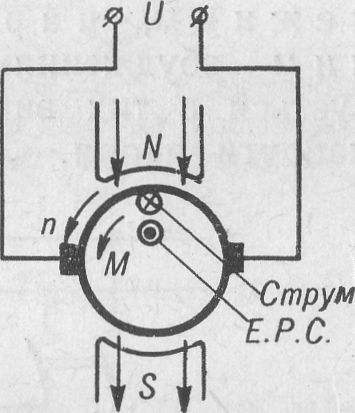
Р '· _ P2 , Po
або
Мем — M2 + M0.
Отже, обертальний електромагнітний момент двигуна Мем дорівнює сумі двох моментів: корисного гальмівного моменту M2, створюваного приводом, і гальмівного моменту при холостому ході Ai0, який виникає внаслідок тертя всередині двигуна і втрат у сталі. Підставимо в рівняння електромагнітної потужності значення проти-е. р. с.
сеп
Ф =
η
Ф
і поділимо обидві його частини на
кутову швидкість:
EL
60а я 2π п/60
або
(9-5)
Ми дістали рівняння електромагнітного моменту двигуна постійного струму.
Потужність двигуна постійного струму:
Рем = Мем · CO (н · м/сек) = Мем ■ ω (β/л). (9—6)
Якщо обертальний момент вимірюватиметься в кГм, то попередня формула перепишеться так:
Рем = 9,8Ш · ω (кГм/сек) = 9,8Ш · ω (вт) = 1,028пМ (вт). (9—7)
Формула електромагнітного моменту двигуна (9—5) аналогічна до формули (8—20) електромагнітного моменту генератора з тією різницею, що в генераторі момент є гальмівним, а в двигуні — обертаючим. З формули (9—5) видно, що зміна напряму обертання двигуна можлива при зміні напряму струму збудження І3д в обмотці збудження або напряму струму в якорі Ія. При одночасній зміні напряму обох струмів напрям обертання двигуна не змінюється.
2. Способи збудження і пуск двигунів постійного струму
Двигуни постійного струму, як і генератори, бувають з незалежним, паралельним, послідовним і мішаним збудженням. Незалежне збудження (рис. 9—2) застосовується в тих випадках, коли напруга збудження відмінна від напруги якоря.
R36
~г
_ormrv_
03
П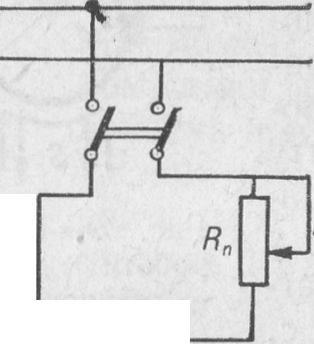
Рис.
9—3.
Електрична
схема двигуна постійного струму з
паралельним збудженням.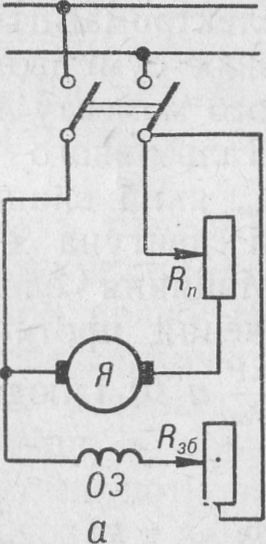
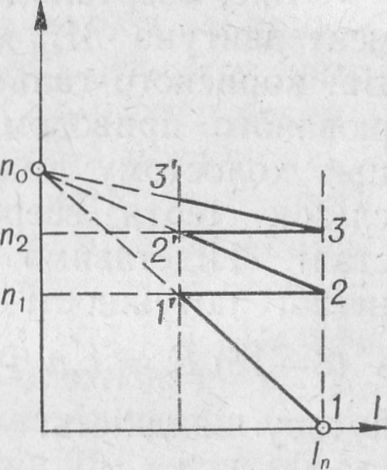
У двигунах з паралельним збудженням (рис. 9—3) напруга сітки однакова для якоря і для обмотки збудження. Номінальний струм двигуна Ih дорівнює сумі струмів у якорі і в обмотці збудження:
Двигуни з послідовним збудженням (рис. 9—4) мають обмотку збудження, яка послідовно приєднана до обмотки якоря, тому струм якоря є струмом збудження: Ih = Ія = I36.
Електромагнітний момент для цього двигуна пропорційний квадрату струму:
Мем = Cm ■ ФІ = с’мР, (9-9)
тому що основний потік для ненасиченої машини пропорційний струму: Ф = ki.
Рис.
9—4.
Електрична
схема двигуна постійного струму з
послідовним збудженням.
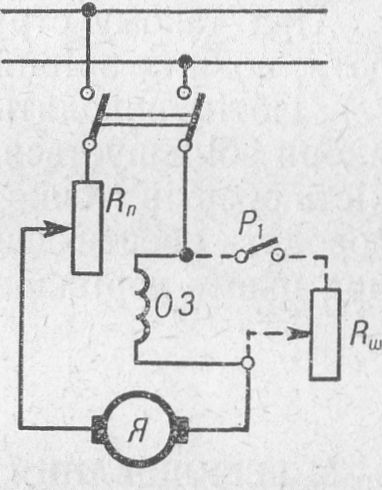
Послідовна обмотка збудження має невелику кількість витків і може бути ввімкнена узгоджено або зустрічно. У першому випадку її електромагнітне поле підсилюватиме поле основної паралельної обмотки, а в другому — послаблюватиме.
Пускають двигун постійного струму за допомогою пускового реостата. Це пояснюється тим, що в момент пуску проти- е. р. с. дорівнює нулю (E = 0), тому струм у якорі буде в 8—10 раз більший, ніж номінальний. Опір обмотки якоря малий (десяті або навіть соті частки ома).
U £
За формулою (9—1) струм якоря Ія = —„— . При пуску п = 0,
^Я
тому E — ЫФ = 0, тоді
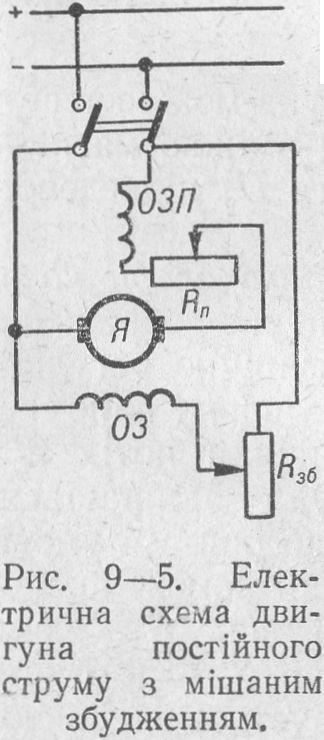 І
я =
(8—Ю)
Ін·
(9-Ю)
І
я =
(8—Ю)
Ін·
(9-Ю)
^ Я
Для обмеження пускового струму послідовно з якорем вмикають пусковий реостат Rn, який у міру розгону двигуна поступово повністю виводиться. Пусковий струм визначається за формулою:
1^ = R^r.^(1.5-5-2,0)/*, (9-11)
де Rn — пусковий опір.
Щоб мати потрібний пусковий момент, опір пускового реостата вибирають таким, щоб пусковий струм був більший від номінального в 1,5—2,0 рази. Крім того, для збільшення пускового моменту і полегшення пуску паралельну
обмотку збудження вмикають на повну напругу мережі, для чого регулювальний реостат у колі паралельного збудження виводять повністю. Процес пуску двигуна з триступеневим пусковим реостатом зображено на рис. 9—3, б. Під дією пускового обертального моменту M = смФ /я ротор двигуна почне обертатись і в якорі виникне проти-е. р. с. Тоді струм якоря визначається з формули електричної рівноваги U = E + Ія (Ra + Rn):
<9-12)
При такому струмі якоря обороти двигуна збільшуватимуться доти, поки не зрівняються обертальний і гальмівний моменти (точка Ґ). Потім виводять черговий ступінь пускового реостата, і струм якоря збільшується (точка 2), а отже, збільшується момент і кількість обертів (точка 2'). Так, поступово виводячи пусковий реостат, доводять оберти двигуна до номінальних (точка З'). Струм у якорі при цьому дорівнюватиме
І я = (9-13)
3. РЕГУЛЮВАННЯ ШВИДКОСТІ ОБЕРТАННЯ TA РЕВЕРСУВАННЯ ДВИГУНІВ ПОСТІЙНОГО СТРУМУ
І. Регулювання швидкості обертання двигунів з паралельним збудженням. Якщо в коло якоря ввімкнено регулювальний реостат Rp, то швидкість обертання двигуна з паралельним збудженням визначається за формулою:
B. + ^, (9_14)
З формули видно, що швидкість обертання двигуна можна регулювати трьома способами: зміною опору кола якоря; зміною магнітного потоку Ф (струму збудження); зміною напруги U, підведеної до двигуна.
Регулювання швидкості обертання двигуна зміною опору кола якоря. Схема регулювання швидкості обертання двигуна зображена на рис. 9—3, а, де пусковий реостат Rn виконує функцію регулювального реостата. Обмотку збудження вмикають на повну напругу мережі, внаслідок чого утворюється сталий магнітний потік Ф. Припустимо, що гальмівний момент на валі двигуна залишається сталим і не залежить від швидкості обертання. Якщо при цій умові зменшити опір регулювального реостата, то в перший момент швидкість обертання п внаслідок інерції не встигне змінитись. У зв’язку з цим не зміниться і проти-е. р. C., оскільки E = сеп Ф. Тоді струм якоря, що визначається за формулою (9—12), збільшується обернено
пропорційно опору (Rn + Rp). Внаслідок цього порушується рівновага між обертальним і гальмівним моментом (обертальний момент стає більшим за гальмівний момент). Внаслідок цього швидкість обертання двигуна і його проти-е. р. с. збільшуватимуться, а струм якоря In зменшуватиметься доти, поки не досягне свого попереднього значення. Обертальний момент при цьому дорівнюватиме гальмівному моменту при новій більшій швидкості обертання. Якщо при сталих опорах у колі якоря збільшувати гальмівний момент, то швидкість обертання двигуна спадатиме. Цей спосіб дає можливість регулювати швидкість обертання двигуна в досить широких межах, але він є невигідний через великі втрати в реостаті і зменшення к. к. д.
Рис.
9—6.
Характеристика
холостого ходу двигуна з паралельним
збудженням.
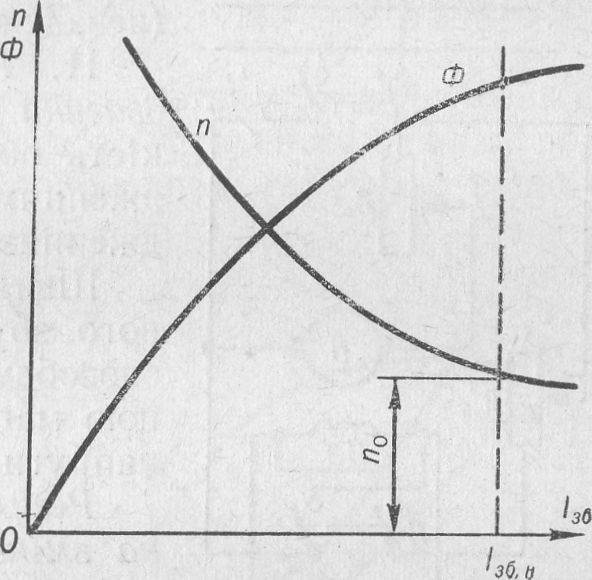
Усі перемикання виконують за допомогою спеціального перемикач а — ко нтрол ер а.
Регулювання швидкості обертання двигуна зміною магнітного потоку. Припустимо, що гальмівний момент двигуна і напруга залишаються сталими і не залежать від швидкості обертання двигуна. Якщо зменшити опір у колі збудження, то струм збудження і магнітний потік Ф також збільшаться (рис. 9—6). У перший момент швидкість обертання п внаслідок інерції не зміниться. З рівняння U = E + InRsi = сепФ + InRn = const видно, що збільшення магнітного потоку Ф спричинить зменшення струму в якорі In = -~^еПф .
я
Оскільки проти-е. р.с .E набагато більша від спаду напруги InRn в колі якоря, то навіть при невеликому збільшенні магнітного потоку Ф струм у якорі різко зменшується. Внаслідок цього обертальний момент стає меншим, ніж гальмівний, і швидкість двигуна п та проти-е. р. с. зменшуватимуться, а струм якоря почне збільшуватись доти, поки не поновиться рівновага між моментами. При цьому способі регулювання швидкості к. к. д. двигуна майже не змінюється.
При холостому ході крива п = f(I36) при U = const називається характеристикою холостого ходу двигуна. При великих значеннях струму збудження (див. рис. 9—6) крива
η — j(lзо) зменшується набагато (впливає насичення індуктора) і далі йде майже паралельно осі абсцис.
При певному навантаженні двигуна і сталій напрузі крива п = /(/*) має такий самий вигляд, але розміщується трохи нижче.
Регулювання швидкості обертання зміною підведеної до двигуна напруги.
версування
двигуна постійного струму з паралельним
збуджен-
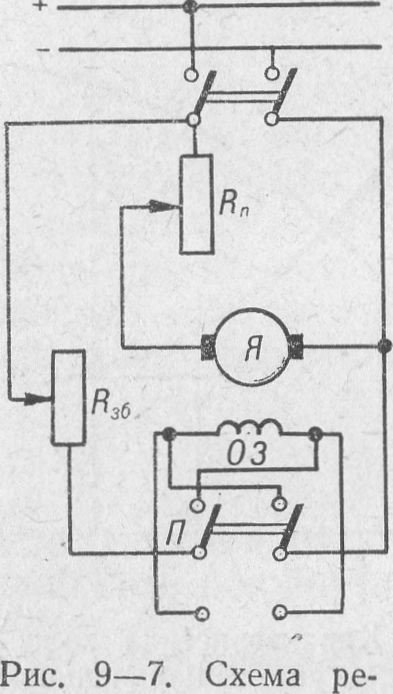
Регулювання швидкості обертання двигуна з послідовним збудженням. Швидкість обертання двигуна з послідовним збудженням, як і двигуна з паралельним збудженням, визначається за формулою (9—14).
Швидкість обертання двигуна послідовного збудження можна регулювати трьома способами: зміною опору кола якоря; зміною магнітного потоку Ф статора; зміною напруги U, підведеної до двигуна.
Регулювання швидкості обертання двигуна зміною опору кола якоря. Регулювання двигуна таким способом аналогічне до регулювання двигуна з паралельним збудженням. Здійснюється таке регулювання за допомогою реостата Rn-
Регулювання швидкості обертання двигуна зміною магнітного потоку Ф. Магнітний потік в обмотці збудження двигуна змінюють шунтуючим реостатом Rui (рис. 9—4). Якщо двигун має сталий гальмівний момент, незалежний від швидкості обертання, то при вимкненому рубильнику P1 струм збудження дорівнюватиме струму якоря I3Q = /я. При цьому обертальний електромагнітний момент визначиться за формулою Aie* = см ІяФ, а рівняння електричної рівноваги буде U = E + ІяКя (пусковий реостат повністю виведений). Оскільки спад напруги IxRn дуже малий, то, нехтуючи ним, дістанемо: U^E = сепФ. Отже, при сталій напрузі U = const на затискачах двигуна швидкість обертання п і магнітний потік Ф залежать один від одного. Якщо ввімкнено рубильник P1, то струм в обмотці якоря збільшиться, внаслідок чого обертальний момент стане більшим, ніж гальмівний, і швидкість обертання двигуна збільшуватиметься.
Процес зміни швидкості обертання триватиме доти, поки обертальний момент’знову не дорівнюватиме гальмівному моменту і двигун не обертатиметься з новою ПОСТІЙНОЮ ШВИДКІСТЮ H1 > п.
Такий спосіб регулювання є найекономічнішим і дає можливість плавно регулювати швидкість обертання двигуна.
Напрям дії обертального моменту двигуна можна змінити, змінюючи напрям струму якоря I1 або полярність полюсів зміною напряму струму збудження. Схема реверсування двигуна з паралельним збудженням зображена на рис. 9—7. Напрям струму в обмотці збудження змінюють перемикачем П.
4. Характеристики двигунів постійного струму
Властивості всіх електричних двигунів і, зокрема, двигунів постійного струму визначаються за сукупністю трьох видів характеристик: пускових, робочих і регулювальних.
Пускові характеристики визначають властивості двигуна від моменту пуску до моменту переходу його до усталеного режиму роботи. До цих характеристик належать пусковий струм In, пусковий момент Mn, час пуску та ін.
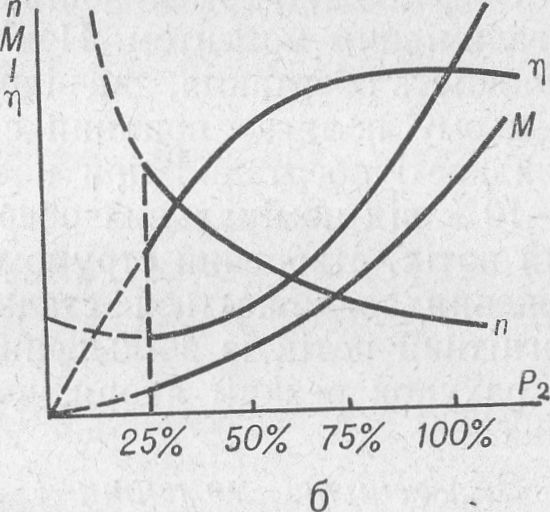 і
і
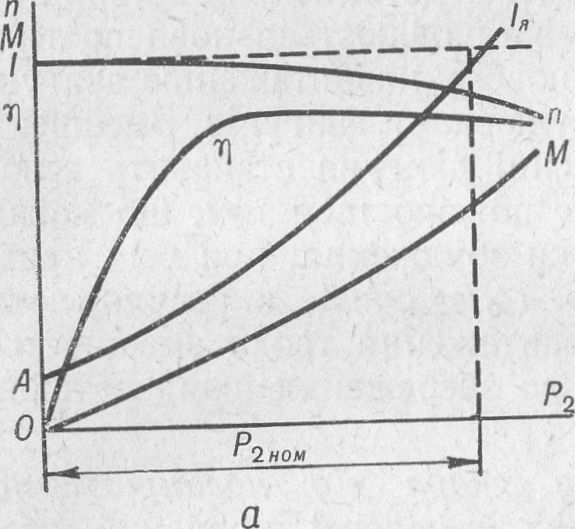
Рис. 9—8. Робочі характеристики:
а — двигуна з паралельним збудженням; б — двигуна з послідовним збудженням.
Робочі характеристики визначають властивості двигуна при усталеному режимі роботи. До них належать залежності η, М, Ія і η = /(P2) при U = Uh = const. До робочих характеристик належить і механічна характеристика двигуна: n = /(M) при U = const і /Зб = const.
Регулювальні характеристики визначають властивості двигунів при регулюванні швидкості їх обертання. До них належать: межі регулювання, характер регулювання (плавний чи ступінчастий), а також простота і надійність регулюючої апаратури.
Розглянемо робочі характеристики двигунів з паралельним і послідовним збудженням.
І. Робочі характеристики двигунів з паралельним збудженням.
Робочі характеристики двигунів з паралельним збудженням зображені на рис. 9—8, а. Вони є виразом залежності швидкості обертання п, струму якоря Ія, електромагнітного моменту M і
κ. κ. д. η від корисної потужності P2 на валі двигуна при сталій номінальній напрузі Uh на його затискачах і сталому струмі збудження І об, тобто: п, Ія, M і η = / (Р?) при U = Uh = const і І о = І об. н Const.
Іноді розглядають залежність η, І, η і P2 від корисного моменту на валі M2= Мем — M0 або залежність п, Мем, η і P2 від струму в якорі /я.
Швидкісна характеристика п = f(P2). При номінальній напрузі і відсутності навантаження (холостий хід) струм якоря буде незначним і визначиться ординатою OA.
Збільшення навантаження на валі двигуна є збільшення гальмівного моменту. При цьому оберти двигуна і проти-е. р. с. повільно зменшуються (див. рис. 9—8, а). Із зменшенням проти-е. р. с. струм якоря I1 збільшиться, а це зумовить збільшення обертального моменту двигуна, оскільки він пропорційний струму.
Обертальний момент збільшуватиметься доти, поки не зрівняється з гальмівним моментом. При цьому встановлюється нова постійна швидкість обертання, яка відповідає новому навантаженню двигуна. У цьому полягає принцип саморегулювання двигунів. Зменшення швидкості обертання при навантаженні двигуна становить всього 5—10% від номінальних обертів. Це пояснюється тим, що магнітний потік, створений струмом обмотки збудження, при всіх навантаженнях залишається сталим Ф — I36 = const, а результуючий магнітний потік із збільшенням навантаження трохи зменшується за рахунок реакції якоря, що веде до збереження швидкості двигуна.
Залежність моменту і струму якоря від навантаження: M і /я =/(Р2). При сталих обертах п = const корисний обертальний момент буде пропорційний корисній потужності і крива M = f(P2) перетвориться в пряму. Із збільшенням навантаження швидкість обертання п зменшується, отже, щоб потужність P3 була так само корисною, обертальний момент M повинен мати більше значення, ніж при п = const. Тому крива M =/(P2) із збільшенням навантаження відхиляється в бік більших значень.
Згідно з формулою (9—5) при Ф = const струм якоря Ія повинен би змінюватись прямо пропорційно моменту, але потік Ф при збільшенні навантаження трохи зменшується внаслідок розмагнічуючої дії реакції якоря. Отже, для створення того самого моменту струм якоря Ія повинен мати більше значення, ніж при Ф = const. Тому крива /я = / (P2) більше вигнута, ніж крива M = / (P2).
Залежність к. к. д. двигуна від P2. К. к. д. дви-
P P
гуна визначається за формулою η = ~ = ^ де рj
повна споживана потужність, а Σρ — сумарні втрати в двигуні.
При холостому ході P2 = 0 і η = 0.
При невеликому, але зростаючому навантаженні сумарні втрати (в основному втрати на тертя) залишаються практично сталими.
р
К- к. д. при цьому зростає, бо чисельник рівняння η = -μ
M
Рис.
9—9.
Механічні
характеристики: —
двигуна з паралельним збудженням; б·
двигуна
з послідовним збудженням.


Механічна характеристика. Механічна характеристика о двигуна з паралельним збудженням являє собою залежність п = f(M) при U = const I36 = const і Rpea = 0. Ураховуючи (9—5) і (9—14) і зробивши невеликі перетворення, дістанемо рівняння залежності швидкості обертання від моменту:
U
Ce
ф
U
п
=
Ce
Ф
*,хя
Ce
Ф
Cm
Ф
СЛФ
C2M.
(9 — 15)
M
=
C1
СеСмФ2





На рис. 9—9, а зображено механічну характеристику двигуна паралельного збудження (при цьому нехтують реакцією якоря).
Властивість двигуна з паралельним збудженням — зберігати майже незмінною швидкість обертання при значних змінах навантаження— широко використовується на практиці.
Характеристики двигуна з послідовним збудженням.
Робочі характеристики двигуна з послідовним збудженням аналогічні до тих самих залежностей для двигуна з паралельним збудженням, а саме: η, М, Ія і η = / (P2) при U = Uh = const або п, M І I)' = /(/я) при Uh = const.
Швидкісна характеристика п = /(P2), або п = f (/я), при U = = Uh = const (рис. 9—8,6).
Зауважимо, що істотної різниці між характеристиками п = = f (P2) і п = f (Ія) немає, тому що при U = const P2 = /я-
У двигуні з послідовним збудженням струм збудження є водночас і струмом навантаження І = Ія = Із6, тому двигун не має характеристики холостого ходу п = f(I36). Магнітний потік двигуна з послідовним збудженням залежить від навантаження. При збільшенні навантаження двигуна в перший момент порушується рівновага обертального і гальмівного моментів. Оберти вала почнуть зменшуватись, що приведе до збільшення струму якоря /я
і обертального моменту М, який зростатиме доти, поки не зрівняється з гальмівним моментом.
Таким чином, швидкість обертання двигуна із збільшенням навантаження зменшується. Якщо нехтувати спадом напруги в колі якоря та реакцією якоря і вважати, що магнітна система двигуна не насичена, то магнітний потік буде пропорційний струму
якоря Ф = Ія. Число обертів можна зобразити таким співвідно-
U const шенням: п = —т- = —:— .
сеФ Ія
Це співвідношення показує, що із збільшенням навантаження швидкісна характеристика п = /(/я), або п = /(P2)1 матиме вигляд гіперболи (рис. 9—8, б). З кривої видно, що при зменшенні навантаження до нуля швидкість обертання безмежно збільшується. Насправді це не так, бо при холостому ході струм у якорі не дорівнюватиме нулю. Тому швидкість обертання двигуна при холостому ході хоч і не дорівнюватиме безмежності, проте значно перевищуватиме номінальну швидкість (у 4—6 раз), що з механічних міркувань недопустимо для двигуна (розрив бандажів, псування обмотки якоря тощо). Ось чому двигун послідовного збудження слід ставити в такі умови, при яких холостий хід двигуна був би неможливим.
Залежність моменту двигуна від P2. При ненасиченій магнітній системі можна вважати, що магнітний потік прямо пропорційний струму Φ ξξξ І, Тоді з формули (9—5) маємо:
Мем = смІя.
Отже, момент двигуна змінюється пропорційно квадрату струму, тому крива Мем = Z(P2) має вигляд параболи (рис. 9—8,6). Але в міру збільшення струму якоря при збільшенні навантаження P2 настає насичення магнітної системи машини. Тому Ф ^ const і крива обертального моменту наближається до прямої лінії.
Залежність к. к. д. двигуна від P2. Залежність к. к. д. двигуна з послідовним збудженням від навантаження має характер, аналогічний до такої Самої залежності двигуна паралельного збудження.
Механічна характеристика. Як було вже зазначено, у двигунів з послідовним збудженням струм збудження дорівнює струму навантаження:
= L б = /я.
Для ненасиченої машини основний магнітний потік Ф пропорційний струму якоря Ф = &ф/я. Ураховуючи це, електромагнітний момент Мем можна зобразити такою формулою:
Мем = ^ Ф2, кф
звідки
Me
Cm
III.
Характеристики
двигуна з мішаним збудженням.
Робочі
характеристики двигуна з мішаним
збудженням є проміжними між
характеристиками двигунів паралельного
і послідовного збудження (рис. 9—10).
Ураховуючи
(9—17),
число
обертів двигуна п
можна подати таким
рівнянням:
U
іЛ
1A
СеФ
'
п
—
9—5.
КОЛЕКТОРНІ
ДВИГУНИ ЗМІННОГО СТРУМУ
Двигуни
постійного струму можуть працювати і
на змінному струмі. Обертальний момент
створюватиметься так само, як і в
машинах постійного струму, від
взаємодії струму в якорі з магнітним
потоком індуктора Ф, тому що напрям
струму змінюється одночасно і в
якорі, і в індукторі. Але в такому
двигуні в сталі індуктора були б надто
великі втрати енергії на вихрові струми
і гістерезис. З цієї причини і к. к. д.
двигуна був би дуже низьким.
Для
того щоб колекторні машини працювали
на змінному струмі, конструктивно їх
значно ускладнюють, а саме: сердечник
індуктора виготовляють з окремих
листів електротехнічної сталі, а в
якорі закладають допоміжну обмотку,
яка поліпшує умови комутації і
зменшує іскріння під щітками.
Хоч
колекторні машини змінного струму і
складніші та дорожчі, ніж машини
постійного струму тієї самої потужності,
проте вони мають велику перевагу перед
асинхронними двигунами (дають можливість
у широких межах плавно регулювати
швидкості обертання). Наша промисловість
випускає колекторні двигуни змінного
струму з послідовним і паралельним
сполученням обмоток якоря та індуктора.
Ix
характеристики
досить близькі до характеристик
відповідних двигунів постійного
струму.
М,п
(9-18)
Рис.
9—10.
Робочі
характеристики двигуна з мішаним
збудженням.
(М2
+ М0)
Ce
Рівняння
(9—18)
є
механічною характеристикою двигуна
послідовного збудження, яка зображена
на рис. 9—9,
б.










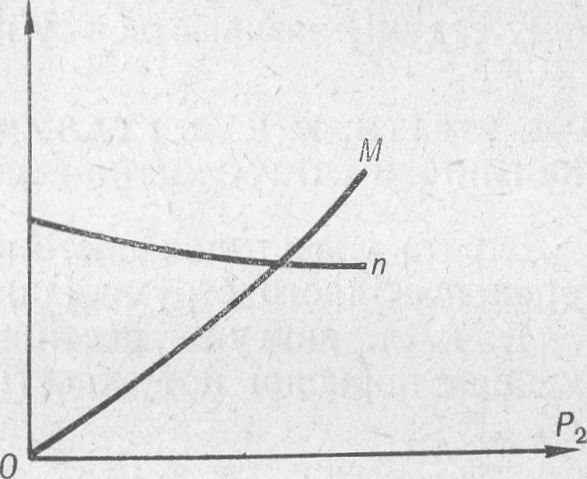
Однофазні двигуни з послідовним сполученням обмоток застосовуються на електрифікованих залізницях, де їх живлення здій-
2
снюється струмом зниженої частоти (25 і 16у періодів за секунду),
що поліпшує умови їх роботи. Двигуни малої потужності знайшли застосування в побутових приладах і автоматиці. Колекторні двигуни малої потужності, які працюють і на змінному, і на постійному струмі, називаються універсальними.
6. Bi рати, к. К. Д. І галузь застосування двигунів постійного струму
Втрати у двигунах постійного струму такі самі, як і в генераторах постійного струму (див. § 8—9).
К. к. д. двигунів постійного струму можна зобразити відношенням корисної потужності до всієї витраченої:
![]()
де
Y1P
=
Pm
+ Pcm
+ Рмех
—
загальні втрати в двигуні.
Величина номінального к. к. д. в сучасних двигунах коливається в межах від 75% (для машин порівняно малої потужності) до 96% (для машин великої потужності).
З двигунів постійного струму найбільш поширені серієсні двигуни (з послідовним збудженням). Вони мають великий пусковий момент, пропорційний квадрату струму. Швидкість обертання цих двигунів легко регулюється в широких межах. Це дало можливість застосувати двигун з послідовним збудженням як основний тяговий двигун на приміських і магістральних електрифікованих залізницях, у метро, на заводському і шахтному електротранспорті, у трамваях тощо.
Двигуни з мішаним збудженням застосовуються в тролейбусах і на електрифікованих залізницях, а також у потужних прокатних станах, у текстильній промисловості, де потрібне плавне регулювання швидкості обертання в широких межах.
Електромашинобудівні заводи нашої країни випускають багато типів машин постійного струму (відкритих, захищених, вибухобез- печних та ін.), розрахованих за потужністю від 0,25 до 10 000 кет і напругою від 150 б до 1500 в.
Розділ X ВИПРЯМЛЯЧІ
1. Напівпровідникові вентилі
У природі є дуже багато речовин, які за їх електропровідністю не можна віднести ні до провідників, ні до діелектриків. Ці речовини проводять електричний струм, але значно гірше, ніж провідники. Тому їх називають напівпровідниками. До напівпровідників належать майже всі окисли металів (Cu2O, Al2O3, Fe2O3,...), сульфіди (PbS, Cu2S,...), а також деякі чисті хімічні елементи, наприклад кремній (Si), германій (Ge), селен (Se) та ін. У техніці найбільше поширилися германій, кремній, селен, закис міді та ін.
Характерною особливістю напівпровідників є те, що при підвищенні температури їх опір зменшується і, отже, збільшується електропровідність, тоді як у провідників при цій умові опір зростає. У напівпровідників зменшується електричний опір під дією світла (внутрішній фотоефект). Існує цілий ряд інших властивостей напівпровідників, завдяки яким вони широко застосовуються в автоматиці і в пристроях контролю та вимірювань.
У напівпровідників розрізняють власнуі домі ш к о в у провідність. Домішкова провідність буває «-типу і р-типу.
Для пояснення власної провідності напівпровідника розглянемо плоску схему кристалічної решітки кремнію. На зовнішній орбіті кожного атома кремнію є 4 валентних електрони (кремній розміщений у 4-й групі періодичної системи елементів Д. І. Менделєєва). У решітці кремнію кожний атом оточений чотирма найближчими сусідами. Зв’язок двох сусідніх атомів зумовлений парою електронів, що утворюють так званий парно-електронний, або ковалентний зв’язок (рис. 10—1).
При підвищенні температури кристала частина електронів може набути енергії, достатньої для роз-
риву зв’язків із своїми атомами. Такі електрони стають вільними, а на їх місці залишаються незаповнені місця, так звані дірки. Кількість вільних електронів завжди дорівнює кількості утворених дірок.
Під впливом прикладеної до кристала різниці потенціалів вільні електрони рухаються проти поля і утворюють електричний струм.
Рис.
10—1.
Схема
парно-електронних зв’язків у кристалі
кремнію.
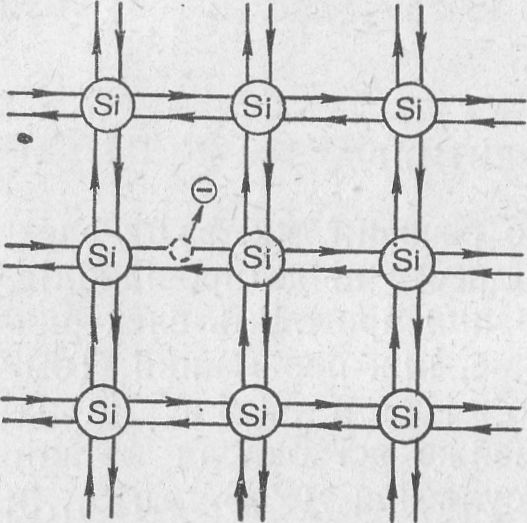
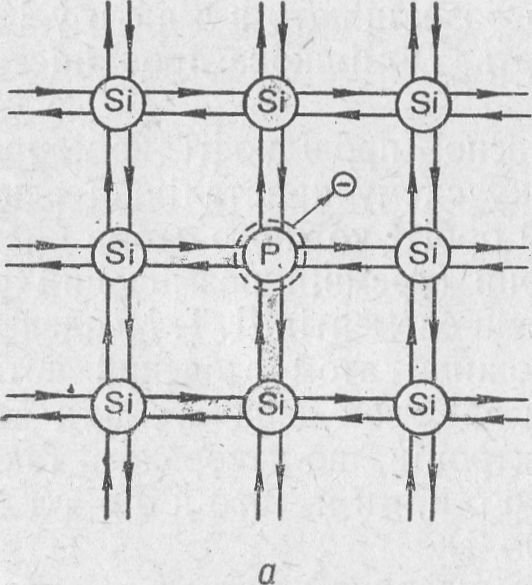 Отже,
у чистому напівпровіднику провідність
створюється як вільними електронами,
так і електронами зв’язку. Така
провідність дістала назву власної
провідності
напівпровідників. На величину
провідності напівпровідників великий
вплив мають домішки,завдяки яким
створюється так звана до мішкова
провідність.
Якщо в кристалі кремнію деякі атоми в
кристалічній решітці будуть замінені
атомами п’ятивалентного елемента,
наприклад фосфору (рис. 10—2,
а),
то чотири електрони фосфору братимуть
участь у ковалентних зв’язках із
сусідніми атомами кремнію, а п’ятий
при досить низькій температурі буде
зв’язаний лише з атомом фосфору. Але
цей зв’язок буде досить слабкий, тому
вже при незначних підвищеннях температури
енергія електрона
Отже,
у чистому напівпровіднику провідність
створюється як вільними електронами,
так і електронами зв’язку. Така
провідність дістала назву власної
провідності
напівпровідників. На величину
провідності напівпровідників великий
вплив мають домішки,завдяки яким
створюється так звана до мішкова
провідність.
Якщо в кристалі кремнію деякі атоми в
кристалічній решітці будуть замінені
атомами п’ятивалентного елемента,
наприклад фосфору (рис. 10—2,
а),
то чотири електрони фосфору братимуть
участь у ковалентних зв’язках із
сусідніми атомами кремнію, а п’ятий
при досить низькій температурі буде
зв’язаний лише з атомом фосфору. Але
цей зв’язок буде досить слабкий, тому
вже при незначних підвищеннях температури
енергія електрона
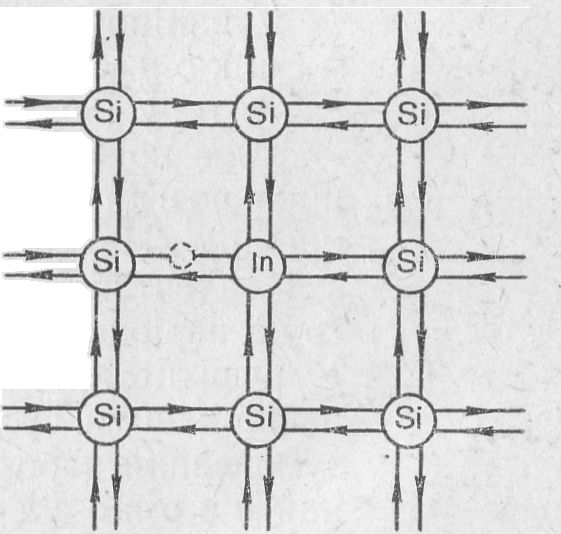
Рис. 10—2. Атоми фосфору (а) і Індію (б) в кристалічній решітці кремнію.
стає достатньою для розриву його зв’язків з атомом. Електрон стає вільним носієм заряду, але дірка на його місці не утворюється. Такі напівпровідники мають електронну провідність, або провідність /г-типу (negativ — негативний). При значному підвищенні температури частина ковалентних зв’язків між атомами розриватиметься, утворюватимуться пари електрон-провідності — дірка, тобто напівпровідник матиме вже й власну провідність. Але в напівпровіднику η-типу кількість електронів завжди перевищуватиме кількість дірок.
Якщо в напівпровідник ввести атом тривалентного елемента, наприклад індію (рис. 10—2, б), то утворюється напівпровідник з дірчастою електропровідністю, або р-типу (positiV — позитивний). Атом індію має на зовнішній орбіті три
|
P |
|
|
п |
|
J0 |
© |
©- |
-© |
© |
0I |
• |
© |
|
-© |
© |
© |
1® |
© |
©- |
-© |
© |
* |
|
P |
п |
|
І © |
© і - |
+1 © |
el |
Г |
© І - І |
+ І © |
0 |
L |
І © І - І |
І + І © L_i„. |
of |
Рис. 10—3. Схема утворення запірного шару:
а — початок дифузії зарядів; б — запірний шар.
валентних електрони. Усі вони братимуть участь у створенні ковалентних зв’язків між атомами. Але оскільки індій має три валентних електрони, то один зв’язок залишається незайнятим. Виникає дірка. Якщо до такого кристала прикласти різницю потенціалів, то в ньому виникне струм. Носіями заряду в цьому випадку будуть електрони зв’язку, хоч створюється враження, ніби рухаються позитивні заряди-дірки.
Напівпровідникові випрямлячі утворюють систему, яка складається з контактуючих між собою шарів напівпровідника і металів або двох напівпровідників, один з яких — з електронною провідністю /г-типу, а другий — з дірковою провідністю p-типу (рис. 10—3).
При контакті внаслідок дифузії деяка кількість вільних електронів з /z-частини перейде в p-частину, де є незайняті валентні рівні (дірки). Електрони займуть частину цих рівнів поблизу контакту. Дірки в свою чергу дифундуватимуть з p-частини в «-частину, де відбуватиметься їх рекомбінація із вільними електронами. Таким чином, концентрація вільних електронів і дірок поблизу контакту дуже зменшиться. Отже, опір цієї частини напівпровідника буде великим. Крім того, /г-частина поблизу контактної області зарядиться позитивно, бо вона втратила частину своїх вільних електронів, а p-частина зарядиться негативно. Електричне поле, яке при цьому виникає, перешкоджає дальшій дифузії вільних електронів і дірок,
установлюється динамічна рівновага. Цей шар дістав назву з а- пірного шару або р-/г-переходу.
Якщо до р-я-переходу прикласти різницю потенціалів так, щоб на p-частину подати позитивний потенціал (рис. 10—4, а), а на «-частину — негативний, то під дією зовнішнього поля вільні носії заряду рухатимуться до р-я-переходу, концентрація їх на переході зростає і через напівпровідник піде значний струм.
P |
|
п |
І ©— |
Sbi |
І |
І |
(?)—1~ І |
4—© -*-0 В |
©— |
|
-J—Θ —Θ J |
P |
п |
І —©—©І |
і Θ— Θ— І |
І © ——© І |
! ©~ ©~ І |
—© —© І |
j©—©~[ |
а б
Рис. 10—4. Пряме (а) і зворотне (б) вмикання напівпровідникового вентиля.
Цей струм називається прямим струмом, а напруга, яка спричинює виникнення цього струму,— прямою напругою.
Якщо різницю потенціалів прикласти в протилежному напрямі (рис. 10—4,6), то ширина p-я-переходу зростає, бо носії заряду
ма
Рис.
10—5.
Вольтамперна
характеристика напівпровідникового
вентиля.
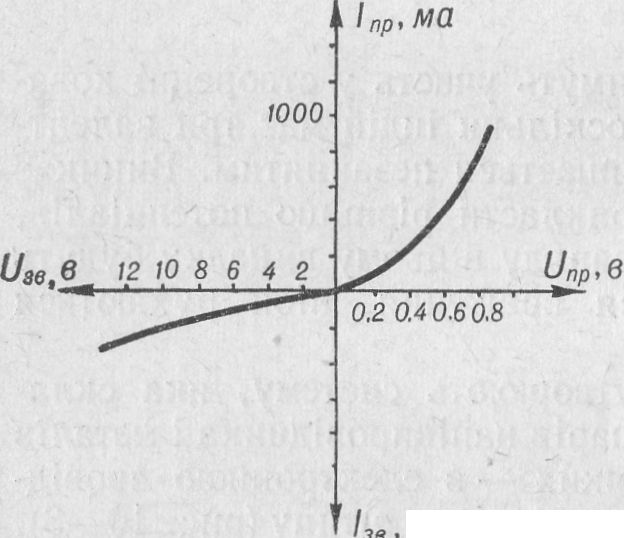
K = при
Unp — U3Qop нази-
звор
вається коефіцієнтом випрямляння.
Отже, прилади, в яких створено р-я-перехід, пропускають струм практично тільки в прямому напрямі, тому їх застосовують для випрямляння змінного струму в електро- і радіотехніці, а сам прилад називають вентилем.
Залежність прямого і зворотного струмів вентиля від напруги, прикладеної до його електродів, називають вольтамперною характеристикою вентиля (рис. 10—5). Чим крутіша крива прямого струму, тим вища якість випрямляча.
Усі напівпровідникові вентилі поділяються на точкові і площинні. Через площинний вентиль можна пропускати значно більший електричний струм, ніж через точковий. Тому для випрямляння змін
ного струму технічної частоти (50 гц) застосовують площинні вентилі. Точкові вентилі застосовують у різних радіотехнічних схемах, де мають справу з високочастотними електричними коливаннями і малими струмами. Найбільш поширені в сучасній практиці селенові і міднозакисні (купроксні) вентилі, але за останнє десятиріччя більш перспективними виявилися германієві і кремнієві вентилі. Елемент міднозакисного вентиля (рис. 10—6, а) складається з мідного диска 1, шару закису міді з запірним шаром 2, свинцевого диска З для кращого контакту, мідного диска-радіатора 4 для відведення тепла, болта 5 і ізолюючої втулки 6.
Внаслідок термічної обробки внутрішній шар закису міді, який лежить ближче до мідної пластинки, насичується атомами міді (рис. 10—6, б) і матиме електронну провідність я-типу, а зовнішній шар, збагачений киснем,— діркову провідність p-типу. Отже, шар закису міді містить два напівпровідникові шари з різними типами провідності. Між цими шарами всередині закису міді виникає запірний шар з односторонньою провідністю (р-п-перехід).
Електричні властивості міднозакисного вентиля залежать від його температури. Так, при 50° C вентиль втрачає властивості односторонньої провідності; при — 30° C він практично припиняє пропускати струм у прямому напрямі.
Основними параметрами міднозакисних вентилів є: допустима густина прямого струму 20—35 ма/см2, а при штучному охолодженні 100—150 ма/см2; допустима зворотна напруга — не більше 10—
в. Для збільшення потужності елементи вентиля сполучають послідовно і паралельно.
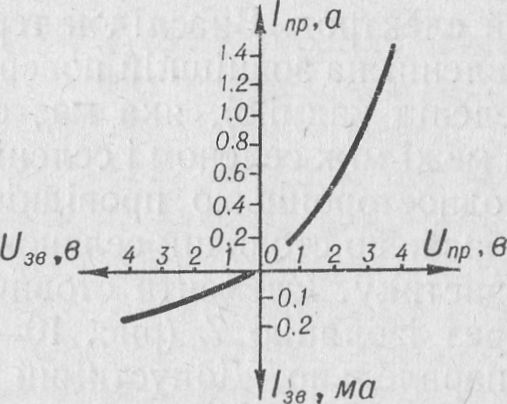 Купроксні
вентилі скорочено позначають BK (вентиль
купрокс- ний) з наступною цифрою, яка
показує діаметр шайби вентильного
елемента в мм.
Наприклад. BK—20—8
(цифра
8
визначає
модель
Купроксні
вентилі скорочено позначають BK (вентиль
купрокс- ний) з наступною цифрою, яка
показує діаметр шайби вентильного
елемента в мм.
Наприклад. BK—20—8
(цифра
8
визначає
модель
Рис.
10—6.
Схема
будови (а), утворення запірного шару
(б) і вольтамперна характеристика («)
міднозакисного вентиля.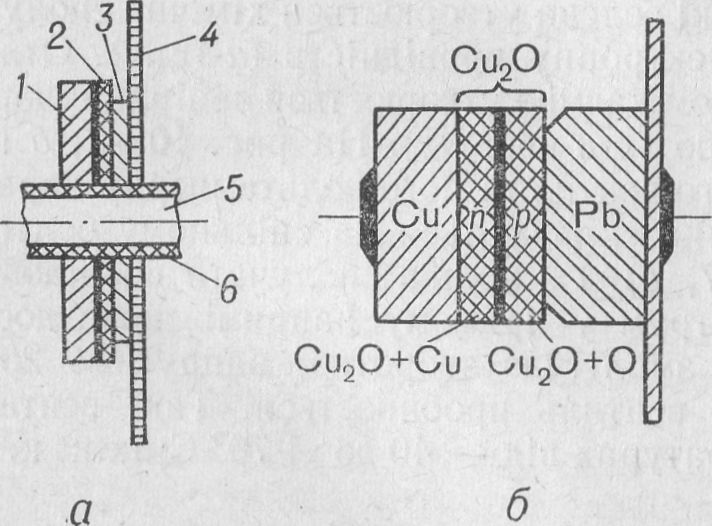
або партію при серійному виробництві). К. к. д. міднозакисного вентиля дорівнює 50—70%.
Елемент селенового вентиля (рис. 10—7, а) складається з залізного або алюмінієвого диска 1 товщиною 0,5—1,5 мм, покритого з одного боку шаром селену 2, який має діркову провідність (р-типу) і є одним з електродів, та шару сплава олова, кадмію і вісмуту 4, нанесеного на селен, до якого прилягає пружинна шайба 5 — дру
в
Іηρ,
MO
Unp,
в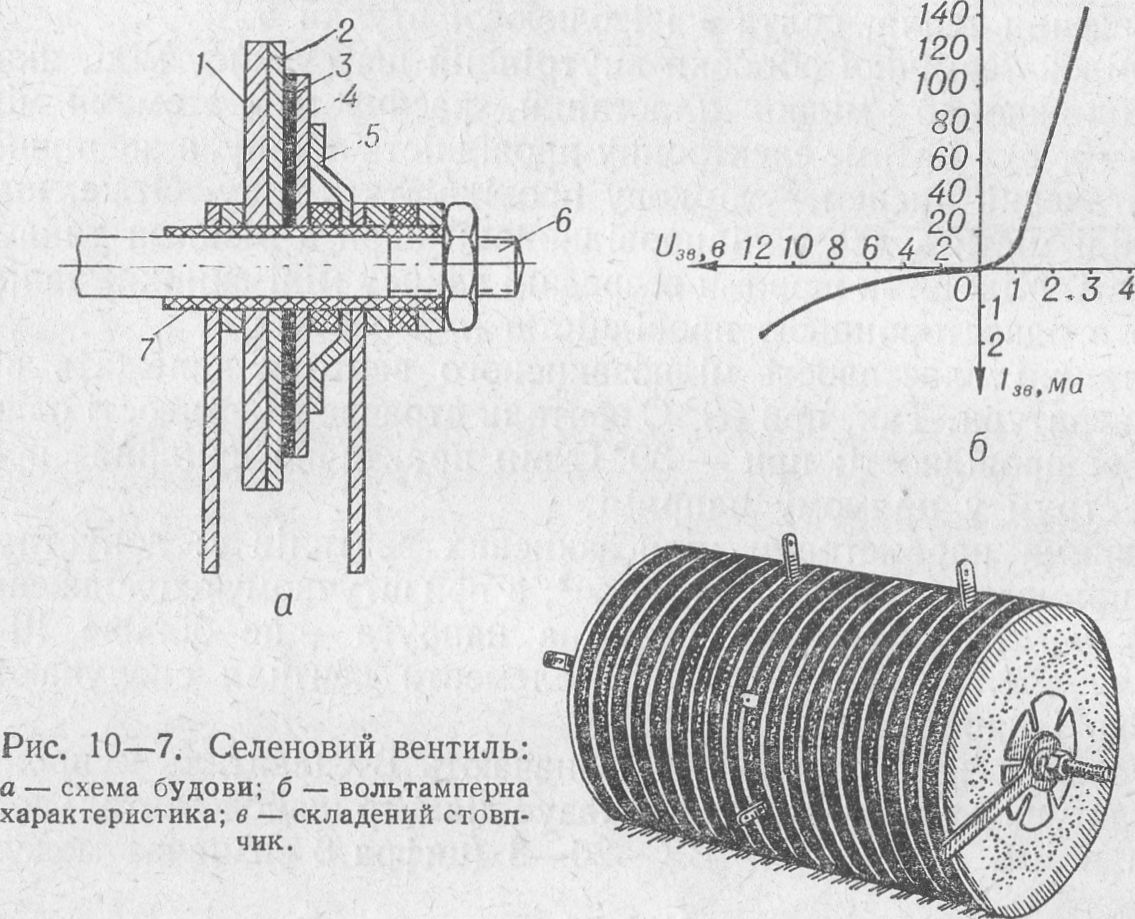
гий електрод. Внаслідок термічної обробки вентиля при його виготовленні на зовнішній поверхні селена утворюється хімічна сполука (селенід кадмію), яка має електронну провідність («-типу). Отже, на межі між селеном і селенідом кадмію утворюється запірний шар З з односторонньою провідністю (^-«-перехід). На рис. 10—7, б і в зображено стовпчик селенового вентиля і його вольтамперну характеристику. Елементи стовпчика складаються на спільному болті 6 через ізоляцію 7 (рис. 10—7, а). їх можна сполучати послідовно і паралельно. Допустимий струм у прямому напрямі може досягати 0,5 а!CM2, а допустима амплітуда зворотної напруги — 20— 25 в. При напрузі 50—80 в вентиль пробивається. Такі вентилі використовуються при температурах від — 40 до +70° С; їх к. к. д. доходить до 70—90%.
Селенові вентилі маркірують так само, як і купроксні, наприклад: BC—25—55 або ABC—25—55 (буква А показує, що підкладку випрямляча, на яку нанесено шар селену, виготовлено з алюмінію).
Останніми роками створено нові типи напівпровідникових вентилів: германієві і кремнієві з вищими технічними характеристиками.
Германієві вентилі виготовляють з чистого германію з домішками однієї десятимільйонної частини сурми або миш’яку, що надає кристалу германію електронної провідності (л-типу). У виготовлену з нього пластинку (завтовшки 1 мм) з одного боку вплавляють індій,
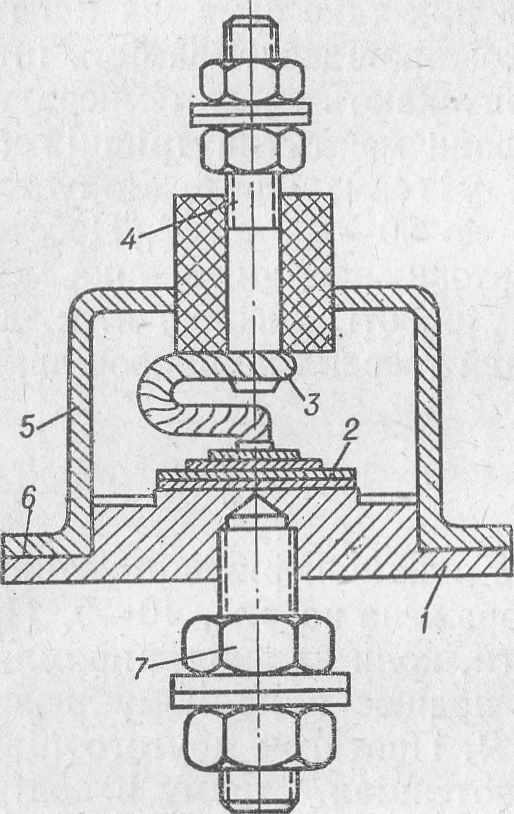 який
надає цій стороні пластинки діркову
провідність (р-типу). На межі цих двох
напівпровідників з різною провідністю
створюється запірний шар з
односторонньою провідністю
(р-п-перехід).
який
надає цій стороні пластинки діркову
провідність (р-типу). На межі цих двох
напівпровідників з різною провідністю
створюється запірний шар з
односторонньою провідністю
(р-п-перехід).
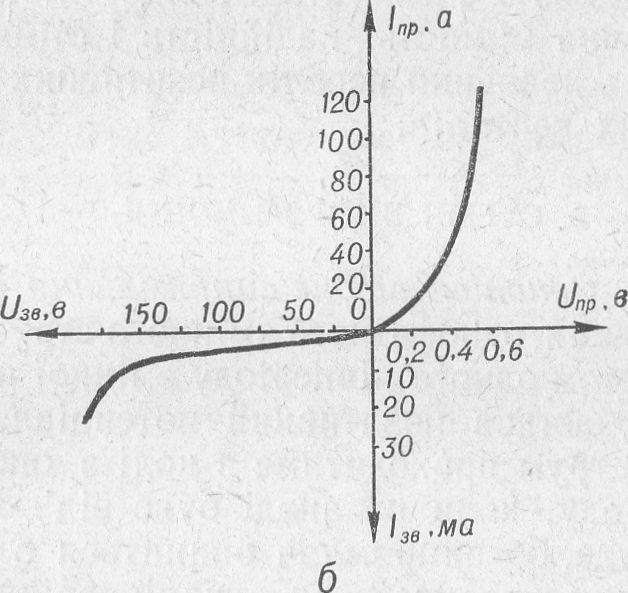
Рис. 10—8. Германієвий вентиль: а — конструктивна схема; б — Еольтамперна характеристика.
На рис. 10—8, а зображена конструктивна схема германієвого площинного вентиля. Вентильний елемент 2 з р-п-переходом припаюють до основи 1, яка має затискач 7. Верхню сторону переходу для кращого контакту покривають оловом і через гнучкий провідник 3 приєднують до верхнього затискача 4. Для захисту випрямляючої пластинки від вологи і пилу її поміщають у металевий кожух 5. Між кожухом і основою для ущільнення ставлять прокладку 6. На рис. 10—8,6 зображена вольтамперна характеристика германієвого вентиля. Внутрішній спад напруги цього вентиля дуже малий (близько 0,5 в при струмі 100 а). Це забезпечує дуже високий к. к. д. вентиля — 97—98%.
Допустима густина струму для германієвих вентилів майже в тисячу раз більша, ніж для селенових, а геометричні розміри набагато менші. Наприклад, випрямляльний елемент вентиля на струм 200 а має діаметр всього 30 мм і товщину 0,8 мм. Германієві вентилі на 10 і 50 а, що випускаються в СРСР, виготовляють з пові
тряним охолодженням, а на 200 а — з водяним. Допустима температура нагріву не повинна перевищувати 75° С.
Потужні випрямляючі установки виконують з паралельним і послідовним сполученням окремих випрямляльних елементів. Тепер вже працюють германієві випрямляльні установки потужністю в кілька десятків тисяч кіловат.
Кремнієві вентилі конструктивно майже не відрізняються від германієвих. Створення р-п-переходу в них таке саме, як і в германієвих, тільки для створення діркової провідності замість індію беруть алюміній. Кремнієві вентилі допускають вищу температуру нагрівання вентиля — до 200° С, але вони мають внутрішній спад напруги в 1,5—2 рази більший, ніж у германієвих. Допустима питома густина струму дуже висока — до 50—100 а/CMi. Простота будови і експлуатації, відсутність обертових частин, велика механічна міцність, надійність і стійкість у роботі, високий к. к. д.— ось неповний перелік позитивних якостей твердих напівпровідникових вентилів.
2. СХЕМИ ВИПРЯМЛЯННЯ
Однопівперіодне випрямляння. Схема однопівперіодного випрямляння однофазного змінного струму зображена на рис. 10—9. Протягом одного півперіоду змінної напруги, коли на анод випрямляча подається позитивний потенціал, він працює в прямому режимі і струм проходитиме в колі з опором R. Протягом другого півперіоду, коли на аноді буде від’ємний потенціал, струму в колі не буде, бо випрямляч опиниться в зворотному режимі. Таке випрямляння називається однопівперіодним.
Рис.
10—9.
Схема
однопівперіодного випрямляння (а) і
графіки напруги та
U,
б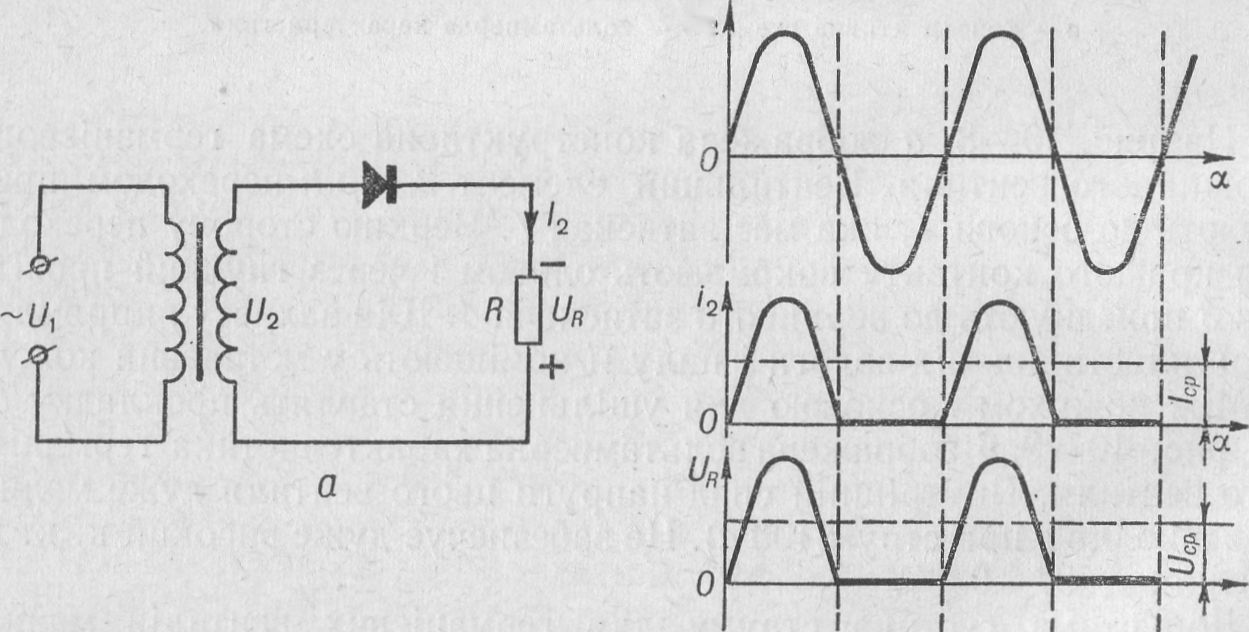
Струму (б).
Пульсуючий струм на опорі R створює спад напруги Ur, який змінюється аналогічно до струму (рис. 10—9, б) і називається в и- прямленою напругою.
Якщо вимірювальні прилади ввімкнути в коло випрямленого струму, то вони показуватимуть середнє значення струму за період, а якщо в коло змінного струму, то — його діюче значення. Позначивши випрямлену напругу і струм через U0, I0 і знехтувавши спадом напруги у випрямлячі, можемо вивести співвідношення між змінними та випрямленими струмами і напругами.
Миттєве значення напруги змінного струму и = Um sin α = = ]/2i/sina. Випрямлена напруга U0 дорівнює середньому значенню його за період:
U0 = ~ f \Ґ2 U sin a. da = ^ί/ = 0,45ί/. (10—1)
о
Вибір границь інтегрування від 0 до п пояснюється тим, що в "другому півперіоді випрямлений струм I0 і спад напруги на опорі R дорівнюють нулю.
Максимальне значення змінного струму
Середнє значення випрямленого струму
![]()
(10-3)
Для однопівперіодного випрямлення з (10—2) і (10—3) маємо:
![]()
(10-4)
о
![]()
(10-5)
Інтегрування знову провадиться в межах (0, —π), оскільки в другому півперіоді / = 0. Підставляючи значення і = /m sin а в в (10—5), дістанемо:
звідки
Порівнявши (10—6) з (10—4), дістанемо співвідношення між випрямленим і діючим значенням змінного струму при однопівперіод- ному випрямлянні:
I0 = -L (10-7)
Пульсуючий струм часто негативно впливає на роботу споживача. Так, наприклад, у репродукторі радіоприймача в цьому разі
Рис.
10—10.
Схема
випрямляча з фільтром (а)
і крива випрямленого струму (б).
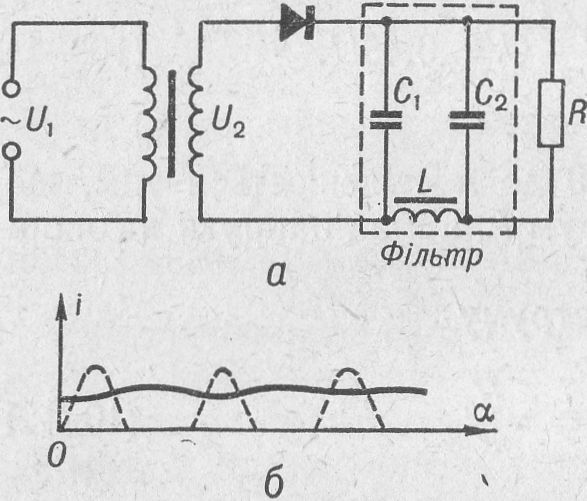
Для згладжування пульсації випрямленого струму застосовують котушки індуктивності і конденсатори, так звані згладжуючі фільтри (рис. 10—10). Котушку індуктивності вмикають звичайно послідовно з споживачем. Вона діє як маховик, що запасає кінетичну енергію при зростанні швидкості і віддає її при спаданні швидкості.
У момент зростання, коли зростає струм, е. р. с. самоіндукції в котушці перешкоджає його зростанню. Навпаки, при зменшенні струму е. р. с. самоіндукції підтримує його, зменшуючи, таким чином, пульсацію.
Конденсатори звичайно вмикають паралельно споживачеві. При зростанні напруги конденсатор запасає енергію і віддає її при зниженні напруги. Внаслідок цього пульсація напруги і струму на споживачі зменшується. Нарис. 10—10, б пунктиром зображена крива зміни струму при однопівперіодному випрямлянні без фільтра а суцільною лінією — з фільтром.
Двопівперіоднг випрямляння. Двопівперіодне випрямляння виконують за допомогою двох випрямлячів (рис. 10—11, а). Живлення їх відбувається від трансформатора з виведеною середньою точкою вторинної обмотки. Протягом півперіоду, коли верхній кінець обмотки трансформатора має позитивний потенціал, струм проходитиме через верхній випрямляч. Через нижній випрямляч у цей час струм не проходить, тому що анод має від’ємний потенціал. Протягом другого півперіоду позитивний потенціал буде на нижньому кінці обмотки і струм проходитиме через нижній випрямляч. Легко побачити, що через споживач R струм протягом обох півперіодів
проходитиме в одному напрямі. На рис. 10—11, б зображено криву випрямленого струму при двопівперіодному випрямлянні.
(10-8)
Uo = 0,9U·, I0 = ~І.
Крім того, струм I0, що проходить через споживач, буде вдвоє більший від струмів, що проходять через кожний випрямляч.
_
Я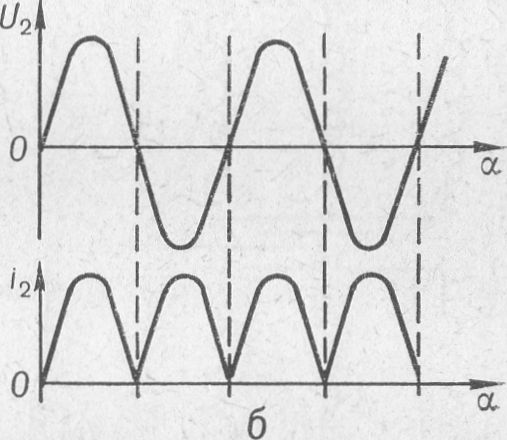

+ J2
Рис. 10—.11. Схема двопівперіодного випрямляння (а) і крива випрямленого струму без фільтра (б).
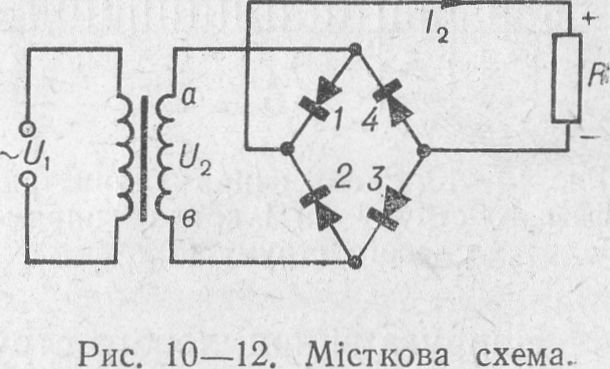 Місткова
схема.
Двопівперіодне випрямляння можна
виконати також за допомогою містковоїсхеми
(рис. 10—12).
У
першому пів- періоді, коли затискач а
вторинної обмотки трансформатора
матиме позитивний потенціал, струм
піде з точки а
через випрямляч 1
(випрямляч
4
замкнений),
навантаження R,
випрямляч
3
до
затискача в
обмотки трансформатора, а в другому
півперіоді — від точки в
через випрямляч 2
(випрямляч
З
замкнений),
навантаження R,
випрямляч
4
до
затискача а.
Місткова
схема.
Двопівперіодне випрямляння можна
виконати також за допомогою містковоїсхеми
(рис. 10—12).
У
першому пів- періоді, коли затискач а
вторинної обмотки трансформатора
матиме позитивний потенціал, струм
піде з точки а
через випрямляч 1
(випрямляч
4
замкнений),
навантаження R,
випрямляч
3
до
затискача в
обмотки трансформатора, а в другому
півперіоді — від точки в
через випрямляч 2
(випрямляч
З
замкнений),
навантаження R,
випрямляч
4
до
затискача а.
Співвідношення струмів і напруг таке саме, як і в попередньому випадку.
Випрямляння трифазного струму. На рис. 10—13, а зображено
схему випрямляння трифазного струму. Вторинна обмотка трансформатора сполучена зіркою. До нульової точки приєднують один затискач споживача R. У кожну фазу обмотки ввімкнено випрямляч, катоди якого становлять одну спільну точку, до якої приєднується другий затискач споживача R.
У кожний момент часу працює тільки один випрямляч, а саме той, на якому найбільший позитивний потенціал (рис. 10—13, б). У точці 1 позитивна напруга у фазі А стає більшою, ніж у фазі С; випрямляч у фазі C припиняє роботу, а починає працювати випрямляч фази А. У точці 2 його замінює випрямляч фази В і т.д. Отже, кожна фаза вторинної обмотки трансформатора і ввімкнений у неї випрямляч працюють протягом V3 періоду. Випрямлений струм майже не має пульсації.
(
У
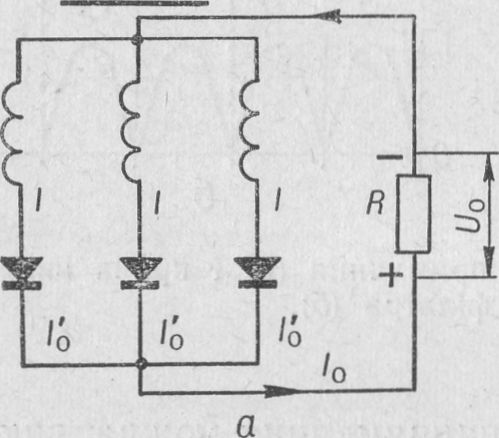 і
і
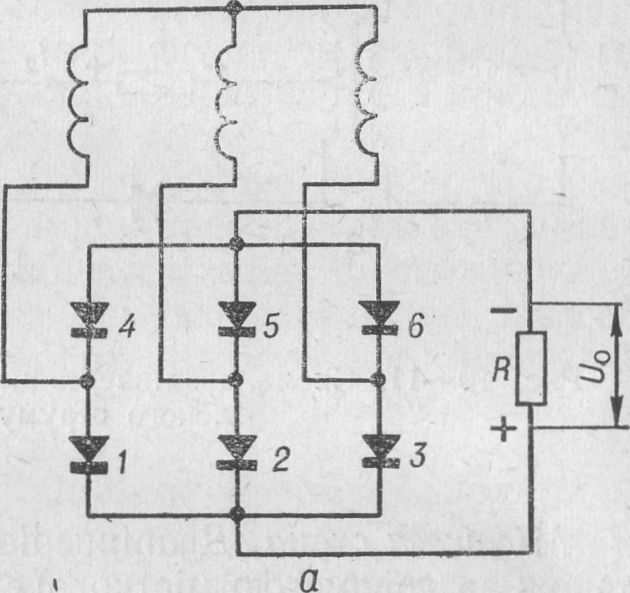
O
Рис.
10—13.
Схема
випрямляння трифазного струму (а)
і крива випрямленого струму (б).
Рис.
10—14.
Місткова
схема випрямляння трифазного струму
(а)
і
крива випрямленого струму (б).
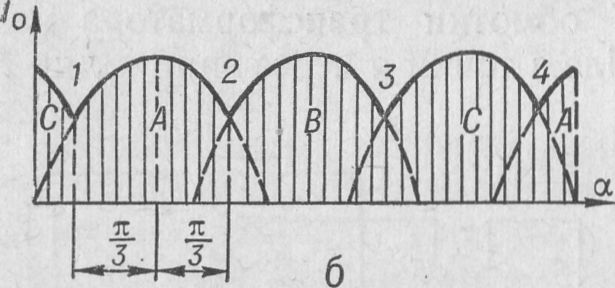
Напруга випрямленого струму U0 визначається як середнє значення на відрізку 2π/3 (1—2, 2—З і т. ін.). Початок відрізка відповідає куту 30° від початкової точки півсинусоїди, а кінець — куту 150°. Таким чином,
150° 150°
~
2π/3
I
Um
sin a
da
= -
^
U
j sin
а
da
= 1,17(/.
30° 30°
де U — діюче значення фазної напруги.
Співвідношення між випрямленим струмом I0 і діючим струмом І легко знайдемо, якщо знехтувати незначною пульсацією випрямленого струму, тобто вважати, що Z0^ const. При цій умові миттєве значення змінного струму протягом 1/3 періоду дорівнюватиме I0. Тоді
150° 150° 2 2
12 = 2?. J i^da = 2π j iOdci = 2i Х T = "з ’
30° 30°
звідки
I0 = Уз І. (10-10)
Струм у кожному випрямлячі буде в три рази менший за миттєве значення змінного струму
/;=4°, (ίο-п)
де I0- випрямлений струм у фазі.
Місткова схема. Для випрямляння трифазного змінного струму широко використовується місткова схема (рис. 10—14, а). Випрямлячі 1, 2,3 працюють аналогічно до випрямлячів попередньої схеми (10—13). Коло випрямленого струму замикається після навантаження R послідовно через випрямлячі 4, 5, 6. Так, якщо працює випрямляч 1, то першу половину робочої третини періоду його коло замикається через випрямляч 5, а другу — через випрямляч 6. При цьому дуга кривої випрямленого струму за цей час поділяється на дві самостійні частини. Частота пульсацій зростає в два рази, а амплітуда помітно зменшується (рис. 10—14, б).
3. ЕЛЕКТРОННІ TA ІОННІ ВИПРЯМЛЯЧІ
На явищі термоелектронної емісії грунтується робота електронних і іонних випрямлячів. Енергія, яка витрачається на вихід електрона з металу, називається роботою виходу. Робота виходу буде різною для різних металів. Практично емісія починається при температурі порядку 1500—2000° K-
Конструктивно електронний або іонний випрямляч являє собою скляний або металевий балон, в якому створюється певний вакуум (в електронних 10~6—IO-7 мм рт. ст., в іонних IO-2 — —IO-3 мм рт. ст.). Усередині балона розміщені два металеві електроди — катод K і анод А (рис. 10—15). Оскільки вакуум не
€ провідником, то потрібні для електропровідності лампи електрони дістають, розжарюючи катод. Розжарюють його постійним струмом від батареї розжарювання або змінним струмом від трансформатора малої напруги (до 6 в). Катод звичайно виготовляють з вольфраму, який має високу роботу виходу; тому для створення значної емісії треба розжарювати катод до високих темпера/ тур (2200°—2500°С).
Рис.
10
•електронного
прямляча.

Крім розглянутих катодів прямого розжарювання, застосовуються катоди непрямого розжарювання, в яких вольфрамова нитка вміщена всередину циліндра (катода). Вольфрамова нитка електрично ізольована від циліндра і призначена для нагрівання катода до потрібної температури. Перевагою такої конструкції є те, що розжарювати катод можна змінним струмом без помітної пульсації емісії.
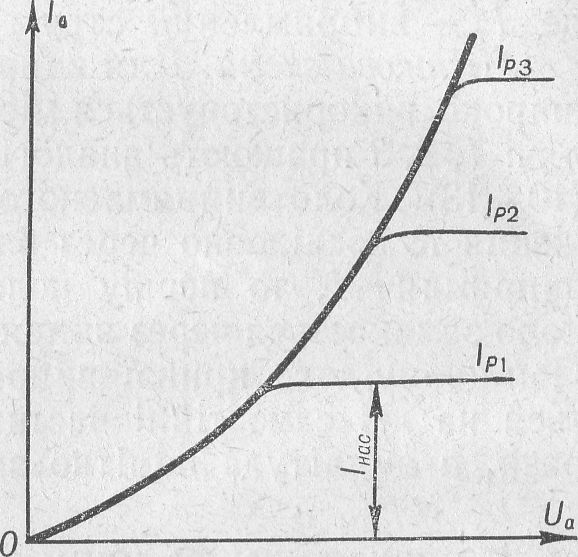 Матеріалом
для анода є нікель, молібден або тантал,
які мають велику роботу виходу. Це
потрібно для того, щоб електрони катода
не могли вибивати вторинних електронів
з анода, бо це призвело б до зменшення
струму в анодному колі.
Матеріалом
для анода є нікель, молібден або тантал,
які мають велику роботу виходу. Це
потрібно для того, щоб електрони катода
не могли вибивати вторинних електронів
з анода, бо це призвело б до зменшення
струму в анодному колі.
Рис.
10—16.
Залежність
анодного струму від анодної напруги
при різних значеннях струму розжарювання.
Електрони, які покинули катод, не всі доходять до анода, частина з них повертається знову до катода. Це пояснюється тим, що електрони біля катода створюють об’ємний негативний заряд, який протидіє вильоту електронів з катода і переміщенню їх до анода.
Збільшуючи анодну напругу (між катодом і анодом), матимемо
збільшення струму до певної межі, яка називається струмом насичення Інас (рис. 10—16). Дальше підвищення анодної напруги не приводить до збільшення струму. При струмі насичення число електронів, які вилітають з катода за одиницю часу, дорівнює числу електронів, що надходять до анода.
Збільшення анодного струму при певній анодній напрузі досягають підвищенням температури катода, збільшуючи струм розжарювання Ip.
ІЛ
А
А,
Рис.
10—18.
Однопівперіодне
випрямляння змінного струму
кенотроном*.
а
— схема; б — графік випрямленого струму.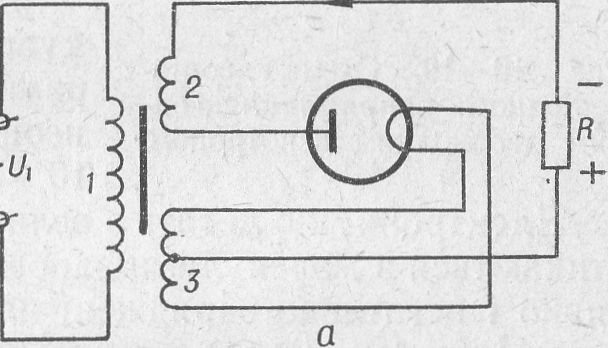


Рис.
10—17.
Кенотрон:
1
—
балон; 2
—
катод; З
— анод; 4
—
цоколь; 5
—
ніжки цоколя.
Таким чином, електронна лампа має односторонню провідність Цією властивістю двоелектродної лампи — кенотрона (рис. 10—17) широко користуються для випрямляння змінного струму.
Схема однопівперіодного випрямляння змінного струму за допомогою кенотрона зображена на рис. 10—18. Уся система живиться від трансформатора. Первинна обмотка 1 увімкнена в мережу змінного струму. Обмотка 2 живить анодне коло лампи з споживачем R. Обмотка 3 призначена для розжарювання нитки лампи. Приєднання споживача до середньої точки обмотки 3 трансформатора створює однакові умови роботи обох половин нитки розжарювання. На рис. 10—19 зображено схему двопівперіодного випрямляння змінного струму за допомогою двоанодного кенотрона. Для згладжування пульсації струму застосовують згладжуючі фільтри (див.
рис. 10—10). Випрямляють трифазний струм так, як описано в
§ ю-з.
Кенотрони випускають на низьку напругу і на напруги в декілька десятків тисяч вольт і більше, а на струми дуже малі (від кількох міліамперів до десятих часток ампера). Кенотрони ие
Рис.
10—19.
Схема
двопів- періодного випрямляння з одним
двоанодним кенотроном.
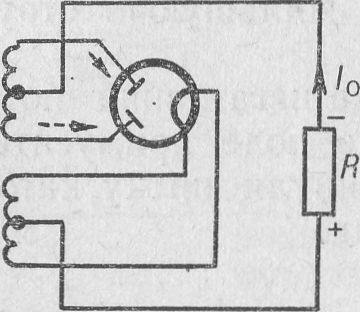
Балони іонних апаратів після евакуації з них повітря заповнюють парами ртуті або інертним газом (аргоном, неоном, гелієм). Тиск у балонах — IO-2—IO-3 мм рт. cm.
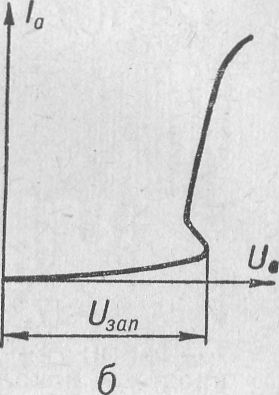 Електрони,
що летять з великою швидкістю від катода
до анода, стикаються з молекулами
заповнювача і, розщеплюючи їх на
позитивно і негативно заряджені
часточки — іони, іонізують заповнювач.
Негативні іони разом з електронами
летять до анода, а позитивні — до
катода. Позитивні іони компенсують
негативний об’ємний заряд, сприяючи
збільшенню емісії.
Електрони,
що летять з великою швидкістю від катода
до анода, стикаються з молекулами
заповнювача і, розщеплюючи їх на
позитивно і негативно заряджені
часточки — іони, іонізують заповнювач.
Негативні іони разом з електронами
летять до анода, а позитивні — до
катода. Позитивні іони компенсують
негативний об’ємний заряд, сприяючи
збільшенню емісії.
Таким чином, на відміну від електронних апаратів, де струм чисто електронний, струм в іонному апараті —електронно-іон- ний. Внутрішній опір іонних апаратів значно менший, тому їх виготовляють з розрахунку на великі струми.
Рис.
10—20.
Газотрон
(а) і його вольтамперна характеристика
(б).
До деякого потенціалу на аноді енергія електронів є недостатньою для іонізації газу, тому струм невеликий (див. рис. 10—20,6). При потенціалі запалювання U3an починається іонізація газу, і струм різко збільшується, а напруга між анодом і катодом внаслі
док компенсації позитивними іонами від’ємного об’ємного заряду дещо зменшується. Потенціал запалювання в газотронах дорівнює 20—ЗО в. Газотрони виготовляють на струми до 100—150 а і напругу до кількох тисяч вольт.
Газотрон економічніший, ніж кенотрон, бо при значних струмах, які він пропускає, спад напруги на ньому не перевищує 15—20 в.
При випрямлянні струму газотронами застосовують ті самі схеми, що й для кенотронів. Термін служби скляних газотронів — до 3000 год.
а
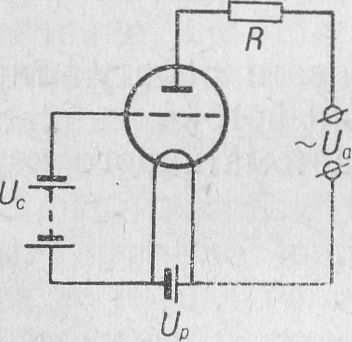
Uc,
в
Ia
6
4
'Л
—
2■
f
0
-2
-4
-Я
\
.
Ua,в
'
0
Uo
\ЮО
200Ділянка
^допалювання ДіЛЯНН!1~~
—
ІІзап
запирання
в
Рис. 10—21. Схема випрямляння змінного струму тиратроном (а), пускова характеристика (б) і сіткова характеристика (¢).
Якщо на сітку тиратрона подати негативний потенціал, то іонізація газу в балоні погіршиться, бо поле сітки гальмуватиме електрони, що вилітають з розжареного катода. Чим більший негативний потенціал буде подано на сітку, тим більший позитивний потенціал треба подавати на анод, щоб іонізувати газ.
Залежність напруги на сітці Uc від напруги на аноді Ua, при якій запалюється тиратрон, називається його пусковою характеристикою (рис. 10—21, б). Якщо точка, яка відповідає певній напрузі на аноді Ua і напрузі на сітці Uc, лежить нижче пускової характеристики, то тиратрон не запалюється (запертий). Якщо ця точка лежить вище пускової характеристики, то тиратрон запалюється.
Залежність анодного струму Ia тиратрона від напруги на сітці Uc при сталій анодній напрузі Ua = const зображена на рис. 10— 21, в. При великих від’ємних напругах на сітці тиратрона він запертий і Ia = 0. Якщо ж поступово зменшувати від’ємну напругу на сітці, то при Uc = U3an тиратрон запалюється, і струм в анодному колі різко зростає до певного значення (залежно від величини анодної напруги і опору анодного кола). Дальша зміна сіткової напруги вже не впливає на величину струму в анодному колі.
Більше того, навіть коли повернутися знову до від’ємних значень напруги, при яких тиратрон був запертий, він працюватиме.
Втрата керування сіткою тиратрона після іонізації пояснюється тим, що простір, в якому міститься сітка, заповнений електронами і позитивними іонами. Негативний і позитивний потенціали, що подаються на мережу, негайно нейтралізуються іонами або електронами, які притягує сітка. Тому наявність потенціалу в мережі тиратрона під час його роботи зумовлює лише виникнення сіткового струму. Для деіонізації газу в тиратроні треба розімкнути коло або різко зменшити анодну напругу.
Вмикання струму з допомогою тиратрона здійснюється дуже швидко (за час приблизно IO-7 сек). Таким чином, тиратронами безінерційно вмикають електричне коло і тому їх широко застосовують в автоматиці і телемеханіці.
Отже, сітка дає змогу досить легко регулювати роботу тиратрона, у потрібні моменти запирати і відкривати його.
Тиратрони широко застосовують у схемах автоматичного керування різними процесами.
4. РТУТНІ ВИПРЯМЛЯЧІ
Ртутні випрямлячі бувають скляні і металеві, однофазні і трифазні. Однофазні звичайно мають два аноди для двопівперіодного випрямляння. За принципом роботи вони належать до іонних апаратів. Основною частиною випрямляльної установки першого типу є скляна колба з відростками, в якій створено вакуум IO-3 — —IO-4 мм рт. cm. (рис. 10—22).
Верхня, розширена частина колби 1 називається конденсаційною камерою, в якій пара ртуті конденсується і по стінках стікає вниз. У верхні відростки впаяні головні аноди 2, виготовлені з заліза або графіту. Ртуть 4 на дні колби є катодом. Ртуть 3 в нижньому відростку колби є анодом запалювання.
Схема вмикання однофазного ртутного випрямляча для двопівперіодного випрямляння з самозбудженням (без анодів збудження) зображена на рис. 10—22, а. На основні аноди А х і А а і на анод запалювання A3 ртутної колби подають змінну напругу. Навантаження Rh з послідовно сполученим дроселем Д ввімкнено між катодом' колби K і середньою точкою вторинної обмотки трансформатора T. Опір г у колі анода запалювання призначений для обмеження пускового струму під час пуску випрямляча.
Для пуску ртутного випрямляча колбу обережно нахиляють так, щоб ртуть катода і анода запалювання злилася. Потім натискують на пускову кнопку ПК,. При цьому під дією е. р.с. правої половини вторинної обмотки трансформатора виникає струм, який проходитиме через опір г, ртутний місток між анодом запалювання та катодом і далі через пускову кнопку до трансформатора. Цей струм спричинює нагрівання і випаровування ртуті. При поверненні
колби в нормальне положення ртутний місток розривається, виникає дуга, і катод стає джерелом вільних електронів.
а
Рис.
10—22.
Схема
роботи двопів- періодного ртутного
випрямляча з самозбудженням (а)
і
крива
випрямленого струму без фільтра
(б).
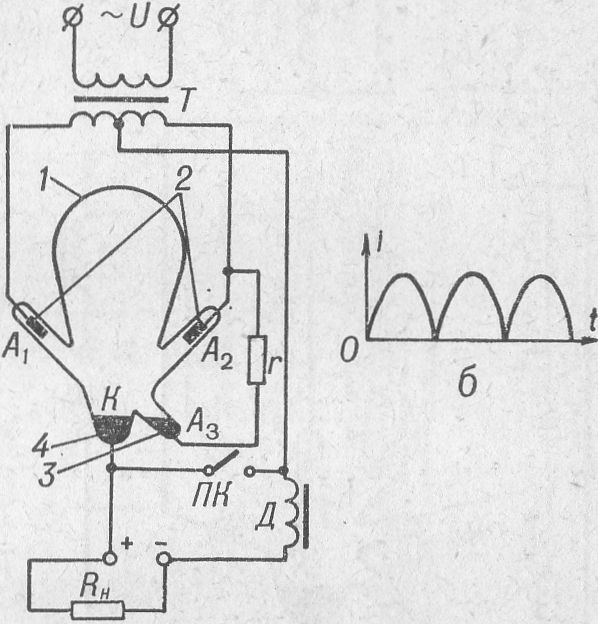
позитивної напруги між анодом і катодом нижче критичної струм у колі переривається, і дуга гасне. Пара ртуті дуже швидко втрачає іонізацію; з появою на другому аноді позитивного потенціалу дуга знову не запалюється.
При наявності дросельної котушки струм відстає за фазою від напруги. При зменшенні напруги нижче критичної дуга між першим анодом і катодом підтримується і в колбі відбувається іонізація пари ртуті. Коли на другий анод надійде позитивний потенціал, дуга перейде з першого анода на другий і не перерветься. Таким чином, відбувається двопівперіодне випрямляння (рис. 10—22, б).
Дуга в колбі може існувати тільки при струмі, не меншому від 4—5 а. Щоб дуга не погасла при менших струмах, застосовують аноди збудження. Вони пропускають невеликий струм, достатній для підтримування катодної плями і іонізації в колбі.
При зміні знака напруги між анодом і катодом (зворотна напруга), коли на анод надходить негативний потенціал, між електродами виникає дуже незначний струм зворотного напряму (близько кількох міліамперів).
^ll
sin π/т
π/т
'
(10—12)
нап-
Рис.
10—23.
Схема
сполучення трифазного ртутного
випрямляча^) і випрямлений струм без
фільтра (б).
Скляні
ртутні випрямлячі виготовляють на
струми до 500
а
при напрузі до 600
в
і на струми до 20
а
при
напрузі до 15
кв.
Відносна
крихкість скляної колби і потреба
відведення значної кількості тепла,
що виділяється у випрямлячах великої
потужності, зумовлюють потребу
заміни скляної колби стальною посудиною
з подвійними стінками, між якими
циркулює охолодна вода — це так звані
металеві
ртутні випрямлячі
(рис. 10—24).
Усередині
стальної посудини розміщені головні
аноди А,
ізольовані і захищені стальними
циліндрами, щоб між анодами не виникло
зворотного запалювання.
Металеві
ртутні випрямлячі звичайно мають шість
або дванадцять анодів, які живляться
від шести- і дванадцятифазних анодних
трансформаторів (на рис. 10—24,
б
зображено тільки два аноди). Збільшення
числа анодів зменшує пульсацію
випрямленого струму.
Шість
фаз для живлення анодів дістають на
вторинній обмотці трансформатора,
сполучаючи середини трьох фаз обмотки
Схема
сполучення трифазного ртутного
випрямляча зображена на рис. 10—23.
Три
головних аноди випрямляча приєднані
до трьох вторинних обмоток трансформатора
T1,
нульова
точка якого є мінусом кола випрямленого
струму. Кола анодів збудження живляться
від трансформатора T2,
середня точка якого сполучена з катодом
K-
Робочий
процес у трифазному випрямлячі такий
самий, як і в
однофазному.
Дуга в трифазному
випрямлячі
буде між катодом і тим з анодів, який у
цей момент матиме вищий потенціал.
Кожний головний анод працює одну третину
періоду (поки на ньому найбільший
позитивний потенціал). Криві
випрямленого струму зображено на рис.
10—23,
б.
Величину
випрямленої напруги U0
визначаємо
за формулою:
т
=
З,
U0=
1,17 Uф.
U0
= V 2 иф
де
ш — число фаз для однофазного ртутного
випрямляча;
Uф
— діюче значення фазної руги.
При
т
=
2, U0
=
0,9 иф;
при





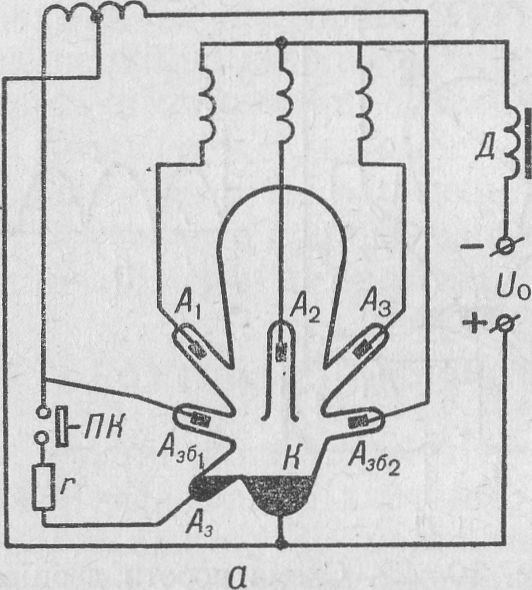
![]()
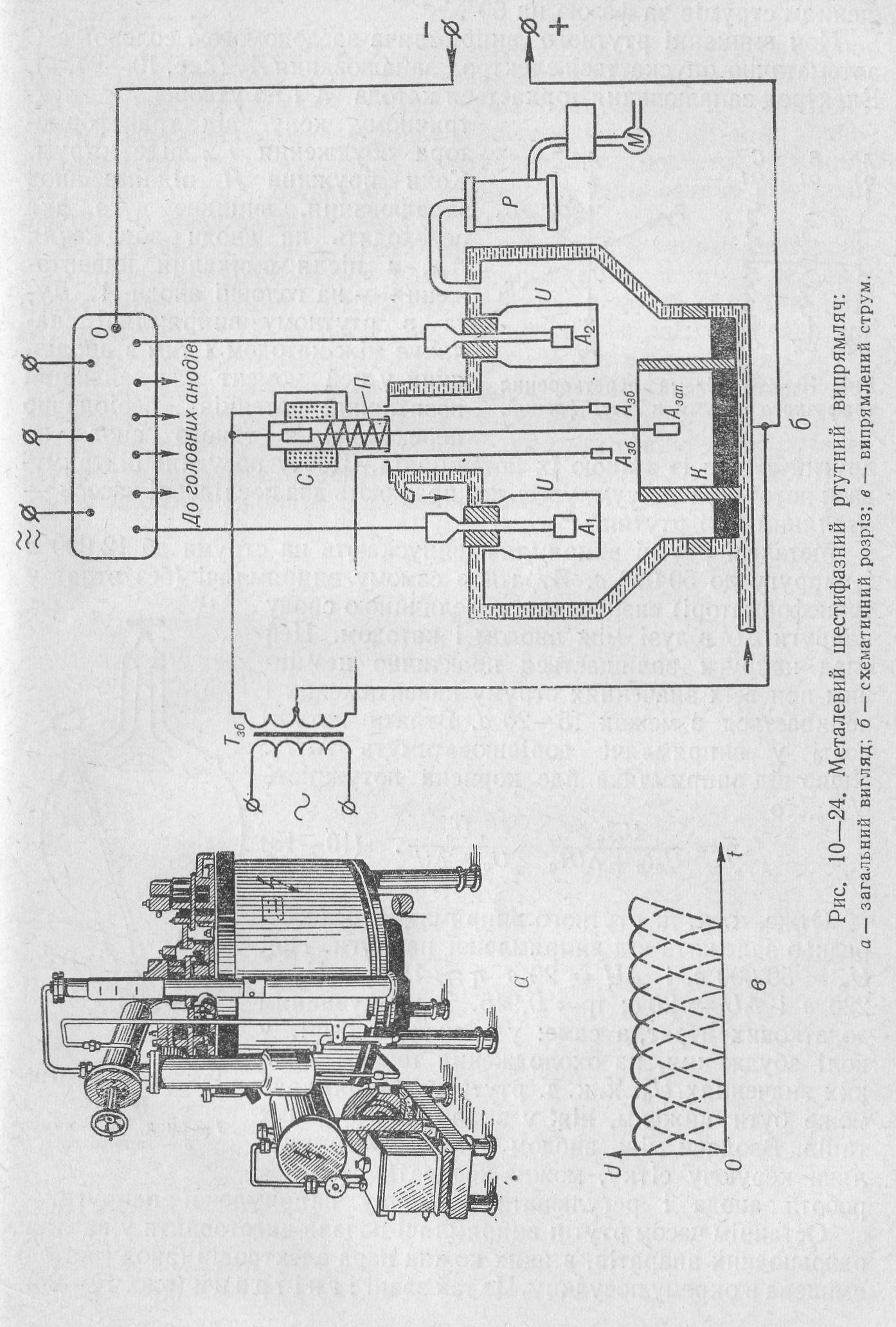
(рис. 10—25). При цьому утворюється шестипроменева зірка із зміщенням струмів за фазою на 60°.
Рис.
10—25.
Схема
перетворення трифазного струму в
шестифазний.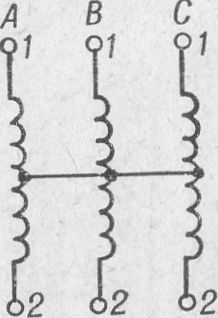
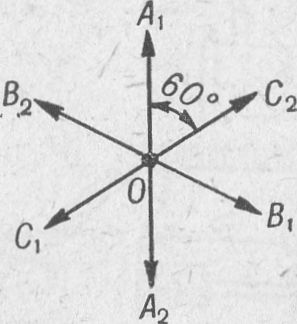

(10—13)
Рис.
10—26.
Ігнітрон:
анод;
2
—
катод;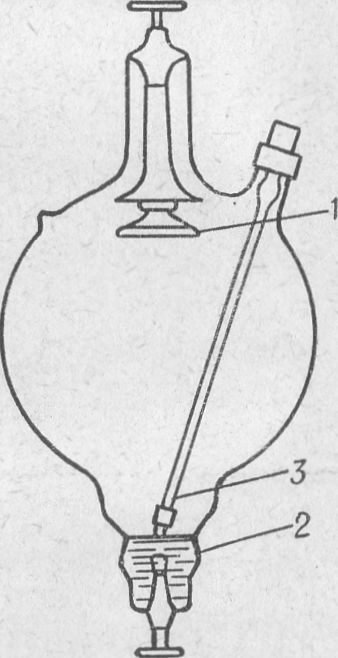

Якщо від випрямляча йде корисна потужність то
η
U0I о + AUl0 U0 + AU
Отже, к. к. д. ртутного випрямляча безпосередньо залежить від випрямленої напруги. При U0 = 50 000 в і AU = 20 в η ~ 1; при U0 =
З
-
-
запалювач.

Останнім часом ртутні випрямлячі почали виготовляти у вигляді одноанодних апаратів, в яких кожна пара електродів (анод і катод) вміщена в окрему посудину. Це так звані ігнітрони (рис. 10—26).
Вони мають менший спад напруги, більший к. к. д. і допускають більші струми.
В ігнітроні, крім анода І і ртутного катода 2, вміщено запалю- вач 3. Запалювач являє собою карборундовий (не змочуваний ртуттю) стержень, опущений у ртуть. При пропусканні електричного струму через запалювач у тонкому перехідному шарі між карборундом і ртуттю утворюється електричне поле, достатнє для іонізації пари ртуті. При роботі ігнітрона як випрямляча він запалюється в кожний період змінного струму.
Ртутні випрямлячі з керуючими сітками, а також тиратрони і ігнітрони застосовуються для випрямляння струму і перетворення (інвертування) постійного струму в змінний на лініях електропередачі. Ці апарати встановлюють у кінці лінії електропередачі постійного струму. Називають їх інверторами.
Ртутні випрямлячі тепер є основним типом промислового випрямляча. Вони мають високий к. к. д., тривалий термін служби, надійні в роботі, мають нескладну автоматизацію тощо. Через ртутні випрямлячі живлять двигуни трамваїв і тролейбусів, метро, шахтні і прокатні установки тощо.
ЕЛЕМЕНТИ АВТОМАТИЧНИХ ПРИСТРОЇВ TA СИСТЕМ АВТОМАТИКИ
1. ЗАГАЛЬНІ ВІДОМОСТІ
Економічні завдання, поставлені в Програмі КПРС, передбачають створення матеріально-технічної бази комунізму, основою якої є технічний прогрес з широким застосуванням різних машин і пристроїв для комплексної механізації і автоматизації.
Рівень автоматизації стає нині основним показником технічного розвитку країни. Вирішальним способом підвищення продуктивності праці є застосування автоматичних пристроїв і систем автоматики в усіх галузях народного господарства. Тепер неможливо знайти жодної галузі техніки, де б не застосовувалась автоматика.
Будь-яка система автоматики складається з окремих елементів, пов’язаних між собою. Властивості системи автоматики залежать від властивостей елементів, які входять до її складу. Кожний елемент системи розв’язує завдання якісного чи кількісного автоматичного перетворення або впливу попереднього елемента системи і передачі його наступному елементу. Окремий елемент автоматичного пристрою може бути розглянутий як перетворювач енергії (рис. її—I). На вхід його подається енергія X1, а після перетворення фізичної величини або її характеру на виході матимемо енергію X2.
Елементи можуть бути пасивними або а к- т и в н и м и. Пасивні елементи не мають джерела енергії. Енергію величини X2 черпають тільки з енергії X1 і внаслідок втрат X1 > X2.
Активні елементи мають джерела енергії. Вхідна величина X1 лише керує пропусканням цієї енергії на вихід. Тому в активних елементах вихідна енергія може бути і більшою за вхідну.
Величини X1 і X2 можуть бути як електричними (струм, опір, напруга), так і неелектричними (швид-
кість, в’язкість, переміщення, тем- χ
гіература, тиск, прискорення та ін.). 1—*- —-—
Проте в більшості випадків застосову-
ються електричні величини, а тому
надалі розглядатимемо тільки 0Л6К- Рис. 11—1. Елемент автоматич- ТрИЧНІ. ного пристрою як перетворювач
Автоматичні пристрої і системи. енергії,
автоматики складаються з різноманітних елементів, які за характером виконуваних функцій можна поділити на шість основних груп: 1) датчики; 2) підсилювачі;
стабілізатори; 4) реле; 5) розподілювачі; 6) двигуни.
Розглянемо кожну групу елементів автоматики за функціями, які вони виконують.
2. ДАТЧИКИ
Датчик — це вхідна частина автоматичного пристрою, що сприймає вплив ззовні і виконує безперервне перетворення цього впливу у вид, зручний для передачі на інші частини пристрою, наприклад, вплив тиску, довжини, швидкості, температури тощо — у механічну зміну положення вузла або деталі, у зміну електричного струму кола тощо. Датчик слід розглядати як пристрій, що складається з приймального (чутливого) елемента і проміжних перетворювачів. Чутливий елемент — це пристрій, який сприймає безпосередньо від об’єкта будь-які фізичні або хімічні величини і перетворює їх в інші величини, зручніші для використання в автоматичних системах. За видом вихідної електричної величини датчики, що застосовуються в системах автоматики, поділяють на параметричні і генераторні.
Параметричні датчики характеризуються тим, що зміна контрольованої величини впливає на параметр електричного кола (опір, індуктивність, ємність).
Генераторні датчики характеризуються тим, що величина, яка контролюється або регулюється, перетворюється в е. р. с.
До параметричних датчиків належать: реостатні, вугільні, дротяні, індуктивні, ємнісні, фотоопори, термопари опору та ін.
До генераторних слід віднести: термопари, п’єзоелементи, фотоелементи з запірним шаром, тахогенератори постійного і змінного струму.
Розглянемо конструкції пристроїв і принцип дії деяких параметричних та генераторних датчиків, які широко застосовуються на практиці.
а) Параметричні датчики
Реостатні (потенціометричні) датчики. Під реостатним, або потенціометричним, датчиком мають на увазі дротяний реостат, повзунок якого механічно зв’язаний з об’єктом, що переміщується.
Переміщення об’єкта може бути як лінійним, так і кутовим. За допомогою такого датчика механічне переміщення перетворюється в зміну опору. На рис. 11—2 подано реостатні датчики, які дають змогу перетворювати кутове (а) і лінійне (б) переміщення в зміну опору.
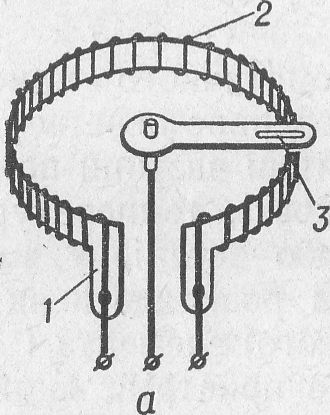 Реостатний
датчик складається з каркаса 1,
виготовленого
з ізольованого матеріалу (пластмаса,
текстоліт та ін.),
на який намотують обмотку 2.
Обмотку
виготовляють з константану, манганіну
або фехралю і покривають ізоляційною
емаллю. У тих випадках, коли реостатний
датчик застосовують для передачі відліку
дуже чутливих приладів, обмотку датчика
виготовляють з платино-іри- дієвого
дроту. Він має високі антикорозійні
властивості і забезпечує надійний
контакт з повзунком.
Реостатний
датчик складається з каркаса 1,
виготовленого
з ізольованого матеріалу (пластмаса,
текстоліт та ін.),
на який намотують обмотку 2.
Обмотку
виготовляють з константану, манганіну
або фехралю і покривають ізоляційною
емаллю. У тих випадках, коли реостатний
датчик застосовують для передачі відліку
дуже чутливих приладів, обмотку датчика
виготовляють з платино-іри- дієвого
дроту. Він має високі антикорозійні
властивості і забезпечує надійний
контакт з повзунком.
' |
_2Г U1 0 I J |
( |
||||
|
|
|
||||
|
|
[Ul і. |
4J |
|||
Ґ "/Г 2 |
, 1' , |
U2 0 |
||||
Рис. 11—2. Реостатні датчики:
а — кутового переміщення; б — лінійного переміщення.
Повзунок 3 виготовляють з двох-трьох дротинок або пружної металевої щітки. У датчиках з лінійною зміною опору вихідна напруга U2 пропорційна величині зміщення I1 повзунка (рис. 11—2, б):
Ui = 1J1Ik Де І можна подавати в лінійних одиницях при лінійному або в градусах при кутовому переміщенні.
Похибка реостатних датчиків лежить у межах 0,2 ч-0,5%. До позитивних якостей реостатних датчиків слід віднести малі вагу і габарити, простоту конструкції, достатньо високу надійність у роботі, незначне споживання енергії, можливість кивлення постійним і змінним струмом. Наявність рухомого електричного контакту і значні зусилля для переміщення повзунка є недоліками датчиків цього типу.
Реостатні датчики широко застосовуються для контролю положення різних задвижок, клапанів, положення шасі на літаках та ін.
Вугільні датчики. Принцип дії їх грунтується на зміні контактного опору між частинками вугілля при зміні тиску. Вугільний датчик виготовляють у вигляді стовпчика‘(рис. 11 —3), складеного з вугільних або графітових шайб 1.
Шайби мають діаметр 5—10 мм і товщину 1—2 мм. До стовпчика з обох боків кріплять контактні пластини 2. До упорних пристроїв З прикладають осьові зусилля Р. При стисканні контактні електричні опори між шайбами зменшуються. При зменшенні стискання електричний опір стовпчика збільшується. Загальний опір стовпчика
R = Rui + Rkm,
де Rtu — власний опір шайби; Rkui — контактний опір між шайбами.
Для більшої стабільності стовпчику надають початкового стиску близько 20—25 кГІсм2. Такими вугільними датчиками можна замірювати тиск, вібрації, прискорення,
Рис.
11—3.
Вугільний
датчик. Рис. 11—4.
Тензометричні
датчики.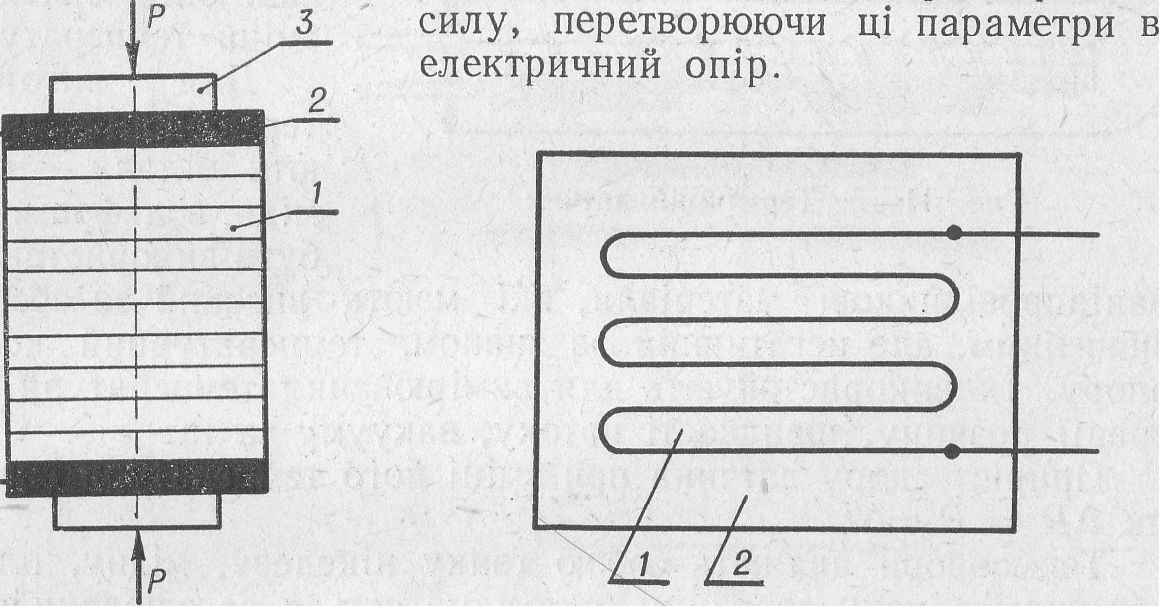
Тензометричні датчики. Принцип дії тензометричних датчиків грунтується на зміні опору матеріалу провідника при деформації (розтяг, стиск) останнього. Опір провідника при сталій температурі дорівнює: R = .
Якщо провідник деформується, то його опір змінюється. Ця зміна відбувається не тільки внаслідок зміни його довжини і площі поперечного перерізу, а й внаслідок зміни структури матеріалу, тобто його питомого опору. Між відносним видовженням
M ■ ■ „ . AR
провідника і відносним приростом його омічного опору
L R
існує відома залежність: ^ = γ ■ ~ , де γ — коефіцієнт тензо-
чутливості матеріалу, що залежить від властивостей провідника і його технологічної обробки.
R
Приріст опору визначається як AR = ^Alγ.
Тензометричні датчики (рис. 11—4) призначені для вимірювання різних деформацій і механічних напруг у досліджуваних конструк
ціях, а також для вимірювання експериментальних тисків у рідинах. Вони мають тонку дротину (або фольгу) 1, укладену і прикріплену до паперу 2. Цей папір у свою чергу прикріплюють до поверхні досліджуваного матеріалу. Для вмикання тензодатчика в схему до кінців дротини (фольги) припаюють два мідних провідники. Для виготовлення тензодатчиків використовують константа- новий або ніхромовий дріт, що має властивість значно змінювати питомий опір при механічних напругах. Крім того, електричний опір ніхрому і константану мало залежить від температури.
використані
властивості провідника змінювати свій
опір залежно від зміни температури.
Для
виготовлення термоопорів застосовують
метали — платину, мідь, вольфрам. Можуть
бути використані також високий за
абсолютним коефіцієнт
Рис. 11—5. Термічний датчик.
напівпровідникові матеріали, які мають значенням, але негативний за знаком, температурний опору. Ix використовують для вимірювання температури, концентрації розчину, швидкості потоку, вакууму та ін.
Приріст опору датчика при зміні його температури визначають як AR = R0а At.
0R
±&RЯ
2г-
Рис.
11—6.
Електролітичний
датчик.
Електролітичні датчики (рис. 11—6). Принцип їх роботи грунтується на властивості змінювати питому провідність електролітів залежно від концентрації розчину.
Провідність електроліту g між двома циліндричними електродами однакового радіуса г з паралельними осями визначиться
2
τν\1
г
Су,
де C
=
—
коефіцієнт,
що характеризує
як
g
TT
In
—



геометричні розміри датчика; γ — питома електропровідність розчину електроліту.
Щоб запобігти електролізу розчину за час вимірювання опору цих датчиків, вимірювання проводять на змінному струмі. Недоліком електролітичних датчиків слід вважати невисоку точність вимірювання, яка зумовлюється нестабільністю температури електроліту. Щоб зменшити похибку вимірювання від впливу температури, у вимірювальну схему вводять компенсуючий термоопір.
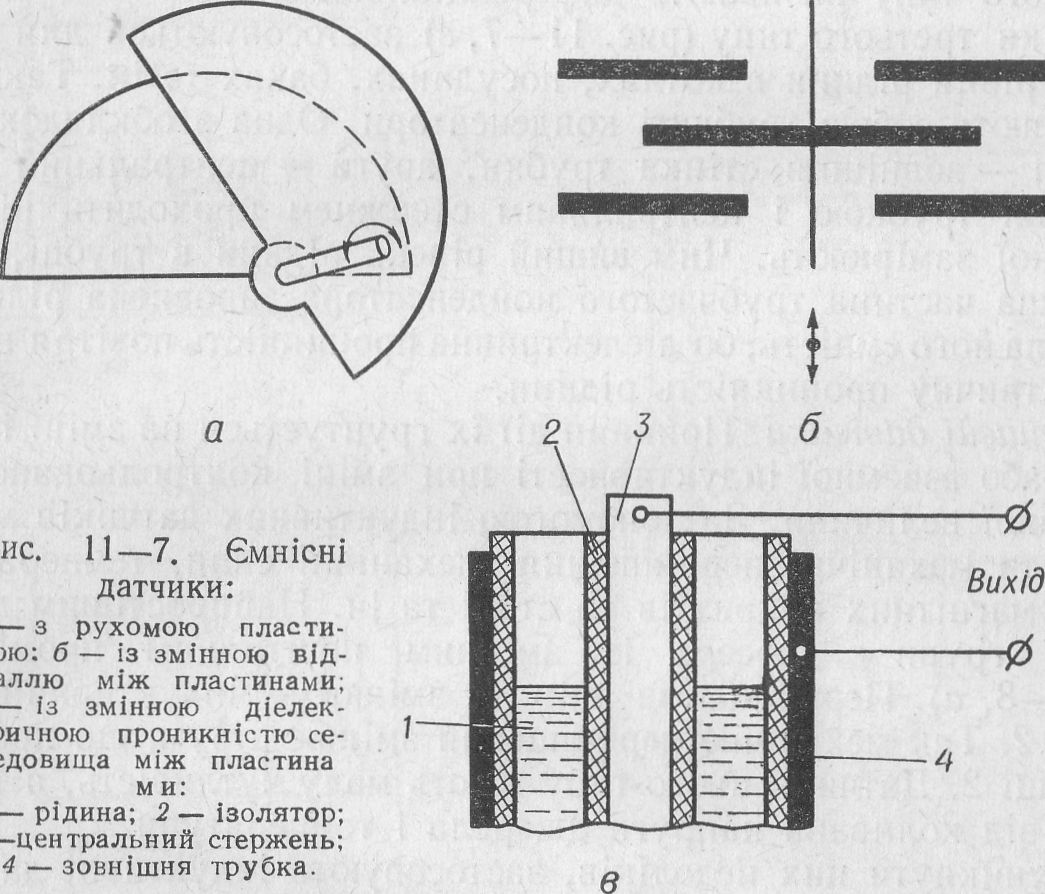
Електролітичні датчики застосовують як перетворювачі механічних переміщень у пропорційні величини електричного струму або напруги. Такі перетворювачі застосовуються в рівномірах, динамометрах, покажчиках вертикалі, покажчиках курсу (компасах) та ін. Електролітом у цих датчиках є розчин азотнокислого свинцю, суміш води, гліцерину і саліцилової кислоти.
Ємнісні датчики. У них використана залежність ємності конденсатора C від віддалі δ між його обкладками, площі обкладок
§
S і діелектричної проникності s середовища між ними: С = є-^ .
Відповідно до цього існують три види ємнісних датчиків: з рухомою пластиною, із змінною віддаллю між пластинами; із змінною діелектричною проникністю середовища між пластинами (рис. 11—7 а, б, в).
Датчики першого типу подібні до конденсаторів із змінною ємністю (рис. 11—7, а). Повертаючи рухому частину, ми змінюємо ємність датчика. Такі датчики зручно використовувати для контролю явищ з незначними кутовими переміщеннями, для передачі показів вимірювальних приладів та ін.
Датчики другого типу (рис. 11 —7, б), призначені для вимірювання вібрацій або дуже малих зміщень — до десятих часток мікрона. Якщо пересувати рухому пластину вгору, то між нею і верхньою пластиною ємність збільшується, а між нею і нижньою пластиною — зменшується. Датчики такого типу найчастіше вмикають у з’єднання плечей місткової схеми, щоб підвищити їх чутливість. Датчики такого типу називають диференціальними.
Датчики третього типу (рис. 11—7, в) застосовуються для вимірювання рівня рідини в котлах, посудинах, баках та ін. Такі датчики являють собою трубчаті конденсатори. Одна з обкладок конденсатора — зовнішня стінка трубки, друга — центральний стержень. Між трубкою і центральним стержнем проходить рідина, рівень якої замірюють. Чим вищий рівень рідини в трубці, тобто чим більша частина трубчастого конденсатора заповнена рідиною, тим більша його ємність, бо діелектрична проникність повітря нижча за діелектричну проникність рідини.
Індуктивні датчики. Принцип дії їх грунтується на зміні індуктивності або взаємної індуктивності при зміні контрольованої або вимірюваної величини. За допомогою індуктивних датчиків можна вимірювати механічні переміщення, механічні сили, температуру, товщину магнітних покриттів на сталі та ін. Найпростішим датчиком цієї групи є дросель із змінним повітряним проміжком (рис. 11—8, а). Переміщаючи якір /, змінюємо індуктивний опір котушки 2. Так механічне переміщення змінює струм, що протікає по котушці 2. Датчики цього типу мають малу чутливість, а також похибку від коливань напруги джерела і температури.
Щоб уникнути цих недоліків, застосовують індуктивні датчики диференціального типу (рис. 11—8, б). Такий датчик складається з двох дроселів із змінними повітряними проміжками. Повітряний проміжок дроселів змінюють за допомогою одного якоря 1. Тоді в одній котушці проміжок збільшується, у другій — зменшується. Кожну котушку вмикають у плечі місткової схеми.
Часто в системах автоматики використовують індуктивні датчики
із зміною взаємоіндуктивності переміщенням якоря. Такі датчики називаються трансформаторними. Використовують їх для вимірювання незначних переміщень. Обмотка 1 (первинна) живиться від мережі змінного струму U1. В обмотці 2 (вторинній) індукується е. р. с. Ег, величина якої залежить від величини повітряного проміжку б.
В індуктивних датчиках з поворотною рамкою (котушкою) також змінюється взаємоіндуктивність (рис. 1 —18, г). Рамка І повертається в повітряному проміжку магнітопроводу 2, в якому створюється
τ
I
~u0
I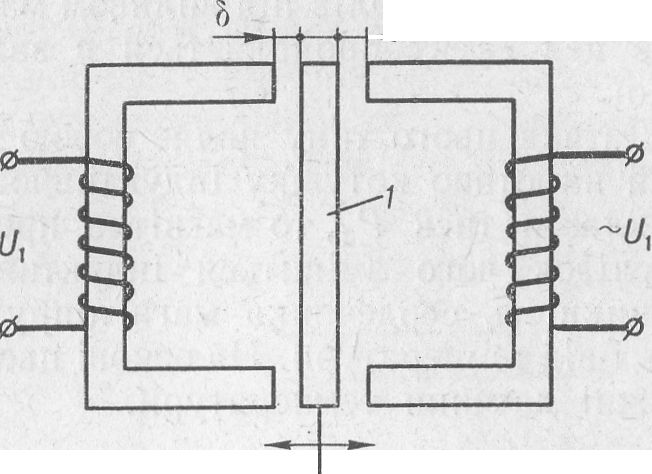


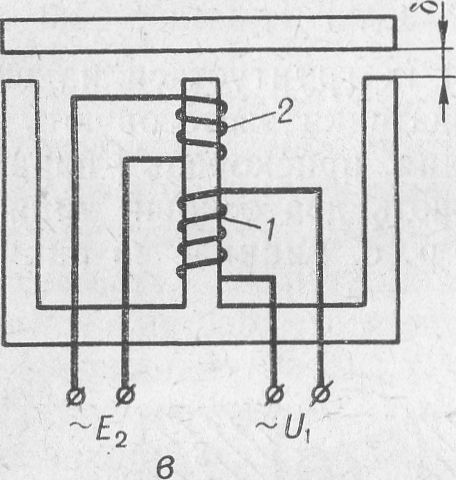
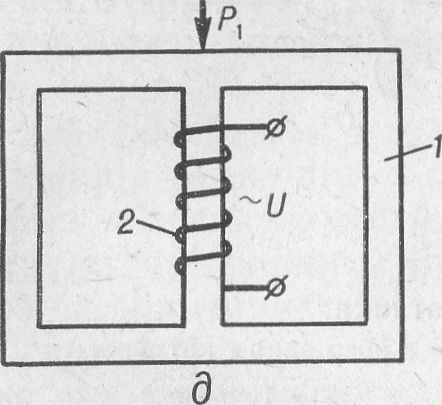
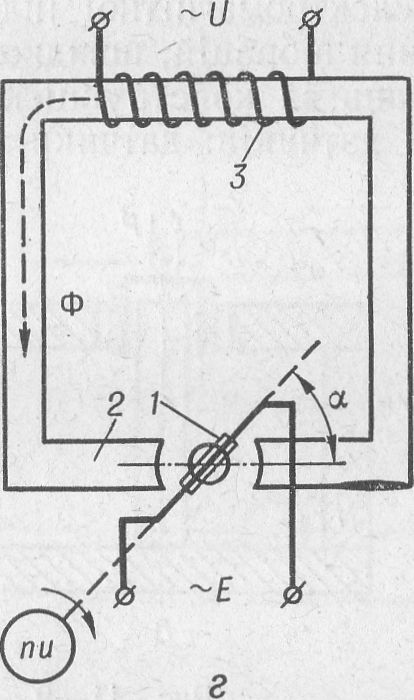
fjfflJX,
змінний магнітний потік Ф, зумовлений обмоткою 3, по якій протікає змінний струм. Коли рамка займає горизонтальне положення, то вона не має магнітного зчеплення з потоком Ф, і е. р. с. у рамці дорівнює нулю. При відхиленні рамки на кут а виникає потокозчеплення, і в рамці індукується е. р. с., пропорційна куту відхилення а рамки. Тут кутове переміщення перетворюється в зміну взаємоіндуктивності обмотки 3 і рамки 1. Такі датчики використовують для вимірювань кутових переміщень у межах +45° і часто застосовують для передачі показів манометрів, ватметрів та ін.
На рис. 11—8, д показано датчик магнітопружного типу. Принцип роботи його грунтується на зміні магнітної проникності феро
магнітних матеріалів під впливом магнітних напружень. Найяскравіше цей ефект проявляється в залізо-нікелевих сплавах — пер- малої.
Датчик цього типу являє собою замкнений магнітопровід /, на який намотано котушку індуктивності 2. Якщо до такого датчика прикласти тиск P1, то магнітна проникність пермалою зміниться, внаслідок чого зміниться індуктивний опір котушки. Магнітна проникність сердечника магнітопружного датчика може змінюватись і від температури. На основі цього створені індуктивні магніто- пружні датчики температури.
б) Генераторні датчики
Індукційні датчики. Принцип роботи їх грунтується на використанні електромагнітної індукції. Ці датчики застосовують для вимірювання вібрацій, швидкості обертання, прискорень і параметрів коливань за конструкцією. Розрізняють два основні типи індукційних датчиків: датчики, в яких е. р. с. виникає за рахунок
Рис.
11—9.
Індукційні
датчики:
а
— з поступовим переміщенням котушки;
б
— з обертанням котушки.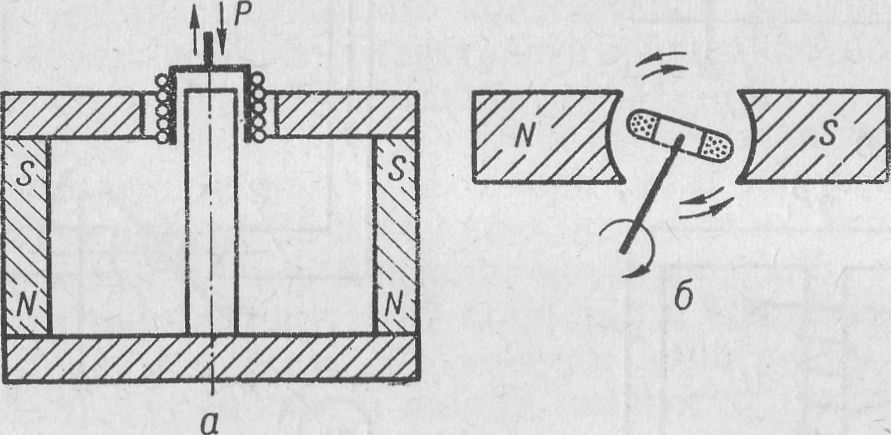
поступового переміщення котушки відносно нерухомого магніту (рис. 11—9, а); датчики, в яких е. р. с. індукції виникає за рахунок обертання рухомої котушки в кільцевому зазорі магніту (рис. 11—9, б).
У процесі обертання котушки або рамки змінюється величина зазора в магнітопроводі, а внаслідок цього і величина виникаючої е. р. с. Індукційні датчики мають високу чутливість. Конструктивно вони являють собою невеликі генератори постійного і змінного струму, які називаються в техніці тахогенераторами.
П’єзоелектричні датчики. В основі їх дії лежить п’єзоелектричний ефект, властивий для деяких кристалів (кварц, турмалін, сегнетова сіль, титанат барію).
Для виготовлення датчиків (рис. 11 — 10) застосовують кварц, що має високу механічну міцність, незначну залежність від темпе-
ратури і високі ізоляційні властивості. Якщо прикласти тиск P на пластинку в напрямі так званої електричної осі кристала на його поверхнях, перпендикулярних до електричної осі, то виникають заряди, пропорційні прикладеному зусиллю, які не залежать від геометричних розмірів пластинки. Величина виникаючих L зарядів мала, тому для вимірювання тиску застосовують кілька пластинок, увімкнених між собою паралельно з додержанням полярності зарядів, що збільшує загальний заряд.
щшшшт
0 "
ШПЩШШ

Рис.
11—10.
П’єзоелектричний
датчик.
Рис.
11—11.
Схема
ввімкнення термопари.
Величина цієї е. р.с. залежатиме від матеріалів, з яких виготовлені елементи термопари, і від різниці температур сполучених і вільних кінців.
Для термоелектричних датчиків (рис. 11 —11) вибирають
такі термоелектроди, які дають найбільше значення термоелектрорушійної сили.
Термоелектрорушійну силу матеріалу визначають у парі з платиною, яку взято за еталон. Найпоширенішими є термопари, що складаються з таких металевих провідників: платини і платино- радію, хромелю і копелю, хромелю і алюмелю, ніхрому і константану та ін.
Фотоелектричні датчики. Ці датчики дають змогу перетворювати енергію світла безпосередньо в електричну напругу. У фотоелектричних датчиків генераторного типу використовуються фото
елементи з запірним шаром. Схема одного з фотоелементів із запірним шаром наведена на рис. 11 —12.
 На
дисковий електрод 1,
виготовлений
з хімічно чистої міді, наносять шар
напівпровідника 2
(закис
міді), а на останній при відповідній
технологічній обробці наносять тонкий
напівпрозорий для світлових променів
шар металу 3.
При
цьому між шаром напівпровідника 2
і
шаром металу 1
утворюється
запірний шар 4,
який
має односторонню провідність. Крізь
запірний шар електрони можуть
проходити від напівпровідника до
металу. Тому при опромінюванні світлом
фотоелемента зовнішні електрони
напівпровідника звільняються і,
проходячи крізь запірний шар до
мідної основи, заряджають його негативно.
На електродах 1
і
З
виникає
деяка різниця потенціалів, тим більша,
чим інтен- Рис.
11—12.
Фотоелектричний
датчик, сивніше
опромінювання фотоелемента. Крім
міднозакисних фотоелементів із запірним
шаром, широко застосовуються селенові
і сірчано-талієві фотоелементи.
На
дисковий електрод 1,
виготовлений
з хімічно чистої міді, наносять шар
напівпровідника 2
(закис
міді), а на останній при відповідній
технологічній обробці наносять тонкий
напівпрозорий для світлових променів
шар металу 3.
При
цьому між шаром напівпровідника 2
і
шаром металу 1
утворюється
запірний шар 4,
який
має односторонню провідність. Крізь
запірний шар електрони можуть
проходити від напівпровідника до
металу. Тому при опромінюванні світлом
фотоелемента зовнішні електрони
напівпровідника звільняються і,
проходячи крізь запірний шар до
мідної основи, заряджають його негативно.
На електродах 1
і
З
виникає
деяка різниця потенціалів, тим більша,
чим інтен- Рис.
11—12.
Фотоелектричний
датчик, сивніше
опромінювання фотоелемента. Крім
міднозакисних фотоелементів із запірним
шаром, широко застосовуються селенові
і сірчано-талієві фотоелементи.
До позитивних якостей фотоелектричних датчиків генераторного типу слід віднести те, що для їх роботи не потрібні джерела живлення. Мала чутливість, значна інертність, залежність від температури — все це недоліки фотоелектричних датчиків із запірним шаром.
Крім розглянутих датчиків, на практиці застосовують цілий ряд інших датчиків, які широко використовуються в системах квтома- тичного контролю, регулювання і керування.
Елементи автоматичних систем: підсилювачі, стабілізатори, реле, розподілювачі, виконавчі двигуни
Підсилювачі. В автоматичних пристроях різноманітні сигнали спочатку перетворюються в електричні, які потім підсилюються і використовуються для керування об’єктом або процесом.
Підсилювачем називається пристрій, в якого основним елементом є електронний, іонний, напівпровідниковий, магнітний або параметричний прилад. Він діє так, що малі зміни електричної величини на його вході приводять до значно більших змін тієї самої або іншої електричної величини на виході.
Залежно від підсилювальних елементів підсилювачі поділяють на лампові, напівпровідникові, магнітні, діелектричні, електромашинні та ін. За призначенням розрізняють підсилювачі напруги
і підсилювачі потужності.
Підсилювачі в пристроях автоматики підсилюють потужність сигналів, що виробляються вимірювальними елементами (датчиками сигналів), до рівня, який потрібний для приведення в дію виконавчих пристроїв.
Підсилювачі на електронних лампах здебільшого складаються з таких елементів: перетворювача, підсилювача напруги, підсилювача потужності і джерела живлення (рис. 11 —13).
Підсилювачі на напівпровідникових тріодах мають кращі характеристики, ніж підсилювачі на електронних лампах.
Рис.
11—13.
Блок-схема
електролідсилювача.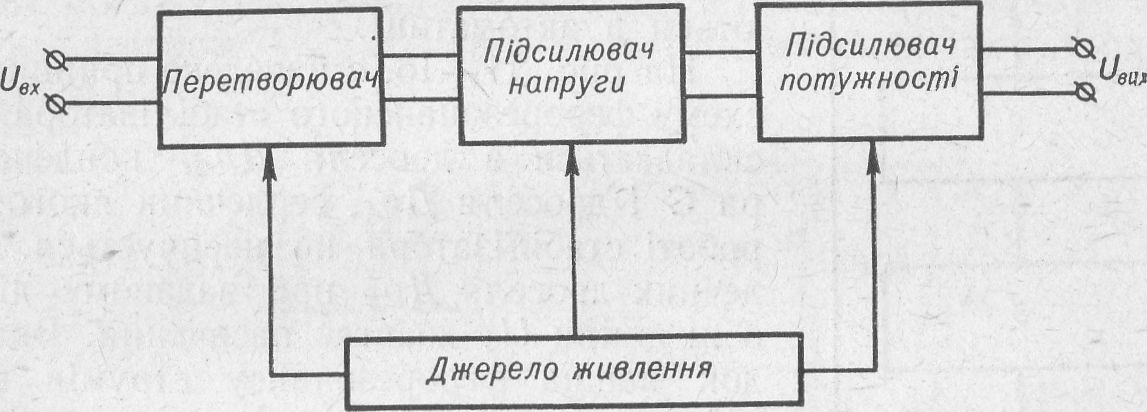
Стабілізатори. Обов’язковою умовою більшості автоматичних пристроїв є вимога підтримувати постійними напругу або струм. Напруга в колі змінного струму практично завжди підлягає коливанням. Такі коливання напруги в багатьох випадках недопустимі, бо призводять до порушень нормальної роботи апаратури. Тому між джерелом струму і споживачем ставлять стабілізатор. Під загальним поняттям стабілізатора напруги слід розуміти пристрій, на виході якого забезпечується стабільна змінна напруга тієї самої частоти, що й напруга живлення. Крім стабілізаторів, існують ще стабілізовані джерела живлення.
За принципом дії стабілізатори поділяються на параметричні і компенсаційні, а стабілізовані джерела живлення — на електронні і електромашинні.
У параметричних стабілізаторах використовуються властивості нелінійних або керованих елементів. Прикладом такого виду елементів є бареттер, газорозрядні і кремнієві стабілітрони, конденсатори з сегнетодіелектриком, трансформатори і дроселі з насиченим магнітопроводом.
Параметричні стабілізатори являють собою розімкнену систему автоматичного керування.
У компенсаційних (рис. 11 —14) стабілізаторах дійсна напруга (або струм) на виході Ueux порівнюється з заданим значенням напруги (або струму); внаслідок порівняння дістаємо різницю сигналів, яка підсилюється елементом 2 і впливає на виконавчий
елемент із стабілізатора, який реагує на елемент 1, доти, поки ця різниця сигналів не стане близькою до нуля. Компенсаційні стабілізатори являють собою замкнену систему автоматичного регулювання.
З параметричних стабілізаторів розглянемо ферорезонансний стабілізатор. Практично найкращі результати за величиною к. к. д.,
І
2
3
Uou>
и„
Рис.
11—14.
Блок-схема
компенсаційного
стабілізатора.
Рис.
11
—15.
Схема
ферорезонансного стабілізатора напруги
(а) і характеристики стабілізатора (б).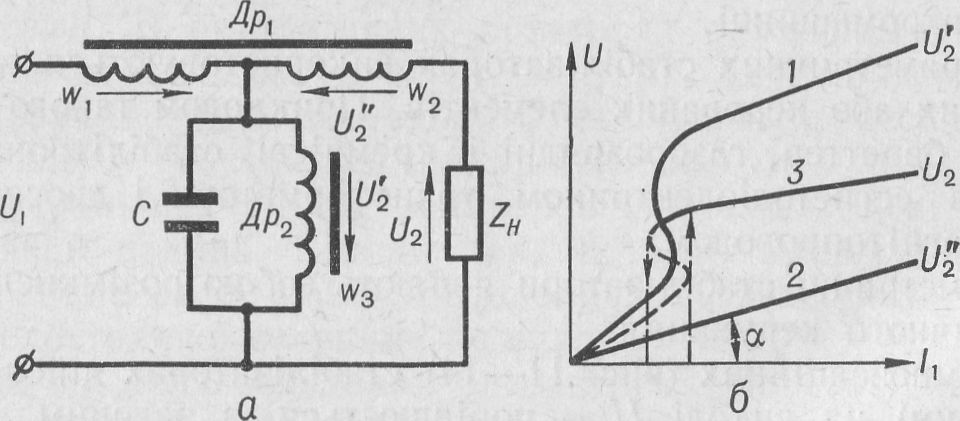
При збільшенні вхідної напруги U1 і струму I1 від нуля вихідна напруга U2 стабілізатора спочатку зростає повільно. При певному значенні U1 вихідна напруга зростає стрибком. При зменшенні U1 до певного значення вихідна напруга стрибком зменшується. Цей інтервал вхідних напруг U1 спричинює нестійку роботу стабілізатора. Робочий режим стабілізатора маємо за межами стрибків.
Розглянемо схему компенсаційного стабілізатора напруги, наведену на рис. 11 — 16. При збільшенні напруги в мережі збільшується вихідна напруга стабілізатора і струм через подільник R1 — R2. Частина вихідної напруги порівнюється з опорною напругою, яка задана кремнієвим стабілізатором Дх. Різниця цих напруг підсилюється тріодом Tn і у відповідній фазі подається на базу тріода Tp,
Tp
Рис.
11—16.
Схема
компенсаційного стабілізатора напруги
на напівпровідникових елементах.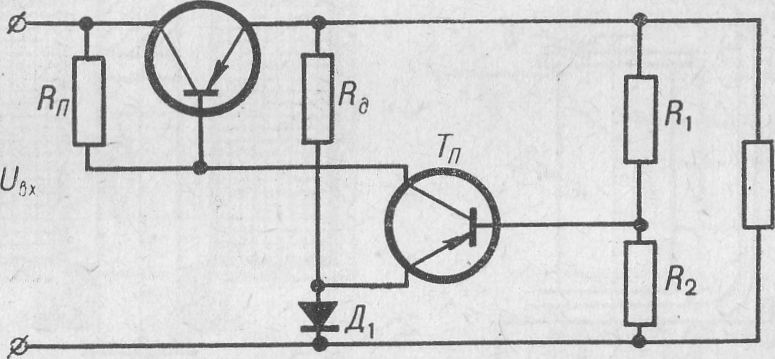
тобто регулюючий тріод Tp прикриється, його внутрішній опір збільшиться, а отже, збільшиться і спад напруги на ньому. Збільшення спаду напруги на тріоді Tp компенсує збільшення напруги в мережі.
Реле. Одним з найпоширеніших елементів різноманітних автоматичних пристроїв є реле. Реле — це прилад, який перетворює плавну зміну вхідної величини в стрибкоподібну зміну вихідної величини.
За принципом дії реле, що застосовуються в автоматиці, поділяють на два великих класи: електромеханічні і електронні. Реле, в яких електрична величина перетворюється в механічне переміщення, що зумовлює перемикання контактів, називається електромеханічним. До них належать: електромагнітні, магнітоелектричні, електродинамічні, індукційні, електротермічні та ін.
Електронні реле — це безконтактні електронні пристрої, в яких перемикання здійснюється різкою зміною провідності кіл.
До безконтактних релейних пристроїв належать електронні, магнітні, тіратронні і фотореле.
Електромагнітне реле. Робота електромагнітного реле (рис.
— 17 ,а) грунтується на притяганні стального якоря 4 до сердечника 5 електромагніту, по обмотці 6 якого протікає струм. Якщо відімкнути
реле від джерела живлення, то під дією зворотної пружини 1 контакти 2 і якір 4 повертаються у вихідне положення. Щоб якір під впливом залишкового магнетизму не залишався притягненим до сердечника, на ньому закріплено невеликий штифт З висотою близько 0,1 мм, виконаний з немагнітного матеріалу (мідь, латунь), який називається штифтом відлипання. Електромагнітне реле спрацьовує під дією струму, що тече по обмотці, або напруги, прикладеної до нього. На рис. 11 — 17, б показано реле з втягнутим якорем. Якір 5 циліндричної форми при збудженні котушки 3, установленої в циліндричний корпус 4 з магнітного матеріалу, втя-
Рис.
11—17.
Електромагнітні
реле:
а
— з кутовим переміщенням якоря; б
— з втяжним якорем.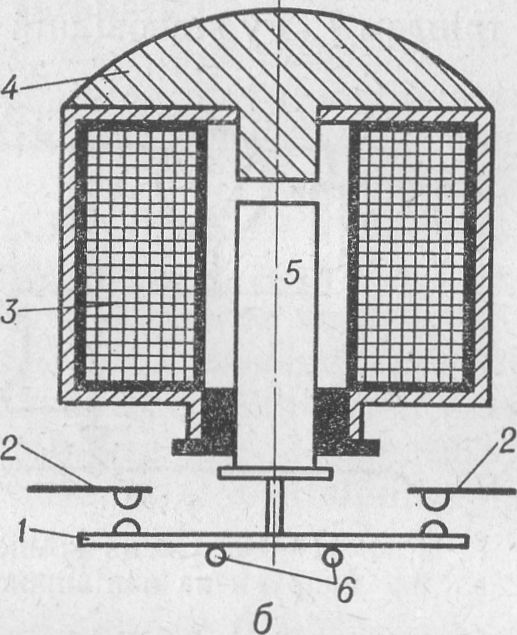
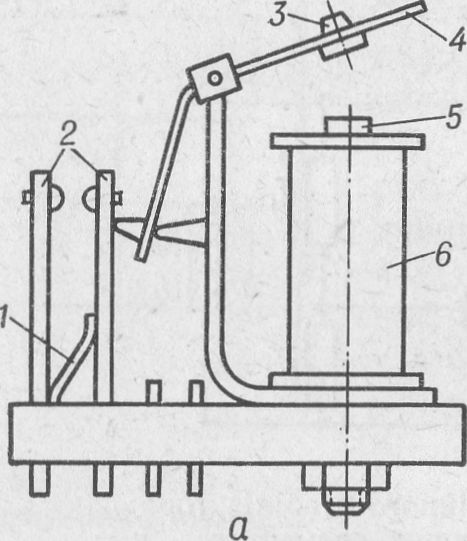 гується
всередину котушки, піднімаючи рухому
контактну пере- мичку 1
і
замикаючи між собою контакти 2.
При
відмиканні джерела якір під дією
сили тяжіння опускається на упори 6,
розмикаючи
контакти 2.
гується
всередину котушки, піднімаючи рухому
контактну пере- мичку 1
і
замикаючи між собою контакти 2.
При
відмиканні джерела якір під дією
сили тяжіння опускається на упори 6,
розмикаючи
контакти 2.
Магнітоелектричне реле (рис. 11 —18). Це звичайний магнітоелектричний прилад, в якого замість стрілки встановлено важіль з контактами. Принцип дії реле полягає в тому, що при протіканні струму через рамку /, яка міститься в полі постійного магніту, вона повертається в ту або іншу сторону залежно від напрямів струму в обмотці керування, внаслідок чого рухомий контакт 2 замикається з нерухомим контактом 3. Чутливість магнітоелектричних реле — до 10~9—10~10 вт. Проте тиск на контактах реле невеликий. Для збільшення тиску застосовують блокуючий пристрій 4, що являє собою два мініатюрних електромагніти, які автоматично вмикаються при замиканні контактів і притягують важіль рамки, тим самим збільшуючи тиск у контактах. Це дає можливість реле перемикати великі потужності. Коли струму в рамці нема, реле не розриває контактів, бо треба розімкнути коло блокування. До недо
ліків магнітоелектричних реле слід віднести їх повільне спрацьовування: 0,1 -V-0,5 сек.
Рис.
11—18.
Схема
магнітоелектричного реле.
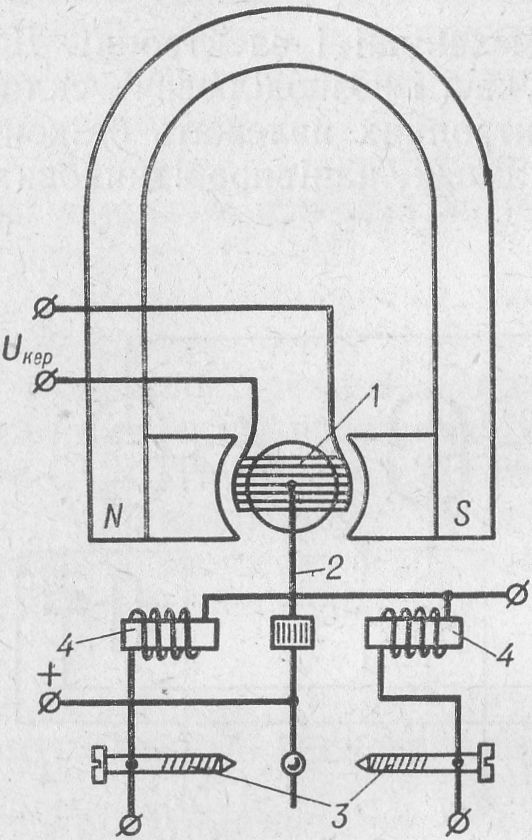
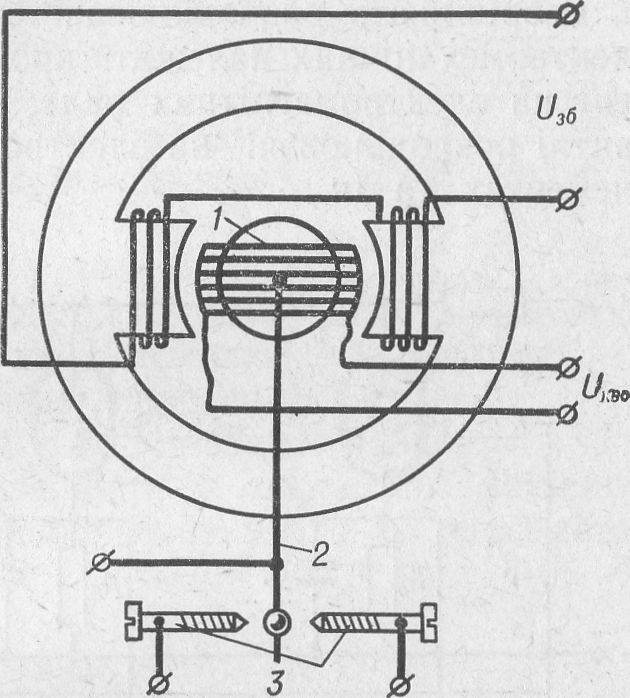
Рис. 11—19. Схема електродинамічного реле:
— рамка,
— рухомий контакт,
— нерухомі контакти.
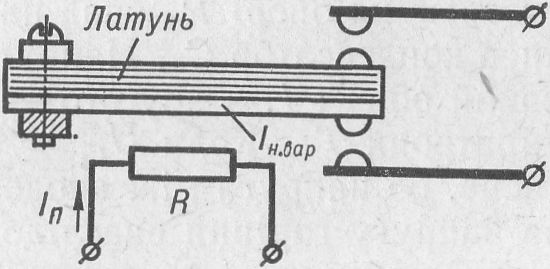 Швидкодійність,
а також керування великими електричними
потужностями є перевагами цих реле
перед магнітоелектричними. Крім того,
електродинамічні реле вигідно
відрізняються від магнітоелектричних
здатністю реагувати на величину фазового
зсуву між струмом у рамці і струмом в
обмотці збудження. До недоліків слід
віднести потребу окремого джерела
збудження.
Швидкодійність,
а також керування великими електричними
потужностями є перевагами цих реле
перед магнітоелектричними. Крім того,
електродинамічні реле вигідно
відрізняються від магнітоелектричних
здатністю реагувати на величину фазового
зсуву між струмом у рамці і струмом в
обмотці збудження. До недоліків слід
віднести потребу окремого джерела
збудження.
Термореле — це пристрої, що здійснюють перемикання в електричних колах при зміні температури. Найбільше поширені біметалеві реле. Сприймаючою частиною цих реле є біметалева пластинка, яка складається з двох металів (рис. рнс_ jj—20. Схема біметалевого 11—20), що мають різні коефіцієнти реле,
лінійного розширення (наприклад,
латунь і інвар). Через нагрівний елемент R протікає струм керування. Струм нагріває обмотку і біметалеву пластинку. Внаслідок
різного видовження шарів пластинка вигинається і замикає контакти. Біметалеві реле мають значну теплову інерцію.
Розподілювачі. Розподілювачем називається пристрій, призначений для почергової дії на різні електричні кола. Розподілювачі знайшли широке застосування в автоматичних установках. Вони застосовуються там, де потрібні контроль і керування багатьма об’єктами.
Розрізняють розподілювачі електромеханічні і електронні. До електромеханічних належать крокові шукачі і розподілювачі, складені на електромагнітних реле; до електронних належать безконтактні розподілювачі на електронних лампах, напівпровідникових елементах та ін.
Рис.
11—21.
Принципова
схема розподільника на тиратронах з
холодним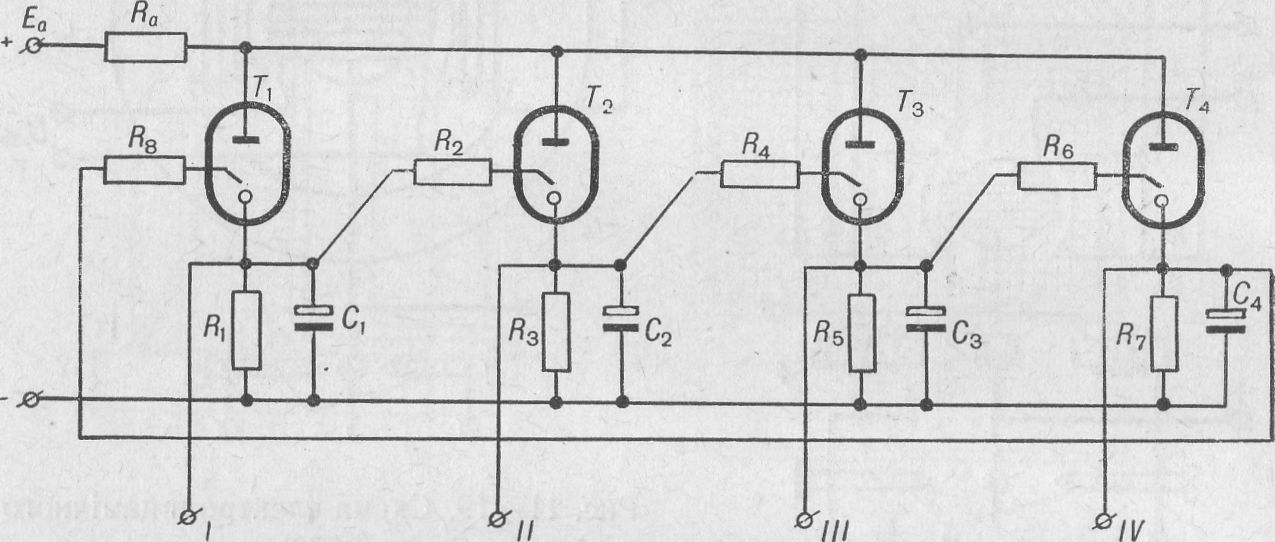
Катодом мтх-90.
На рис. 11—21 наведена принципова схема кільцевого розподілювача на лампах з холодним катодом. Аноди тиратронів T1 ~~ Ti, приєднані до шини, що живиться напругою +Ea через загальний опорний опір Ra. Величина цього опору підібрана так, що завжди може горіти тільки один з чотирьох тиратронів розподілювача, тобто той, в якого створюються кращі умови для запалювання. Нехай загориться тиратрон T1. Через нього пройде струм, який створює на опорі R1 спад напруги. До цієї напруги прагне зарядитись конденсатор C1. Напруга Uel подається з одного боку на керований об’єкт /, з другого — через опір Rj до пускового електрода тиратрона T2. Коли UCl = U3an , тиратрон T2 запалюється, a T1 гасне, бо напруга між анодом і катодом тиратрона T1 стає меншою за напругу горіння внаслідок того, що напруга на конденсаторі C1 відразу змінитися не може. Так по черзі запалюються всі тиратрони і по черзі керуються (контролюються) об’єкти І—IV.
Виконавчі двигуни. У системах автоматики виконавчі двигуни використовуються як виконуючі пристрої. їх установлюють на виході автоматичних пристроїв для здійснення впливу на керуючі або регулюючі органи керованого об’єкта або процесу. Двигуни
постійного струму при однаковій потужності мають більшу вагу, дорожчі і менш надійні ніж двигуни змінного струму, тому їх застосовують рідше. Двигуни змінного струму внаслідок простоти виготовлення і надійності в роботі застосовуються значно ширше. З різноманітності двигунів, які застосовуються в автоматичних системах як виконавчі, тепер застосовують двофазні асинхронні двигуни з короткозамкненим і порожнім роторами.
Рис.
11—22.
Схема
керування двофазним асинхронним
двигуном.
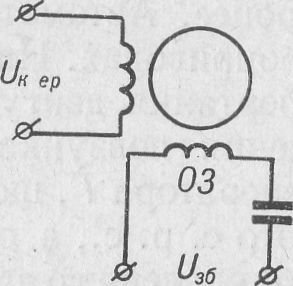
Обмотку збудження вмикають у коло змінного струму через фазозсувний елемент, яким у більшості випадків є конденсатор. Конденсатор вмикають послідовно з обмоткою збудження О. 3. На другу обмотку подається сигнал керування.
Розглянуті вище елементи відіграють в автоматиці важливу роль, бо застосовуються тією або іншою мірою в усіх системах автоматичних пристроїв.
3. Автоматичний контроль і захист.
АВТОМАТИЧНЕ РЕГУЛЮВАННЯ
Усі автоматичні пристрої можна поділити на пристрої автоматичного контролю, автоматичного захисту, автоматичного керування і автоматичного регулювання.
Автоматичний контроль — це галузь автоматики, що охоплює методи і засоби, які звільняють людину від спостереження за тим або іншим виробничим процесом, за роботою тієї або
Рис.
11—23.
Блок-схема
автоматичного
контролю:
O
—
об’єкт контролю; СБ
— сприймаючий блок; ВБ
— виконуючий блок.![]()

Автоматичний захист стежить за справністю установки, а також за правильністю її роботи. Якщо установка несправна або працює при тому чи іншому граничному режимі, то спрацьовує система автоматичного захисту і вимикає її.
Автоматичне керуванн я—це сукупність операцій, що виконуються за допомогою автоматичних пристроїв і потрібні для пуску, зупинки, гальмування, реверса, а також для підтримання або зміни в потрібному напрямі величин, що характеризують процес. Автоматичне керування широко використовується в електроприводах. Нарис. 11—24 наведена схема керування швидкості обертання двигуна Д постійного струму. Автоматична зміна положення повзунка реостата R змінює струм збудження в обмотці генератора Г, що веде до зміни його е. р. с., а отже, і напруга, прикладена до двигуна, змінюватиметься. Таким чином, змінюватиметься швидкість обертання двигуна.
Рис.
11—24.
Схема
автоматичного керування швидкістю
обертання двигуна Д
постійного струму.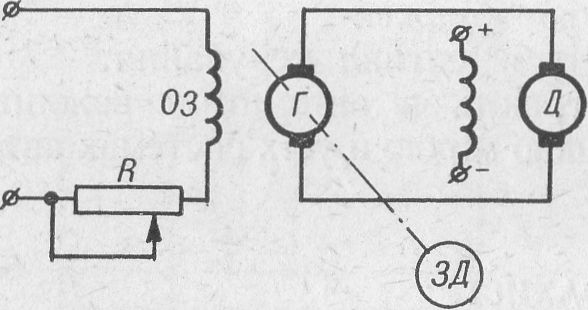
Рис.
11—25.
Функціональна
схема автоматичного регулятора
напруги.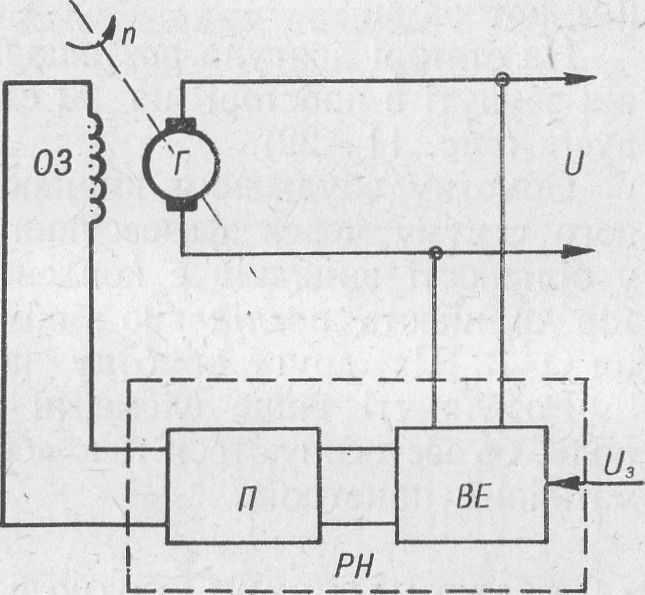

Функціональна схема автоматичного регулятора напруги наведена на рис. 11—25. Тут напруга регулюється впливом на струм збудження. У регулятора напруги PHe вимірювальний елемент BE, в якому відбувається порівняння величини, регульованої напруги U36 генератора Г з заданою величиною напруги U. Вихідний сигнал вимірювального елемента BE малий, щоб керувати струмом збудження генератора Г. Тому цей сигнал підсилюється підсилювачем П, на виході якого під’єднано обмотку збудження. Таким чином, збудження змінюється так, щоб при будь-яких змінах у колі якоря генератора напруга на затискачах генератора встановилася на рівні заданої величини.
Розді л XII ЕЛЕКТРОПРИВОД
1. Загальні відомості
Для пуску робочої машини потрібні електричний двигун, механічна передача і апаратура для керування електродвигуном. Сукупність цих трьох елементів називають електричним приводом.
Електричні двигуни, механічні передачі і електрична апаратура для керування можуть бути різними залежно від типу робочої машини, місця встановлення і вимог до електроприводу.
Правильний вибір потужності двигуна має велике значення. При недостатній потужності двигун перегрівається і не забезпечує нормальної роботи машини- знаряддя; завищена потужність двигуна підвищує вартість установки і знижує к. к. д. та cos φ. He менш важливим є правильний вибір конструктивного типу електродвигуна за способом захисту від впливу виробничого середовища (вогкість, пил, наявність різних газів тощо). До електричної апаратури керування належать вмикаючі і вимикаючі пристрої, плавкі запобіжники, додаткова захисна апаратура тощо.
Найпоширенішою механічною передачею між двигуном і машиною-знаряддям є клинопасова передача. В окремих випадках, коли швидкість обертання робочої машини і двигуна однакові, передача виконується за допомогою муфти.
Розрізняють три види електроприводів: груповий, одиночний і багатодвигунний.
Груповим називають електропривод, в якому рух від одного електродвигуна за допомогою одного або кількох передавальних механізмів передається групі робочих машин. Цей тип привода застарілий і застосовується рідко.
Одиночним, або індивідуальним, називається електропривод, в якому кожна робоча машина приводиться в рух окремим електричним двигуном.
Багатодвигунним називають електропривод, при якому окремі органи однієї машини приводяться в рух окремими електродвигунами.
Якщо електропривод мае електричну апаратуру, яка автоматично (без втручання людини) керує роботою двигуна залежно від вимог виробничого процесу, то такий електропривод називають автоматизованим.
Застосування автоматизованого електропривода підвищує продуктивність праці, поліпшує якість продукції та умови виробництва і полегшує працю робітника.
2. Нагрівання і режими роботи електродвигунів
Якщо для різних механізмів межа допустимого навантаження визначається механічною міцністю окремих деталей, то навантаження електродвигуна обмежується допустимим нагрівом окремих його частин.
Найчастіше двигуни виходять з ладу внаслідок пошкодження ізоляції обмоток від надмірного перегрівання. Перегрівання обмоток є результатом проходження по них недопустимо великого струму, спричиненого механічним перевантаженням двигуна. Якщо двигун працює тривалий час, то обмотки його нагріває струм, що проходить по них; двигун при цьому також нагрівається і тепло з його поверхні розсіюється в навколишнє середовище. Коли навантаження незмінне, обмотки нагріваються рівномірно, а інтенсивність тепловіддачі залежить від ступеня нагрівання двигуна: чим вища температура двигуна (порівняно з температурою навколишнього середовища), тим більше він віддає тепла і швидше охолоджується. Температура двигуна, який почав працювати, спочатку швидко підвищується, а потім, у міру збільшення тепловіддачі, підвищення температури сповільнюється і, нарешті, зовсім припиняється. Настає термодинамічна рівновага, коли при повній потужності тепло, яке виділяється в обмотці двигуна, за той самий час встигає розсіюватись у навколишнє середовище і температура двигуна більше не підвищується. В такому разі настає термодинамічна рівновага двигуна. Якщо двигун працює тривалий час і не перевантажений, тобто має потрібну потужність, то його термодинамічна рівновага настане при температурі, яка безпечна для ізоляції обмоток. Коли двигун працює короткий час, то можливе і перевантаження, бо він не встигає перегрітися. Робоча температура двигуна не може бути довільною, бо, вибравши допустиму температуру дуже невеликою, ми забезпечимо тривалу і надійну його роботу; але двигун при цьому 'буде надто громіздким і дорогим. Якщо, навпаки, виберемо робочу температуру надто високою, то ізоляція обмоток швидко пересохне, а при дуже високій температурі навіть згорить.
Виходячи з бажання мати електричний двигун, з одного боку, досить компактним і дешевим, а з другого, забезпечити тривалість роботи машини в кілька десятків років, електромашинобудівною практикою встановлені величини робочих температур для кожної частини електродвигуна. Так, наприклад, гранично допустима тем
пература для обмоток електродвигунів з ізоляцією класу А становить 95° С, а для класу В — 105° С.
Усі ізолювальні матеріали поділяють на шість класів: А, В, Cr BA, BC і CB, для кожного згідно ГОСТу установлено найбільшу допустиму температуру.
До класу А належать органічні матеріали (бавовна, шовк, папір), просочені діелектриком, а також матеріали з пластмаси, емалі для покриття проводів тощо.
До класу В належать слюда, азбест, скляне волокно з добавкою в’яжучих речовин тощо. До класу C входять скло, фарфор, кварц, слюда і скляне волокно без в’яжучих речовин.
Нагрівання машин залежить не тільки від кількості тепла, що виділяється в ній, а й від умов відведення тепла від машини, тобто від охолодження.
Машини з природним охолодженням майже не випускають, бо відведення тепла в них дуже неінтенсивне. Найбільш поширені машини з самовентиляцією. У таких машинах на валі розміщено вентилятор для відсмоктування нагрітого повітря.
Кількість тепла, яке виділяється в електродвигунах, залежить не тільки від навантаження електродвигуна, а й від тривалості його роботи. Тому розрізняють кілька режимів роботи електродвигуна.
Тривалий режим характеризується незмінним навантаженням, що триває довгий час. Працюючи в цьому режимі, двигун нагрівається до певної температури, допустимої за нормами нагріву. У такому режимі працюють електродвигуни вентиляторів, відцентрових насосів тощо.
Короткочасний режим характеризується робочими періодами і періодами зупинок, причому робочі періоди такі короткі, що двигун не встигає досягти усталеної температури, а періоди зупинок такі тривалі, що двигун встигає повністю охолонути. Двигуни, призначені для короткочасного режиму, нормують для певної тривалості роботи (15, ЗО або 60 хв), яка зазначена в паспорті двигуна.
Повторно-короткочасний режим характеризується безперервним чергуванням однакових щодо характеру робочих періодів і пауз. У робочий період двигун не встигає нагрітися до усталеної температури, а під час паузи не встигає повністю охолонути. Цей режим роботи визначається відносною тривалістю ввімкнення і позначається ПВ («продолжительность включения»), що дорівнює відношенню тривалості робочого періоду до сумарної тривалості циклу (робочого періоду і паузи), поданого в процентах.
Стандарт передбачає такі величини ПВ: 15; 25 і 40% при тривалості одного циклу не більш як 10 хв.
На паспорті двигуна, призначеного для повторно-короткочасної роботи, поряд з його потужністю ставлять величину ПВ, наприклад ПВ-40. Це означає, що при зазначеній потужності двигун може
працювати тривалістю 40% від 10 хв, а решту циклу повинен бути вимкнений.
У цьому режимі працюють двигуни кранів, лебідок, підйомників тощо.
3. Вибір електродвигунів
Вибір електродвигуна для робочої машини або установки зводиться до визначення потужності двигуна, швидкості його обертання, напруги, типу і конструктивного виконання.
Потужність двигуна вибирають залежно від режиму його роботи.
При тривалому режимі роботи двигуна його номінальна потужність повинна дорівнювати потужності навантаження. Якщо в каталозі немає двигуна з потужністю, яка дорівнювала б потужності навантаження, то вибирають найближчий двигун більшої потужності .
Потужності двигуна для тривалої роботи із змінним навантаженням вибирають за еквівалентним струмом.
Еквівалентним струмом називається умовний незмінний струм, теплова дія якого дорівнює тепловій дії змінного струму навантаження.
Якщо протягом одного циклу роботи загальною тривалістю T електродвигун за період Z1 споживає струм I1, за період t2 — струм
I2 і т. д., то кількість тепла в джоулях, яке виділяється в обмотці за цикл на підставі закону Ленца—Джоуля, буде:
k
(12-1)
де г —опір обмотки двигуна; k — число періодів в одному циклі.
Сума окремих періодів дорівнює тривалості циклу, тобто
k
Σί = τ.
З другого боку, еквівалентним струмом за цикл виділиться та сама кількість тепла:
(12-2)
k
Оскільки
Q==Q',
то
l\rT
= YiPrt,
звідки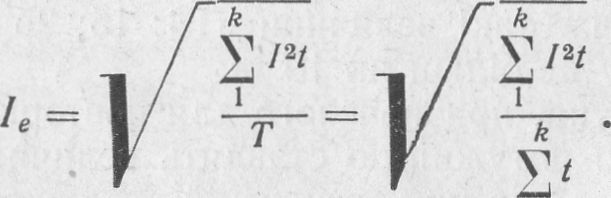

Таким чином, еквівалентний струм дорівнює середньоквадратич- ному значенню струму, який змінюється за заданим графіком.
Від струмів можна перейти до потужностей на підставі формул: P = UI (для двигунів постійного струму) і P = YWI cos φ (для трифазних двигунів змінного струму).
Якщо напруга сітки і коефіцієнт потужності (при невеликих змінах навантаження) сталі, то струм буде пропорційний потужності :
де Pe — еквівалентна потужність двигуна; P1, P2, ... — навантаження двигуна за відповідні періоди tlt t2, ...
Відповідно до знайденої еквівалентної потужності вибирають за каталогом двигун, який має номінальну потужність Рн, не меншу за Pe. Цей двигун, працюючи за заданим графіком, буде в певні періоди перевантажений або недовантажений, а в середньому, за нагріванням обмотки, перебуватиме в допустимих межах. Вибраний двигун перевіряють на можливість подолання миттєвого перевантаження за графіком роботи робочої машини.
При повторно-короткочасному режимі двигун вибирають за каталогом відповідно до знайденої еквівалентної потужності і потрібної відносної тривалості ввімкнення ПВ.
Щодо вибору двигуна за видом струму, то слід зауважити, що перевага електродвигуна постійного струму перед електродвигуном змінного струму полягає в можливості плавного і економічного регулювання швидкості. У всьому іншому асинхронний трифазний двигун простіший, дешевший і надійніший, ніж двигун постійного струму. Тому двигун постійного струму застосовують лише в спеціальних приводах, де до регулювання швидкості ставлять великі вимоги.
Вибираючи електродвигун за швидкістю, виходять з таких міркувань: чим швидкохідніший двигун, тим (при певній потужності) розміри його менші, а, отже, він буде легший і дешевший. Пояснюється це тим, що розміри електродвигуна визначаються його обертальним моментом, який пропорційний добутку магнітного потоку на струм (в якорі або роторі) /И = Ф/. Струм визначає переріз проводів, а магнітний потік — переріз магнітопроводу. Оскільки механічна потужність двигуна пропорційна моменту і числу обертів Ph = Mn, то потужність двигуна певних розмірів (М = const) зростає із збільшенням швидкості обертання п. Навпаки, чим менша швидкість, тим при певній потужності (Рк = const) двигуна його розміри більші. Тому бажано вибирати швидкохідні двигуни. При
цьому швидкість двигуна повинна бути такою, щоб між двигуном і виконавчим механізмом була мінімальна кількість передач. Для забезпечення високих швидкостей двигунів змінного струму (понад 3000 об!хв) застосовують спеціальні генератори підвищеної частоти. Для привода тихохідних механізмів застосування відповідних тихохідних двигунів не бажане, бо вони громіздкі і дорогі. Застосування для цього швидкохідних двигунів потребує створення громіздких механічних передач, що також не бажано. У таких випадках питання розв’язується техніко-економічним розрахунком.
За конструктивним виконанням електродвигун вибирають залежно від середовища, в якому він працюватиме: відкритого, захищеного, закритого, вибухобезпечного типу тощо.
12—4. АПАРАТУРА КЕРУВАННЯ ЕЛЕКТРОДВИГУНАМИ
Електричними апаратами називають пристрої, призначені для вмикання і вимикання електричних кіл (комутаційна апаратура) і захисту окремих елементів кіл (захисна апаратура). До комутаційних і захисних апаратів належать рубильники, вимикачі, перемикачі, контактори, магнітні пускачі, запобіжники, реле тощо.
Керування приводними двигунами може бути ручним і автоматичним.
Захист електродвигунів від перевантаження, короткого замикання, підвищення, зниження і втрати напруги здійснюється автоматично.
До апаратури ручного керування належать рубильники, пакетні вимикачі і перемикачі, контролери і пускові реостати.
При виборі апаратів ураховують потужність і режим роботи привода, величину напруги тощо. Для безпечної роботи вибирають апарати ручного керування так, щоб їх номінальний струм був утричі більший за струм споживачів.
Розглянемо апаратуру ручного керування.
Рубильники і перемикані. Призначені для нечастої комутації ■■(вмикання, вимикання і перемикання) електричних кіл постійного і змінного струму напругою до 500 в.
Рубильники і перемикачі бувають одно-, дво- і триполюсні на величину струму 100, 250, 400, 600 а різних типів: Р, PB, РПБ, РПЦ, П, ПБ, ППБ, ППЦ тощо.
Позначення типів рубильників розшифровується так: P — рубильник, PB — рубильник з бічною ручкою, РПБ — рубильник з бічним приводом, РПЦ — рубильник з центральним важільним •приводом. Перша цифра після літер показує кількість полюсів, друга — величину номінального струму апарата в сотнях амперів. Перемикачі розшифровують так само, як і рубильники.
Триполюсні рубильники з бічним важільним приводом типу РПБ-31 і типу РПЦ зображено на рис. 12—1, а і б. Для забезпечення техніки безпеки рубильники оснащені захисними кожухами
або їх поміщають у пластмасові чи стальні пускові ящики· (рис. 12—1, в).
На рис. 12—2 зображено перемикачі типів П-32 (без кожуха) і ППЦ.
Для невеликої потужності застосовують рубильники з бічною ручкою і кожухом типу PK (рис. 12—3, а). Три мідні ножі 7 з’єднані ізолюючою траверсою 4, можуть за допомогою ручки З повертатися навколо осей 5. Ці ножі в положенні, показаному на рис. 12—3, а,
Рис.
12—1.
Триполюсні
рубильники: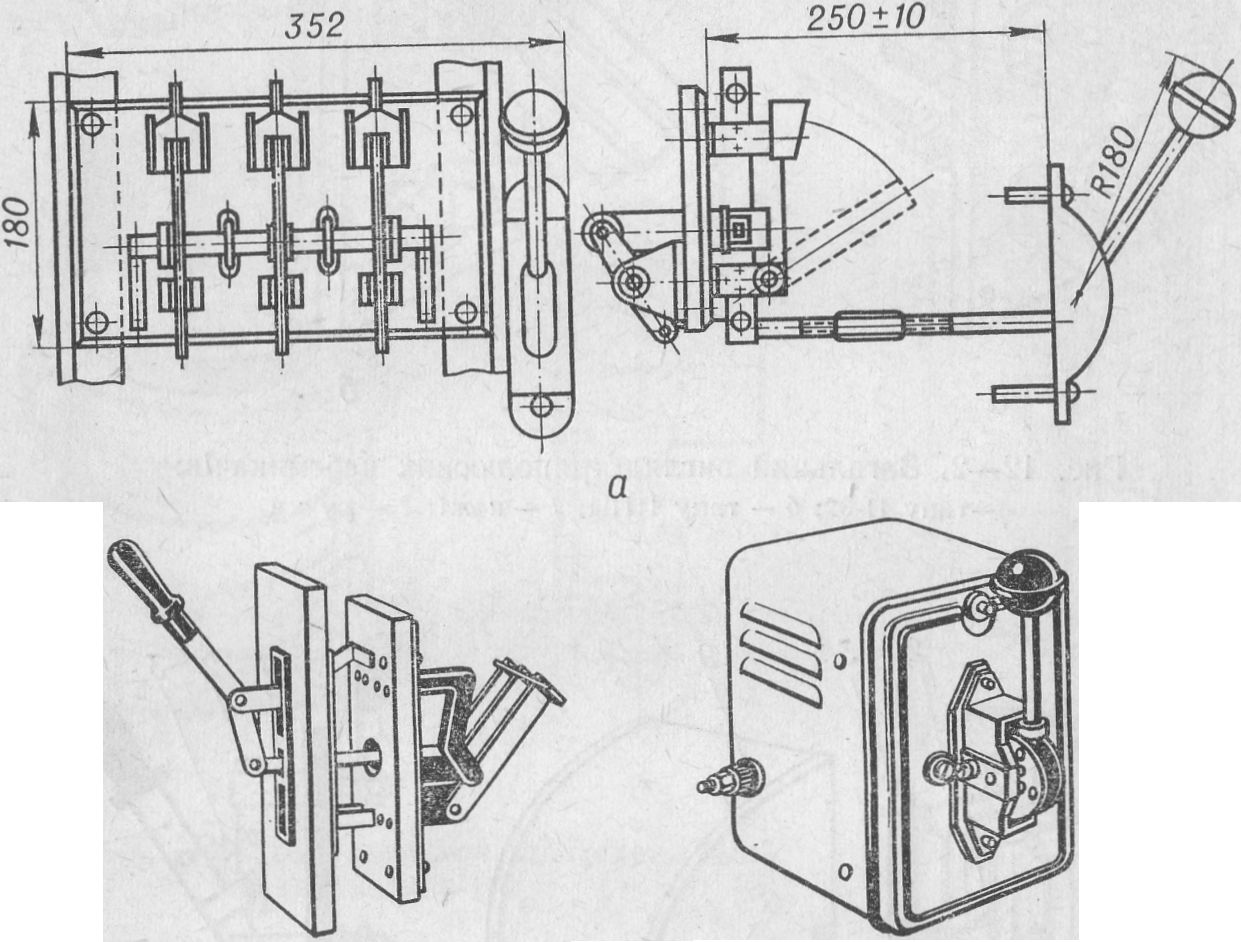
а — з бічним приводом РПБ-31; б — з центральним важільним приводом РПЦ; в —в стальному кожусі з важільним приводом
розміщені в латунних пружинних контактних губках 2 і замикають верхні та нижні планки 6 і 8, до яких болтами прикріплені підвідні проводи. Увесь апарат змонтований на шиферній або мармуровій плиті 1. Кожухом 9 апарат закривається так, що ручка 3 залишається назовні.
При розмиканні кола струму між ножами 7 і щітками контактних губок 2 виникає електрична дуга, що оплавляє їх. Щоб зберегти рубильник, треба розривати дугу якомога швидше. Для цього роблять рубильники з відривними і моментними ножами (рис. 12—3, б). Відривний ніж 4 з’єднаний пружиною 3 з моментним
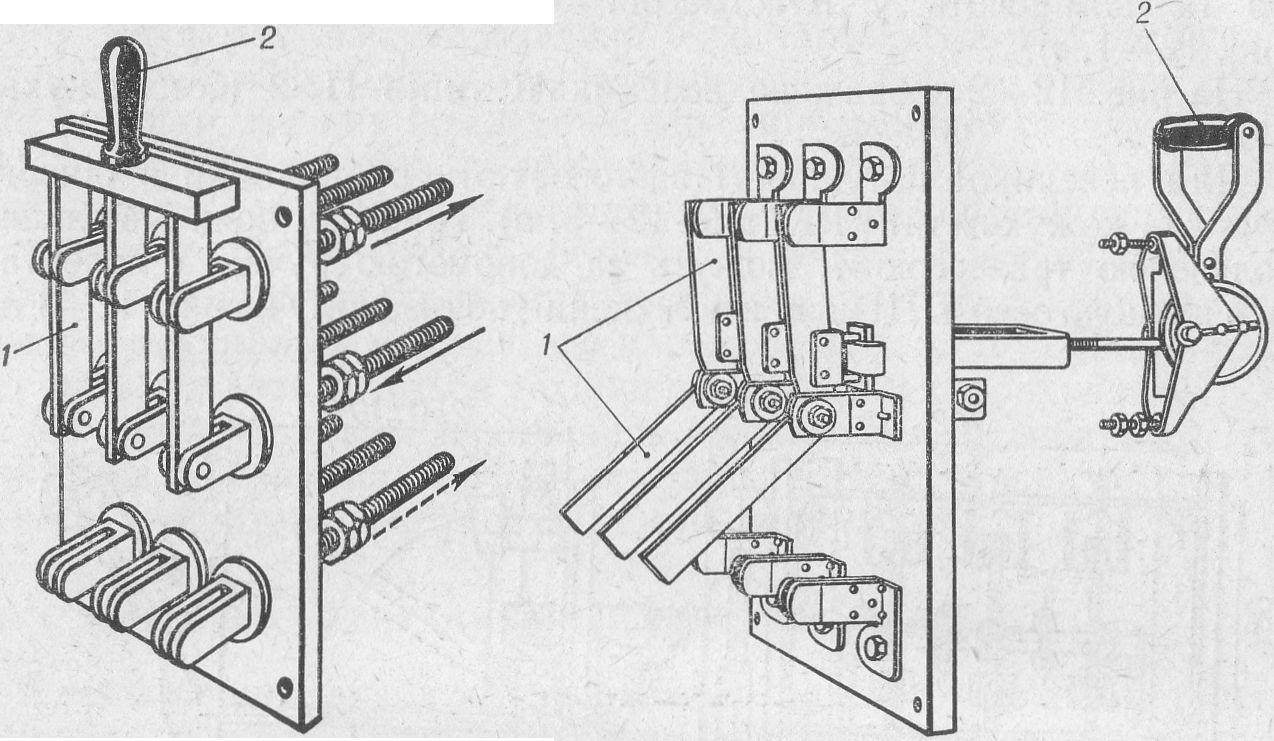
Рис. 12—2. Загальний вигляд триполюсних перемикачів: а—типу П-32; б — типу ППЦ; / — ножі; 2 — ручки.
Рис.
12—3.
Рубильники:
а
— типу PK;
б
— з відривними і моментними ножами.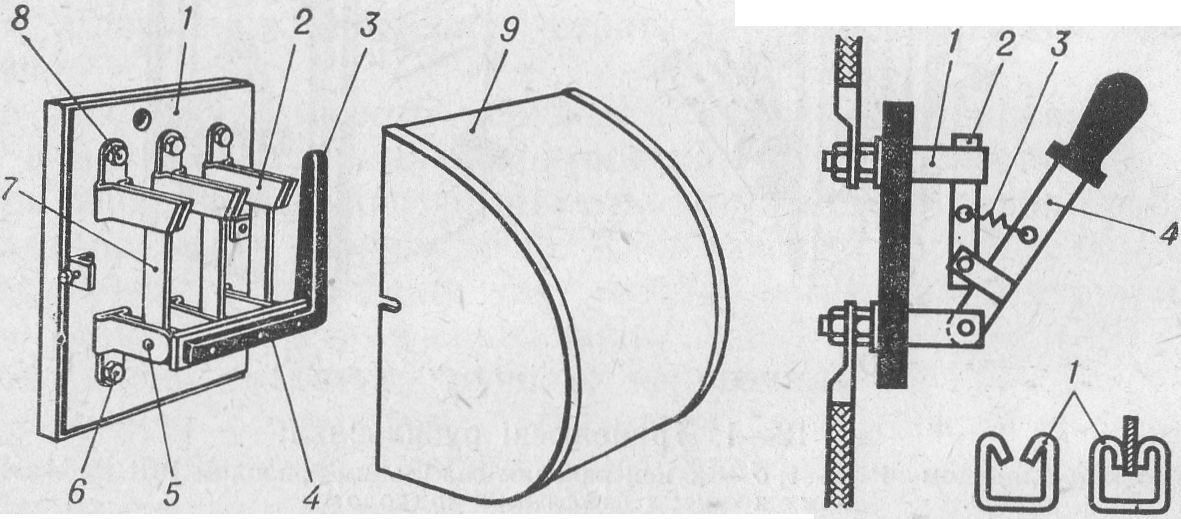
ножем 2. Коли коло вимикають, ножі 4 виходять з контактних губок 1, а ножі 2 залишаються в них. При натягуванні пружини З вона швидко відриває ножі 2 від контактів 1, і електрична дуга гасне.
Пакетні вимикачі і перемикачі. Пакетні вимикачі і перемикачі широко використовуються як пускачі для асинхронних двигунів невеликої потужності з робочою напругою 380/220 в на струми до
100 а і допускають до 300 вимикань на годину. Бувають вони відкриті, захищені і герметичні. За кількістю полюсів вони бувають одно-, дво- і триполюсні. Позначають їх так: ПВ1-10; ПВ2-60; ПВЗ-10; ПП2-10/Н2; ППЗ-100/Н2 і т. д. Позначення типів пакетних вимикачів і перемикачів розшифровують так: перша літера П — пакетний, друга В або П — вимикач або перемикач, перша цифра після літер — кількість полюсів, число після дефіса — номінальний струм вимкнення, літера H після дробу — напрям, цифра після літери H — 2~—/3 кількість напрямів.
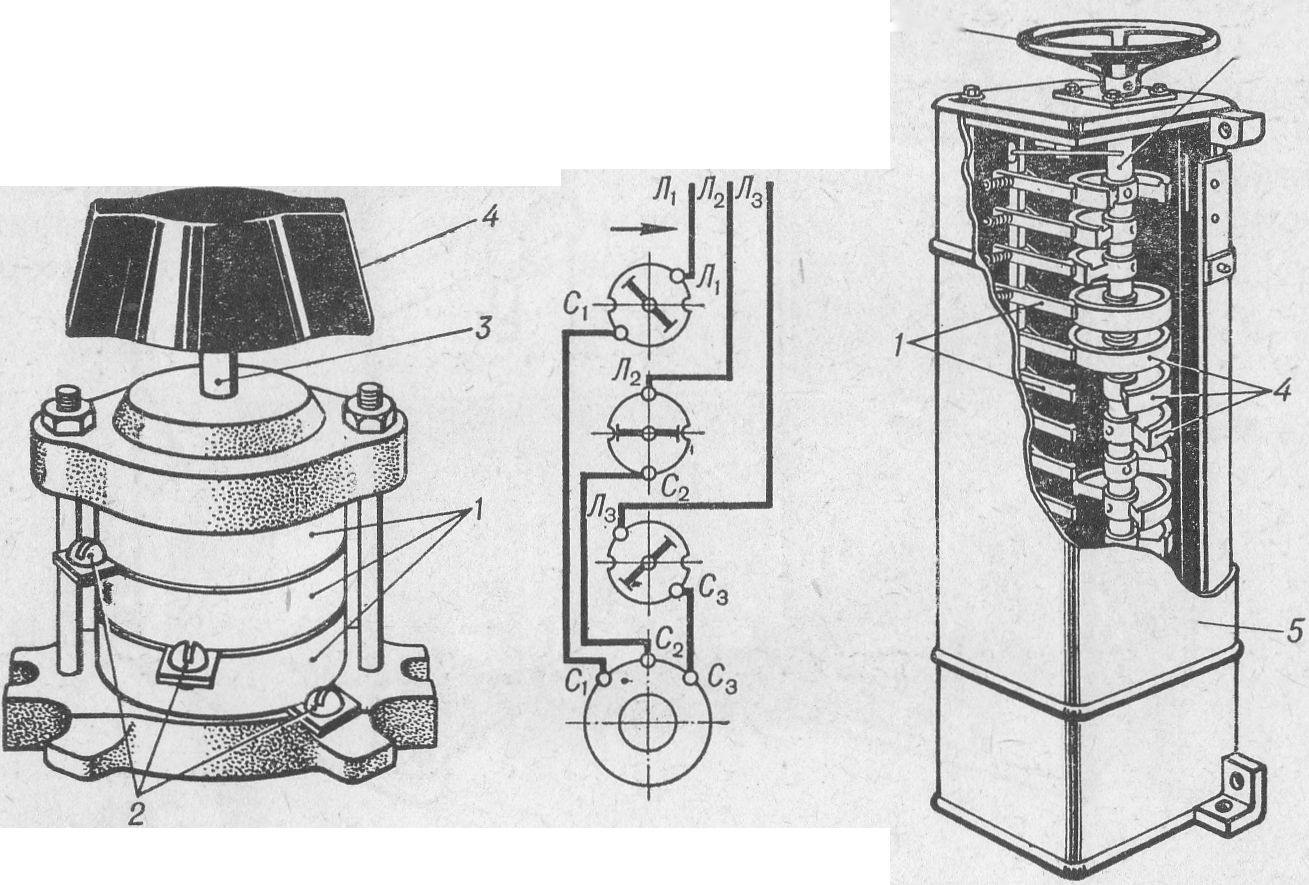 Рис.
12—4.
Пакетний
вимикач (а) і схема вми- Рис. 12—5.
Контролер
Рис.
12—4.
Пакетний
вимикач (а) і схема вми- Рис. 12—5.
Контролер
кання двигуна (б). барабанний.
Трифазний пакетний вимикач (рис. 12—4, а) складається з трьох ізолювальних дисків (пакетів) 1, які мають по два нерухомі контакти 2. До трьох із цих контактів приєднують проводи мережі JI1, Лі, JI3 (рис. 12—4, б), інші три сполучають з двигуном. Пакети різних фаз різняться тільки положенням нерухомих контактів у пазах ізолюючих дисків і розміщені на валику 3. На дисках є рухомі контакти, насаджені на валик 3. При повертанні рукоятки 4 на 90° вони повертаються і замикають або розмикають нерухомі контакти.
В одній площині з нерухомими контактами міститься іскрога- сильна фіброва шайба. Стикаючись з електричною дугою при вимиканні кола струму, фібра, розкладаючись, виділяє водень і вуглекислий газ, які гасять дугу.
Особливістю пакетних вимикачів є те, що вони мають механізм миттєвого розривання кіл і тому швидкість вмикання, вимикання і перемикання контактів не залежить від швидкості обертання ручки.
Контролери. Контролерами називають перемикачі барабанного (рис. 12—5) або кулачкового типу, які призначені для пуску, регулювання швидкості і зміни напряму обертання двигунів різних потужностей. Барабанні контролери застосовують при кількості вмикань до 240 за годину, а кулачкові — до 600 за годину.
Рухомі контакти контролера — сегменти 4 — обертаються разом з барабаном при обертанні маховичка 2, закріпленого на валі барабана. При цьому сегменти вимикають (шунтують) секції реоста-
Рис.
12—6.
Пускові
реостати:
а
— з повітряним охолодженням; б
— з масляним охолодженням типу ПР.
а
б

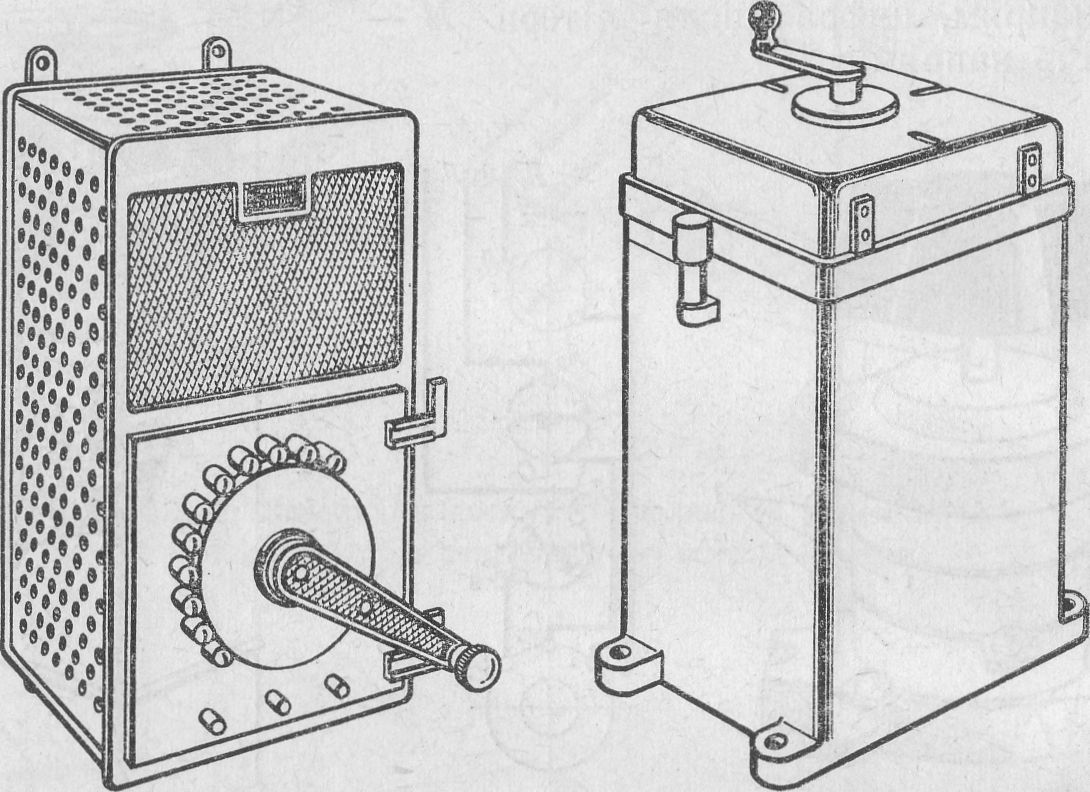
та в колі керованого двигуна. Внаслідок цього струм у колі двигуна, а отже, і його швидкість, змінюватимуться. Контролер вмонтовують у спеціальний кожух 5 і кріплять болтами у вертикальному положенні.
Контролери широко застосовують у трамваях, тролейбусах, електровозах, кранах і т. д.
Пускові і регулювальні реостати. Пускові реостати призначені для пуску двигунів постійного струму, а також асинхронних двигунів змінного струму з фазним ротором.
Пускові реостати використовують тільки для пуску, а для регулювання швидкості обертання двигунів вони непридатні, бо під час тривалого проходження струму перегріваються. Регулювальні реостати розраховані на тривале проходження струму, потрібного для двигуна. Охолодження реостатів буває повітряним і масляним.
Пускові реостати (рис. 12—6) бувають рідинні, дротяні і з литими чавунними опорами. Дротяні реостати виготовляють з окремих
дротяних опорів, намотаних на ізолювальні пластини або керамічні циліндри, що монтуються в металевому кожусі. Кінці від окремих ділянок опору виводять назовні і приєднують до закріплених на кожусі затискачів, по яких ковзає перемикаючий повзун (рис. 12—6, а).
Реостати з чавунними литими опорами мають вигляд наповненого трансформаторним маслом бака, в який опускають елементи опору. На рис. 12—7 зображено зовнішній вигляд ящика опорів серії ЯС, складеного з окремих чавунних елементів.
Апаратура автоматичного керування поділяється на командні апарати, реле і контактори. До командних апаратів належать кнопки керування і командоконтролери. Ці апарати призначені для подавання первинного імпульсу — команди в автоматизовану схему електропривода.
Рис.
12—7.
Ящик
опорів серії ЯС.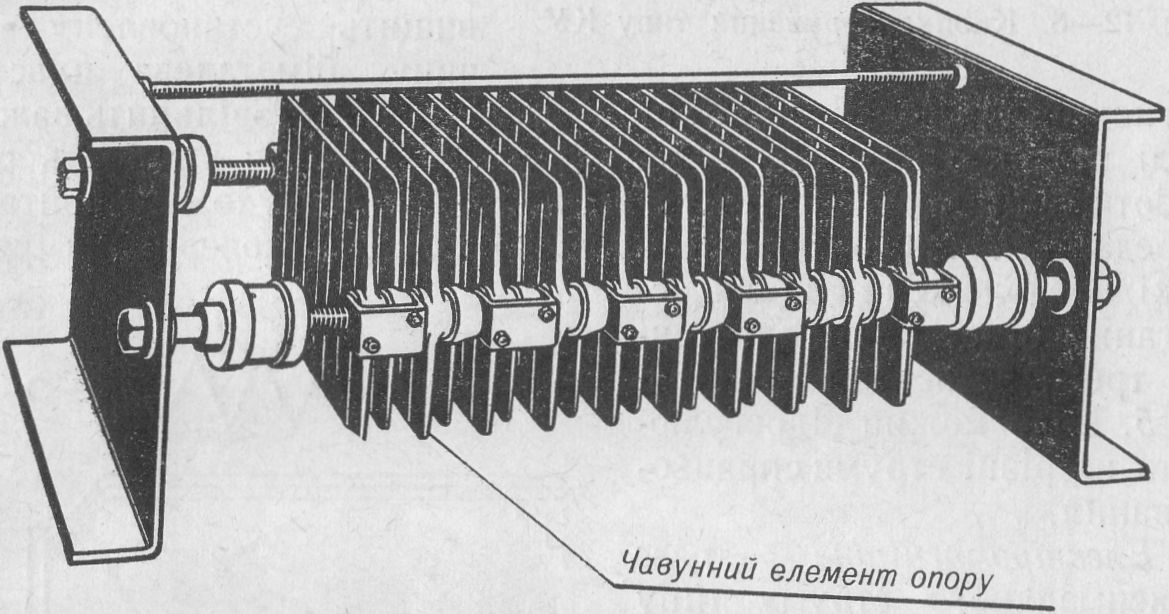
Кнопки керування відрізняються одна від одної кількістю та конструкцією контактів і натискних пристроїв, а також конструкцією захисної оболонки. Командоконтролери також відрізняються один від одного кількістю і конструкцією контактів. Контакти командних апаратів розраховані на малий струм кіл керування.
На рис. 12—8 зображено зовнішній вигляд кнопки керування (кнопочна станція) типу КУ. Вона має один нормально відкритий (HB) і один нормально закритий (НЗ) контакти місткового типу, електрично між собою не сполучені. Положення контактів змінюють кнопками «Пуск» і «Стоп». Кнопкові елементи мають спільний кожух.
Реле. Реле є основними апаратами в схемах автоматизованого електропривода, які за допомогою малих струмів керують роботою електричних установок, що споживають великі струми. Вони мають нормально відкриті або закриті контакти, увімкнені в коло керування. Залежно від різних фізичних факторів реле замикають або
розмикають свої контакти, здійснюючи перемикання в колах керування автоматичних схем. Існує величезна кількість різних типів
і конструкцій реле: механічні, теплові, електромагнітні та ін. В автоматизованому електроприводі поширені теплові та електромагнітні реле.
о—VVvVv—°
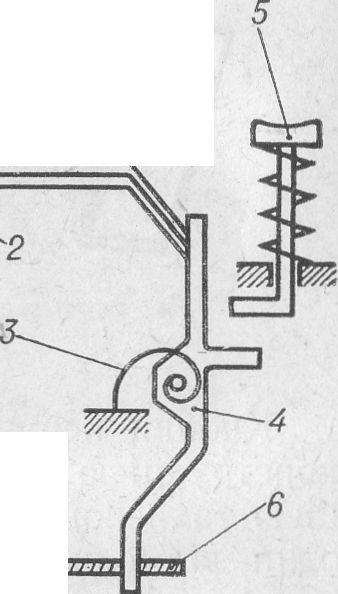

Електромагнітне реле максимального струму типу «ЭТ» показано на рис. 12—10.
O——
ί°
CE
E
Lrl
Рис.
12—9.
Схема
теплового реле.

Контактори і магнітні пускачі. Контактори призначені для автоматичного і дистанційного керування електричними установками з напругою до 500 в. Сучасні контактори витримують до 20 млн. вимикань, розриваючи струми 100—600 а за дуже короткий час —
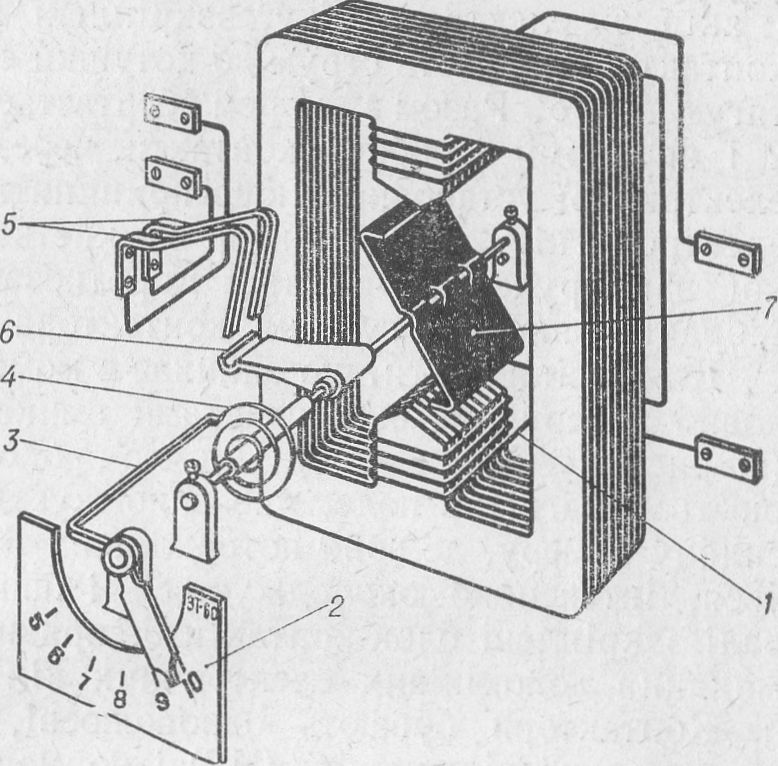 0,04—0,1
сек.
0,04—0,1
сек.
Рис.
12—10.
Реле
максимального струму.
Безпосередньо на ній закріплені нерухомі контакти 5, сердечник електромагніту і його котушка 5. Рухомі контакти 2, до яких підходять гнучкі провідники 1
Рис.
12—11.
Триполюсний
контактор змінного струму.
І
ЛІ,
лг
N
W j

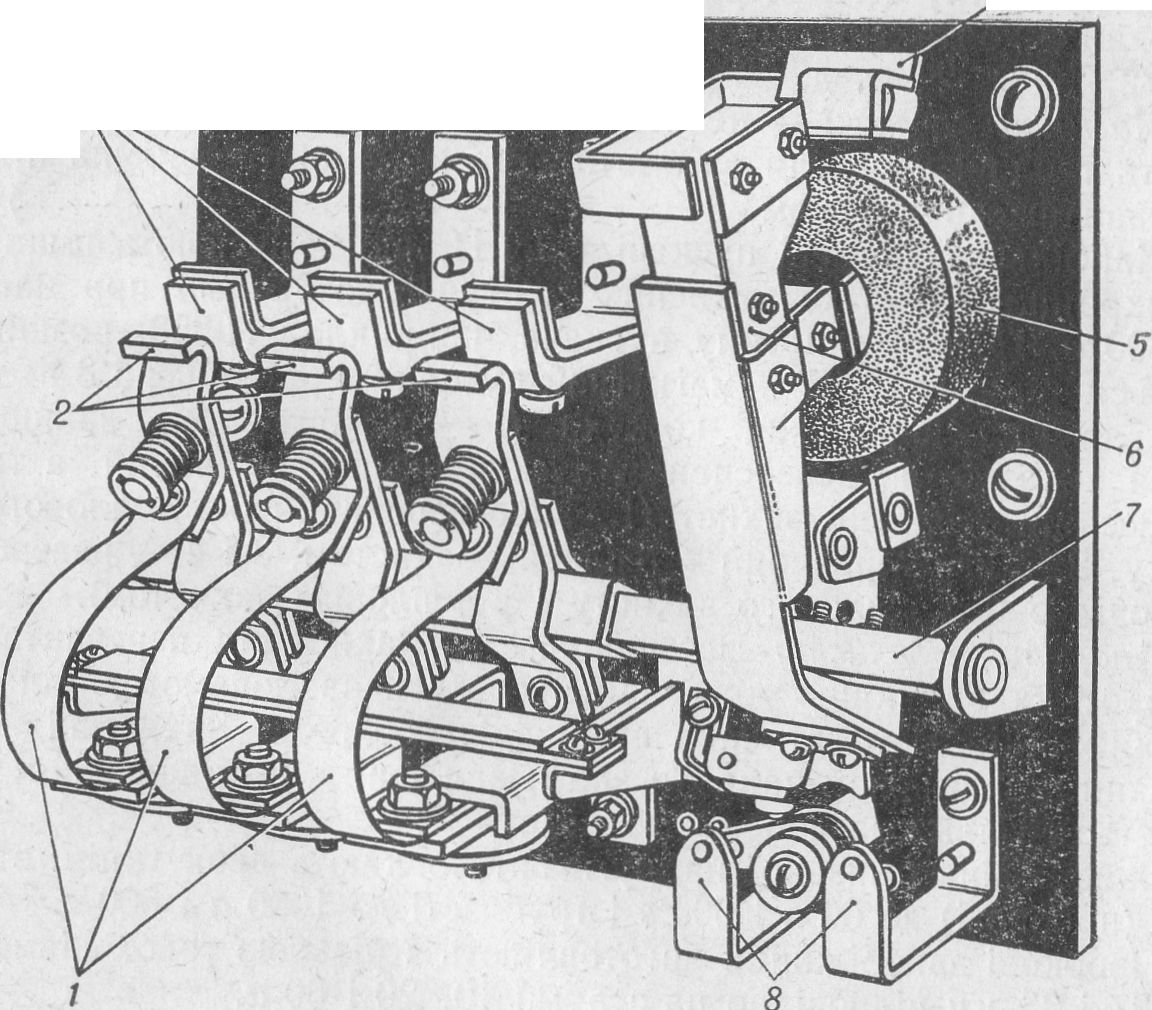

якір 6 електромагніту, закріплені на валі 7. Для вмикання контактора подають струм до котушки електромагніту 5, який притягує якір 6. Разом з якорем обертається вал 7, що замикає рухомі
і нерухомі 3 робочі контакти, через які струм іде від сітки до електричної установки. Якщо припинити подачу струму до котушки електромагніту, то контактор вимкнеться під дією пружини і власної ваги рухомих частин. Короткозамкнений виток 4 зменшує вібрацію якоря і гудіння контактора під час роботи.
Для гасіння дуги, що виникає в момент розмикання кола, послідовно з нерухомими контактами вмикають дугогасильні котушки (на рисунку не показано). Під час проходження по них струму створюється магнітне поле, яке видовжує дугу і виштовхує в дугогасильну камеру, де вона потрапляє на металеву решітку, подрібнюється, інтенсивно охолоджується і швидко загасає. Праворуч на валі закріплені блок-контакти 8, призначені для замикання і розмикання допоміжних електричних кіл.
Контактори бувають однополюсні, двополюсні і триполюсні
нормально відкритими (HB) і нормально закритими (НЗ) головними контактами. Нормальним станом контактів є такий, при якому струму в котушці керування немає. Випускають контактори на змінний струм типів KT з переднім і заднім приєднанням проводів і типу КТЭ — тільки з заднім приєднанням проводів і на постійний струм типу КП. Перша цифра після літер показує кількість головних контактів, друга — величину (всіх п’ять), наприклад, КТ-32, КТЭ-32 і т. д.
Магнітні пускачі — це ті самі контактори, які звичайно ще мають теплові реле для автоматичного вимикання двигуна під час перевантажень струмом.
Найбільш поширені пускачі типу П, які допускають вмикання асинхронних короткозамкнених двигунів до 75 кет при напрузі до 500 в. Позначення типу пускача, наприклад П-322, розшифровується так: літера П — магнітний пускач, перша цифра 3 — габарит, друга — виконання кожуха (1 — відкрите, 2 — захищене), третя показує, чи реверсивний пускач чи нереверсивний, а також чи має він тепловий захист (1 — нереверсивний без теплового захисту, 2 — нереверсивний з тепловим захистом, 3 і 4 — реверсивні відповідно без теплового захисту і з тепловим захистом).
Апаратура захисту електропривода. Захист від перевантажень і коротких замикань може здійснюватись за допомогою плавких запобіжників, автоматичних вимикачів або реле. Захист від перегрівання, зникнення напруги або її зниження чи підвищення здійснюється тільки за допомогою реле.
Запобіжники низької напруги виготовляють двох типів: з різьбою (пробкові) до 60 а і 500 в і трубчасті до 1000 а і 500 в.
Пробкові запобіжники виготовляють з різьбою трьох діаметрів: 14, 27 і 33 мм відповідно на струми 10, 20 і 60 а.
Трубчасті запобіжники бувають кількох типів. Ix поділяють
-V-
І"1
І
»
;
4-
ΊΓ
І
!
*! 4і
V
-И
і і
t! І
І
ί
і
'
J=U
*:
H— 11
V
t
і
Рис.
а
12—12.
Трубчасті
запобіжники:
а
— типу НПР; б
—
типу ПР.
на
дві основні групи: з струмообмеженням
і без струмообмеження.
Запобіжники
з струмообмеженням — де такі, в яких
після розплав-
лення плавкої вставки
струм швидко зменшується до нуля.
Для
цього в трубчастому запобіжнику
є сухий кварцовий пісок, який
швидко
охолоджує дугу, що й приводить до різкого
зменшення
струму короткого замикання.
У
запобіжників без струмообмеження після
розплавлення плав-
кої вставки і
утворення дуги струм короткого замикання
(або струм
перевантаження)
не зменшує-
ться. Дуга гасне лише
після
підвищення тиску газів
(до
90—100
атм),
які утворю-
ються від розпаду
оболонки
запобіжника.
Нарис.
12—12,
а
показано
запобіжник із струмообме-
женням
типу НПР (запобіж-
ник розбірний з
наповнюва-
чем). Він складається з
фар-
форової трубки 1,
на
кінці
якої накручено ковпачки з
но-
жами. Усередині трубки роз-
міщено
кілька паралельних
дротинок 2
відповідних
діа-
метра і довжини. На кожній
дротинці
зроблено петельку,
на яку напаяна
олов’яна
кулька 3,
що
прискорює пе-
регоряння дротинки в
цьому
місці.
У
патроні запобіжника
розміщають 6,
8, 10 і
12
па-
ралельних
дротинок відповідно до номінальних
струмів 100,125,
160
і
200
а.
Трубка заповнена кварцовим піском.
Запобіжник пра-
цює без викидання
полум’я, безшумно.
На
рис. 12—12,
б
показано трубчастий запобіжник типу
ПР. Він
складається з фібрової трубки
5,
на
кінцях якої закріплено два
кільця
6
з
різьбою. На ці кільця накручені ковпачки
3,
які
затискують
ножі 2.
Плавка
вставка 4
(звичайно
цинкова) прикріп-
лена гвинтами до
ножів. Вставка має неоднаковий переріз.
Під час
проходження струму короткого
замикання вставка плавиться в міс-
цях
меншого перерізу. У цьому випадку
утворюється менша кіль-
кість пари
металу. Якщо плавка вставка розплавлюється
і утво-
рюється дуга, то розкладається
твердий дугогасильний матеріал
(фібра),
підвищується тиск газів, внаслідок
чого дуга гасне. Спа-
лену плавку
вставку легко замінюють новою. Запобіжники
для
двигуна електропривода добирають
так. Визначають струм плавкої


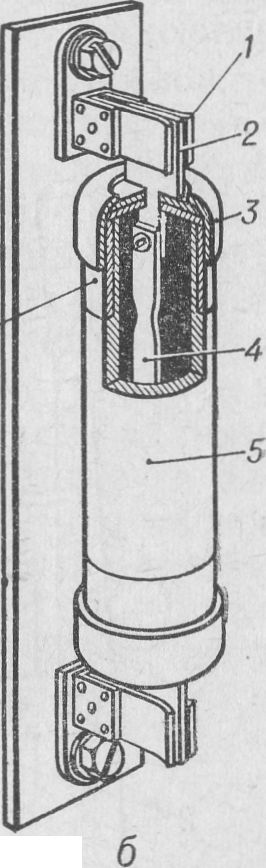
де а — коефіцієнт запасу, який ураховує тип запобіжника та характер пуску двигуна (легкий або важкий пуск) і приблизно дорівнює 2,5.
Визначають пусковий струм In, який для трифазного асинхронного двигуна з короткозамкненим ротором обчислюють за формулою:
/,і = (5 — 8) /к, (12-5)
Рис.
12—13.
Повітряні
автоматичні вимикачі:
а
— однополюсний максимального струму;
б
— однополюсний мінімальний автомат.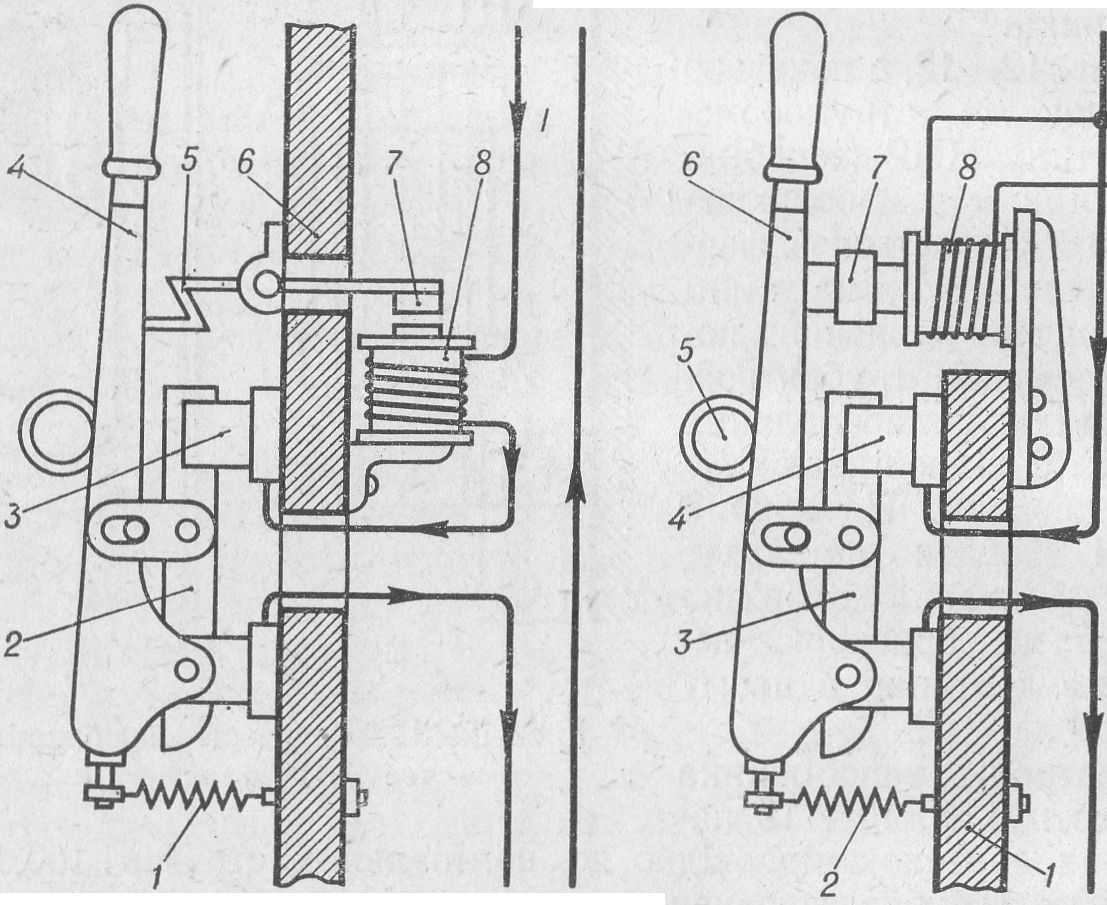
де Ih — номінальний струм двигуна, який обчислюють за формулою:
Pu ■ 1000
Ih = ГтЧ (12—6)
VzU COS φ
беручи значення номінальної потужності двигуна Ph у кіловатах, лінійну напругу — у вольтах і cos φ — з паспорта двигуна. Відповідно до обчисленого струму вставки Ie знаходять у таб
лицях довідників запобіжник на відповідний або найближчий більший струм.
Повітряні автоматичні вимикачі. Повітряні автоматичні вимикачі призначені для роботи в електричних силових установках змінного і постійного струму з напругою до 500 в. Вони автоматично розмикають електричні кола при недопустимих перевантаженнях, коротких замиканнях і зниженні напруги, а також здійснюють нечасту комутацію кіл у нормальних умовах.
Нарис. 12—13, а зображено схему автомата максимального струму. До ізолювальної плити 6 прикріплені пружинні плоскі контакти 3, в які заходить ніж рубильника 2. У робочому положенні ніж з рукояткою 4 тримає заскочка 5. Обмотка електромагніту 8 сполучена з ножем 2 послідовно. Коли струм перевищить допустиме значення, сердечник електромагніту 8 притягне якір 7, заскочка 5 звільнить рукоятку 4, яка під дією пружини 1 відхилиться вліво і розімкне коло струму. На рис. 12—13,6 показано схему мінімального автомата, який вимикає установку при зниженні або зникненні напруги.
Обмотка електромагніту 8 увімкнена на напругу сітки і тримає якір 7, укріплений на рукоятці 6. При зменшенні напруги сила притягання електромагніту зменшується і рубильник під впливом пружини 2 та вантажу 5 розмикає коло струму. Обидва автомати вмикають вручну.
Повітряні автоматичні вимикачі бувають однополюсні, двополюсні і триполюсні.
5. Схеми автоматизованого електропривода
Схему автоматизованого електропривода з реверсивним магнітним пускачем показано на рис. 12—14, яка дає змогу вмикати двигун у мережу, вимикати його з мережі і проводити реверсування.
На схемі жирними лініями зображено силове коло, а тонкими — коло керування.
Для пуску двигуна вперед вмикають рубильник IP і натискають кнопку «Вперед»; при цьому котушка контактора В живиться по такому колу: лінія Jl3—нормально замкнена кнопка «Стоп» — кнопка «Вперед» — нормально замкнений контакт H контактора «Назад» — котушка контактора В — контакти теплових реле І PT; 2РТ — лінія Jli. Контактор В замикає свої контакти в силовому колі, і ротор двигуна починає обертатись. Одночасно з головними контактами контактора В замикається його блок-контакт В, який забезпечує живлення котушки контактора В при відпущеній кнопці «Вперед».
Після пуску двигуна вперед помилкове натиснення на кнопку «Назад» не ввімкне контактора H і не спричинить зв’язаного з цим короткого замикання в схемі, бо коло контактора H буде розімк- нене допоміжним контактом контактора В.
Для
пуску двигуна назад насамперед натискують
кнопку «Стоп», що приводить до вимкнення
контактора В
і до зупинки електродвигуна. Потім
натисканням кнопки «Назад» пускають
двигун у зворотному напрямі. Котушка
ґ;
wJ=
Ґ/
Ψ
[]
0
її
П
Вперед
„ IPT
2РТ
.
. JU H
L-0|0-»0
Стоп
Bi=
IPT
[2
PT
Рис.
12—14.
Схема
сполучень реверсивного магнітного
пускача:
В
—контактор «вперед»; H
—
контактор «назад», PT
— реле теплові.
л
Рис.
12—15.
Схема
автоматизованого електропривода з
двигуном постійного струму послідовного
збудження:
JJ—лінійний
контактор: — контактор керування
контактора
H
живиться
по
такому колу: лінія JI3
—
кнопка
«Стоп» — кнопка
«Назад»— увімкнений
кон-
такт В
— котушка кон-
тактора H
—
увімкнені
контакти теплових реле
IPT
і
2РТ
— лінія JI2.
Тут
знову-таки помилкове
натискання
кнопки «Впе-
ред» не спричинить
недо-
пустимого ввімкнення кон-
тактора
«Вперед», бо це
коло буде розірване
до-
поміжним контактом H
контактора
«Назад». На-
гадуємо, що кнопки ма-
ють
механічне блокуван-
ня, тому при
одночасному
їх натисканні двигун
не
ввімкнеться.
При
перевантаженні
двигуна спрацьовує
теп-
лове реле IPT
або
2РТ.
Розмикаючи
свої контакти
IPT
або
2РТ,
вони зне-
струмлюють будь-яку
з
увімкнених котушок кон-
такторів,
і двигун зупи-
няється. Схему
автомати-
зованого електропривода
двигуном
постійного стру-
му послідовного
збуджен-
ня показано на рис. 12—15.
При
натисканні кноп-
ки «Пуск» котушка
ліній-
ного контактора вмикає-
ться
в мережу і спрацьовує, замикаючи силовий
і блокуваль-
ний контакти JI.
У
колі нерухомого якоря двигуна виникне
постій-
ний струм, величина якого
обмежуватиметься пусковим реостатом
R
і
R
2*
У
перший момент пуску напруга на котушках
контакторів керу-
вання IKK
і
2КК
мала,
оскільки вона визначається тільки
спадом








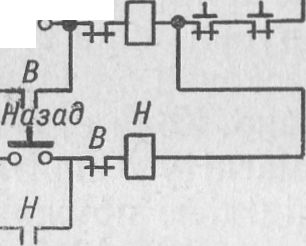
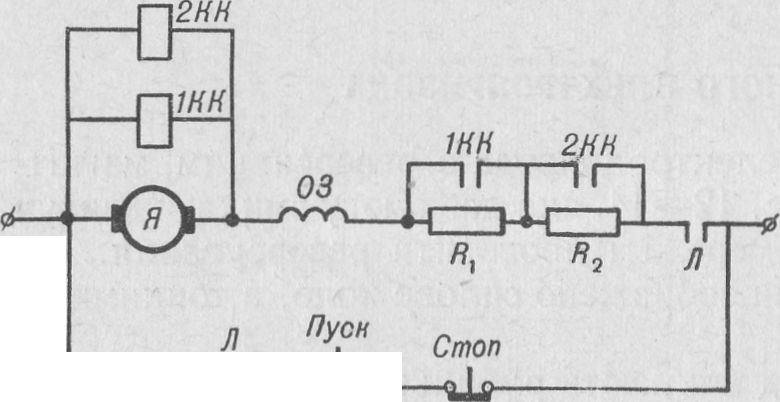
напруги в нерухомому якорі, опір якого дуже малий. У міру збільшення швидкості обертання двигуна відповідно збільшується про- тиелектрорушійна сила в обмотці якоря. Разом з нею збільшується і напруга на котушках контакторів керування. Коли напруга на щітках двигуна досягне величини, достатньої для спрацьовування першого контактора керування 1КК, він своїми силовими контактами закоротить першу секцію R1 пускового реостата, що різко збільшить струм у колі якоря двигуна і прискорення. Коли шви- кість якоря досягне значення, при якому напруга на щітках машини (яка визначається величиною проти-е. р. с.) дорівнюватиме напрузі спрацьовування другого контактора керування 2КК, він також замкне свої контакти і зашунтує другу секцію R2 пускового реостата. Двигун набере нового прискорення і обертатиметься з постійною швидкістю, що визначається навантаженням на його валі. Зупиняють двигун кнопкою «Стоп».
ВИРОБНИЦТВО, ПЕРЕДАЧА І РОЗПОДІЛ ЕЛЕКТРИЧНОЇ ЕНЕРГІЇ
13—1. ТИПИ ЕЛЕКТРИЧНИХ СТАНЦІЙ
Електростанція — це підприємство, призначене для вироблення електричної енергії. Енергетичне господарство Радянського Союзу, як і всіх країн світу, розвивається на базі використання всіх наявних енергетичних ресурсів (тверде, рідке і газове паливо, гідроенергетичні ресурси, енергія вітру і сонця, атомна енергія).
Загальносвітові енергетичні ресурси кам’яного вугілля становлять приблизно 3600 млрд. т або 21,8 · IO15 кет ■ год електроенергії; бурого вугілля — 1200 млрд. т або 1,8 · IO15 кет ■ год; нафти — 260 млрд. т або 3,2 · IO15 кет ■ год; горючого газу — 16000 млрд. м3 або 0,2 · IO15 кет · год електроенергії. З цієї кількості в Радянському Союзі зосереджено близько 50% кам’яного і бурого вугілля, до 20% нафти і понад 10% горючого газу. Водна енергія CPCP тільки великих і середніх річок може забезпечити щорічне виробництво електроенергії в кількості, що перевищує 1700 млрд. кет ■ год.
Світові запаси найбільш досліджених розщеплюваних матеріалів становлять: урану — 25 млн. т або 500 ■ 10і* кет ■ год; торію—1 млн т або 20 ■ IO15Kem · год.
Енергія, яка виділяється при розпаді 1 кг урану, дорівнює 18—20 млрд. ккал, тобто в 2,6—2,8 млн. раз більше від теплотворності доброго кам’яного вугілля.
Таким чином, світові запаси розщеплюваних матеріалів, переведених на кількість можливого вироблення електроенергії, вищі за всі світові паливні запаси майже в 20 раз.
Ось чому питома вага атомних електростанцій у загальному балансі виробництва електроенергії весь час зростає. Немає сумніву, що електроенергетика майбутнього буде електроенергетикою атомною.
Залежно від виду енергії, яка перетворюється в електричну, розрізняють три основні типи електрич-
них станцій: теплові (ТЕС), гідростанції (ГЕС) і атомні (AEC) електростанції.
Безпосереднє перетворення сонячної енергії в електричну на геліоелектростанціях поки що не вийшло за рамки експериментів. Вітрові та інші електростанції (геотермічні — на підземному теплі, приливні — на енергії морських приливів) не відіграють помітної ролі в сучасній електроенергетиці. Тому докладно опишемо процеси роботи і структуру обладнання тільки теплових, гідравлічних і атомних електростанцій.
Теплові станції. Технологічний процес теплової електростанції (пиловугільної) відбувається за такою схемою (рис. 13—1).
Паливо у вагонах 1 через вагу надходить у розвантажувальний пристрій 2, з якого транспортними механізмами а або б транспортується на вугільний склад 3 або в котельню. Із складу в котельню паливо можна подавати і транспортерами.
На шляху в котельню вугілля проходить через дробильну установку 4, в якій подрібнюється в окремі кусочки розміром 10—20 мм. Транспортерами в подрібнене вугілля подають у бункери сирого вугілля котельної 5, а потім у вугільні млини 6.
Вугляний пил з млинів відсмоктується ексгаустерами 7 (відсмоктуючий вентилятор) і подається в топку 8 котельного агрегату. Гарячі гази, які тут утворюються, омивають поверхні нагріву котельного агрегату: кип’ятильні трубки 9, пароперегрівник 10, водяний економайзер 11 і повітропідігрівник 12. Після золовловлювача 13 гази димососом 14 видаляються в атмосферу через димову трубу 15.
Повітря, яке потрібне для горіння, подається нагнітальним вентилятором 16 через повітропідігрівник у топкову камеру.
Шлаки, що випадають з топкової камери, і зола, яка збирається під повітропідігрівником та золовловлювачем, відводять звичайно за допомогою води по каналах або трубах г в установку золовидалення 17 і потім на золові відвали.
Перегріта пара з котельного агрегату паропроводом д через водовідділювач 18 підводиться до турбіни 19. У турбінах енергія пари перетворюється в механічну, а потім у генераторі 33, розташованому на одному валі з турбіною, — в електричну енергію, звідки й надходить на шини розподільного пристрою станції.
Конденсат турбіни з конденсатора 20 конденсатним насосом 21 через регенеративні допоміжні підігрівники низького тиску 22 подається в деаератор 23, який призначений для видалення газів з живильної води котлів. Потім насосами 24 через підігрівники високого тиску 25 вода подається по трубах е у водяний економайзер котельного агрегату 11 і далі по трубі 2 в котел.
Втрати пари і конденсату на станції поповнюються хімічно очищеною водою, яка подається насосами 26 через очищувальні апарати 27 по трубах Ж в деаератор 23.
Для охолодження конденсаторів турбін насоси 28 подають воду з каналу 29, після чого підігріта вода зливається в канал ЗО.
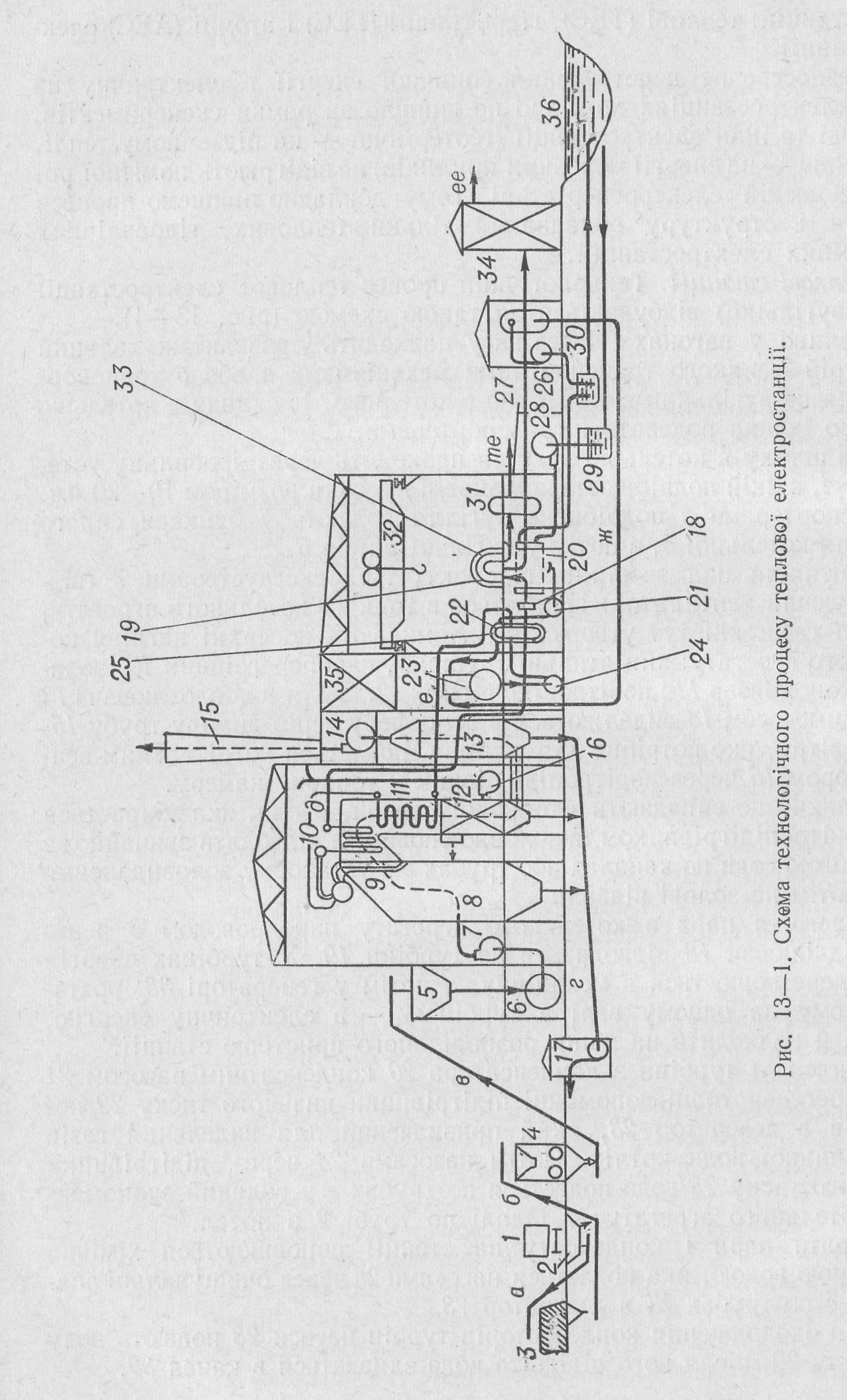
Пара від турбіни підводиться до установки 31, з якої за допомогою теплоносія (пари або гарячої води) подається до споживачів теплової енергії те.
До споживачів електрична енергія надходить через головний електричний розподільний пристрій 34 (звичайно через підвищувальну підстанцію). Для власних потреб станції енергія подається через розподільний пристрій власних потреб 35.
На рисунку зображено також джерело водопостачання (річка, озеро) 36, яке сполучене з каналами 29 і ЗО.
Теплові станції поділяються на станції з паровими турбінами (найбільш поширені) і станції з двигунами внутрішнього згоряння. Якщо паротурбінна електростанція виробляє тільки електричну енергію, вона називається конденсаційною (КЕС), якщо вона одночасно виробляє електричну і теплову енергію, то — теплоелектроцентраллю (ТЕЦ). На сучасних теплових паротурбінних електростанціях питома витрата палива становить 0,34—0,31 кг/квт ■ год, а їх к. к. д. досягає 36—40%. К. к. д. ТЕЦ досягає 60%. Понад 80% усієї електроенергії виробляють теплові електростанції.
Гідроелектричні станції (ГЕС). Комплексна силова установка, яка перетворює енергію руху водних джерел в електричну енергію, називається гідроелектричною станцією (ГЕС). Залежно від геологічних умов місцевості ГЕС поділяють на г р е- бельні і дериваційні.
На гребельних гідростанціях упоперек русла річки споруджують греблю, яка утворює потрібний підпір H рівня води. Така ГЕС має машинне приміщення, в якому встановлюють гідрогенератори, головний пульт керування, шлюзи для пропускання суден і допоміжні споруди. На рис. 13—2 показано поперечний переріз гребельної ГЕС. Вода з верхнього б’єфа, створеного греблею 1, надходить у спіральну камеру 15, а потім на лопаті турбіни 14 і робоче колесо турбіни 13, де кінетична енергія води перетворюється в механічну енергію. Спрацьована вода через всмоктувальну трубу 11 іде в нижній б’єф річки. Всмоктувальна труба створює під турбіною розрідження, що сприяє збільшенню потужності і к. к. д. станції. Турбогенератор 17 вертикальним валом з’єднують з турбіною. У машинному залі станції 8 установлено мостовий кран 7. Для грубої фільтрації води призначена решітка 2, яка чиститься механізмом 4, а бруд відводить назовні лотік 3.
На період ремонту в пази 12 і 16 за допомогою кранів 9 і 6 закладають щити (шандори) 5 і 10, які припиняють надходження води в турбіну.
Потужність турбіни вручну і автоматично регулюють поворотом лопаток напрямного і робочого коліс.
Дериваційні ГЕС будують звичайно на річках у гірській місцевості. Ix особливість полягає в тому, що вода з русла річки до турбін підводиться по обхідних водоводах, які утворюють напір біля турбінної установки.
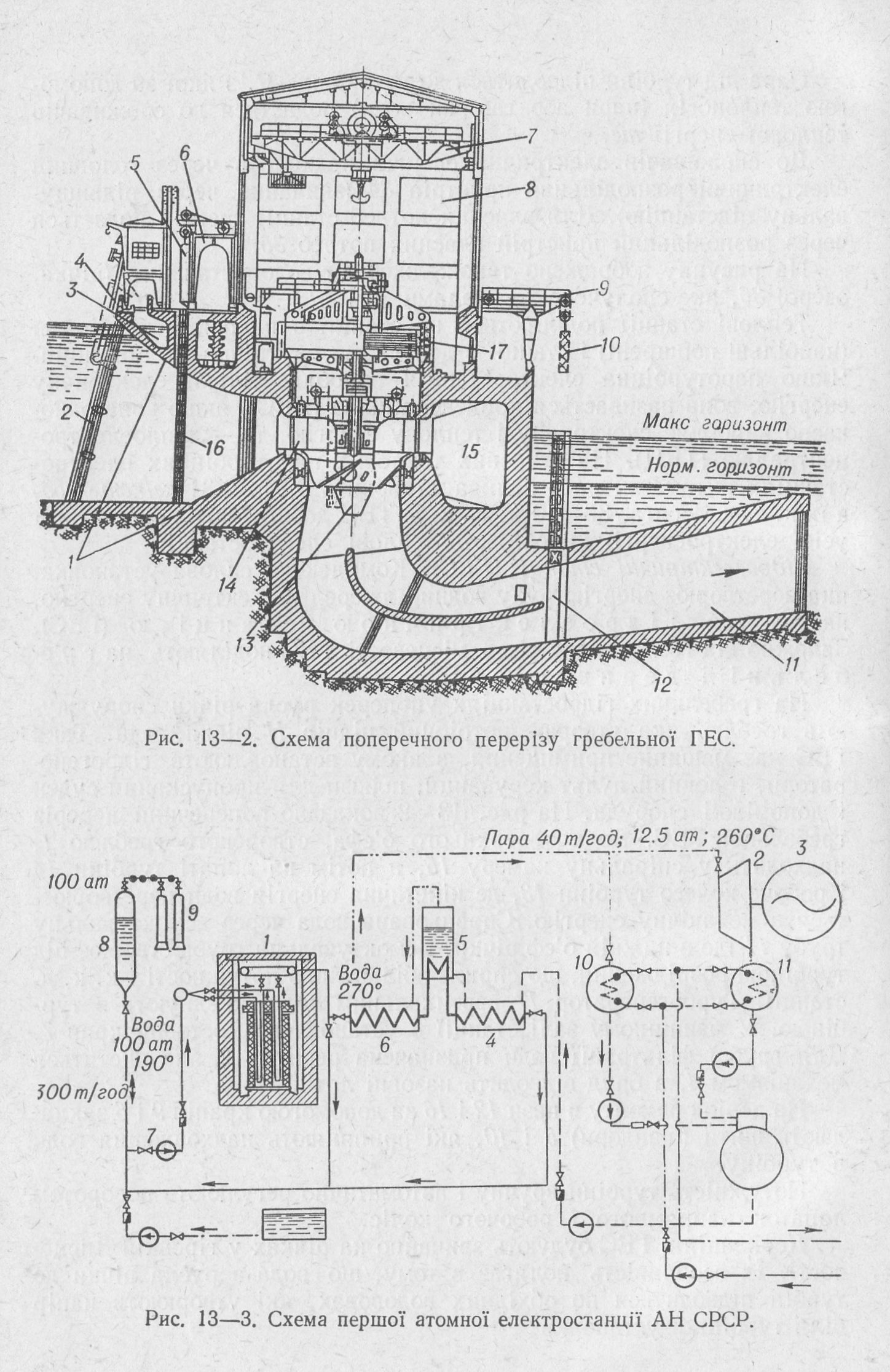
Атомні електростанції (AEC). Першу в світі атомну електростанцію потужністю 5000 кет введено в експлуатацію в CPCP у 1954 р. Схему її показано на рис. 13—3. Основною частиною станції є атомний реактор 1. У цей реактор завантажують 550 кг урану-238, збагаченого до 5% ураном-235. При розщепленні ядер урану-235 повільними нейтронами частинки ядер, рухаючись з величезними швидкостями, при стиканні з ядерним «пальним» або з уповільнювачами руху передають їм частково свою енергію, внаслідок чого температура в реакторі значно підвищується. Між урановими стержнями для регулювання реактора рівномірно розміщують стержні з карбідом бору. При їх опусканні активність реактора знижується і може бути зовсім припинена. Для захисту від радіоактивного випромінювання навколо реактора є шар води завтовшки до 1 м, бетонна стіна завтовшки до 3 ж і чавунна стіна завтовшки 0,25 м.
Коли збагачення природного урану-238 розщеплюваним ураном- 235 зменшиться до 4%, уранові стержні змінюють, заново збагачуючи їх на відповідних підприємствах.
Під час роботи реактора частина урану перетворюється на плу- тоній-239, який також застосовується як ядерне «пальне».
Щоб забезпечити безпосередній догляд за турбогенератором і турбіною, на атомних електростанціях застосовують двоконтурну теплову схему, за якою нагріта під тиском в атомному реакторі вода використовується як теплоносій для вироблення водяної пари в пароутворювачах поверхневого типу. Після пароутворювача пара не заражена радіоактивністю, тому парові турбіни, до яких подається пара другого контура, може безпосередньо доглядати обслуговуючий персонал.
Теплова потужність атомного реактора на першій атомній електростанції AH CPCP дорівнює ЗО 000 кет, що забезпечує при відповідних параметрах робочої пари (12,5 атм, 260° С) потужність турбогенератора 2 і 3 в 5000 кет. Вода в реакторі, що циркулює в першому контурі, нагрівається до температури 270° — 280° під тиском 100 щпм.
Після пароутворювача другого контура (підігрівник — 4, випарник — 5, перегрівник пари — 6) охолоджена вода (теплоносій) з температурою близько 190° знову подається в реактор. Тиск води в першому контурі забезпечується живильним насосом 7, вирівнювачем тиску 8, тиск в якому підтримується газовими балонами високого тиску 9. У другому контурі передбачено дві конденсаторні установки: 11 — для конденсації пари після турбіни і 10 — пусковий конденсатор.
При навантаженні 5000 кет станція витрачає ЗО г урану за добу.
Сучасні атомні електростанції поки що мають низький к. к. д.— 25—30%.
Комутаційна апаратура високої напруги призначена для вмикання і вимикання генераторів, трансформаторів, ліній електропередач тощо. При вимиканні електричного кола між контактами вимикаючого апарата виникає електрична дуга, яка нагріває і псує контакти. Особливо тяжкі умови виникають для вимикаючого апарата при розриві ним кола в аварійному режимі, при короткому замиканні, коли струми набагато перевищують нормальні значення.
Рис.
13—4.
Вимикач
горшковий типу ВМГ-133, 6—10
кв,
400—1000
а.
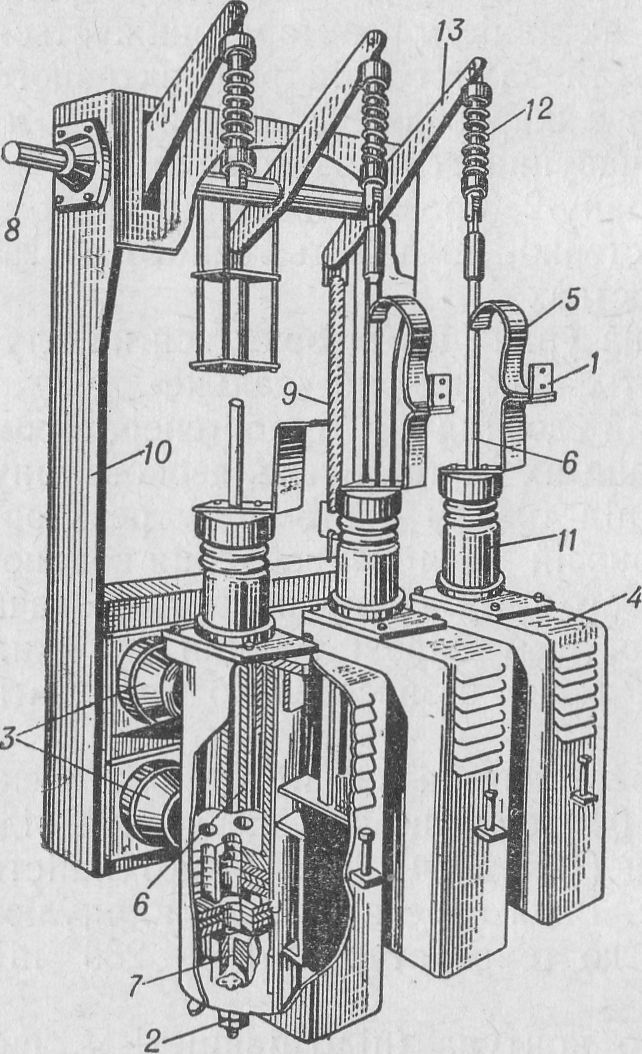
Вимикачі. Високовольтним вимикачем називають апарат, призначений для вмикання і вимикання електричного кола напругою понад 500 в під струмом навантаження. У конструкції вимикачів передбачено також автоматичне вимикання електричного кола під час коротких замикань. За принципом дії такі вимикачі поділяють на масляні і повітряні.
У масляних вимикачах основні контакти, що розмикають головне коло, розміщують у маслі, яке є ізолятором і гасить дугу. Масляні вимикачі поділяють на бакові (з великим об’ємом масла) і горшкові (з малим об’ємом масла).
Безмасляні вимикачі бувають: автогазові, повітряні з стисненим повітрям та ін. Усі вимикачі приводяться в дію вручну і автоматично.
Бакові вимикачі важкі. Вони потребують великої кількості масла і вибухонебезпечні, тому їх тепер установлюють рідко.
Найпоширенішим типом вимикачів в CPCP є горшкові малома- сляні вимикачі, які безпечніші щодо вибуху, легші і менші за бакові.
На рис. 13—4 показано трифазний вимикач горшкового типу ВМГ-133 на 6—10 кв і 400—1000 а, які випускають для внутрішнього встановлення.
Щоб увімкнути такий вимикач спеціальним приводом, звичайно електромагнітним, повертають вал 8, разом з яким повертається коромисло 13. Кінець коромисла через ізолятор 12 тисне на кінець стержня 6 (рухомий контакт), який своїм другим кінцем проходить крізь ізолятор 11 і заходить у нерухомий контакт 7. На другому кінці коромисла 13 у цей час розтягується пружина 9. Коли вимикач увімкнений, струм проходить через ввідну струмопровідну шину 1, гнучку шину 5, контактний стержень 6, контакт 7, затискач 2 і надходить до відвідної шини. У ввімкненому стані контакти цього вимикача вдержує спеціальна заскочка на приводі.
Рис.
13—5.
Роз’єднувач
рубаючого типу для зовнішнього
встановлення на 6
кв.
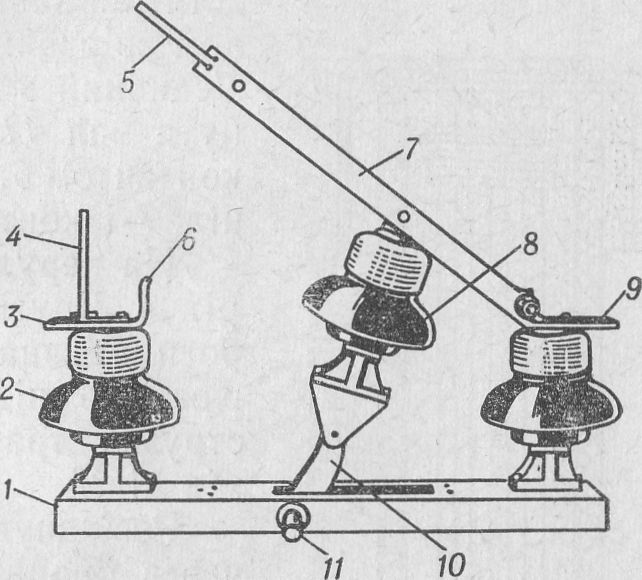
В автогазових вимикачах дуга гаситься газами, які утворюються під дією дуги внаслідок розкладання пластичних мас (плексигласу, органічного скла і гетинаксу).
В окрему групу слід виділити так звані вимикачі навантаження, які вимикають тільки струми навантаження. Для захисту обладнання від коротких замикань до цих вимикачів приєднують високовольтні запобіжники. Вимикачі навантаження розраховані на напругу 6—10 кв і можуть вимикати струми 200—400 а. Застосовують їх на закритих підстанціях невеликих потужностей.
Найбільш потужними і досконалими, але разом з тим складними і дорогими, єповітряні вимикачі, в яких гасіння дуги і все керування виконується стисненим (до 18—20 атм) повітрям. У повітряних вимикачах дуга гаситься за 0,05—0,08 сек. Вони розраховані на напругу HO, 220 і 400—500 кв.
Роз’єднувачі. Роз’єднувачі не мають дугогасильних пристроїв. Тому ними можна розмикати електричні кола лише після того, як струм навантаження вимкне масляний або якийсь інший вимикач; вмикають роз’єднувач раніше, ніж вимикач. Роз’єднувачі створюють видимий розрив електричного кола, що гарантує безпеку під час ремонтів і ревізій вимикальних апаратів. Якщо ж розірвати роз’єднувачем коло з струмом навантаження, то утворена дуга може спричинити аварію електричної установки.
Правилами експлуатації електричних установок роз’єднувачем дозволяється вимикати: струми навантаження до 15 а при напрузі
до 10 кв; трансформатори напруги і повітряні лінії будь-якої довжини з робочою напругою до 20 кв; струм холостого ходу силових трансформаторів потужністю до 750 кет, а при напрузі — до 10 кет.
Роз’єднувачі бувають однополюсні і триполюсні, для внутрішнього і зовнішнього встановлення, на різні струми і напруги (від цього залежить тип ізоляторів, на яких вони змонтовані).
На рис. 13—5 показано (у вимкненому положенні) один полюс роз’єднувача рубаючого типу на 6 кв для зовнішньої установки.
Рис.
13—6.
Високовольтний
запобіжник типу ПК.
На нерухомому контакті 6 закріплений ріг 4. Другий ріг 5 закріплений на ножі. Ці роги призначені для гасіння дуги, яка утворюється під час вимикання намагнічуючих струмів трансформаторів або невеликих струмів ліній.
Роз’єднувач монтують на стальній рамі 1 через опорні ізолятори 2.
13—3. АПАРАТУРА ЗАХИСТУ ЕЛЕКТРООБЛАДНАННЯ
Для захисту високовольтного електрообладнання від коротких замикань застосовують високовольтні запобіжники і реле. Крім того, електрообладнання захищають від грозових ударів і перенапруг відповідними апаратами і пристроями.
Високовольтні запобіжники. Високовольтні запобіжники бувають для внутрішнього встановлення — типу ПК і ПКТ і для зовнішнього встановлення — типу ПКН і ПСН на напругу 3, б, 10 і 35 кв. їх плавкі вставки виготовляють для струмів різної величини — від 2 до 400 а.
Нарис. 13—6 показано розріз запобіжника типу ПК (запобіжник з кварцовим наповненням). Він має фарфорову трубку 5, на кінцях якої цементним розчином закріплені латунні ковпачки 2 і 6. Усередині трубки міститься плавка вставка 4 з кількох покритих сріблом мідних дротинок, намотаних на керамічний сердечник. Внутрішній простір трубки заповнений чистим дрібним кварцовим піс-
ком 3. У робочому положенні одна з дротинок плавкої вставки вдержує пружину покажчика 7 у стисненому стані. Зверху і знизу до патрона припаяні кришки 1. Коли плавка вставка перегоряє, пружина виштовхує назовні покажчик і цим сигналізує, що запобіжник спрацював. У запобіжнику ПКТ (для захисту вимірювальних трансформаторів) плавку вставку виготовляють з константанової дротинки. Вона не має покажчика спрацьовування, тому що перегоряння запобіжника в колі вимірювального трансформатора відразу помітить черговий персонал.
 Для
зовнішньої установки застосовують
стріляючі запобіжники типу ПСН, в
яких при згорянні плавкої вставки з
трубки з шумом викидається полум’я.
Для
зовнішньої установки застосовують
стріляючі запобіжники типу ПСН, в
яких при згорянні плавкої вставки з
трубки з шумом викидається полум’я.
Для напруг понад 10 кв застосовують рогові запобіжники. Плавка вставка в цьому запобіжнику міститься в скляній трубочці, заповненій тальком. При перегорянні вставки від тепла дуги тальк бурно виділяє гази, скляна трубка вибухає, дуга переходить на стальні роги,здовжується і швидко гасне.
Реле. У складних мережах з двома або більше точками живлення плавкі запобіжники не можуть забезпечити достатньо надійного захисту обладнання при коротких замиканнях. У цих випадках захист виконують досконаліші, але й складніші, автоматично діючі апарати — реле.
Крім головних реле, які спрацьовують при порушенні нормального режиму роботи (зміна зверх норми струму, напруги, тиску газів та ін.), у схемах захисних пристроїв застосовують допоміжні реле: часу, сигнальні, проміжні.
Реле часу забезпечує спрацювання пристроїв через певний проміжок часу після початку короткого замикання; сигнальні реле полегшують обслуговуючому персоналу швидку орієнтацію в схемі аварійного захисту; через контакти проміжного реле
(їх завжди кілька пар) вмикаються кола вимикачів, сигнальних пристроїв тощо.
На рис. 13—7 схематично зображено реле часу типу ЭВ. При вмиканні намагнічуючої котушки З в коло джерела живлення якір 1 втягується всередину котушки, стискуючи протидіючу пружину 2. Поступальний рух якоря за допомогою зубчастої передачі 4 і 5 перетворюється в обертальний рух повідця 6, який заводить пружину 7 годинникового механізму. На осі годинникового механізму, що має маятник 8 і храповик 9, закріплена струмопідвідна пружина 10 рухомого контакту 11. При роботі реле вона повертається до зіткнення з струмовідвідною пружиною нерухомого контакту 12, який за допомогою колодки 13 можна пересувати і закріплювати на шкалі 14, забезпечуючи потрібний час спрацювання виконуючого кола, яке приєднується до затискачів 15 і 16. При вимкненні котушки З пружина 2 повертає якір 1 у вихідне положення.
Рис.
13—8.
Принципові
схеми максимального (а) і диференціального
(б)
струмових захистів.
Головні і допоміжні реле разом з вимірювальними трансформаторами сполучені в схеми захисту генераторів, трансформаторів, ліній, двигунів тощо.
Найбільше поширені дві основні схеми захисту: максимальна струмова і диференціальна струмова.
Для забезпечення надійності поєднують обидва види захисту. На рис. 13—8, а зображено принципову схему максимального стру- мового захисту. Струмове реле ЭТ вмикають у кожну фазу. Котушки цих реле живляться від трансформаторів струму, які ввімкнені також у кожну фазу. При короткому замиканні струм / у головному колі різко зростає. Збільшений струм у вторинній обмотці Ip трансформатора струму примушує замкнути розімкнені контакти реле ЭТ. У колі реле часу ЭВ виникне оперативний струм від стороннього джерела. Контакти замкнуться і живлення дістане котушка проміжного реле ЭП, яке спрацює і замкне коло вимикаючих апаратів: вимикача, сигнального пристрою тощо.
Принципову схему диференціального струмового захисту (одна фаза, без допоміжних реле) зображено на рис. 13—8, б. Реле типу ЭТ
вмикаються до з’єднувальних проводів паралельно. У нормальному режимі вторинні струми циркулюють по з’єднувальних проводах, не заходячи в реле, тому що потенціали в точках 1 і 2 рівні. При короткому замиканні в зоні захисту, охопленої двома трансформаторами струму, баланс струмів обох груп трансформаторів порушується, струм заходить у реле ЭТ, і воно спрацьовує. Далі схема працює аналогічно до попередньої.
Диференціальний захист відзначається високою чутливістю і швидкістю дії, тому він зараз широко застосовується.
Рис.
13—9.
Схема
будови і вмикання трубчастого розрядника
типу PT.
Аналіз аварій за ряд років на електроустановках України показує, що близько 30% цих аварій були наслідком грозових перенапруг.
Там, де є надійний грозозахист, імовірність попадання грозових розрядів в електричні установки виключається майже повністю.
Блискавка являє собою складне явище електричного розряду в атмосфері між різнойменно зарядженими частинами хмар або між хмарою і землею. Принцип дії будь-якого грозозахисного пристрою полягає в тому, що він приймає на себе розряд блискавки і потім відводить його в землю, не допускаючи на споруду. Потужність грозового розряду буває дуже великою. Його напруга може досягати кількох мільйонів вольт, а струми — десятків тисяч амперів.
Захист електричних установок від прямих ударів блискавки виконують за допомогою блискавковідводів. На відкритих підстанціях установлюють стержневі блискавковідводи, що являють собою високу (кілька десятків метрів) щоглу, яку встановлюють на бетоні. Зверху закріплюють стальний стержень, який надійно заземлюють. Зона захисту буде тим більша, чим більша висота стержня блискавковідводу. Захист певної площі (підстанція тощо) від прямих ударів блискавки виконують установленням кількох стержневих блискавковідводів. Опір заземлення їх не повинен перевищувати 20 ом.
Підходи ліній передачі до підстанцій напругою 20—35 кв захищають від прямих ударів блискавки захисними заземленими тросами, які підвищують над проводами лінії електропередач на 800—1000 м від підстанції. Лінії напругою HO кв і більше захищають тросами по всій її довжині.
Під час грозових розрядів у проводах ліній електропередач від електромагнітного поля блискавки індукуються великі е. р. с., значно вищі від напруги лінії. Ця перенапруга в лінії доходить до підстанції або станції і може пошкодити ізоляцію машин і апаратів, якщо не вжити відповідних заходів захисту.
Захист електричних установок від грозових перенапруг вико-
нують
розр
ядниками.
Рис.
13—10.
Вентильний
розрядник типу РВП.
Трубчасті розрядники застосовують для захисту ліній електропередач, а вентильні захищають трансформатори, генератори та інше електрообладнання.
Трубчастий розрядник (рис. 13—9) складається з фібробакеліто- вої трубки 4, металевого стержневого електрода /, металевих наконечників 3 і резервуара 2 (для створення газового дуття). Відстань I1 між електродами забезпечує розряд усередині трубки, а не по поверхні розрядника (відстань I2). Крім внутрішнього іскрового проміжку, трубчастий розрядник відокремлений від лінії, що захищається, додатковим зовнішнім іскровим проміжком Ib, щоб при нормальних умовах розрядник не був весь час під напругою.
Атмосферна перенапруга пробиває зовнішній і внутрішній проміжки розрядника і відводиться в землю. Гази, що утворюються в трубці, вириваються через передбачений для цього отвір яскравим снопом назовні з шумом, що нагадує постріл. При цьому відбувається повне гасіння дуги, і споживачі електроенергії не відчувають перерви в електропостачанні.
Вентильні розрядники за своїм призначенням поділяються на станційні (PBC) і підстанційні (РВП).
На рис. 13—10 показано вентильний розрядник типу РВП. Він складається з фарфорового кожуха 1, іскрових проміжків 2, виконаних з латунних фасонних пластин (електродів), розділених міка- нітовими шайбами, вушка 4 для підвішування до проводу лінії, хомута 5 для заземлення і дисків 3 з спеціального матеріалу — віліту, електричний опір якого різко знижується з підвищенням напруги.
Якщо по лінії до електростанції або підстанції пробігає хвиля атмосферної перенапруги, то вона насамперед попадає на вентильний розрядник, пробиває іскрові проміжки і через вентиль іде в землю. Коли струм, створений атмосферною перенапругою, пройде в землю, опір віліту різко зростає і не пустить робочого струму лінії в землю. При цьому споживач не відчує перерви в електропостачанні.
13-4. ІЗОЛЯТОРИ, ШИНИ І КАБЕЛІ
Для закріплення проводів (ліній електропередач, збірних шин на станціях і підстанціях), а також апаратів високої напруги і для ізоляції цих проводів та апаратів від землі застосовують і зол ατό р и: опорні, прохідні, штирові І ПІДВІСНІ.
а
зверху покривають гла-
Рис.
13—11.
Опорний
ізолятор типу OA.
Прохідні ізолятори для розподільних пристроїв мало чим відрізняються від прохідних ізоляторів для трансформаторів (див. рис. 4—5).
На лініях до 10 кв застосовують штирові ізолятори типу ШС (штировий Слов’янського заводу) і до 35 кв — ТІШ (штировий дельта). Для ліній електропередач напругою 35 кв і вище застосовують підвісні ізолятори типу П.
Підвісні ізолятори підвішують один під одним, утворюючи так звану гірлянду.
Шини. У розподільних пристроях схему первинних кіл виконують головним чином за допомогою голих шин — алюмінієвих, мідних або стальних — звичайно прямокутного перерізу. Рідше застосовують круглі і трубчасті шини.
При великих струмах застосовують декілька шин водній фазі. Для кращого охолодження їх кріплять на певній відстані плазом або на ребро (рис. 13—12). До ізоляторів такі шини кріплять шино- тримачами.
Для відкритих розподільних пристроїв на повітряних лініях електропередачі найчастіше застосовують гнучкі шини з таких самих голих багатодротяних проводів.
Кабелі. На електричних станціях і підстанціях для сполучення генераторів і трансформаторів з розподільним пристроєм, для виведення живильних ліній від розподільного пристрою до повітряної лінії, для подачі енергії до електродвигунів тощо застосовують силові кабелі. Кабель складається з кількох жил, кожна з яких має велику кількість голих мідних провідників круглого перерізу.
 Разом
узяті, вони являють собою один струмоведучий
провідник великого перерізу. Така
конструкція жили зменшує електричні
втрати і надає кабелю певної гнучкості.
Кожна з жил
кабеля ізольована
одна від одної кабельним папером. Між
жилами закладено джутовий заповнювач.
Щоб ізолювати жили від землі, роблять
пасову ізоляцію з кількох шарів кабельного
просоченого паперу. Поверх пасової
ізоляції кабеля
напресована
свинцева суцільна оболонка, яка
захищає стру- моведучі жили кабеля
від
проникнення в ізоляцію вологи і від
витікання з кабельного паперу
речовини, якою його просочують. В
окремих випадках свинцеву обо- 1
лонку
замінюють алюмінієвою або пластмасовою.
Поверх свинцевої оболонки на- Рис.
13—12.
Кріплення
кладають
шар просоченої паперової стріч- шин
на ребро. ки
і шар джуту, просоченого асфальтовим
Разом
узяті, вони являють собою один струмоведучий
провідник великого перерізу. Така
конструкція жили зменшує електричні
втрати і надає кабелю певної гнучкості.
Кожна з жил
кабеля ізольована
одна від одної кабельним папером. Між
жилами закладено джутовий заповнювач.
Щоб ізолювати жили від землі, роблять
пасову ізоляцію з кількох шарів кабельного
просоченого паперу. Поверх пасової
ізоляції кабеля
напресована
свинцева суцільна оболонка, яка
захищає стру- моведучі жили кабеля
від
проникнення в ізоляцію вологи і від
витікання з кабельного паперу
речовини, якою його просочують. В
окремих випадках свинцеву обо- 1
лонку
замінюють алюмінієвою або пластмасовою.
Поверх свинцевої оболонки на- Рис.
13—12.
Кріплення
кладають
шар просоченої паперової стріч- шин
на ребро. ки
і шар джуту, просоченого асфальтовим
лаком, які захищають свинцеву оболонку від механічних пошкоджень і хімічного впливу навколишнього середовища.
Зовні поверхню кабеля покривають стальною бронею у вигляді стрічки, яка захищає кабель від механічних пошкоджень.
Усередині приміщень і на території станцій та підстанцій кабелі прокладають у спеціальних кабельних каналах, а на стінах і стелях — на спеціальних кронштейнах, скобах і підвісах.
13-5. РОЗПОДІЛЬНІ ПРИСТРОЇ TA ПІДСТАНЦІЇ
Розподільним пристроєм (РП) називають сукупність електрообладнання, призначеного для приймання і розподілу електричної енергії. Розподільні пристрої бувають закриті і відкриті.
Закриті РП монтують усередині приміщень, а відкриті — поза приміщеннями.
Підстанції (П/С) призначені для зміни напруги, струму, для розподілу електричної енергії. Вони також бувають закриті і відкриті, але і в закритих П/С трансформатори можна встановити на відкритому повітрі.
РП і П/С можуть бути збірними і комплектними.
Збірними називають такі РП і П/С, електрообладнання яких монтує в запроектованому місці бригада електромонтерів.
Комплектні РП і П/С — це такі, усе електрообладнання яких змонтоване в спеціальних шафах на заводі і повністю підготовлене для вмикання до джерел енергії.
У РП все електрообладнання, яке належить одній лінії, монтують в окремих камерах, що називаються комірками. Електрообладнання таких комірок сполучають між собою проводами і приєднують до збірних шин. На рис. 13—13 зображено схему розподіль-
Рис.
13—13.
Схема
розподільного пристрою 6—10
кв
з однією системою збірних
шин.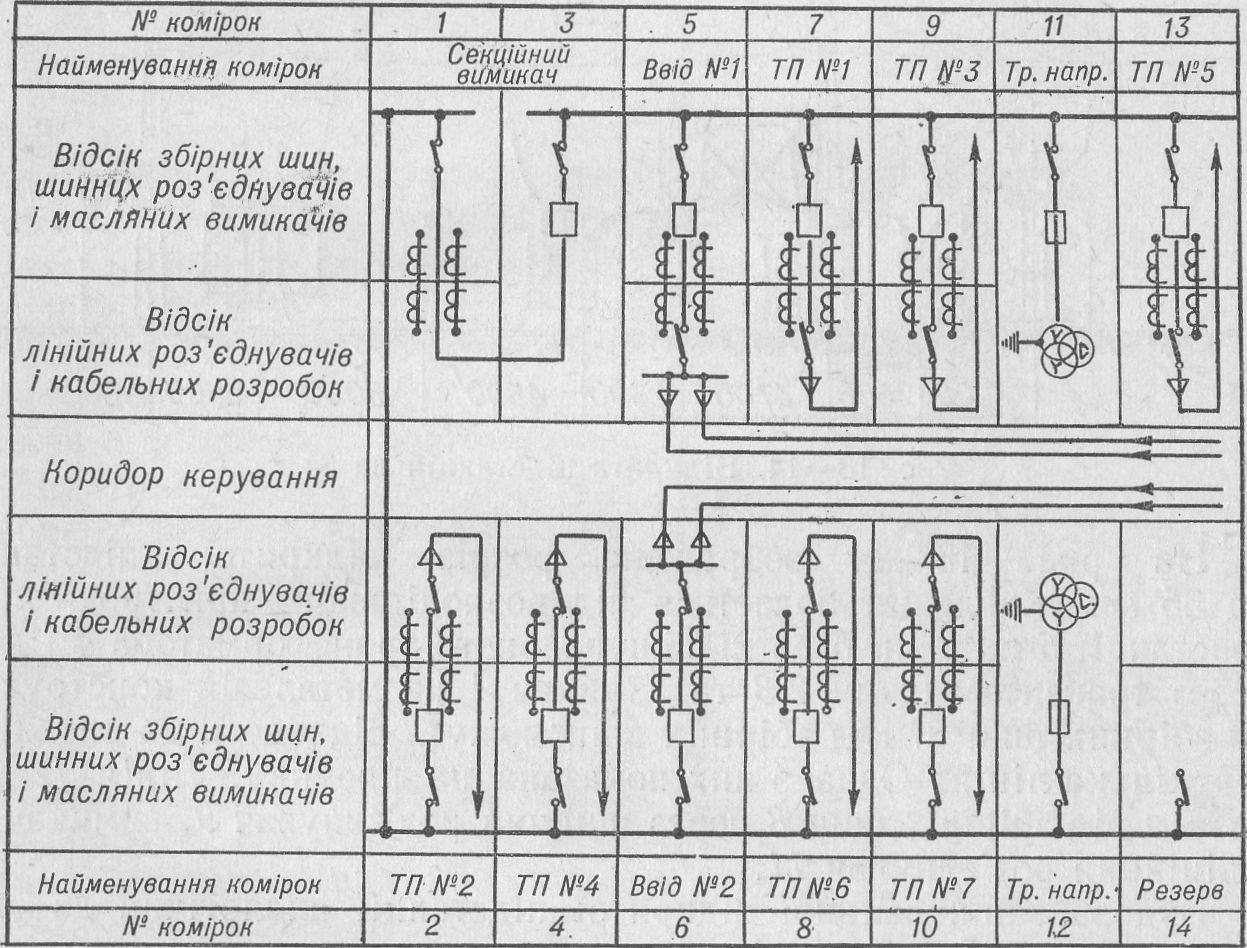
ного пристрою на 6—10 кв закритого типу з однією системою збірних шин. До комірок 5 і 6 від генераторів кабелями підводять живлення вздовж коридора керування. Ці кабелі через роз’єднувачі і вимикачі приєднують до збірних шин. Дві секції збірних шин можуть працювати окремо або паралельно через секційний масляний вимикач у комірці 3. Сім комірок РП живлять окремими лініями трансформаторні пункти (ТП), які встановлюють біля підприємств або в певному пункті міста, де напруга знижується до 380—220 в і подається безпосередньо до споживачів. Трансформатори струму і трансформатори напруги (в комірках № 11 і № 12) забезпечують
живлення вимірювальних приладів і реле, які розміщені на щиту керування станції або підстанції.
Будова закритих підстанцій майже не відрізняється від описаного вище розподільного пристрою.
Відкриті підстанції. Відкриті підстанції на напругу понад 35 кв економічно вигідніші, ніж закриті. Хоч вартість електрообладнання, призначеного для встановлення на відкритому повітрі, і більша, ніж електрообладнання для закритих П/С, проте в цілому вартість відкритих підстанцій менша, ніж закритих, бо тут не потрібне громіздке приміщення.
1-І
—crnibcn . 2 З
Рис.
13—14.
Відкрита
підстанція на 35
кв.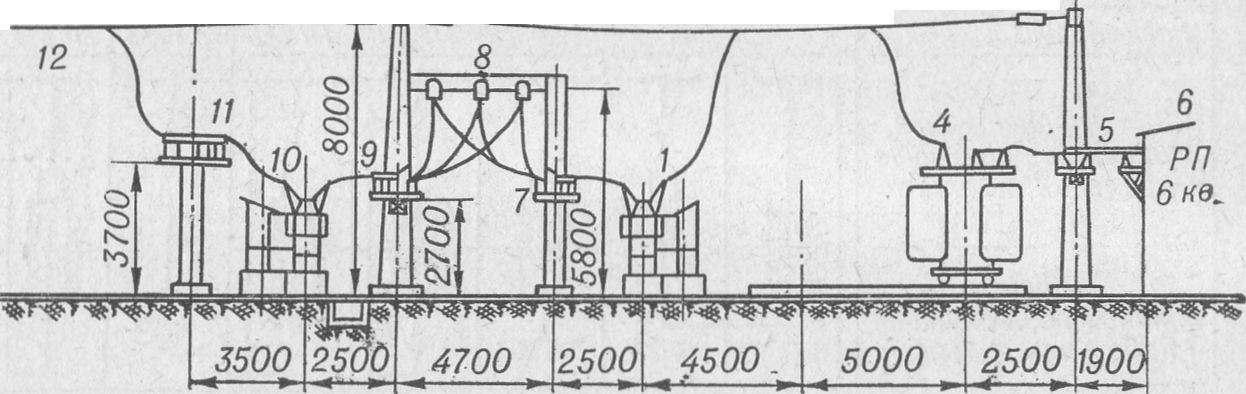
На рис. 13—14 зображено розріз відкритої підстанції на 35 кв. Живлення подається від розподільного пристрою електростанції 6 по шині 5 до підвішувального трансформатора 4 і далі через транзитну шину 2-3 та вимикач 1 на металевій конструкції до збірних шин 8. Від збірних шин можуть відходити до споживачів кілька ліній. Одна з них показана на рисунку. Лінія 12 живиться від збірних шин 8 через шинний роз’єднувач 9, вимикач 10 і лінійний роз’єднувач 11.
Будова знижувальної відкритої підстанції аналогічна до описаної.
13-6. ЛІНІЇ І сітки
Пристрої для передачі електричної енергії з місць виробництва до місця споживання називаються лініями електропередач (ЛЕП). Під лінією електропередач, на відміну від передачі енергії по місцевих або розподільних електричних мережах, розуміють передачу великих потужностей (десятки і сотні мегават) на великі відстані (десятки і сотні кілометрів) з великою напругою.
Лінії електропередач можуть бути транзитними, тобто такими, які передають усю потужність на кінцеву підстанцію, і магістральними з кількома відгалуженнями.
Є лінії постійного і трифазного змінного струму. Передача енергії змінним струмом є основною і найбільш поширеною передачею.
Під електричними мережами розуміють сукупність електропровідників і електричних пристроїв, призначених для передавання електроенергії з електростанції або потужної підстанції в місця споживання і розподілення цієї енергії між трансформаторними підстанціями, трансформаторними пунктами та індивідуальними споживачами (розподільні мережі).
Мережі бувають постійного струму, однофазного і трифазного змінного струму. Усі вони можуть бути внутрішніми і зовнішніми.
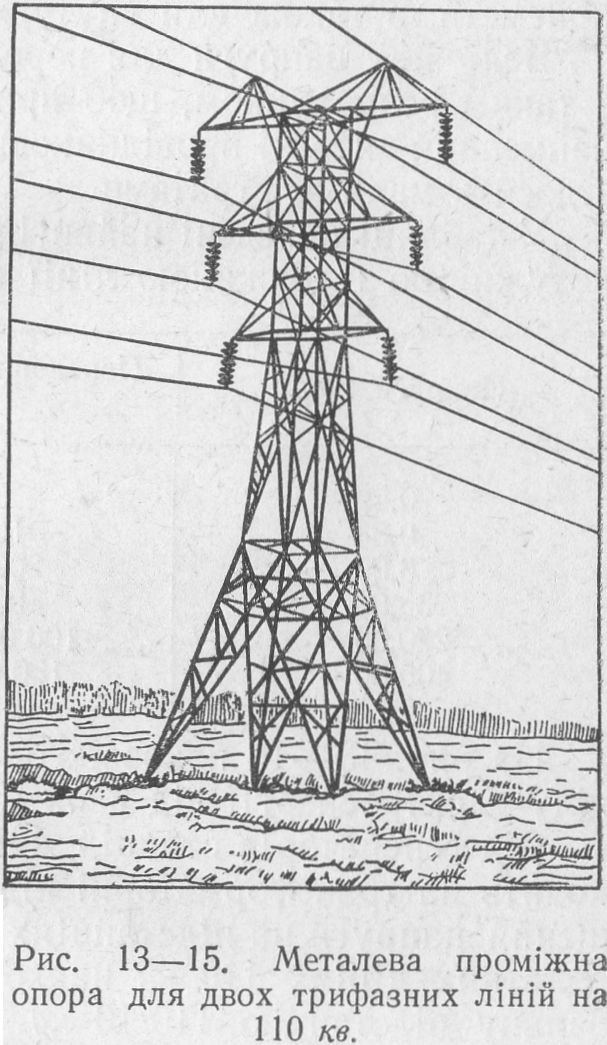 Внутрішні
мережі прокладають усередині приміщень
ізольованими проводами відкритим
способом на роликах та ізоляторах
або захованим способом у гумових і
паперових з металевою оболонкою
трубках, а також кабелем, який прокладають
у каналах, по стінах і стелях на спеціальних
кронштейнах.
Внутрішні
мережі прокладають усередині приміщень
ізольованими проводами відкритим
способом на роликах та ізоляторах
або захованим способом у гумових і
паперових з металевою оболонкою
трубках, а також кабелем, який прокладають
у каналах, по стінах і стелях на спеціальних
кронштейнах.
Зовнішні мережі, як і лінії електропередач, можуть бути кабельними (підземні) і повітряними.
Повітряні лінії і мережі потребують менших капітальних затрат, ніж підземні (кабельні); вони зручніші в експлуатації, бо пошкодження легко виявити при огляді, але менш надійні і більш небезпечні, ніж підземні.
Повітряні лінії і мережі високої напруги виконують з голих мідних багатодротових або сталеалюмінієвих проводів. Ix укріплюють на штирових ізоляторах (лінії до 35 кв) або на гірляндах підвісних ізоляторів, які в свою чергу закріплюють на дерев’яних (лінії до 35 кв) або металевих опорах на бетонному фундаменті. Гірлянда складається з 3—4 ізоляторів для напруги 35 кв, 6—7 — для 110 кв, 12—14—для 220 кв.
Опори бувають проміжні, анкерні, кінцеві і кутові.
Проміжні опори (рис. 13—15) установлюють на прямолінійних ділянках лінії. Вони призначені лише для підтримування проводів.
Анкерні опори ставлять через певні інтервали між проміжними опорами. Кожна анкерна опора повинна витримувати натяг проводів в один бік у випадку обриву всіх проводів з другого боку.
Кутові опори встановлюють у місцях повороту лінії. Сила натягу проводів у цих місцях спрямована по бісектрисі кута
повороту і намагається повалити опори. Відповідно до напряму дії цієї сили і ставлять кутові опори.
Кінцеві опори встановлюють на виході лінії з електростанції або підстанції. За міцністю вони повинні бути такими, як і анкерні.
Віддаль між опорами для ліній 35—220 кв беруть приблизно 200 м, а для ліній низької напруги — ЗО—50 м.
Кабельні підземні лінії і мережі застосовують переважно в густо населених містах і місцевостях, на територіях промислових підприємств, а також для внутрізаводської проводки.
Величину напруги для передачі електричної енергії визначають з таким розрахунком, щоб при найменшій вартості передачі, при найменшій витраті провідникових матеріалів енергія передавалась би
з досить малими втратами.
У таблиці наведені найвигідніші співвідношення між напругою, потужністю і довжиною лінії передачі, вироблені практикою.
Напруга (кв) |
Передавана потужність, кет |
Віддаль |
0,22 |
50—100 |
до 200 м |
0,38 |
100—175 |
» 350 м |
6,00 |
2000—3000 |
» 10 км |
35,00 |
5000—10 000 |
» 15—20 км |
220,00 |
100 000—150 000 |
» 200—300 км |
400,00 |
150 000 і вище |
понад 400 км |
На рис. 13—16 показано одну з можливих схем передачі і розподілу електроенергії від двох електростанцій.
Від генераторів станцій А і Б енергія напругою 10—15 кв надходить на трансформаторні підвищувальні підстанції. Після підвищення напруги на підстанціях енергія від обох станцій по високовольтних лініях 110 кв надходить у район споживача на знижувальну підстанцію 110/10 кв. Далі, через розподільний пристрій енергія по лініях мережі передається до трансформаторних підстанцій споживачів (ТП). Тут напруга знижується до 220—380 в і енергія по низьковольтних кабельних або повітряних лініях електропередачі подається безпосередньо до споживачів.
Енергію на далекі відстані постійним струмом передають так: на початку лінії генераторну напругу підвищують до потрібної напруги, ртутними випрямлячами змінний струм випрямляють у постійний і по лініях електропередачі передають енергію в район споживання. У кінці лінії інверторами перетворюють постійний струм у змінний, знижують його до потрібної напруги і подають до споживачів.
Для передачі енергії постійним струмом можна виконати надійну ізоляцію лінії напругою до мільйонів вольт, оскільки в ізоляції немає втрат, пов’язаних із змінним електромагнітним полем. Крім
Tft
/70
не
Станція
А
HO
не
JJO
не
[Підстанція
(п/с)
IfOflej
""!
Розподільний
пристріїи
\ТП
220-380
в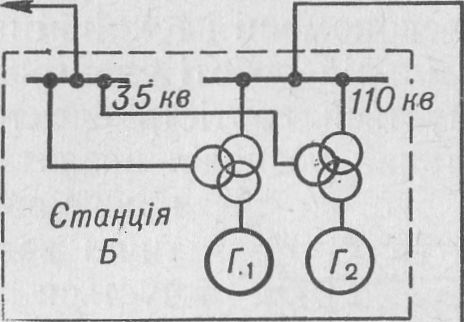


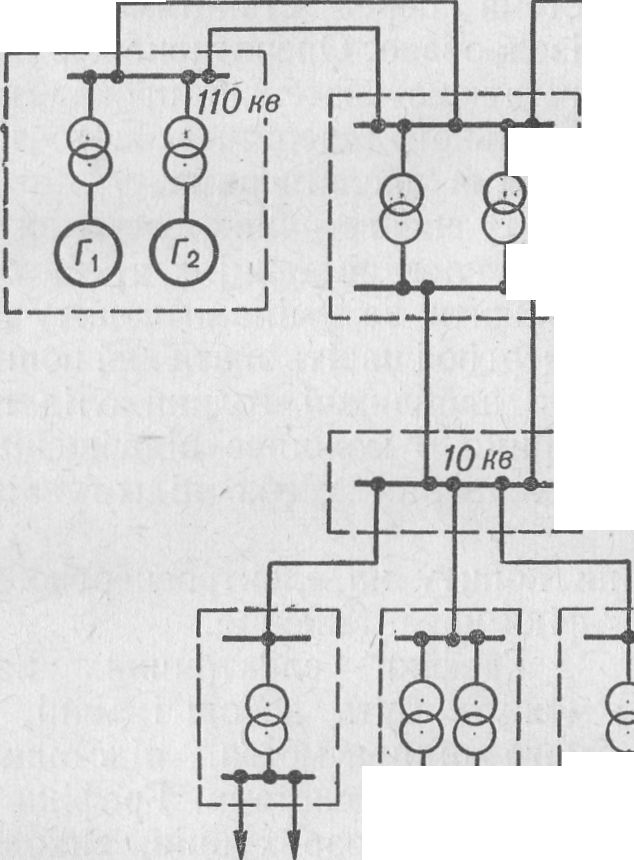

![]()
того, передача енергії постійним струмом розв’язує питання стійкої паралельної роботи кількох електростанцій, розміщених на далекій відстані. Проте постійний струм високої напруги для передачі енергії поки що широко не застосовується в зв’язку з труднощами, пов’язаними з виконанням високовольтних випрямлячів і перетворювачів.
3-7. ЕНЕРГЕТИЧНІ СИСТЕМИ І СПІЛЬНА РОБОТА ЕЛЕКТРОСТАНЦІЙ
Енергетичною системою називається сукупність електричних станцій, підстанцій і споживачів електричної та теплової енергії, зв’язаних між собою електричними і тепловими мережами. Робота всіх ланок системи тісно пов’язана; пошкодження і неполадки в одній частині впливають на роботу всієї системи.
Спільність господарства енергетичної системи дає змогу забезпечити високі економічні і технічні показники, яких не можна добитися при роздільній роботі електростанцій. При створенні енергосистем зменшується вартість електростанцій, забезпечується економічно доцільний розподіл навантаження між станціями системи,
Рис.
13—17.
Добовий
графік навантаження підприємства, що
працює в дві зміни.
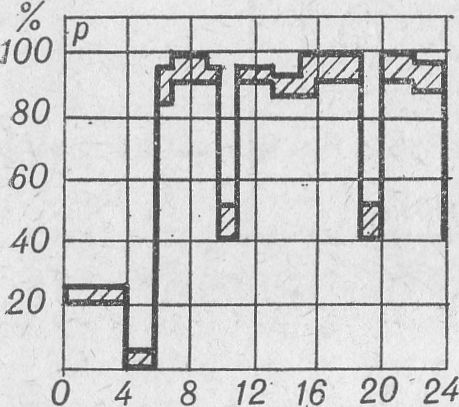
Такі, далеко не повні, переваги системи перед станціями, що працюють ізольовано. Оперативне керування енергетичною системою провадиться з центрального диспетчерського пункту черговими диспетчерами.
В енергетичних системах і на окремих електростанціях треба безперервно стежити за змінами попиту на електроенергію і навіть знати цей попит наперед.
При збільшенні попиту в найближчі години слід підготувати до пуску агрегати, які покрили б можливе підвищення навантаження; при зменшенні споживання треба підготувати зупинку агрегатів.
Наочне уявлення зміни попиту на електроенергію дають графіки навантаження.
0
4 8 12 16 20 год
Рис.
13—18.
Добовий
графік енергосистеми.

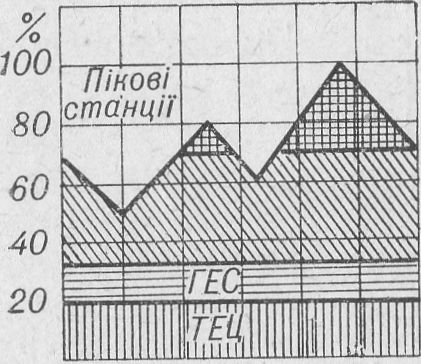
На рис. 13—17 зображено добовий графік навантаження підприємства, що працює в дві зміни. Заштрихована частина відповідає навантаженню від освітлення, яке звичайно становить близько
10% від загального навантаження. Провали навантаження в проміжки з 10 до 11 і з 19 до 20 год зумовлені обідніми перервами в роботі цехів. Під час цих перерв навантаження не спадає до нуля, тому що перерви в роботі окремих цехів зсунуті в часі одна відносно одної.
Добовий графік енергосистеми показано на рис. 13—18. При такому графіку найбільш економічні станції (ТЕЦ і ГЕС) завантажують повністю, потім завантажують конденсаційні електростанції і лише в години максимумів навантаження включають у роботу найменш економічні (пікові) станції. Піки навантаження можна покривати також за рахунок ГЕС. Такий розподіл навантаження між окремими станціями системи дає можливість знизити собівартість електроенергії і зменшити витрату палива за рахунок повного використання гідростанцій і найбільш економічних (із сучасним енергообладнанням) теплових електростанцій.
Об’єднання електростанцій в енергосистеми є характерною особливістю розвитку радянської енергетики.
Об’єднуються і енергетичні системи суміжних промислових районів. Так, вже створена єдина енергетична система Європейської частини нашої країни, а незабаром буде створена загальна енергетична система всього Радянського Союзу.
Стор.
З
Розділ І
Електричні кола змінного струму
1-1. Вироблення змінного струму
1-2. Векторні діаграми
1-3. Діючі (ефективні) і середні значення синусоїдальних е. р. с. струму
і напруги
1-4. Параметри електричних кіл змінного струму
1-5. Активний опір в колі змінного струму
1-6. Індуктивність в колі змінного струму
1-7. Ємність в колі змінного струму
1-8. Коло змінного струму з активним опором і індуктивністю
1-9. Коло змінного струму з активним опором і ємністю
1-10. Послідовне сполучення активного опору, індуктивності і ємності в колі
змінного струму. Резонанс напруг
11. Паралельне сполучення активного опору, індуктивності і ємності в колі
змінного струму. Резонанс струмів
12. Техніко-економічна ефективність коефіцієнта потужності cos φ і способи його підвищення
13. Індуктивна котушка з стальним осердям в колі змінного струму . .
Розділ Il
Багатофазні (трифазні) системи змінного струму
1. Загальні відомості .
2. З’єднання трифазної системи зіркою
3. З’єднання трифазної системи трикутником .
4. Потужність трифазних систем змінного струму
5. Обертове магнітне поле трифазного струму
Розділ III
Основи електровимірювальної техніки
1. Загальні відомості
3-2. Прилади магнітоелектричної системи
3. Прилади електромагнітної системи
4. Прилади електродинамічної системи
5. Прилади індукційної системи
6. Прилади електростатичної системи
7. Прилади вібраційної системи
8. Прилади з урівноваженою рухомою частиною — логометри
9. Самозаписні прилади
10. Електромеханічні осцилографи .
11. Електронний осцилограф
12. Методи вимірювання основних електричних величин у колах постійного
і змінного струмів
Сто p.
ЕЛЕКТРОТЕХНІКА 1
I = eW- "-П> 9
/~ТГ~ 50
' “ Vl\ + 1\ + I\ + I\+ ■■ +Il (1-93) 50
сп\ 59
и, 64
—07 110
,· _а,-J.,-, (4-,2) 122
K = ~i[~t + nxi· 152
71 = (р2 + SPim)100 % ’ 173
0= 174
'XfX'' ~хГхГ 233
B. + ^, (9_14) 253
Tft 351
Електричні генератори постійного струму
ЕЛЕКТРОТЕХНІКА 1
I = eW- "-П> 9
/~ТГ~ 50
' “ Vl\ + 1\ + I\ + I\+ ■■ +Il (1-93) 50
сп\ 59
и, 64
—07 110
,· _а,-J.,-, (4-,2) 122
K = ~i[~t + nxi· 152
71 = (р2 + SPim)100 % ’ 173
0= 174
'XfX'' ~хГхГ 233
B. + ^, (9_14) 253
Tft 351
Розділ IX
Електричні двигуни постійного струму
1. Принцип дії та обертальний момент двигунів постійного струму . . . 222 9-2. Способи збудження і пуск двигунів постійного струму . . . . . . . 224 9-3. Регулювання швидкості обертання та реверсування двигунів постійного
ЕЛЕКТРОТЕХНІКА 1
I = eW- "-П> 9
/~ТГ~ 50
' “ Vl\ + 1\ + I\ + I\+ ■■ +Il (1-93) 50
сп\ 59
и, 64
—07 110
,· _а,-J.,-, (4-,2) 122
K = ~i[~t + nxi· 152
71 = (р2 + SPim)100 % ’ 173
0= 174
'XfX'' ~хГхГ 233
B. + ^, (9_14) 253
Tft 351
З
7 = pf = 0.70711
і остаточно р = Pi + Pi + Рз-
З цього видно, що миттєве значення потужності складається
з трьох складових. Знайдемо середнє значення потужності за період:
7 = V I а2+ Iη2,
1аів—в7