

2. Расчет характеристик погрешности результата измерения
Основными составляющими погрешности результата измерения, которые необходимо определить в работе являются: мультипликативная погрешность, аддитивная погрешность и суммарная погрешность. В области преобразования Лапласа выражения для этих составляющих и суммарной погрешности имеет следующий вид
![]() уравнение
суммарной погрешности;
уравнение
суммарной погрешности;
![]() уравнение
мультипликативной погрешности;
уравнение
мультипликативной погрешности;
![]() уравнение
аддитивной погрешности.
уравнение
аддитивной погрешности.
Используя обратное преобразование Лапласа, получим
![]() (2.1)
(2.1)
![]() (2.2)
(2.2)
![]() (2.3)
(2.3)
где 0() – нормированная весовая функция СИ,
() – единичная – функция.
Запишем выражение (2.1) в следующем виде
![]() (2.4)
(2.4)
где
![]() систематическая
погрешность результата измерения,
систематическая
погрешность результата измерения,
![]() – мультипликативная
составляющая погрешности,
– мультипликативная
составляющая погрешности,
![]() – аддитивная
составляющая систематической погрешности
(2.5),
– аддитивная
составляющая систематической погрешности
(2.5),
![]() центрированная
случайная погрешность результата
измерения, обусловленная случайной
составляющей аддитивного возмущения,
накладывающегося на измеряемую величину
Х(t)
на входе СИ.
центрированная
случайная погрешность результата
измерения, обусловленная случайной
составляющей аддитивного возмущения,
накладывающегося на измеряемую величину
Х(t)
на входе СИ.
2.1. Определение систематической погрешности результата измерения
Систематическая погрешность определяется на основе выражений (2.2), (2.4), (2.5) в двух режимах измерения: статическом и динамическом.
2.1.1 Статический режим измерения
Под статическим
режимом измерения понимается такой
режим измерения, при котором влияние
инерционных свойств СИ на погрешность
результата измерения пренебрежимо
мало. При таком допущении можно принять
![]() и
уравнения (2.2) и (2.5) записать в следующем
виде
и
уравнения (2.2) и (2.5) записать в следующем
виде
![]() (2.7)
(2.7)
![]() (2.8)
(2.8)
Из выражения (2.7) следует, что мультипликативная погрешность возникает из-за того, что k = k – 1 ≠ 0, то есть из-за того, что СИ воспроизводит единицу величины не точно.
Пример 2.1.
Пусть
![]() С1
=10 В; С3
=0,1 Вс-2;
k
=0.01;
С1
=10 В; С3
=0,1 Вс-2;
k
=0.01;
![]() В. Тогда на основе уравнений (2.7), (2.8) и
(2.4) получим
В. Тогда на основе уравнений (2.7), (2.8) и
(2.4) получим
![]()
![]() ,
,
![]() .
.
Графики мультипликативной, аддитивной и суммарной систематических погрешностей представлены на рис. 2.1.
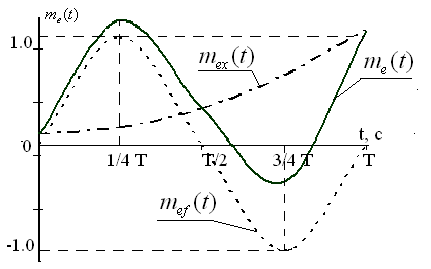
Рис. 2.1. Графики мультипликативной, аддитивной и суммарной систематических погрешностей в статическом режиме
2.1.2. Динамический режим измерения
Под динамическим
режимом измерения понимается такой
режим измерения, при котором влиянием
инерционных свойств СИ на погрешность
результата измерения пренебречь нельзя.
При таком допущении
![]() и, следовательно, определение
мультипликативной погрешности сводится
к интегрированию выражений (2.2) и (2.5).
и, следовательно, определение
мультипликативной погрешности сводится
к интегрированию выражений (2.2) и (2.5).
Для случая
![]() (установившееся состояние СИ) и
существования производных
(установившееся состояние СИ) и
существования производных
![]() ,
выражения (2.2) и (2.5) могут быть представлены
конечными суммами следующего вида
,
выражения (2.2) и (2.5) могут быть представлены
конечными суммами следующего вида
 (2.9)
(2.9)
где
![]()
![]()
![]()
Пример 2.2.
Пусть
![]() С1=10
В, С3=0,1
Вс-2,
k
= 0,01.
Передаточная функция СИ равна
С1=10
В, С3=0,1
Вс-2,
k
= 0,01.
Передаточная функция СИ равна
![]()
Требуется определить систематическую мультипликативную погрешность.
Решение:
Из выражения (2.9) имеем
![]()
где
следовательно, x = 2.
![]() ;
;
![]() ;
;
![]()
Используя полученные выражения, будем иметь

Приравнивая правую часть этого выражения нулю
![]()
Корни этого уравнения равны
![]()
Таким образом, получим
t1=10 c, t2=2010 c.
Графическое изображение функции mex(t) на интервале [t1, t2] представлено на рис. 2.2.

Рис. 2.2. График систематической мультипликативной погрешности в динамическом режиме