

2.2.1.6 Частотный способ регулирования скорости
Частотный способ является одним из наиболее перспективных и широко используемых в настоящее время способов регулирования скорости асинхронного двигателя (АД). Принцип его заключается в том, что, изменяя частоту f питающего АД напряжения, можно изменять его синхронную скорость холостого хода w0, получая тем самым различные искусственные характеристики. Этот способ обеспечивает плавное регулирование в широком диапазоне, получаемые характеристики обладают

Рис. 2.26. Механические характеристики асинхронного двигателя с ТПН
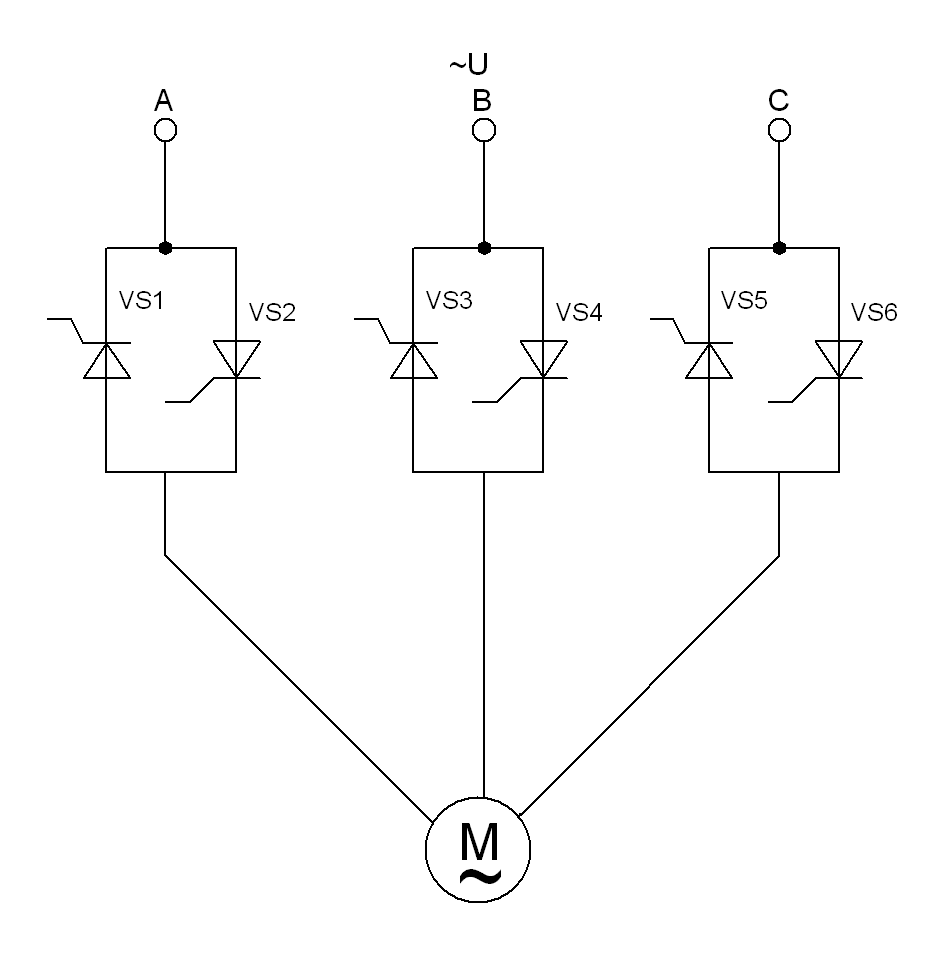
Рис. 2.27. Схема управления асинхронным электродвигателем при помощи ТПН
высокой жесткостью. Частотный способ к тому же отличается и еще одним весьма важным свойством: при регулировании скорости АД не происходит увеличения его скольжения, как это имеет место, например, при реостатном регулировании. Поэтому данный способ регулирования оказывается наиболее экономичным.
Для лучшего использования АД и получения высоких энергетических показателей его работы — коэффициентов мощности, полезного действия, перегрузочной способности — одновременно с изменением частоты питающего напряжения необходимо изменять и значение этого напряжения. Закон изменения напряжения при этом зависит от характера момента нагрузки. При выборе соотношений частота - напряжение исходят из условия сохранения перегрузочной способности АД. При этом, добиваясь таких соотношений, при помощи преобразователей частоты различной конструкции, между частотой и напряжением, которые позволяют максимизировать отношение Мк/Мс.
Различные типы преобразователей частоты (ПЧ), которые нашли применение в области частотного асинхронного электропривода, могут быть разделены на две группы, отличающиеся друг от друга по используемым техническим средствам и структуре.
К первой группе относятся машинные или вращающиеся преобразователи, в которых для получения переменной частоты используются обычные или специальные электрические машины. Ко второй группе преоброзавательй частоты принадлежат статические преобразователи.
В настоящее время широко применяются статические преобразователи. Название это они получили потому, что система построена на статических элементах и устройствах, таких, как полупроводниковые приборы, конденсаторы и т. д. Большое внимание, которое уделяется вопросу создания регулируемых статических преобразователей частоты, определяется теми высокими технико-экономическими показателями, которые приобретает регулируемый частотный электропривод в случае их использования. Повышаются КПД системы регулирования (он достигает 0,85—0,9) и ее быстродействие, устраняется шум при работе.
Все статические ПЧ могут быть разделены на две группы:
ПЧ без звена постоянного тока с непосредственной связью питающей сети и нагрузки (непосредственный ПЧ);
преобразователи с промежуточным звеном постоянного тока (двухзвенные ПЧ).
Рассмотрим ПЧ со звеном постоянного тока. Функциональная схема ПЧ показана на рис. 2.28. Силовая часть ПЧ этого типа состоит из двух основных блоков: управляемого выпрямителя УВ и управляемого инвертора УИ. Напряжение сети Ui стандартной частоты f подается на вход УВ, преобразующего переменное напряжение U1 в постоянное E0. Это напряжение можно регулировать в широких пределах с помощью схемы управления СУУВ. Выпрямленное и регулируемое напряжение Ео подается на вход УИ, который преобразует напряжение постоянного тока Ео в трехфазное переменное напряжение Uрег регулируемой частоты fper. Частота выходного напряжения fper УИ задаемся его схемой управления СУУИ в функции сигнала управления.
В зависимости от способа коммутации тока вентилей инверторы делятся на ведомые сетью и автономные. В инверторах, ведомых сетью, коммутация тока с вентиля на вентиль обеспечивается напряжением переменного тока источника питания.
В автономных инверторах для коммутации тока используются дополнительные элементы — конденсаторы и катушки индуктивности. В электроприводах с частотным управлением чаще используются автономные инверторы.
Автономные инверторы делятся на два класса — инверторы напряжения и тока. Автономные инверторы напряжения (АИН) имеют в качестве источника питания источник напряжения. Если АИН питаются от управляемого выпрямителя, то на выходе выпрямителя для этого устанавливается конденсатор большой емкости. В результате АИН имеет жесткую внешнюю характеристику, т. е. с изменением тока нагрузки напряжение АИН практически не изменяется. Вследствие таких свойств при использовании АИН управляющими воздействиями на асинхронный двигатель являются частота и напряжение.

Рис. 2.28. Схема ПЧ со звеном постоянного тока
Автономные инверторы делятся на два класса — инверторы напряжения и тока. Автономные инверторы напряжения (АИН) имеют в качестве источника питания источник напряжения. Если АИН питаются от управляемого выпрямителя, то на выходе выпрямителя для этого устанавливается конденсатор большой емкости. В результате АИН имеет жесткую внешнюю характеристику, т. е. с изменением тока нагрузки напряжение АИН практически не изменяется. Вследствие таких свойств при использовании АИН управляющими воздействиями на асинхронный двигатель являются частота и напряжение.
Автономные инверторы тока (АИТ) обладают свойствами источника тока, для чего их питание осуществляется от источника тока. При использовании в качестве источника питания управляемого выпрямителя на его выходе для придания ему такого свойства устанавливается дроссель с большой индуктивностью. При использовании АИТ управляющими воздействиями на АД являются частота и ток статора.
Каждый из видов автономного инвертора имеет в частотно-управляемом асинхронном электроприводе свою область применения. Достоинством АИН является независимость выходного напряжения от частоты и момента нагрузки.