

Дискретное преобразование Гильберта.
1. Комплексная огибающая.
В различных системах
обработки сигналов часто применяются
узкополосные сигналы, спектр которых
сосредоточен в окрестности некоторой
частоты ω0.
![]()
При анализе таких сигналов удобно пользоваться понятиями:
- комплексаня огибающая,
- амплитудная огибающая,
- фазовая функция сигнала.
Рассмотрим сигнал с переменной амплитудой и фазой:
![]()
Множитель A(t)
называется амплитудной огибающей, φ(t)
называется фазовой функцией сигнала.
![]() называется полной фазой сигнала. Такой
сигнал можно представить, как действительную
часть некоторой комплексной функции.
называется полной фазой сигнала. Такой
сигнал можно представить, как действительную
часть некоторой комплексной функции.
![]()
exp(jω0t) – немодулирование (несущие) кол-ее (быстро меняющаяся часть); A(t)exp(jφt) – как правило, меняется значение медленее. Этот множитель называется комплексной огибающей сигнала.
![]()
Рассмотрим другую задачу: представим производную сигнала s(t) в форме (*), т.е. мы хотим выделить его амплитудную огибающую и фазовую функцию. Это можно как задачу соотв-я решить множеством способов. Но к A(t) и φ(t) пред-ся определенные требования.
1) Для
![]() ,
φ0
= const.
Кроме того, фазовая функция не должна
меняться при умножении сигнала на
произв. пост. множитель. С учетом этих
требований представление (*) является
единственным. И такое представление
осуществляется с помощью преобразования
Гильберта.
,
φ0
= const.
Кроме того, фазовая функция не должна
меняться при умножении сигнала на
произв. пост. множитель. С учетом этих
требований представление (*) является
единственным. И такое представление
осуществляется с помощью преобразования
Гильберта.
Преобразование Гильберта.
Для выделения
амплитуды и фазы произвольный сигнал
представляется вещественной частью
комплексного сигнала
![]() (аналитический
сигнал, опр-е):
(аналитический
сигнал, опр-е):
![]()
Мнимая часть
![]() называется сопряженным сигналом или
квадратурным дополнением.
называется сопряженным сигналом или
квадратурным дополнением.
![]()
Сопряженный сигнал вычисляется из исходного с помощью преобразования Гильберта. По определению ПГ это
![]()
Как видно ПГ – это свертка сигнала s(t) с функцией 1/(πt). Раз это свертка, то она может быть вычислена линейной системой. Значит Y(s(t)) есть линейное инт. преобразование. Можем найти частотную характеристику ПГ:
![]()
Итак АЧХ преобразования Гильберта равна единице вектору, кроме нулевой частоты, т.е. ПГ не имеет амплитуд. соотн-ий в спектре сигнала, удаляя из него только пост. составляющую. Фазы всех спектральных составляющих в области положительных частот уменьшаются на 90°, а в области отрицательных частот – увеличиваются на 90°.
Т.о. устройство, осуществляющее преобразование Гильберта, должно представлять собой идеальный фазовращатель, вносящий на всех частотах фазовый сдвиг, равный 90°.
Обратное ПГ должно внести обратный тот же фазовый сдвиг, т.е.
![]() .
.
Т.е.
![]() .
.
Обратное и прямое ПГ отличаются только знаком.
![]()
ДПГ.
Для дискретных сигналов соотн-я ПГ должны выполнятся в полосе частот от 0 до частоты Найквиста. Т.о. частотная характеристика ДПГ имеет вид:
![]()
для всех целых k.
АЧХ ДПГ


Для нахождения ими. характеристики надо взять ОДПФ. И получим:
![]()
Дискретизуем с шагом T=2π/ωs и умножим на Т (по формуле):
![]()

Фильтр Гильберта физически нереализуем, т.к. ИХ бесконечна. Если ее усечь, то имеем

Выбросы вблизи частоты Найквиста (максимумы) порядка 18% (разл-е меандра в ряд Фурье – там был эффект Гиббса 9%, а здесь ±9% = 15%) - неравномерная сходимость ряда Фурье.
Лекция №12.
Дискретный корреляционный анализ.
Напомним, что
корреляционная функция центрированной
случайной величины
![]() равна:
равна:
![]() .
.
Это автокорреляционная
функция, аналогично для двух различных
случайных процессов вводится взаимная
корреляционная функция
![]() (cross
– correlation
function).
(cross
– correlation
function).
Корреляционная функция характеризует меру линейной статической связи между величинами.
КФ связана со спектральной плотностью мощности теоремой Винера-Хинчина:
![]() ;
;
![]() .
.
Чем быстрее убывает
КФ
![]() ,
тем слабее оказывается статическая
связь между мгновенными значениями
случайного сигнала в два различных
момента времени.
,
тем слабее оказывается статическая
связь между мгновенными значениями
случайного сигнала в два различных
момента времени.
Числовой
характеристикой, служащей для оценки
“скорости изменения” случайного
процесса, является интервал корреляции
![]() :
:
![]() .
.
Если известна информация о поведении какой-либо реализации случайного процесса в прошлом, то возможен вероятностный прогноз случайного процесса не более, чем на время .
Например, для
белого шума
![]() ,
т.е. его соседние отсчёты некоррелированны:
как бы ни мал был интервал между двумя
последовательными отсчётами, сигнал
за это время может измениться на любую
величину.
,
т.е. его соседние отсчёты некоррелированны:
как бы ни мал был интервал между двумя
последовательными отсчётами, сигнал
за это время может измениться на любую
величину.
Для дискретных сигналов КФ:
![]() здесь
j
– задержка.
здесь
j
– задержка.
Непосредственное вычисление корреляционной функции.
Рассмотрим N
значений случайной величины
![]() (
(![]() ),
предполагая процесс стационарным и
центрированным. По определению оценка
корреляционной функции при задержке
rT (T – интервал дискретизации):
),
предполагая процесс стационарным и
центрированным. По определению оценка
корреляционной функции при задержке
rT (T – интервал дискретизации):
![]()
r – называется
сдвигом, m – максимальным сдвигом,
![]() .
.
Число возможных
произведений в последнем выражении при
сдвиге r есть
![]() .
Следовательно, для получения несмещенной
оценки КФ деление в правой части нужно
производить на
.
Число действительных операций сложения
и умножения, в предположении, что
равно примерно
.
Следовательно, для получения несмещенной
оценки КФ деление в правой части нужно
производить на
.
Число действительных операций сложения
и умножения, в предположении, что
равно примерно
![]() .
.
Оценивание корреляционной функции методом ДПФ.
Косвенный метод
оценивания КФ основан на теореме
Винера-Хинчина. Оценка КФ находится как
обратное ДПФ оценки спектральной
плотности. Поскольку в основе преобразования
Фурье лежит предположение о периодичности
функции, получаемая таким образом КФ
носит циклический (круговой) характер.
Оценка КФ будет содержать вклад как от
![]() ,
так и от
,
так и от
![]() .
.
Пусть
![]() и
и
![]() - преобразование Фурье реализации
- преобразование Фурье реализации
![]()
![]() и его комплексное сопряжение:
и его комплексное сопряжение:
![]() ;
;
![]() ;
;
![]() .
.
Заменим переменные
![]() ,
,
![]() ,
,
![]() ,
и перепишем последнее равенство в виде:
,
и перепишем последнее равенство в виде:
![]() .
.
Оценка спектральной плотности мощности реализации :
![]() .
.
Меняя порядок интегрирования, имеем:

Положим
![]() ;
;
![]() имеем в первом слагаемом:
имеем в первом слагаемом:
![]()
(вместо
![]() подставим
подставим
![]() ).
Произведём ещё одну замену
).
Произведём ещё одну замену
![]() ;
;
![]() .
Имеем:
.
Имеем:
![]() .
.
Таким образом:
где
![]() .
.
Значит обратное
преобразование Фурье Функции
![]() ,
даст циклическую функцию корреляции.
В случае дискретной последовательности
,
даст циклическую функцию корреляции.
В случае дискретной последовательности
![]() она равна:
она равна:
![]() .
.
Графически это выглядит так.
!!!!!!!!!!!!!!!!!!!!!
При быстро затухающих
КФ эффект цикличности не играет особо
важной роли для значений максимальности
сдвига порядка
![]() .
Во всяком случае, этого осложнения можно
избежать, дополняя исходный временной
ряд нулями. В результате этого происходит
разделение обеих частей циклической
оценки КФ. В частности, при добавлении
.
Во всяком случае, этого осложнения можно
избежать, дополняя исходный временной
ряд нулями. В результате этого происходит
разделение обеих частей циклической
оценки КФ. В частности, при добавлении
![]() нулей к исходному временному ряду длины
происходит полное разделение.
нулей к исходному временному ряду длины
происходит полное разделение.
![]()
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Вторую половину можно отбросить, и окончательная оценка КФ находится в виде:
![]()
В зависимости от
![]() такой метод вычисления через БПФ может
потребовать значительно меньшего объёма
вычислений.
такой метод вычисления через БПФ может
потребовать значительно меньшего объёма
вычислений.
Такой косвенный
метод требует нахождения вначале
спектральной плотности по
![]() реализациям, содержащим
отсчётов и
нулей, так что БПФ подвергается реализация
длиной
реализациям, содержащим
отсчётов и
нулей, так что БПФ подвергается реализация
длиной
![]() .
Затем выполняется ОБПФ, что в общей
сложности даёт
.
Затем выполняется ОБПФ, что в общей
сложности даёт
![]() БПФ, каждое из которых требует
БПФ, каждое из которых требует
![]() операций, где
операций, где
![]() .
Для реализации эквивалентного объёма
вычислений
.
Для реализации эквивалентного объёма
вычислений
![]() прямой метод требует примерно
прямой метод требует примерно
![]() операций. Следовательно, при одном и
том же максимальном сдвиге
операций. Следовательно, при одном и
том же максимальном сдвиге
![]() коэффициент ускорения вычислений равен:
коэффициент ускорения вычислений равен:
 .
.
Например, при
![]() имеем
имеем
![]() .
На практике же, благодаря тому, что
оценим СПМ и КФ строятся для
последовательностей действительных
чисел применения БПФ позволяет повысить
скорость счёта ещё вдвое.
.
На практике же, благодаря тому, что
оценим СПМ и КФ строятся для
последовательностей действительных
чисел применения БПФ позволяет повысить
скорость счёта ещё вдвое.
Если длина исходной
реализации есть
![]() и
и
![]() ,
то последовательность вычисления КФ
такова.
,
то последовательность вычисления КФ
такова.
1. Выбирается
максимальный сдвиг
и исходная реализация разбивается на
отрезков, каждый из которых содержит
![]() отсчётов.
отсчётов.
2. Каждый отрезок
![]() дополняется
нулями, в результате чего каждый отрезок
содержит
отсчётов.
дополняется
нулями, в результате чего каждый отрезок
содержит
отсчётов.
3. Рассчитывается
с применением ДПФ
значений спектральной плотности
![]()
![]() .
.
4. По формуле:
 ,
,
рассчитывается
оценка СПМ для
![]() .
.
5. Осуществляется
обратное БПФ от последовательности
![]() .
.
6. Вторая половина
значений полученной последовательности
![]() отбрасывается и сохраняются лишь члены
для
отбрасывается и сохраняются лишь члены
для
![]() .
.
7. Почленно полученная
последовательность умножается на
масштабирующие коэффициенты
![]()
Этот алгоритм называется “быстрой корреляцией”.
Применение корреляционного анализа.
Оценка времени задержки.
Пусть движущаяся прозрачная среда просвечивается двумя источниками
!!!!!!!!!!!!!!!!!!!!!!!
света, а наблюдение
ведётся двумя фотодетекторами,
размещенными друг за другом на расстоянии
ℓ в направлении течения. Среда неоднородна,
поэтому оба детектора через некоторый
промежуток времени наблюдают одну и ту
же ситуацию и выдают сигналы соответственно
и
![]() .
При скорости жидкости V среда запаздывает
на
.
При скорости жидкости V среда запаздывает
на
![]() ,
,
т.е.
![]() .
.
Если рассчитать
ВКФ этих двух сигналов, то при
![]() имеем
имеем
![]() .
.
!!!!!!!!!!!!!!!!!!!!!!!!!!
Если мы найдём
максимум ВКФ
![]() ,
то зная базу ℓ, мы легко можем рассчитать
скорость течения в трубе.
,
то зная базу ℓ, мы легко можем рассчитать
скорость течения в трубе.
!!!!!!!!!!!!!!!!!!!!!!!!!
Определение угловой скорости.
Локализация пробоины в трубопроводах.
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
![]() .
.
![]() – скорость звука
в материале трубы, обычно
–
– скорость звука
в материале трубы, обычно
–
![]() .
.
Такие системы называются корреляционно-экстремальными.
Разностно-дальномерные (гиперболические) системы.
!!!!!!!!!!!!!!!!!!!!!!!!!!!
![]()
Решив эту систему
гиперболических уравнений, можно найти
координаты источника
![]() .
.
Так работают:
- системы локализации источников звука,
- системы определения местоположения сотовых телефонов,
- системы локализации гроз, цунами и других естественных катастрофических объектов,
- системы определения местоположения специсточников (артиллерии, снайперов и т.п.).
Система обратима. Если есть 4 спутника и 1 приемник, то можно найти координаты. Так работают системы GPS.
Сама функция передачи имеет вид:
 ,
,
координаты полинома рассчитываются по формуле:
![]() .
.
Фазовая и групповая задержка.
![]() .
.
При преобразовании сигнала линейной системой различают два вида задержки.
Фазовая задержка (phase delay) на частоте ω – это задержка гармонического сигнала с частотой ω при прохождении через систему. Значение фазовой задержки равно фазовому сдвигу, вносимому системой, деленному на частоту с противоположным знаком:
![]() ;
;
![]() .
.
Групповая задержка (group delay) на частоте ω – это задержка огибающей узкополосного сигнала с средней частотой ω. r3 равна производной от ФЧХ системы с противоположным знаком:
![]() .
.
Фазовая задержка – это задержка несущей, r3 – это задержка огибающей.
Всепропускающие фильтры.
Всепропускающими (allpass) называются фильтры АЧХ которых равна единице на всех частотах. Такие фильтры изменяют только фазы спектральных составляющих входного сигнала и используются например, для линеаризации ФЧХ (т.е. выравнивание групповой задержки, вносимой системой).
Рассмотрим функцию
передачи фильтра первого порядка,
имеющего один полюс
![]() и один нуль
и один нуль
![]() :
:
 .
.
Квадрат АЧХ этого фильтра:

Мы хотим, чтобы
квадрат АЧХ был равен единице на всех
частотах. Для этого необходимо, чтобы
коэффициенты при всех степенях
![]() в числителе и знаменателе были одинаковы.
в числителе и знаменателе были одинаковы.
![]()
![]()
![]()
Решение (тривиальное
![]() нас не интересует):
нас не интересует):
![]() ,
,
![]() (*)
(*)
Понятно, что если включить последовательно произвольно количество фильтров, удовлетворяющих условию (*), АЧХ будет по-прежнему равна единице на всех частотах.
Т.о. получены условия, при которых фильтр является всепропускающим:
- число нулей равно числу полюсов,
- значения нулей является обратным и комплексно-сопряженными по отношению к полюсам,
- коэффициент усиления k равен произведению модулей полюсов фильтра.
!!!!!!!!!!!!!!!!!!!!!!!!!!!!
!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Регулируя количество и расположение полюсов, можно получить ФЧХ любого вида.
Лекция № 13.
Преобразование аналоговых фильтров-прототипов.
Изменение частоты среза ФНЧ.
Сводится к простому масштабированию частотной оси и выполняется заменой переменной s в выражении функции передачи:
![]() ,
,
где
![]() – требуемая
частота среза ФНЧ.
– требуемая
частота среза ФНЧ.
Преобразование ФНЧ в ФВЧ.
Выполняется путём замены переменной s в функции передачи:
![]() ,
,
где – требуемая частота среза ФВЧ.
Преобразование ФНЧ в полосовой фильтр.
Здесь требуется более сложное трансформация частотной оси.
![]() ,
,
где
![]() ,
,
![]() ,
,
![]() и
и
![]() – соответственно нижняя и верхняя
границы полосы пропускания фильтра.
– соответственно нижняя и верхняя
границы полосы пропускания фильтра.
Преобразование ФНЧ в режекторный фильтр.
Осуществляется заменой переменной:
 ,
,
где
,
![]() ,
и
– соответственно нижняя и верхняя
границы полосы задерживания фильтра.
,
и
– соответственно нижняя и верхняя
границы полосы задерживания фильтра.
Цифровая фильтрация.
Нерекурсивные фильтры.
В общем случае при вычислении очередного выходного отсчёта дискретной системы используется информация двух видов: некоторое количество отсчётов входного сигнала и некоторое количество предыдущих отсчётов выходного сигнала. Ясно, что хотя бы один отсчёт входного сигнала должен участвовать в вычислениях: иначе выходной сигнал не будет зависеть от входного. А вот предыдущие отсчёты выходного сигнала могут и не использоваться. В этом случае уравнение фильтрации имеет вид:
![]() .
.
Количество используемых отсчётов m называется порядком фильтра. Структурная схема, реализующая это выражение выглядит так.

m предыдущих
отсчётов входного сигнала хранится в
ячейках памяти, которые образуют
дискретную линию задержки. Эти отсчёты
умножаются на коэффициенты
![]() и суммируются. Образуется выходной
отсчёт
.
и суммируются. Образуется выходной
отсчёт
.
Напоминание:
согласно свойствам Z-преобразования
задержка дискретной последовательности
на один такт соответствует умножению
её Z-преобразования
на
![]() .
Поэтому элементы памяти, осуществляющие
задержку обозначаются как “
”.
.
Поэтому элементы памяти, осуществляющие
задержку обозначаются как “
”.
Т.к. при вычислениях не используются предыдущие отсчёты, в схеме нет обратных связей. Поэтому такие фильтры называются нерекурсивными (conrecursive). Иногда применяется термин “транверсальный” фильтр (от англ. transversal – поперечный).
Импульсная
характеристика нерекурсивного фильтра
определяется очень просто. Подставим
в последнее уравнение в качестве входного
сигнала единичный импульс
![]() :
:
![]() .
.
Но насчёт
![]() равен нулю для всех k, кроме
равен нулю для всех k, кроме
![]() ,
тогда этот отсчёт равен единице. Поэтому
мы получаем очень простой результат:
,
тогда этот отсчёт равен единице. Поэтому
мы получаем очень простой результат:
![]() .
.
Т.о. коэффициенты
являются отсчётами импульсной
характеристики фильтра. Это можно
пояснить на рисунке. При подаче на вход
единичного импульса он будет перемещаться
вниз по линии задержки, умножаться на
коэффициенты
![]() и проходить на выход системы. В реальном
устройстве линия задержки содержит
конечное число элементов, поэтому
импульсная характеристика нерекурсивного
фильтра также конечна по длительности.
С этим связано ещё одно название таких
фильтров – фильтры с конечной импульсной
характеристикой (КИХ-фильтры, англ. FIR
– finite
impulse
response).
и проходить на выход системы. В реальном
устройстве линия задержки содержит
конечное число элементов, поэтому
импульсная характеристика нерекурсивного
фильтра также конечна по длительности.
С этим связано ещё одно название таких
фильтров – фильтры с конечной импульсной
характеристикой (КИХ-фильтры, англ. FIR
– finite
impulse
response).
Нерекурсивные фильтры широко применяются на практике благодаря следующим преимуществам:
- простота анализа и реализации,
- наглядная связь коэффициентов фильтра с отсчётами его импульсной характеристики,
- абсолютная устойчивость.
Однако для получения хороших частотных характеристик (например, полосовых фильтров с высокой прямоугольностью АЧХ) необходимы нерекурсивные фильтры очень высокого порядка – от нескольких сотен до нескольких тысяч.
Симметричные фильтры.
Очень важное значение имеет тот факт, что нерекурсивные фильтры позволяют легко обеспечить линейную ФЧХ, а значит постоянные, не зависящие от частоты групповую и фазовую задержки. Для этого необходима лишь симметрия импульсной характеристики. Эта симметрия может быть двух типов:
- чётная симметрия
(even
symmetry):
![]() для всех
для всех
![]() ;
;
- нечётная симметрия
(odd
symmetry):
![]() для всех
.
для всех
.
Характеристики с чётной симметрией называют симметричными, а с нечётной симметрией – антисимметричными.
Групповая задержка для симметричных фильтров не зависит от частоты и равна отсчётов.
При чётном N и
нечётной симметрии ИХ, очевидно, что её
средний отсчёт должен равняться нулю:
![]() .
Кроме того, чётность или нечётность
порядка фильтра и наличие того или иного
типа симметрии накладывают определённые
ограничения на коэффициенты передачи
фильтра на нулевой частоте и на частоте
Найквиста.
.
Кроме того, чётность или нечётность
порядка фильтра и наличие того или иного
типа симметрии накладывают определённые
ограничения на коэффициенты передачи
фильтра на нулевой частоте и на частоте
Найквиста.
Сочетание чётности порядка фильтра и типа симметрии и типа симметрии даёт четыре типа симметричных фильтров, это показано в таблице. Номера типов фильтров часто используют в литературе.
Типы симметричных фильтров.
Тип |
Порядок фильтра |
Тип симметрии |
|
|
I |
Чётный |
Чётная |
Любой |
Любой |
II |
Нечётный |
Чётная |
Любой |
0 |
III |
Чётный |
Нечётная |
0 |
0 |
IV |
Нечётный |
Нечётная |
0 |
Любой |
Это легко получить из типа симметрии и выражения для коэффициента передачи:
![]() .
.
Рекурсивные фильтры.
Если уравнение фильтрации имеет вид:
![]() ,
,
т.е. содержит как
выходные, так и выходные отсчёты, для
реализации такого фильтра в предыдущую
схему нужно добавить вторую линию
задержки – для хранения выходных
отсчётов
![]() .
Получаем такую структуру:
.
Получаем такую структуру:

Такая схема называется прямой реализацией рекурсивного фильтра. Т.к. при вычислениях используются предыдущие отсчёты выходного сигнала, в схеме присутствуют обратные связи. Поэтому такие фильтры называются рекурсивными (recursive).
Количество предыдущих входных отсчётов m и выходных отсчётов n может не совпадать. В этом случае порядком фильтра считается максимальное из чисел m и n:
![]() .
.
Импульсная
характеристика рекурсивного фильтра
рассчитывается сложнее, чем нерекурсивного.
Рассмотрим формирование нескольких
первых её отсчётов. При поступлении на
вход единичного импульса он умножается
на
![]() и проходит на выход.
и проходит на выход.
![]() .
.
Далее входной отсчёт попадает во входную линию задержки, а выходной отсчёт, равный - в выходную линию задержки. В результате второй отсчёт формируется как:
![]() .
.
На следующем такте получаем:
![]() .
.
Видно, что, по мере того, как выходная линия задержки заполняется отсчётами импульсной характеристики, сложность аналитических формул быстро возрастает.
Наличие в схеме обратных связей позволяет получить бесконечную импульсную характеристику, поэтому рекурсивные фильтры называют также фильтрами с бесконечной импульсной характеристикой (БИХ-фильтрами, англ. – infinite impulse response, IIR). По этой же причине рекурсивные фильтры могут быть неустойчивыми.
Формы реализации дискретных фильтров.
Последняя схема реализации рекурсивного фильтра называется прямой формой (direct form I). Она не является единственно возможной. Рассмотрим другие варианты.
Каноническая форма.
Разделим общий сумматор на два отдельных – для рекурсивной и нерекурсивной частей фильтра.

В результате получаем два последовательно соединённых фильтра – первый из которых является нерекурсивным, а второй, напротив, содержит только рекурсивную часть. Так как результат прохождения сигнала через ряд последовательных линейных стационарных устройств не зависит от последовательности их соединения, мы можем поменять местами две “половинки” нашего фильтра.

А теперь обратим внимание на то, что в обе линии задержки подаётся один и тот же сигнал. Поэтому они будут содержать одинаковые наборы отсчётов. Это позволяет объединить обе линии задержки. Полученная в результате схема называется канонической формой реализации рекурсивного фильтра.
С теоретической точки зрения оба варианта эквивалентны. Но с практической точки зрения необходимо отменить особенности, присущие обеим схемам. С одной стороны, при канонической реализации используется общая линия задержки, это уменьшает количество ячеек памяти.

Однако, при этом абсолютные величины отсчётов, “бегающих” в линии задержки, могут существенно превысить амплитуду входного и выходного сигналов. Это приводит к необходимости увеличить разрядность представления чисел в ЛЗ по сравнению с разрядностью входного и выходного сигналов. А это усложняет реализацию устройства. При прямой реализации в линиях задержки хранятся непосредственно отсчёты входного и выходного сигналов, т.е. повышенной разрядности линий задержки не требуется. Единственным элементом, требующим повышенной разрядности, здесь является сумматор. Это учтено в архитектуре микропроцессоров, специально предназначенных для обработки сигналов в реальном масштабе времени.
Транспонированная форма.
Поменяем в прямой схеме последовательность выполнения операций умножения и задержки. Будем использовать в каждой ветви отдельную линию задержки на нужное количество тактов. Разделим также общий сумматор на несколько двухвходовых сумматоров. Посмотрим, что получится.

Т еперь
рассмотрим любую пару соседних сумматоров.
Можно заметить, что суммируемые ими
сигналы до этого претерпели одинаковую
задержку. Это даёт возможность поменять
местами операции суммирования и задержки.
Получившаяся схема называется
транспонированной реализацией дискретного
фильтра (direct
transposed
form
II).
еперь
рассмотрим любую пару соседних сумматоров.
Можно заметить, что суммируемые ими
сигналы до этого претерпели одинаковую
задержку. Это даёт возможность поменять
местами операции суммирования и задержки.
Получившаяся схема называется
транспонированной реализацией дискретного
фильтра (direct
transposed
form
II).
В такой транспонированной схеме может быть реализован и нерекурсивный фильтр. Для этого необходимо удалить все ветви с коэффициентами , кроме .
Транспонированная схема позволяет эффективно распараллеливать вычисления и потому применяется при реализации дискретных фильтров в виде специализированных микросхем. Действительно, если реализовать фильтр в виде прямой форме можно одновременно выполнять все операции умножения, но для получения выходного результата необходимо дождаться окончания выполнения всех операций сложения. В транспонированной же схеме, помимо умножения, можно одновременно выполнять и все операции сложения, поскольку они являются независимыми (т.е. не используют в качестве суммируемых величин результаты других сложений). Из схемы видно, что собственно для расчёта выходного сигнала необходимо выполнить одно умножение и одно сложение, все остальные операции производят подготовку промежуточных результатов для вычисления последующих выходных отсчётов.
Если применить описанные преобразования к описанной раньше канонической структуре, получится ещё один вариант транспонированной реализации (direct transposed form I). Данная структура, в отличие от предыдущей, содержит больше число элементов памяти.
Последовательная (каскадная) форма.
Числитель и
знаменатель передаточной функции можно
разложить на линейные множители
относительно
![]() .
Перемножение функций передачи
соответствует последовательному (или,
как иначе говорят, каскадному) включению
соответствующих фильтров, поэтому такое
представление даёт реализацию фильтра
в виде последовательного включенных
фильтров 1-го порядка или 2-го порядка.
.
Перемножение функций передачи
соответствует последовательному (или,
как иначе говорят, каскадному) включению
соответствующих фильтров, поэтому такое
представление даёт реализацию фильтра
в виде последовательного включенных
фильтров 1-го порядка или 2-го порядка.
Рассмотрим конкретный пример.


Лекция №14.
Синтез дискретных фильтров.
Под синтезом (или
проектированием) дискретных фильтров
понимается выбор таких наборов
коэффициентов
![]() и
и
![]() ,
при которых характеристики получающегося
фильтра удовлетворяют заданным
требованиям. Строго говоря, в задачу
проектирования входит и выбор подходящей
структуры фильтра, а также и учёт конечной
разрядности вычислений. Это особо
актуально при реализации фильтров в
“железе” с использованием специализированных
БИС или сигнальных процессоров. Сейчас
же речь пойдёт именно о выборе коэффициентов
передачи
и
.
,
при которых характеристики получающегося
фильтра удовлетворяют заданным
требованиям. Строго говоря, в задачу
проектирования входит и выбор подходящей
структуры фильтра, а также и учёт конечной
разрядности вычислений. Это особо
актуально при реализации фильтров в
“железе” с использованием специализированных
БИС или сигнальных процессоров. Сейчас
же речь пойдёт именно о выборе коэффициентов
передачи
и
.
Методы синтеза цифровых фильтров можно классифицировать по таким признакам:
- по типу получаемого фильтра:
а) методы синтеза рекурсивных фильтров;
б) методы синтеза нерекурсивных фильтров;
- по наличию (отсутствию) аналогового прототипа:
а) методы синтеза с использованием аналогового прототипа;
б) прямые (без использования аналогового прототипа) методы синтеза
фильтров.
Синтез рекурсивных фильтров по аналоговому прототипу.
При синтезе
дискретного фильтра по аналоговому
прототипу необходимо реализовать
переход из s-области
в z-область,
т.е. преобразовать функцию передачи
аналогового фильтра
![]() в функцию передачи дискретного фильтра
.
Получающийся дискретный фильтр не может
быть полностью идентичен аналоговому
по своим характеристикам, уже хотя бы
потому, что частотные характеристики
дискретного фильтра являются
периодическими. Можно говорить только
об определённом соответствии характеристик
аналогового и дискретного фильтров.
в функцию передачи дискретного фильтра
.
Получающийся дискретный фильтр не может
быть полностью идентичен аналоговому
по своим характеристикам, уже хотя бы
потому, что частотные характеристики
дискретного фильтра являются
периодическими. Можно говорить только
об определённом соответствии характеристик
аналогового и дискретного фильтров.
Мы рассмотрим два метода синтеза рекурсивных дискретных фильтров по аналоговым прототипам:
- метод билинейного преобразования;
- метод инвариантной импульсной характеристики.
Метод билинейного Z-преобразования.
Метод позволяет синтезировать рекурсивный дискретный фильтр по частотной характеристике аналогового прототипа.
Функция передачи аналоговой системы представляют собой дробно-рациональную функцию переменной s (отношение двух полиномов). Чтобы получить функцию передачи дискретного фильтра, необходимо перейти из s-области в z-область. При этом дробно-рациональный характер функции должен сохраниться. Поэтому замена переменной s должна представлять собой также дробно-рациональную функцию переменной z. Чтобы частотные характеристики аналогового и дискретного фильтров были связаны простой зависимостью, искомая замена переменной должна отображать мнимую ось в s-области на единичную окружность в z-области. В этом случае частотные характеристики аналогового и дискретного фильтров будут связаны лишь трансформацией частотной оси и никаких искажений “по вертикали” не будет.
Простейшей из функций, удовлетворяющих перечисленным требованиям, является билинейное Z-преобразования (bilinear transformation):
![]() .
.
Частотные
характеристики аналогового
![]() и дискретного
и дискретного
![]() фильтров связаны лишь трансформацией
частотной оси:
фильтров связаны лишь трансформацией
частотной оси:
![]() ,
,
![]() .
.
На низких частотах,
когда
![]() ,
тангенс примерно равен своему аргументу,
так что:
,
тангенс примерно равен своему аргументу,
так что:
![]() ,
если
.
,
если
.
Поэтому в области
низких частот частотные характеристики
аналогового и дискретного фильтров
почти совпадают. Далее по мере ускорения
роста функции тангенса, частотная
характеристика дискретного фильтра
всё сильнее сжимается по горизонтали
(по сравнению с аналоговым прототипом),
и на частоте Найквиста, равной
![]() ,
достигает значения, которое частотная
характеристика аналогового фильтра
имела бы на бесконечной частоте.
,
достигает значения, которое частотная
характеристика аналогового фильтра
имела бы на бесконечной частоте.

При билинейном Z-преобразовании левая половина s-плоскости отображается внутрь единичной окружности на z-плоскости, поэтому синтез по устойчивому аналоговому прототипу даёт гарантированно устойчивый дискретный фильтр.
Для получения
дискретного фильтра с заданными частотами
среза необходимо скорректировать
частоты среза аналогового прототипа,
чтобы скомпенсировать искажения
частотной оси. Так, для синтеза дискретного
ФНЧ с частотой среза
![]() аналоговый фильтр-прототип должен иметь
частоту среза
аналоговый фильтр-прототип должен иметь
частоту среза
![]() ,
связанную с
следующим образом:
,
связанную с
следующим образом:
![]() .
.
Метод инвариантной импульсной характеристики.
Метод инвариантной импульсной характеристики (impulse invariance) позволяет синтезировать рекурсивный дискретный фильтр путём дискретизации импульсной характеристики аналогового прототипа.
Импульсная характеристика аналоговой системы может быть представлена в виде суммы экспоненциальных слагаемых:
![]()
и (при наличии кратных полюсов) слагаемых вида:
![]() .
.
Каждое из этих
слагаемых может быть дискретизировано
и воспроизведено в дискретном виде.
Экспоненциальные слагаемые вида
![]() после дискретизации дают последовательность
отсчётов:
после дискретизации дают последовательность
отсчётов:
![]() .
.
Z-преобразование этой последовательности равно:
![]() .
(Сумма убывающей геометрической
прогрессии).
.
(Сумма убывающей геометрической
прогрессии).
Такая функция передачи соответствует дискретному рекурсивному фильтру 1-го порядка.
Теперь займёмся
слагаемыми вида
![]() ,
соответствующим кратным полюсам. Такое
слагаемое даёт после дискретизации
последовательность отсчётов:
,
соответствующим кратным полюсам. Такое
слагаемое даёт после дискретизации
последовательность отсчётов:
![]() .
.
Z-преобразование
этой последовательности можно легко
рассчитать, если заметить, что она
представляет собой n-ю производную по
p от последовательности
![]() :
:
![]() .
.
Такая функция передачи, получаемая после вычисления n-й производной, соответствует дискретному рекурсивному фильтру n-го порядка.
Выполнив указанные преобразования всех слагаемых, мы получим дискретный фильтр, импульсная характеристика которого представляет собой дискретизированную версию импульсной характеристики аналогового прототипа.
Частотная характеристика получаемого фильтра связана с частотной характеристикой аналогового прототипа точно так же, как спектр дискретизированного сигнала связан со спектром сигнала аналогового – периодическим повторением. Поэтому для получения хороших результатов при таком методе синтеза коэффициент передачи аналогового прототипа должен быть пренебрежимо малым на частотах, превышающих частоту Найквиста. Отсюда следует также, что этот метод подходит для создания ФНЧ и полосовых фильтров, но непригоден для синтеза ФВЧ и режекторных фильтров. Пример показан на рисунке, чтобы уменьшить расхождение, надо увеличить частоту дискретизации.

Прямые методы синтеза.
Название “прямые методы” означает, что в данном случае не используется аналоговый прототип. Исходными данными для синтеза служат какие-либо параметры фильтра (чаще всего – его АЧХ), которые могут задаваться, вообще говоря, произвольно.
Прямые методы синтеза можно разделить на две категории:
- оптимальные методы, в которых численными итерационными методами ищется минимум заданной функции качества;
- субоптимальные методы, не дающие в точности оптимального решения, но позволяющие значительно упростить вычисления, по сравнению с оптимальными методами. Как правило, эти методы используют специфику решаемой задачи, например, дробно-рациональный вид функции передачи рекурсивного фильтра или экспоненциальный вид отдельных слагаемых его импульсной характеристики.
Оптимальные методы.
Чаще всего отправной
точкой при синтезе фильтра служит его
желаемая частотная характеристика –
либо АЧХ (когда фазовые характеристики
не важны), либо комплексный коэффициент
передачи. В качестве минимизируемой
меры отклонения характеристики фильтра
от заданной в общем случае используется
p-норма ошибки. Такая норма
![]() для функции
для функции
![]() ,
определённой на интервале от а до b,
рассчитывается следующим образом:
,
определённой на интервале от а до b,
рассчитывается следующим образом:
 .
.
Чаще всего
используется два значения p:
![]() и
и
![]() .
При
норма
.
При
норма
![]() пропорциональна среднеквадратическому
отклонению функции. При
пропорциональна среднеквадратическому
отклонению функции. При
![]() норма
норма
![]() даёт максимальное по модулю значение
функции, достигаемое на рассматриваемом
интервале. Поскольку корень степени p
(показатель
даёт максимальное по модулю значение
функции, достигаемое на рассматриваемом
интервале. Поскольку корень степени p
(показатель
![]() )
при любом p является монотонно возрастающей
функцией, при расчёте минимизируемой
величины его можно не вычислять.
)
при любом p является монотонно возрастающей
функцией, при расчёте минимизируемой
величины его можно не вычислять.
Если при синтезе
фильтра нас интересует только его АЧХ,
p-норма ошибки
![]() рассчитывается следующим образом:
рассчитывается следующим образом:
 ,
,
где
![]() – желаемая АЧХ,
– желаемая АЧХ,
![]() –
АЧХ фильтра,
– неотрицательная
вещественная весовая функция.
–
АЧХ фильтра,
– неотрицательная
вещественная весовая функция.
Использование весовой функции позволяет придать разную значимость различным участкам частотной оси. В частности, это даёт возможность задавать переходные зоны, поведение АЧХ в которых не имеет особого значения. В этих зонах значение весовой функции должно быть нулевым.
Если необходимо аппроксимировать заданную частотную зависимость комплексного коэффициента передачи, норма ошибки аппроксимации рассчитывается так:
 ,
,
здесь
![]() – желаемая комплексная частотная
характеристика,
– желаемая комплексная частотная
характеристика,
![]() – частотная характеристика реального
фильтра.
– частотная характеристика реального
фильтра.
В большинстве
случаев сформулированные задачи
минимизации не имеют аналитического
решения. Исключения составляет синтез
нерекурсивного фильтра при
,
когда рассматриваемая оптимизационная
задача приводится к системе линейных
уравнений относительно коэффициентов
фильтра. При этом, если весовая функция
не используется (т.е. если
![]() ),
то коэффициенты фильтра представляют
собой коэффициенты разложения желаемой
частотной характеристики в ряд Фурье.
Однако минимизация среднеквадратичной
ошибки приводит к большим выбросам,
появляющимся в АЧХ при попытке
аппроксимировать её скачкообразное
поведение. Это связано с явлением
(эффектом) Гиббса.
),
то коэффициенты фильтра представляют
собой коэффициенты разложения желаемой
частотной характеристики в ряд Фурье.
Однако минимизация среднеквадратичной
ошибки приводит к большим выбросам,
появляющимся в АЧХ при попытке
аппроксимировать её скачкообразное
поведение. Это связано с явлением
(эффектом) Гиббса.
В общем случае, как уже говорилось, задача не имеет аналитического решения. Поэтому она должна решаться итерационными численными методами. Для уменьшения эффекта Гиббса можно использовать наложение ограничений на предельное абсолютное отклонение частотной характеристики от заданной.
При рассматриваемая норма ошибки равна максимальному абсолютному отклонению характеристики от заданной. Минимизация этой нормы соответствует минимаксной аппроксимации (mini max approximation) и даёт фильтры с равномерными пульсациями АЧХ (equiripple filters). Для минимаксного синтеза нерекурсивных фильтров используется метод чебышевской аппроксимации с использованием алгоритма многократной замены Ремеза. Соответствующий алгоритм расчёта применительно к синтезу дискретных фильтров разработан Парисом и Мак-Клелланом (T.W. Parks, J.H.McClellan).
Субоптимальные методы.
Эти методы позволяют упростить вычисления за счёт учёта специфики решаемой задачи. При этом, в частности, может использоваться тот факт, что коэффициенты передачи числителя функции передачи линейно связано с его комплексной частотной характеристикой. Поэтому они влияют на её форму значительно слабее, чем коэффициенты знаменателя.
Субоптимальный синтез нерекурсивных фильтров.
Синтез с использованием окон.
Данный метод излагается в курсе МСКИТ. Он предназначен для синтеза нерекурсивных фильтров. Идея метода очень проста. Прежде всего мы задаём желаемый комплексный коэффициент передачи в виде непрерывной функции. Эта функция определена в диапазоне частот от нуля до частоты Найквиста (если синтезируется вещественный фильтр) или до частоты дискретизации (если синтезируется комплексный фильтр). Обратное преобразование Фурье этой характеристики, вычисленное с учётом её периодичного характера, даёт бесконечную в обе стороны последовательность отсчётов импульсной характеристики. Для получения реализуемого нерекурсивного фильтра заданного порядка эта последовательность усекается – из неё выбирается центральный фрагмент нужной длины.
Простое усечение последовательности отсчётов импульсной характеристики соответствует наложению прямоугольного окна. Из-за усечения первоначальная заданная частотная характеристика искажается – она сворачивается со спектром окна. В результате появляются переходные полосы между областями пропускания и задерживания, наблюдаются колебания коэффициента передачи в полосах пропускания, а в полосах задерживания АЧХ, как правило, приобретает лепестковый характер.
Для ослабления перечисленных эффектов и прежде всего для уменьшения уровня боковых лепестков в полюсах задерживания усечённая импульсная характеристика умножается на весовую функцию (окно, weighting function), плавно спадающая к краям.
Мы уже говорили о весовых функциях применительно к периодограммному спектральному анализу и видели, что различные используемые в практике весовые окна имеют различный уровень боковых лепестков. Однако величина боковых лепестков собственного спектра окна не совпадает с величиной лепестков АЧХ фильтра, синтезированного с помощью данного окна.
Сведения об уровне лепестков, достигаемом при синтезе ФНЧ с использованием различных окон, приведены в таблице.
Для окон Кайзера и Чебышева результаты зависят от дополнительных параметров этих окон. Для окна Кайзера есть эмпирическая формула, связывающая параметр α с уровнем боковых лепестков при синтезе ФНЧ:
Тип окна |
Уровень боковых лепестков, дБ |
Прямоугольное |
|
Тьюни |
|
Треугольное |
|
Бартлетта |
|
Хана |
|
Бартлетта-Ханна |
|
Хэмминга |
|
Гауссово |
|
Блэкмена |
|
Натолла |
|
Кайзера,
|
|
Кайзера,
|
|
Чебышева,
|
|
Чебышева,
|
|
Чебышева,
|
|
![]()
![]()
Кроме уровня
боковых лепестков, есть и другие параметры
качества фильтра. Так, например, окно с
плоской вершиной, имеющее уровень
боковых лепестков
![]() обеспечивает очень малые колебания АЧХ
в полосе пропускания (сотые – тысячные
доли децибела).
обеспечивает очень малые колебания АЧХ
в полосе пропускания (сотые – тысячные
доли децибела).
Фильтры с косинусоидальным сглаживанием АЧХ.
Строго говоря, синтез фильтров с косинусоидальным сглаживанием АЧХ есть тоже метод, основанный на весовых функциях. Однако отдельно они рассматриваются отдельно по двум причинам:
- они получили широкое распространение в системах телекоммуникаций;
- данный метод удобно рассматривать с несколько иной точки зрения, чем использование окон вообще.
Пусть нам необходимо
синтезировать ФНЧ с заданной частотой
среза. Обсуждая использование окон, мы
видели, что обратное преобразование
Фурье от идеальной прямоугольной АЧХ
даёт отсчёты бесконечной в обе стороны
импульсной характеристики вида
![]() .
Простое усечение этой импульсной
характеристики плохо сказывается на
АЧХ. Поэтому надо использовать весовые
функции. Подумаем, от чего может зависеть
степень проявления нежелательных
эффектов при усечении бесконечных
импульсных характеристик. Для
ИХ убывает пропорционально k. Если
увеличить скорость спадания (или
затухания) ИХ, наверное, можно надеяться,
что её усечение скажется на АЧХ не столь
катастрофически. Для ускорения спада
импульсной характеристики необходимо
изменить требуемую АЧХ так, чтобы она
не содержала разрывов. Здесь может быть
полезным косинусоидальное сглаживание,
при котором в переходной зоне от полосы
пропускания к полосе задерживания АЧХ
представляет собой половину периода
косинуса. Такой фильтр называется
фильтром с косинусоидальным сглаживанием
АЧХ (raised
cosine
filter)
для аналогового случая он записывается
в виде:
.
Простое усечение этой импульсной
характеристики плохо сказывается на
АЧХ. Поэтому надо использовать весовые
функции. Подумаем, от чего может зависеть
степень проявления нежелательных
эффектов при усечении бесконечных
импульсных характеристик. Для
ИХ убывает пропорционально k. Если
увеличить скорость спадания (или
затухания) ИХ, наверное, можно надеяться,
что её усечение скажется на АЧХ не столь
катастрофически. Для ускорения спада
импульсной характеристики необходимо
изменить требуемую АЧХ так, чтобы она
не содержала разрывов. Здесь может быть
полезным косинусоидальное сглаживание,
при котором в переходной зоне от полосы
пропускания к полосе задерживания АЧХ
представляет собой половину периода
косинуса. Такой фильтр называется
фильтром с косинусоидальным сглаживанием
АЧХ (raised
cosine
filter)
для аналогового случая он записывается
в виде:
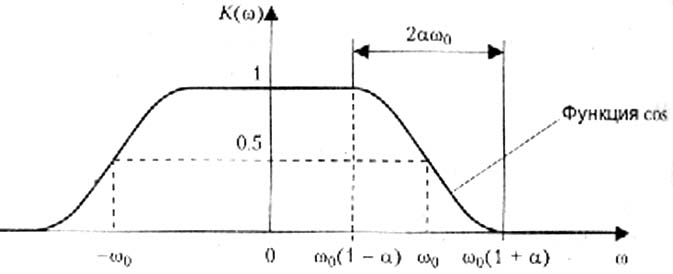
Параметр α называется
коэффициентом сглаживания (rolloff
factor),
он равен половине ширины переходной
зоны, нормированной к частоте среза.
При
![]() фильтр превращаетсяв идеальный ФНЧ с
прямоугольной АЧХ, при
фильтр превращаетсяв идеальный ФНЧ с
прямоугольной АЧХ, при
![]() АЧХ состоит из двух полупериодов косинуса
и не имеет плоского участка в полосе
пропускания.
АЧХ состоит из двух полупериодов косинуса
и не имеет плоского участка в полосе
пропускания.
Заметим, что АЧХ фильтра может быть получена кА свёртка идеальной прямоугольной АЧХ с функцией в виде половины периода косинуса.


Такой спектр соответствует временному сигналу:
 .
.
Свёртка спектров соответствует перемножению временных функций, так что полученнон выражение – это, по сути дела – весовая функция (левая картинка).
При
![]()
![]() даёт неопределённость
вида
даёт неопределённость
вида
![]() .
Вычисление предела показывает, что
значение весовой функции в этих точках
равно
.
Вычисление предела показывает, что
значение весовой функции в этих точках
равно
![]() :
:
![]() .
.
С учётом всего вышеизложенного получаем выражение для ФНЧ с косинусоидальным сглаживаем АЧХ:
 .
.
Предложенный метод
сглаживания делает непрерывный не
только саму АЧХ, но и её первую производную.
Поэтому полученная ИХ убывает
пропорционально
![]() .
.
SQRT - вариант.
Фильтры с косинусноидальным сглаживанием АЧХ, как уже говорилось, часто используются в системах связи для формирования спектра сигнала. При этом иногда используется идея “распределения” этого фильтра между передатчиком и приёмником. Тогда на передающей и приемной сторонах используются одинаковые фильтры. АЧХ их представляют квадратный корень из предыдущей АЧХ:


Фильтр такого типа называется SQRT – вариантом фильтра с косинусоидальным сглаживанием (srquare root raised cosine filter).
Лекция № 15.
Изменение частоты дискретизации.
При решении
различных задач приходится увеличивать
или уменьшать частоту дискретизации
сигналов. Это необходимо, например, для
согласования различных стандартов
хранения и передачи цифровой информации.
Классическим примером является
преобразованием аудиозаписей из формата
CD
(частота дискретизации
![]() )
и цифровой магнитной записи R-DAT
(частота дискретизации
)
и цифровой магнитной записи R-DAT
(частота дискретизации
![]() ).
).
Приведённый пример не очень простой. В нём коэффициент преобразования частоты дискретизации не является целым числом. В зависимости от значения коэффициента преобразования частоты дискретизации выделяют следующие варианты:
- интерполяция (interpolation) – повышение частоты дискретизации в целое число раз;
- прореживание (decimation) – понижение частоты дискретизации в целое число раз;
- передискретизация (resampling) – изменение частоты дискретизации в произвольное, в общем случае, дробное число раз.
Рассмотрим подробно каждый из случаев.
Прореживание (децимация).
Казалось бы, ломать – не строить, и для понижения частоты дискретизации в N раз достаточно взять из исходной последовательности каждый N отсчёт. В принципе это так и есть, но в этом процессе существует некоторые побочные эффекты.
Дело в том, что в процессе прореживания мы дискретизируем дискретный сигнал. При этом имеют место все эффекты, связанные с дискретизацией, о которых мы говорили, в том числе и появление ложных частот.


Если в спектре исходного (прореживание) сигнала содержатся частоты, превышающие половину новой частоты дискретизации (новую частоту Найквиста), это приведёт к появлению в спектре ложных частот.
Для устранения этого нежелательного эффекта следует, как и при дискретизации аналогового сигнала пропустить сигнал через ФНЧ с частотой среза, равной новой частоте Найквиста.
В результате полная структура устройства, выполняющего прореживания, включает в себя каскадно соединенные ФНЧ и блок понижения частоты дискретизации.

Чтобы сохранить фазовые соотношения во входном случае, следует использовать нерекурсивный фильтр с линейной ФЧХ. Использование нерекурсивного фильтра позволяет весьма эффективно организовать вычисления. Поскольку нас интересует только каждый N-й отсчёт выходного сигнала, остальные отсчёты можно не вычислять. При этом можно считать, что сигнал “заталкивается” в линию задержки фильтра порциями по N отсчётов. Если использовать рекурсивный фильтр, такой экономии добиться не удается – из-за наличия обратных связей придётся вычислять весь выходной сигнал фильтра и только потом отбрасывать лишние отсчёты.
Следует отметить две необычные особенности операции прореживания.
1) Прореживание
представляет собой один из немногих
процессов, которые не инвариантны во
времени. Если мы задержим входной сигнал
на один отсчёт, система прореживания
выдаст на выход совершенно другую
последовательность. Например, если мы
подадим на вход блока прореживания
последовательность
![]() и назначим коэффициент прореживания,
равным 3, выходной сигнал
и назначим коэффициент прореживания,
равным 3, выходной сигнал
![]() будем выглядеть так:
будем выглядеть так:
![]() .
Если же мы задержим входную последовательность
на один отсчёт
.
Если же мы задержим входную последовательность
на один отсчёт
![]() ,
выходная последовательность
,
выходная последовательность
![]() будет равно:
будет равно:
![]() .
Следовательно, процесс прореживания
не инвариантен во времени.
.
Следовательно, процесс прореживания
не инвариантен во времени.
2) Прореживание не
приводит к уменьшению амплитуды сигнала
во временной области. Однако прореживание
в D раз вносит потери амплитуды в частотной
области в D раз. Пусть ДПФ от синусоидального
сигнала
![]() длиной в 300 отсчётов есть
длиной в 300 отсчётов есть
![]() .
Если мы проредим
в
.
Если мы проредим
в
![]() ,
получим последовательность
,
получим последовательность
![]() длиной в 100 отсчётов. Амплитуда ДПФ
сигнала
будет
длиной в 100 отсчётов. Амплитуда ДПФ
сигнала
будет
![]() .
.
Всегда, когда есть возможность прореживания без искажений, нужно использовать прореживание.
Преимущества
прореживания: понижение частоты
дискретизации
![]() :
:
1) снижает требуемую вычислительную мощность (количество операций в секунду);
2) снижает количество отсчётов во временной области, которое необходимо обработать, это позволяет ускорить вычисления и обрабатывать более широкополосные сигналы;
3) позволяет уменьшить стоимость аппаратных компонент за счёт снижения тактовых частот;
4) уменьшает потребляемую мощность (что особо важно при батарейном питании);
5) позволяет увеличить отношение сигнал/шум за счёт предварительной фильтрации, за которой следует собственно прореживание.
Интерполяция.
При интерполяции необходимо повысить частоту дискретизации в N раз, т.е. “растянуть” входной сигнал, а образовавшиеся промежутки между отсчётами чем-то заполнить.
Подобно тому, как прореживание сводится к дискретизации дискретного сигнала, процесс интерполяции подобен процессу восстановления непрерывного сигнала, только происходящему в дискретной области.

Исходный сигнал имеет периодический спектр, повторяющийся с частотой дискретизации (рис.а).


Прежде всего, мы “растягиваем” этот сигнал, добавляя между его отсчётами по нулей. Эта операция называется повышением частоты дискретизации (up sampling). Выполняющий её блок обозначается так:
![]()
После вставки
нулей частота дискретизации станет
равна
![]() ,
но период повторения спектра останется
прежним, т.е.
(рис.б). Теперь необходимо пропустить
полученный сигнал через ФНЧ с частотой
среза
,
но период повторения спектра останется
прежним, т.е.
(рис.б). Теперь необходимо пропустить
полученный сигнал через ФНЧ с частотой
среза
![]() (его идеализированная АЧХ показана
пунктиром). В результате фильтрации
получится интерполированный сигнал,
частота дискретизации которого равна
,
а спектр в полосе частот от нуля до
остался прежним (рисунок в).
(его идеализированная АЧХ показана
пунктиром). В результате фильтрации
получится интерполированный сигнал,
частота дискретизации которого равна
,
а спектр в полосе частот от нуля до
остался прежним (рисунок в).
Т.о. полная структура устройства, выполняющего интерполяцию, включает в себя каскадно соединенные блок повышения частоты дискретизации и ФНЧ:
![]()
Для сохранения фазовых соотношений в сигнале следует использовать нерекурсивный фильтр с линейной ФЧХ. Поскольку в линии задержки фильтра в каждый момент содержится большое количество нулевых отсчётов и положения этих отсчётов на каждом шаге заранее известны, при реализации алгоритма можно сэкономить время вычислений, игнорируя арифметические операции с этими отсчётами.
Отметим, что из-за разбавления нулями процесс интерполяции приводит к потере амплитуды в N раз. Следовательно, чтобы сохранить амплитудные соотношения в сигнале, фильтр интерполяции должен иметь коэффициент усиления, равный N.
Может создаться впечатление, что интерполяция – порождение современной теории ЦОС. На самом деле, это не так. Древние астрономические таблицы, написанные клинописью (составленные в Уруги и Вавилоне за 200 лет до н.э.), показывают, что для заполнения пропущенных клеток в таблицах положения небесных тел, когда атмосферные условия препятствовали прямым наблюдением, использовалась линейная интерполяция. Прецеденты применения интерполяции для заполнения пропущенных данных с тех времён используются довольно часто.
Передискретизация.
Если коэффициент изменения частоты дискретизации не является целым числом, но может быть представлен в виде рациональной дроби, используется процедура передисктеризации (resampling).
Передисктретизация
– это сочетание интерполяции и
прореживания. Если исходную частоту
дискретизации необходимо умножить на
![]() ,
сначала выполняется интерполяция с
коэффициентом р, а затем прореживание
с коэффициентом q. Однако в этом случае
будет выполняться много лишних операций,
которые могут быть устранены при
оптимальной организации вычислений.
,
сначала выполняется интерполяция с
коэффициентом р, а затем прореживание
с коэффициентом q. Однако в этом случае
будет выполняться много лишних операций,
которые могут быть устранены при
оптимальной организации вычислений.
Рассмотрим последовательность действий, выполняемых при последовательном осуществлении интерполяции и прореживания.
1. Метод отсчётами
входного сигнала вставляется по
![]() нулей.
нулей.
2. Полученный сигнал пропускается через ФНЧ с частотой среза .
3. Полученный сигнал
пропускается через ФНЧ с частотой среза
![]() .
.
4. Из полученного сигнала выбирается каждый q-й отсчёт.
Шаги 1, 2 относятся к процессу интерполяции, 3, 4 – к процессу прореживания.
Первое, что можно заметить – это последовательное пропускание сигнала через два ФНЧ с разными частотами среза. Очевидно, что фильтр с большей частотой среза является избыточным. Поэтому можно оставить только один ФНЧ с меньшей частотой среза. При повышении частоты дискретизации эта частота равна частоте Найквиста входного сигнала, при понижении – частоте Найквиста выходного сигнала.
Вторая модификация та же, что рассматривалась ранее при обсуждении процесса прореживания. Поскольку нас интересует лишь каждый q-й отсчёт фильтрованного сигнала, нет смысла выполнять фильтрующие вычисления для всех отсчётов. Наконец, как и в случае интерполяции, в линии задержки в каждый момент содержится большое количество нулевых отсчётов, которые можно игнорировать при вычислениях.
С учётом сказанного последовательность действий передискретизации будет выглядеть следующим образом.
1. Между отсчётами входного сигнала вставляется по нулей.
2. Полученный сигнал
порциями по q отсчётов “заталкивается”
в ФНЧ с частотой среза, равной
![]() .
результаты фильтрации для этих порций
являются отсчётами сигнала с частотой
дискретизации
.
результаты фильтрации для этих порций
являются отсчётами сигнала с частотой
дискретизации
![]() .
При фильтрации игнорируются арифметические
операции с отсчётами, имеющими нулевые
значения.
.
При фильтрации игнорируются арифметические
операции с отсчётами, имеющими нулевые
значения.
Следует отметить,
что ФНЧ в данной схеме работает на
повышенной частоте дискретизации,
равной
![]() .
.
Шум квантования.
Цифровым системам
присущ определённый вид шумов, который
присутствует всегда, даже при полном
отсутствии помех. Этот шум связан с тем,
что при представлении отсчётов дискретного
сигнала в виде чисел с ограниченной
размерностью происходит их округления.
Разность между исходным и округлённым
значениями называется шумом квантования
![]() .
.
Пусть в результате
квантования гармонического сигнала
![]() получается результат его квантования
получается результат его квантования
![]() .
При этом возникает шум квантования:
.
При этом возникает шум квантования:
![]() .
.
Очевидно, что значения шума квантования лежат в пределах:
![]() ,
,
где Δ – расстояние между соседними уровнями квантования.
Здесь мы предполагали, что при квантовании значения уровня сигнала округляется. В Реальных АЦП вместо этого может осуществляться усечение, т.е. округление в сторону меньшего значения. Тогда:
![]() .
.
В большинстве
случаев можно считать
случайным процессом, имеющим равномерную
плотность распределения в указанных
пределах. Такой случайный процесс (для
округления) имеет нулевое среднее
значение и дисперсию
![]() .
(В случае усечения соответственно
.
(В случае усечения соответственно
![]() и
).
и
).
После дискретизации
шум квантования представляет собой
последовательность чисел
![]() ,
образующую дискретный случайный процесс.
,
образующую дискретный случайный процесс.
Рассмотрим отношение сигнал/шум (ОСШ, signal-to-noise ration, SNR) при квантовании гармонического сигнала. Пусть квантованию подвергается гармонический сигнал с амплитудой А. Отношение сигнал/шум есть отношение этой амплитуды к среднеквадратическому значению шума квантования:
![]() ,
,
где
![]() – число уровней квантования, укладывающихся
в размахе сигнала. АЦП, имеющий q двоичных
разрядов, обеспечивает
– число уровней квантования, укладывающихся
в размахе сигнала. АЦП, имеющий q двоичных
разрядов, обеспечивает
![]() уровней квантования. Если размах сигнала
соответствует полному рабочему диапазону
АЦП, то
уровней квантования. Если размах сигнала
соответствует полному рабочему диапазону
АЦП, то
![]() .
.
Выразим это число в децибелах:
![]() .
.
Т.е. добавление
(уменьшение) одного бита в АЦП уменьшает
(увеличивает) шум квантования на
![]() .
.
Неравномерное квантование.
Равномерное квантование, о котором шла речь до сих пор, гарантирует, что размах шума квантования не будет превосходить величины шага квантования (за исключением тех случаев, когда значение входного сигнала выходит за допустимые пределы). Однако если потребовать минимизации среднеквадратического значения шума квантования, оптимальный набор уровней квантования будет зависеть от статических свойств сигнала, а именно от плотности вероятности его мгновенных значений.
В этом случае интуитивно ясно, что уровни квантования должны располагаться плотнее друг к другу в областях тех значений, которые сигнал принимает с большей вероятностью.
Идея неравномерного
квантования в общем случае формулируется
следующим образом: диапазон возможных
значений сигнала делится на N зон
квантования
![]() Зонам квантования сопоставлены
квантованные значения
Зонам квантования сопоставлены
квантованные значения
![]() .
Если входной сигнал попадает в диапазон
.
Если входной сигнал попадает в диапазон
![]() ,
его квантованное значение принимается
равным
,
его квантованное значение принимается
равным
![]() .
.
Итак, пусть сигнал
имеет плотность вероятности
![]() и мы хотим осуществить его N-уровневое
квантование так, чтобы сделать нулевым
среднее значение и минимизировать
дисперсию шума квантования. Среднее
значение ошибки квантования е будет
равно:
и мы хотим осуществить его N-уровневое
квантование так, чтобы сделать нулевым
среднее значение и минимизировать
дисперсию шума квантования. Среднее
значение ошибки квантования е будет
равно:
 ,
,
где
![]() – математическое ожидание сигнала х,
а
– математическое ожидание сигнала х,
а
![]() – вероятность
попадания сигнала в k-ю зону квантования.
– вероятность
попадания сигнала в k-ю зону квантования.
Средний квадрат ошибки рассчитывается как:
 .
.
Приравнивание к
нулю частных производных этого выражения
по
![]() и
и
![]() даёт следующие соотношения для оптимальных
параметров квантования:
даёт следующие соотношения для оптимальных
параметров квантования:
 ,
,
![]() .
(*)
.
(*)
Данные формулы при известной плотности вероятности дают систему нелинейных уравнений относительно и . Аналитическое решение этой системы даже для несложных функций оказывается весьма непростым и его в большинстве случаев приходится искать численными методами.
Замечание. Выполнение условий (*) автоматически обеспечивает и нулевое среднее значение шума квантования.
Если формула для плотности вероятности сигнала неизвестна, но имеется “типичный” набор его отсчётов, можно произвести оптимизацию параметров квантования по этому тестовому набору. Поиск оптимальных значений и в этом случае производится численным итерационным методом.
Неравномерное квантование применяется, например, в современных цифровых телефонных сетях. Малые значения речевого сигнала более вероятны, чем большие, поэтому используется нелинейное преобразование сигнала, когда диапазон значений, при равномерном квантовании представляемый 12 двоичными разрядами (4096 уровней), квантуется на 256 (8 двоичных разрядов) неравномерно расположенных уровней согласно Рекомендации ITU-T G.711. Зависимость уровня квантования от его номера представляет собой кусочно-линейную аппроксимацию экспоненциального закона. В цифровых каналах связи передаются 8-разряд- ные номера уровней квантования, а при цифро-аналоговом преобразовании они конвертируются в 12-разрядные значения соответствующих им уровней сигнала.
Лекция № 16.
Телекоммуникационные системы.
Модуляция и демодуляция.
При создании систем передачи информации в большинстве случаев оказывается, что спектр исходного сигнала, подлежащего передаче, сосредоточен совсем не на тех частотах, которые эффективно пропускают существующие каналы связи.
Кроме того, очень часто необходимо в одном и том же канале связи передавать несколько сигналов одновременно. Одним из путей решения этой проблемы является использование частотного разделения каналов, при котором разные сигналы передаются на разных частотах, полосы которых не перекрываются.
Далее, во многих
случаях требуется, чтобы передаваемый
сигнал был узкополосный. Это означает,
что эффективная ширина спектра должна
быть меньше его центральной частоты:
![]() .
.
Все эти причины приводят к такой трансформации сигнала, чтобы требования, предъявляемые сигналу по занимаемой им полосе частот были выполнены, а сам исходный сигнал можно было восстановить.
Решение указанной задачи достигается при использовании модуляции (modulation). Сущность модуляции заключается в следующем. Формируется некоторое колебание (чаще всего гармоническое), которое называется несущей частотой, или просто несущей (carrier). Какой-либо из параметров этого колебания изменяется во времени пропорционально исходному сигналу, который надо передать. Исходный сигнал называют модулирующим (modulating signal), а результирующее колебание с изменяющимися во времени параметрами – модулированным сигналом (modulated signal). Обратный процесс, который осуществляется в точке приёма сигнала и состоящий в выделении модулирующего сигнала из модулированного колебания, называется демодуляцией (demodulation).
Запишем гармонический сигнал общего вида:
![]() .
.
У него есть три
параметра: амплитуда А, частота
![]() и начальная фаза
и начальная фаза
![]() .
Каждый из них можно связать с модулирующим
сигналом. Таким образом получается три
основных вида модуляции: амплитудная,
частотная и фазовая. Далее мы увидим,
что частотная и фазовая модуляция тесно
связаны, поскольку обе они связаны с
аргументом функции косинуса. Поэтому
эти два вида модуляции называются общим
названием – угловая модуляция.
.
Каждый из них можно связать с модулирующим
сигналом. Таким образом получается три
основных вида модуляции: амплитудная,
частотная и фазовая. Далее мы увидим,
что частотная и фазовая модуляция тесно
связаны, поскольку обе они связаны с
аргументом функции косинуса. Поэтому
эти два вида модуляции называются общим
названием – угловая модуляция.
В современных системах коммуникации получила также распространение квадратурная модуляция, при которой одновременно меняются амплитуда и фаза.
Амплитудная модуляция.
Как следует из названия при амплитудной модуляции (АМ, англ. – amplitude modulation, AM) в соответствии с модулирующим сигналом изменяется амплитуда несущего колебания:
![]() .
.
Однако, если
амплитуду
![]() сделать просто пропорциональной
модулирующему сигналу, возникает
определённая проблема. Как правило,
модулирующий сигнал является двухполярным
(знакопеременным).
сделать просто пропорциональной
модулирующему сигналу, возникает
определённая проблема. Как правило,
модулирующий сигнал является двухполярным
(знакопеременным).
!!!!!!!!!!!!!!!!!!!!!!!!
!!!!!!!!!!!!!!!!!!!!!!!!
Из графиков видно, что амплитудная огибающая, которая будет выделена в процессе демодуляции, в таком случае будет неправильной – она соответствует не исходному сигналу, в его модулю. Поэтому при реализации АМ к модулирующему сигналу предварительно добавляют постоянную составляющую, чтобы сделать его однополярным.
![]() .
.
В этом случае форма амплитудной огибающей соответствует модулирующему сигналу с точностью до постоянной составляющей, которая легко удаляется после демодуляции.
Итак, окончательно АМ-сигнал можно записать в виде:
![]() .
.
Однотональная АМ.
Для понимания сути амплитудной модуляции и спектральной структуры АМ-сигнала полезно подробнее проанализировать частный случай, когда модулирующий сигнал является гармонической:
![]() ,
,
![]() .
.
Отношение амплитуд
модулирующего сигнала
![]() и несущего колебания
и несущего колебания
![]() называется коэффициентом модуляции
или глубиной модуляции.
называется коэффициентом модуляции
или глубиной модуляции.
![]() .
.
Тогда можно записать:
![]() .
.
Очевидно, что максимальное значение огибающей однотонального АМ-сигнала достигается тогда, когда оба косинуса равны 1.
![]() .
.
Минимальное
значение огибающей соответствует тем
моментам, когда косинус модулирующего
колебания равен
![]() :
:
![]() .
.
Отсюда вытекает формула, позволяющая вычислить коэффициент модуляции по результатам измерений максимальной и минимальной амплитуд сигнала:
![]() .
.
Обычно коэффициент
модуляции должен лежать в пределах
![]() .
При
.
При
![]() имеет место перемодуляция. При
перемодуляции амплитудная огибающая
сигнала искажается.
имеет место перемодуляция. При
перемодуляции амплитудная огибающая
сигнала искажается.
Рассмотрим спектральный состав АМ-сигнала:

Мы видим, что
однотональный АМ-сигнал состоит из трёх
гармонических составляющих. Одна из
них – это несущее колебание с частотой
,
две остальные (их называют боковыми
частотами) отстоят от него вверх и вниз
по частоте на величину Ω. Амплитуда
несущего колебания равна
и не зависит от уровня модулирующего
сигнала. Амплитуды боковых частот,
равные
![]() ,
напротив пропорциональны коэффициенту
модуляции.
,
напротив пропорциональны коэффициенту
модуляции.
Для верхней боковой частоты начальные фазы несущей и модулирующего колебания складываются, для нижней вычитаются. Амплитудный и фазовый спектр однотонального АМ-сигнала имеют такой вид.

Видно, что ширина
спектра однотонального АМ-сигнала в
два раза превышает частоту модулирующего
сигнала:
![]() .
.
Чтобы понять, как из трёх гармонических составляющих с постоянной амплитудой складывается сигнал с меняющейся амплитудой, построим векторную диаграмму. Для этого представим каждое из трёх гармонических колебаний как вещественную часть комплексной экспоненты:
 .
.

При сложении колебаний с разными частотами постоянно меняются их взаимные фазовые соотношения. Векторы боковых частот вращаются в разные стороны с угловой скоростью Ω относительно вектора несущего колебания. В результате колебания боковых частот оказываются, то синфазные с несущим (амплитуда его увеличивается), то противофазными с ним (амплитуда его уменьшается). Наконец, вектор несущей частоты вращается с угловой скоростью ω. Значение АМ-сигнала есть проекция результирующего вектора на действительную ось.
АМ-сигнал в общем случае.
Спектр АМ-сигнала:
![]() .
.
Спектр огибающей
при амплитудной модуляции сдвигается
в область несущей частоты
![]() ,
“раздваиваясь” и уменьшаясь в 2 раза
по уровню.
,
“раздваиваясь” и уменьшаясь в 2 раза
по уровню.
В общем случае спектр АМ-сигнала содержит несущую частоту и верхнюю и нижнюю боковые полосы.
Ширина спектра
АМ-сигнала вдвое больше максимальной
частоты модулирующего сигнала
![]() .
.
Энергетические соотношения в АМ-сигнале.
Вначале определим
типовую мощность однотонального
АМ-сигнала. Его максимальная амплитуда
составляет
![]() ,
следовательно пиковая мощность
составляет:
,
следовательно пиковая мощность
составляет:
![]() .
.
Теперь займёмся средней мощностью. В общем случае АМ-сигнал не является периодическим поэтому для расчёта средней мощности необходимо применить предельный переход по
 .
.
 .
.
Первое слагаемое не зависит от коэффициента модуляции и представляет собой мощность немодулированной несущей. Полезная мощность, заключённая в боковых частотах – это второе слагаемое.
Введём в рассмотрение коэффициент полезного действия (КПД) АМ. Определим его как отношение мощности боковых частот к общей средней мощности сигнала:
 .
.
В зависимости от коэффициента модуляции график КПД выглядит так:

Результаты
неутешительны – даже при максимально
допустимом коэффициенте модуляции (![]() )
КПД составляет лишь
)
КПД составляет лишь
![]() .
Это значит, что две трети передаваемой
мощности тратится на передачу бесполезной
в информационном отношении несущей.
.
Это значит, что две трети передаваемой
мощности тратится на передачу бесполезной
в информационном отношении несущей.
Исторически АМ была первым видом модуляции. Однако низкий КПД и ширина спектра, вдвое превышающая ширину спектра исходного сигнала, привели к тому, что сегодня сфера применения АМ стала достаточно узкой. Она ограничена радиовещанием на низких частотах (диапазоны длинных, средних и коротких волн) и для передачи изображения в телевизионном вещании.
Демодуляция АМ.
Демодуляция АМ может быть выполнена несколькими способами.
Простейший путь – имитировать работу аналогового двухполупериодного детектора: вычислить модуль входного АМ-сигнала, а за тем сгладить получившиеся однополярные косинусоидальные импульсы, пропустив их через ФНЧ.
Такой способ, очевидно, не будет работать при перемодуляции.
Другой метод, так называемое, синхронное детектирование. Суть его состоит в умножении АМ-сигнала на опорное колебание с несущей частотой.
![]() .
.
Первое слагаемое
– искомая амплитудная функция, второе
– АМ-сигнал с несущей частотой
![]() .
Это слагаемое легко удаляется путём
пропускания сигнала через ФНЧ.
.
Это слагаемое легко удаляется путём
пропускания сигнала через ФНЧ.
Однако в этом случае требуется очень точное совпадение начальных фаз и частот опорного колебания и несущей АМ-сигнала. При совпадении частот, но несовпадении начальных фаз выходной НЧ сигнала оказывается умноженных на косинус фазовой ошибки:
![]() .
.
При наличии фазовой
ошибки уровень полезного сигнала на
выходе демодулятора падает, а при ошибке,
равной
![]() ,
становится равным нулю.
,
становится равным нулю.
При наличии частотного сдвига между несущим и опорным колебаниями:
![]() .
.
выходной сигнал
пульсирует с частотой
![]() .
Это явление называется биениями (beat),
а разность частот
– частотой биений (beat
frequency).
.
Это явление называется биениями (beat),
а разность частот
– частотой биений (beat
frequency).
Существуют специальные методы поддержания частотной и фазовой синхронизации (ФАПЧ).
Достоинство синхронного детектирования – возможность детектирования даже при перемодуляции.
Разновидности амплитудной модуляции АМ с подавленной несущей.
Первое, что приходит в голову при размышлении о повышении КПД АМ – это идея удалить бесполезное несущее колебание, всё-таки отказавшись от добавления постоянной составляющей и модулирующему сигналу. Такой способ называется АМ с подавленной несущей (АМ-ПН, англ. amplitude modulation with suppressed carrier, AM-SC).
![]() .
.
Энергетический
выигрыш при этом, конечно, велик (КПД
становится равным
![]() ).
).
Ширина спектра АМ-сигнала с подавленной несущей такая же, как в случае обычной АМ (несущая подавлена, но боковые частоты остались на месте). Таким образом, применение АМ с подавленной несущей имеет энергетические преимущества. Однако возникают проблемы при демодуляции.
Демодуляция АМ с подавленной несущей осуществляется также методам синхронного детектирования, со всеми его недостатками и преимуществами.
Иногда применяют следующий приём. На передающей стороне несущее колебание подавляется не полностью. Его “остаток” с малой амплитудой называется пилот-сигнал и используется на приёмной стороне для синхронизации частоты и фазы на приёмной стороне.
Однополосная модуляция.
АМ-ПН имеет только энергетические преимущества, но ширина полосы остаётся той же, что и в АМ-сигнале.
Можно заметить, что спектры двух боковых полос АМ-сигнала являются зеркальным отражением друг друга, т.е. несут одну и ту же информацию. Поэтому одну из боковых полос можно удалить. Получившаяся модуляция называется однополосной (англ. single side band, SSB).
В зависимости от того, какая боковая полоса сохраняется, говорят об однополосной модуляции с верхней или нижней боковой полосой.

По сути дела при
однополосной модуляции происходит
просто сдвиг спектра сигнала в окрестности
частоты несущего колебания. В отличие
от АМ каждая половинка смещается в своём
направлении: область положительных
частот – к
,
а область отрицательных частот – к
![]() .
.
Очевидно, что ширина спектра SSB равна ширине спектра модулирующего сигнала. Т.о. передаваемый спектр в два раза уже, чем при АМ.
В случае SSB аналитические соотношения сложнее, чем просто при АМ, они основаны на преобразовании Гильберта и аналитическом сигнале. (Проработать самостоятельно).
Демодуляция SSB вызывает серьёзные фазовые искажения и сдвиг спектра на . Такие искажения совершенно неприемлемы при высококачественном вещании, но вполне пригодны для профессиональной радиосвязи, где в основном, и применяется SSB.
Полярная модуляция.
Полярная модуляция не сеть отдельный вид модуляции. Это демонстрация применения АМ для решения конкретной задачи коммуникаций. А именно стереофонического вещания в УКВ-диапазоне.
Для осуществления
стереовещания необходимо передавать
два сигнала
![]() и
и
![]() (левого и правого каналов) одновременно.
В то же время для таких систем накладывается
ещё одно требование: совместимость с
имеющимися монофоническими приёмниками.
Поэтому для стереовещания модифицируется
низкочастотный модулирующий сигнал,
который поступает на вход модулятора
передатчика (в передатчике используется
угловая модуляция, в частности, частотная:
FM).
(левого и правого каналов) одновременно.
В то же время для таких систем накладывается
ещё одно требование: совместимость с
имеющимися монофоническими приёмниками.
Поэтому для стереовещания модифицируется
низкочастотный модулирующий сигнал,
который поступает на вход модулятора
передатчика (в передатчике используется
угловая модуляция, в частности, частотная:
FM).
Низкочастотная составляющая для совместимости с монофоническими приёмниками должна представлять собой монофонический сигнал, т.е. сумму правого и левого каналов:
![]() .
.
В области более
высоких (ультразвуковых) частот с помощью
АМ передаётся дополнительный сигнал,
позволяющий впоследствии выделить из
смеси
![]() сигналы
и
по отдельности. Этим дополнительным
сигналом является разностный сигнал:
сигналы
и
по отдельности. Этим дополнительным
сигналом является разностный сигнал:
![]() .
.
Пусть сигналы левого и правого каналов – гармонические сигналы разных частот:
![]() ,
,
![]() .
.
Складывая и вычитая
сигналы
![]() и
и
![]() ,можно
получить:
,можно
получить:
![]() ,
,
![]() .
.
Монофонический сигнал, как уже сказано, передаётся как есть, а разностный сигнал модулирует несущую частоту, расположенную несколько выше звукового диапазона частот (её называют поднесущей, (sub carrier), поскольку весь сигнал, о формировании которого идёт речь, затем используется для угловой модуляции несущей в УКВ диапазоне в радиопередатчике).
![]() .
.
Получающийся сигнал называется помиозитным и обладает интересным свойством: его верхняя и нижняя огибающие не совпадают. Верхняя огибающая соответствует сигналу левого канала, нижняя – сигналу правого канала. Несущую частично или полностью подавляют, так что композитный сигнал передаётся в режиме перемодуляции.
Сейчас используется
международный стандарт в диапазоне
![]() .
Он специфицирует полное подавление
поднесущей, частота которой равна
.
Он специфицирует полное подавление
поднесущей, частота которой равна
![]() .
Для обеспечения возможности правильного
восстановления поднесущего сигнала в
стереодекодере приёмника в состав
сигнала вводится пилот-сигнал на
половинной частоте поднесущей (
.
Для обеспечения возможности правильного
восстановления поднесущего сигнала в
стереодекодере приёмника в состав
сигнала вводится пилот-сигнал на
половинной частоте поднесущей (![]() ).
Ранее (и сейчас в России) был стандарт,
согласно которому вещание ведётся в
диапазоне
).
Ранее (и сейчас в России) был стандарт,
согласно которому вещание ведётся в
диапазоне
![]() с частичным подавлением поднесущей,
равной
с частичным подавлением поднесущей,
равной
![]() .
.
Лекция №17.
Угловая модуляция.
Мы уже говорили, что фазовая модуляция (ФМ) и частотная модуляция (ЧМ) тесно связаны друг с другом, благодаря чему они получили общее название – угловая модуляция (УМ; англ. – angle modulation).
Фазовая и частотная модуляция.
Название этих двух видов модуляции, как и в случае АМ, указывают на тот параметр несущей, который линейно связан с модулирующим сигналом.
Фазовая модуляция.
Пусть модулирующий сигнал определяет начальную фазу несущего колебания:
![]() .
.
Тогда мы получаем сигнал с фазовой модуляцией (ФМ; англ. – phase modulation, PM):
![]() .
.
Весь аргумент функции косинус, взятый целиком, называется полной фазой колебания:
![]() .
.
По определению круговая частота есть скорость изменения начальной фазы. Подобно тому, как при неравномерном движении вводят понятие мгновенной скорости (производная от координаты по времени), для колебаний с УМ вводится понятие мгновенной частоты (instantaneous frequency), равной производной полной фазы по времени:
![]() .
.
Мы видим, что в случае фазовой модуляции изменяется не только начальная фаза, но и мгновенная частота колебания.
Соответственно, полная фаза находится путём интегрирования мгновенной частоты:
![]() .
.
Частотная модуляция.
Теперь введём понятие частотной модуляции (ЧМ, англ. – frequency modulation, FM). При ЧМ модулирующий сигнал линейно связан с мгновенной частотой колебания:
![]() .
.
Слагаемое нужно для того, чтобы сделать колебания высокочастотным.
Полная фаза находится путём интегрирования:
![]() ,
,
где
![]() – производная постоянная интегрирования.
– производная постоянная интегрирования.
Сам ЧМ-сигнал имеет вид:
![]() .
.
Как видно, начальная фаза колебания при ЧМ изменяется пропорционально интегралу от модулирующего колебания:
![]() .
.
Т.о. ЧМ и ФМ оказываются взаимосвязанными: если изменяется начальная фаза колебания, изменяется и его мгновенная частота и наоборот.
Гармоническая угловая модуляция.
Рассмотрим случай гармонического модулирующего сигнала. Начальная фаза колебания изменяется при этом по гармоническому закону:
![]() .
.
Коэффициент β называется индексом угловой модуляции (modulation index). Он определяет интенсивность колебаний начальной фазы.
Полная фаза
получится путём добавления линейного
слагаемого
![]() :
:
![]() .
.
Наконец, сам сигнал с гармонической УМ:
![]() .
.
Как мы уже говорили, при изменении начальной фазы изменяется и мгновенная частота:
![]() .
.
Мгновенная частота
в данном случае также изменяется по
гармоническому закону. Её максимальное
отклонение от среднего значения
составляет
![]() .
Эта величина называется девиацией
частоты (frequency
deviation)
и обозначается
.
Эта величина называется девиацией
частоты (frequency
deviation)
и обозначается
![]() .
Таким образом, мы получили важное
соотношение, показывающее, что индекс
УМ равен отношению девиации частоты к
частоте модулирующего сигнала:
.
Таким образом, мы получили важное
соотношение, показывающее, что индекс
УМ равен отношению девиации частоты к
частоте модулирующего сигнала:
![]() .
.
Итак, при гармонической УМ и начальная фаза, и мгновенная частота меняются по гармоническому закону. Различия между ЧМ и ФМ начинают проявляться при изменении частоты модулирующего сигнала Ω.
При ФМ индекс β является характеристическим параметром модуляции и от частоты модулирующего сигнала не зависит. Девиация частоты прямо пропорциональна Ω:
![]() ,
,
![]() .
.
При ЧМ характеристическим
параметром, не зависящим от частоты
модулирующего сигнала, является девиация
частоты
![]() .
Индекс модуляции в этом случае оказывается
обратно пропорциональным Ω:
.
Индекс модуляции в этом случае оказывается
обратно пропорциональным Ω:
![]() ,
,
.

Именно по этой причине эти два вида модуляции объединяют под общим названием “угловая модуляция”. Из изложенного можно сделать такие выводы:
1. По форме колебания с УМ нельзя определить, ФМ это или ЧМ. Для этого необходимо знать ещё и модулирующий сигнал.
2. Если пропустить модулирующий сигнал через идеальный дифференциатор, а затем подать на частотный модулятор, получится фазовая модуляция.
3. Если пропустить модулирующий сигнал через идеальный интегратор, а затем подать его на фазовый модулятор, получится частотная модуляция.
!!!!!!!!!!!!!!!!!!!!!!!!
Параметр |
ФМ |
ЧМ |
Начальная фаза |
|
|
Полная фаза |
|
|
Мгновенная частота |
|
|
Спектр сигнала с гармонической угловой модуляцией.
Для расчёта спектрального представления сигнала с гармонической УМ представим сигнал в виде вещественной части комплексной экспоненты:

Воспользуемся
представлением выражения
![]() в виде ряда Фурье:
в виде ряда Фурье:
![]() ,
,
здесь
![]() – функция Бесселя 1-го порядка k
от аргумента β.
– функция Бесселя 1-го порядка k
от аргумента β.
С использованием этого ряда можно записать:
спектр сигнала с
УМ содержит бесконечное количество
составляющих с частотами
![]() Амплитуда k-ой
составляющей равна
Амплитуда k-ой
составляющей равна
![]() ,
то есть пропорциональна функции Бесселя
k-ого порядка, аргументом которой является
индекс модуляции β.
,
то есть пропорциональна функции Бесселя
k-ого порядка, аргументом которой является
индекс модуляции β.
Функции Бесселя имеют колебательный характер, поэтому спектр при удалении от центральной частоты спадает немонотонно.

Теперь приближенно
рассмотрим случай малого индекса
модуляции:
![]() .
.
![]() .
.
Поскольку мы считаем, что , можно принять, что
![]() ,
,
![]() .
.
С учётом этого
![]() .
.
Остаётся представить последнее слагаемое в виде полуразности косинусов:
![]() .
.
Что напоминает полученный результат? Представление АМ-сигнала с гармонической модуляцией – тоже три составляющих с теми же частотами, и амплитуды их рассчитываются аналогично (только вместо коэффициента амплитудной модуляции m в формуле фигурирует индекс угловой модуляции β).
Однако есть не
слишком бросающееся в глаза, и тем не
менее принципиальное отличие, превращающее
АМ в УМ – знак минус перед одним из
слагаемых, соответствующих боковым
частотам. Чем этот знак важен, мы увидим
позже, а пока отметим главное: чтобы
превратить сигнал с гармонической АМ
в сигнал с гармонической УМ, достаточно
изменить на
![]() начальную
фазу
одной из
боковых частот.
начальную
фазу
одной из
боковых частот.
УМ с малым индексом модуляции β называют узкополосной УМ. Её амплитудный и фазовый спектры выглядят так.

Векторная диаграмма сигнала с гармонической УМ выглядит так.

Ширина спектра сигнала с гармонической УМ.
При малом индексе
модуляции ширину спектра можно принять
равна
![]() (как в случае АМ-сигнала). Сложнее оценить
ширину спектра в случае большого индекса
модуляции β. В случае УМ речь идёт именно
об эффективной ширине спектра, поскольку
спектр содержит бесконечное число
слагаемых.
(как в случае АМ-сигнала). Сложнее оценить
ширину спектра в случае большого индекса
модуляции β. В случае УМ речь идёт именно
об эффективной ширине спектра, поскольку
спектр содержит бесконечное число
слагаемых.
При фиксированном
аргументе β функции Бесселя затухают
с ростом их порядка k.
Обычно считают, что при оценке эффективной
ширины спектра в случае
![]() можно пренебречь составляющими с
номерами, по абсолютной величине
превосходящими индекс модуляции β.
Таким образом, остаются составляющие,
для которых
можно пренебречь составляющими с
номерами, по абсолютной величине
превосходящими индекс модуляции β.
Таким образом, остаются составляющие,
для которых
![]() и эффективная ширина спектра оказывается
равной:
и эффективная ширина спектра оказывается
равной:
![]()
или, с учётом того, что ,
![]() .
.
Итак:
- при
ширина спектра равна удвоенной частоте
модулирующего сигнала:
![]() ;
;
- при ширина спектра УМ равна удвоенной девиации частоты .
(Демодуляция УМ – рассмотреть самостоятельно).
Квадратурная модуляция.
Рассматривая АМ и УМ, мы анализировали случаи, когда амплитуда и начальная фаза несущего гармонического колебания менялись по отдельности. Однако можно менять эти два параметра одновременно, получая за это возможность передавать два сигнала сразу:
![]() .
.
Такую модуляцию можно было бы назвать амплитудно-фазовый. Однако в данном случае два модулирующих сигнала оказываются “неравноправными”, т.к. модулируют два различных параметра несущей. Можно сделать ситуацию более “симметричной”, преобразовав форму представления сигнала:
![]() .
.
Теперь сигнал
оказался представленным в виде суммы
двух АМ-колебаний. Их несущие
![]() и
и
![]() сдвинуты по фазе на
друг
относительно друга, а амплитудные
функции равны
сдвинуты по фазе на
друг
относительно друга, а амплитудные
функции равны
![]() и
и
![]() .
Обозначим эти амплитудные функции как
.
Обозначим эти амплитудные функции как
![]() и
и
![]() .
Используем их в качестве новых модулирующих
сигналов (вместо амплитуды и начальной
фазы):
.
Используем их в качестве новых модулирующих
сигналов (вместо амплитуды и начальной
фазы):
![]() .
.
Такое представление сигнала называется квадратурным, а данный способ модуляции – квадратурной модуляцией (КАМ, англ. quadrature amplitude modulation, QAM).
Спектр сигнала с КАМ.
Поскольку КАМ-сигнал представляет собой сумму двух АМ-сигналов, мы можем сразу записать:
![]() .
.
Аналогично тому,
что происходит при АМ, спектры модулирующих
сигналов “раздваиваются” и “переезжают”
в окрестности частоты несущей
![]() .
Если спектры модулирующих сигналов
и
занимают одну и ту же полосу частот (как
это обычно и бывает), то они будут
перекрываться и после сдвига в область
несущей частоты. Однако при этом спектр,
соответствующий синусной несущей,
дополнительно умножается на
.
Если спектры модулирующих сигналов
и
занимают одну и ту же полосу частот (как
это обычно и бывает), то они будут
перекрываться и после сдвига в область
несущей частоты. Однако при этом спектр,
соответствующий синусной несущей,
дополнительно умножается на
![]() .
Именно это даёт возможность разделить
квадратурные составляющие при приёме
сигнала.
.
Именно это даёт возможность разделить
квадратурные составляющие при приёме
сигнала.
Лекция №18.
Способы модуляции, используемые при передаче цифровой информации.
В настоящее время
всё большая часть информации, передаваемой
по каналам коммуникаций, существует в
цифровом виде. Это означает, что передаче
подлежит не непрерывный аналоговый
модулирующий сигнал, а последовательность
целых чисел
![]() ,
,
![]() ,
,
![]() ,
которые могут принимать значения из
некоторого фиксированного конечного
множества. Эти числа, называемые символами
(symbol),
поступают от источника информации с
периодом Т, а частота, соответствующая
этому периоду, называется символьной
скоростью (symbol
rate):
,
которые могут принимать значения из
некоторого фиксированного конечного
множества. Эти числа, называемые символами
(symbol),
поступают от источника информации с
периодом Т, а частота, соответствующая
этому периоду, называется символьной
скоростью (symbol
rate):
![]() .
Наиболее используемым на практике
случаем является двоичная последовательность
символов, когда каждое из чисел может
принимать одно из двух значений: 0 или
1.
.
Наиболее используемым на практике
случаем является двоичная последовательность
символов, когда каждое из чисел может
принимать одно из двух значений: 0 или
1.
Последовательность передаваемых символов является, очевидно, дискретным сигналом. Поскольку символы принимают значения из конечного множества, этот сигнал фактически является и квантованным, т.е. цифровым. Следовательно, стоит задача преобразования цифрового сигнала в аналоговый модулированный сигнал.
Типичный подход
при осуществлении дискретной
последовательности символов состоит
в следующем. Каждому из возможных
значений символа сопоставляется
некоторый набор параметров несущего
колебания. Эти параметры поддерживаются
постоянными в течении интервала Т, т.е.
до прихода следующего символа. Фактически
это означает преобразование
последовательности чисел
![]() в ступенчатой сигнал
в ступенчатой сигнал
![]() с использованием кусочно-линейный
интерполяции:
с использованием кусочно-линейный
интерполяции:
![]() ,
,
![]() .
.
Здесь f – некоторая функция преобразования. Полученный сигнал далее используется в качестве модулирующего сигнала обычным способом.
Такой способ модуляции, когда параметры несущего колебания меняются скачкообразно, называется манипуляцией (keying). В зависимости от того, какие именно параметры изменяются, различают амплитудную (АМн), фазовую (ФМн), частотную (ЧМн) и квадратурную (КАМн) модуляцию. Кроме того, при передаче цифровой информации может использоваться отличное от гармонического несущее колебание. Так при использовании в качестве несущего колебания последовательности прямоугольных импульсов возможны амплитудно-импульсная модуляция (АИМ), широтно-импульсная модуляция (ШИМ) и время-импульсная модуляция (ВИМ).
Частотная модуляция.
При частотной манипуляции (ЧМн, англ. – frequency shift keying, FSK) каждому возможному значению передаваемого символа сопоставляется своя частота. В течение каждого символьного интервала передаётся гармоническое колебание, соответствует текущему сигналу.

Поскольку мы формировали каждую посылку независимо, сигнал содержит скачки. А значит, спектр его будет достаточно широким. Поэтому можно попытаться сделать спектр ЧМн-сигнал компактнее, изменив способ формирования так, чтобы устранить скачки.
Такой способ формирования сигнала называется частотной манипуляцией с непрерывной фазовой функцией (continuous phase frequency shift keying, CPFSK). При этом формируется линейно меняющаяся полная фаза колебания, а передаваемые символы управляют скоростью её изменения. Или можно сказать так: передаваемые символы переключают значения мгновенной частоты; эта частота интегрируется, давая непрерывную фазовую функцию; косинус такой полной фазы тоже будет непрерывный функцией.

Приём ЧМн-сигнала осуществляется корреляционным методом. Сущность его состоит в вычислении взаимной корреляции между принимаемым сигналом и колебаниями-образцами (опорными сигналами), представляющими собой гармонические колебания с используемыми для манипуляции частотами. В качестве выходного символа выбирается тот, частота которого оказывается максимально коррелированной с входным сигналом.
Корреляционный приём может быть когерентным и некогерентным. Когерентный алгоритм может использоваться, если известна начальная фаза колебания. Опорными сигналами в этом случае служат вещественные синусоиды с нужными частотами и начальными фазами. Для принятия решения о принятом символе сравниваются результаты вычисления корреляционных сумм.
На практике, однако, начальная фаза, как правило, неизвестна. В таких случаях применяют некогерентный корреляционный приём, при котором опорные сигналы представляют собой комплексные экспоненты с нужными частотами. Для принятия решения о принятом символе сравниваются модули комплексных результатов вычисления корреляционных сумм. Модуль комплексной ВКФ не зависит от начальных фаз сигналов, однако помехоустойчивость такого алгоритма несколько хуже, чем в случае когерентного приёма.
Минимальная частотная манипуляция.
Для повышения помехоустойчивости ЧМн желательно, чтобы посылки, соответствующие разным символам, были некоррелированны.
Считая начальные фазы посылок нулевыми, ЧМн-сигналы для символов 0 и 1 можно записать так:
![]() ,
,
![]() ,
,
![]() ,
.
,
.
Их ВКФ при нулевом временном сдвиге равна:
 Если
Если
![]() ,
то первое слагаемое значительно меньше
второго и им можно пренебречь:
,
то первое слагаемое значительно меньше
второго и им можно пренебречь:
 .
.
Это значение равно
нулю при
![]() ,
где k
– целое число, не равное нулю. Таким
образом, минимальное значение расстояние
между частотами манипуляции, при котором
посылки, соответствующие разным символам,
оказываются некоррелированными,
составляет:
,
где k
– целое число, не равное нулю. Таким
образом, минимальное значение расстояние
между частотами манипуляции, при котором
посылки, соответствующие разным символам,
оказываются некоррелированными,
составляет:
![]() ,
,
![]() ,
(*)
,
(*)
где
![]() - символьная скорость.
- символьная скорость.
Двухпозиционная (бинарная) ЧМн, частоты которой выбраны согласно (*), получила название минимальной частотной манипуляции (МЧМн, англ. – minimum shift keying, MSK).
Амплитудная манипуляция.
Далее мы покажем, что амплитудная манипуляция (АМн, англ. – amplitude shift keying, ASK), при которой скачкообразно меняется амплитуда несущего колебания, является частным случаем квадратурной манипуляции. АМн-сигнал выглядит так:

Фазовая манипуляция.
Фазовая манипуляция (ФМн, англ. – phase shift keying, PSK), при которой скачкообразно меняется фаза несущего колебания, тоже является частным случаем квадратурной манипуляции.
На практике фазовая манипуляция используется при небольшом числе возможных значений фазы – как правило, 2, 4 или 8. Кроме того, при приёме сигнала сложно измерить абсолютное значение начальной фазы; значительно проще определить относительный фазовый сдвиг между двумя соседними символами. Поэтому обычно используется фазоразностная манипуляция (синонимы – дифференциальная фазовая манипуляция, относительная фазовая манипуляция, англ. - differential phase shift keying, DPSK).
Квадратурная манипуляция.
При квадратурной
манипуляции (КАМн, англ. – quadrature
amplitude
shift
keying,
QASK)
каждому из возможных значений дискретного
символа
![]() ставится в соответствие пара величин
– амплитуда синфазной и квадратурной
составляющих, либо, что эквивалентно,
амплитуда и начальная фаза несущего
колебания:
ставится в соответствие пара величин
– амплитуда синфазной и квадратурной
составляющих, либо, что эквивалентно,
амплитуда и начальная фаза несущего
колебания:
![]() ,
,
или
![]() .
.
Параметры аналогового
колебания, сопоставленные дискретному
символу
удобно представлять в виде комплексного
числа в алгебраической
![]() или экспоненциальной
или экспоненциальной
![]() форме. Совокупность этих комплексных
чисел для всех возможных значений
дискретного символа называется
сигнально-кодовая конструкция (СКК) или
сигнальное созвездие (constellation).
Мы выберем более выразительное и
запоминающееся слово “созвездие”.
форме. Совокупность этих комплексных
чисел для всех возможных значений
дискретного символа называется
сигнально-кодовая конструкция (СКК) или
сигнальное созвездие (constellation).
Мы выберем более выразительное и
запоминающееся слово “созвездие”.
При представлении дискретного символа комплексным числом сигнал с квадратурной манипуляцией можно записать таким образом:
![]() .
.
На практике используется созвездия, содержащие от четырёх точек до нескольких тысяч.

Созвездия из 16
точек, соответствующих протоколу v32,
скорость
![]() (используется в модемах для передачи
данных по телефонным линиям).
(используется в модемах для передачи
данных по телефонным линиям).
При квадратурной манипуляции могут меняться и амплитуда, и начальная фаза несущего колебания. Поэтому амплитуда и фазовая манипуляция является частными случаями квадратурной – нужно лишь использовать соответствующие созвездия.
Созвездия, соответствующие 8-позиционной амплитудной (слева) и фазовой (справа) манипуляции выглядит так:
ASK constellation PSK constellation

Помехоустойчивость.
За счёт использования двумерного характера несущего колебания (под двумерностью здесь понимается наличие двух параметров, которые можно изменять независимо) квадратурная манипуляция обеспечивает большую помехоустойчивость (т.е. меньшую вероятность ошибки), чем АМн и ФМн. Не вдаваясь в детали, скажем, что помехоустойчивость тем выше, чем больше расстояние d между ближайшими точками созвездия на комплексной плоскости. При этом для сравнения разных созвездий у них должны быть одинаковыми, помимо числа точек, среднеквадратичные амплитуды:
 .
.
Сравним для примера помехоустойчивость 16-позиционных амплитудной, фазовой и квадратурной модуляции.

Сравнение приведено в таблице.
Вид манипуляции |
Минимальное межточечное расстояние,
|
Среднеквадратический уровень сигнала, σ |
Нормированное расстояние,
|
АМн |
|
|
|
ФМН |
|
1 |
|
КАМн |
|
|
|
Анализ данных в таблице показывает, что квадратурная манипуляция обеспечивает максимальное межточечное расстояние, нормированное к среднеквадратическому уровню сигнала.
Демодуляция.
Демодулируется сигнал с КАМн так же, как и в случае аналоговой квадратурной манипуляции – сигнал умножается на два несущих колебания, сдвинутых по фазе друг относительно друга на , а результаты умножения пропускаются через ФНЧ. На выходе этих ФНЧ будут получены аналоговые сигналы синфазной и квадратурной составляющих. Далее эти сигналы дискретизируются с частотой, равной символьной скорости. Пары отсчётов синфазной и квадратурной составляющих образуют комплексное число, и ближайшая к этому числу точка используемого созвездия (а точнее – соответствующий этой точке информационный символ) выдаётся в качестве выходного результата. В результате получается диаграмма рассеивания (график принятых точек на комплексной плоскости).

Формирование спектра.
Если параметры
модуляции аналогового сигнала
поддерживается постоянными в течение
символьного такта и в начале нового
такта изменяются скачкообразно, это
приводит к формированию скачков в
сформированном сигнале. Спектр сигнала,
содержащего скачки затухает с ростом
частоты медленно – как
![]() .
Чтобы обеспечить компактность спектра,
нужно обеспечить гладкость сигнала, а
это, в свою очередь, означает гладкость
модулирующей функции. Значит, вместо
скачкоообразного изменения параметров
модуляции нам необходимо выполнить
интерполяцию
между точками созвездия, соответствующими
последовательным символам.
.
Чтобы обеспечить компактность спектра,
нужно обеспечить гладкость сигнала, а
это, в свою очередь, означает гладкость
модулирующей функции. Значит, вместо
скачкоообразного изменения параметров
модуляции нам необходимо выполнить
интерполяцию
между точками созвездия, соответствующими
последовательным символам.
Согласно теореме
Котельникова, мы можем соединить отсчёты,
следующие с символьной скоростью
![]() ,
плавной функцией, занимающей полосу
частот от нуля до
,
плавной функцией, занимающей полосу
частот от нуля до
![]() .
В этом случае КАМн сигнал будет занимать
полосу частот шириной
.
Однако медленное затухание функций
sinc, составляющих базис Котельникова,
делает неудобной интерполяцию на их
основе. Наибольшее распространение при
интерполяции отсчётов для цифровой
модуляции получил SQRT-вариант фильтра
с косинусным сглаживанием АЧХ.
.
В этом случае КАМн сигнал будет занимать
полосу частот шириной
.
Однако медленное затухание функций
sinc, составляющих базис Котельникова,
делает неудобной интерполяцию на их
основе. Наибольшее распространение при
интерполяции отсчётов для цифровой
модуляции получил SQRT-вариант фильтра
с косинусным сглаживанием АЧХ.
Фильтр, используемый для интерполяции, определяет форму спектра КАМн-сигнала, поэтому его называют формирующим фильтром (shaping filter), а сам процесс – формированием спектра (spectral shaping). спектр становится значительно компактнее.
При приёме такого сигнала в качестве ФНЧ необходимо использовать такой же фильтр, как для формирования спектра. Последовательное использование SQRT-фильтров с косинусоидальным сглаживанием даёт результирующую ИХ, равную нулю в точках, сдвинутых на целое число символов относительно пика. Это позволяет при правильном выборе моментов взятия отсчётов устранить помехи от соседних символов (так называемую межсимвольную интерференцию, МСИ, англ. – intersymbol interference, ISI). При использовании такой фильтрации разброс точек на диаграмме рассеивания становится значительно меньше.
Дополнение.
Если модулирующий сигнал содержит всего 2 символа, то КАМн называется бинарной, если m символов – m-арной (англ. m-ary).
Скорость передачи
информации измеряется в
![]() .
Если передаётся бинарный сигнал, то
.
Если передаётся бинарный сигнал, то
![]() (1 символ в секунду). Если символ состоит
из 2х
бит, то скорость передачи в два раза
меньше.
(1 символ в секунду). Если символ состоит
из 2х
бит, то скорость передачи в два раза
меньше.
Если скорость передачи данных Д ( ), частота передачи символов R, то скорость:
![]() ,
,
где n – количество битов, используемых для кодирования одного символа
Число точек созвездия (число возможных символов):
![]() .
.
![]() .
.
Т.е.
![]() .
.
Если применяется
16-позиционная манипуляция и скорость
передачи символов равна
![]() ,
то
,
то
![]() .
.
Лекция №19.
Физические каналы передачи информации.
Физические каналы передачи информации бывают двух видов: закрытые и открытые (или среды).
В закрытом канале распространения сигналов ограничено данным каналом и, за исключением небольших утечек, сигнал не покидает среду передачи.
В открытых средах сигнал распространяет свободно в разные стороны (с учётом того, как он был излучён передатчиком). К открытым средам относятся атмосфера, океан, космическое пространство.
Закрытые среды передачи.
1. Пара проводов.
Самым простым
примером закрытой среды является пара
проводов, обеспечивающая двухстороннее
распространение электрических сигналов.
В первых системах передачи информации
(телеграф, Сэмюель Финли Бриз Морзе,
1832, первые испытания в 1844 г., когда из
Вашингтона в Балтимор было передано по
проводу сообщение “What
hatll
God
wrought!”
– “Чудны дела твои, Господи”. В России
изобретателем телеграфа считался Павел
Львович Шиллинг (1832 г.). Отличительной
особенностью телеграфа Морзе была
двоичная передача информации, в то
время, как в телеграфе Шиллинга сигнал
передавался на 3-х уровнях
,
0 и
![]() .
В 1866 г. между США и Францией был проложен
телеграфный трансатлантический кабель)
обычно в качестве второго провода
использовалась земля. Схема далека от
оптимальной, т.к. земля не является
идеальным проводником. кроме того, такой
канал связи чувствителен и атмосферному
электричеству. Позже стали применять
двухпроводные медные электрические
линии.
.
В 1866 г. между США и Францией был проложен
телеграфный трансатлантический кабель)
обычно в качестве второго провода
использовалась земля. Схема далека от
оптимальной, т.к. земля не является
идеальным проводником. кроме того, такой
канал связи чувствителен и атмосферному
электричеству. Позже стали применять
двухпроводные медные электрические
линии.
Некоторое количество проводников, конструктивно соединённых вместе и изолированных друг от друга называется кабелем связи. Кабели бывают подземные, подводные и подвесные. Старейшие кабели сегодня – это городские телефонные кабели, появившиеся с изобретением телефона (Александр Грехэм Бекл, 1876 г., первая телефонная станция была создана в 1878 г. в г. Нью-Хейвен, США).
Особым видом
закрытого канала передачи является
витая пара (twisted
pair),
которая широко применяется и в проводной
телефонии и в локальных вычислительных
сетях. Начало применения витой пары
датируется ХIX
веком. Витая пара бывает экранированная
и неэкранированная. Сейчас шире
применяется неэкранированная витая
пара. Главным её недостатком является
ограниченная полоса передаваемых
частот: граничная частота примерно
равна
![]() .
.
2. Коаксиальный кабель.
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
Коаксиальный кабель устроен так. Название его означает соосный (axis – ось), т.к. оба проводника имеют общую ось.
Когда в проводнике течёт переменный ток, с ростом частоты носители тока всё сильнее вытесняются к поверхности его. Этот эффект называется скин-эффектом. На частотах порядка сотен мегагерц ток полностью вытесняется из проводника и проводник, излучая электромагнитную энергию в пространство, превращается в антенну.
В коаксиальном кабеле, который изобрёл в 1912 г. П.Д. Войнаровский, а стал применять в каналах связи в 1934 г. американский изобретатель С.А. Щелкунов энергия сигнала локализована внутри кабеля. Он не излучает ЭМ энергию в пространство и не влияет на соседние каналы связи.
Ток во внутреннем проводнике также вытесняется на поверхность. Но его магнитное поле наводит в наружном проводнике вихревые токи. А их магнитное поле концентрирует ток в центральном проводнике. Это явление называется эффектом близости.
С ростом частоты
это явление усиливается. Поэтому
коаксиальные кабели применяются обычно
с частот выше
![]() .
Потери в коаксиальном кабеле пропорциональны
квадратному корню из частоты. Он
используется на частотах до
.
Потери в коаксиальном кабеле пропорциональны
квадратному корню из частоты. Он
используется на частотах до
![]() ,
некоторые типы – до
,
некоторые типы – до
![]() .
.
3. Волновод.
Если частота
сигнала достаточно высока, то электрическая
и магнитная составляющие сигнала могут
распространяться в свободной среде (не
требуется сплошной проводник). Для того,
чтобы направить распространение сигнала
применяют волновод. Волновод применяется
на частотах от 2 до
![]() для соединения СВЧ передатчиков с
антеннами. Волновод – это просто стальная
оболочка (труба). В неё под давлением
закачивается чистый сухой воздух или
азот.
для соединения СВЧ передатчиков с
антеннами. Волновод – это просто стальная
оболочка (труба). В неё под давлением
закачивается чистый сухой воздух или
азот.
4. Волоконно-оптический кабель.
Волоконно-оптические
кабели (оптоволокно) передаёт сигнал в
световом диапазоне, т.е. на длине волны
(![]() )
(видимый спектр
)
(видимый спектр
![]() ).
В частности, они работают на длине волны
).
В частности, они работают на длине волны
![]() оптоволокно создали в 1968-1970 гг. Преимущества
оптоволоконных каналов:
оптоволокно создали в 1968-1970 гг. Преимущества
оптоволоконных каналов:
- высокие скорости
передачи
![]() на расстояние до
на расстояние до
![]() ,
,
- в/о кабель не излучает энергию, не подвержен действию электромагнитных помех, радиоактивному излучению, более безопасен с точки зрения извлечения информации,
- в/о кабель может быть проложен по взрыво- и пожароопасным местам (нефтехранилища, элеваторы и т.п.),
- оптический кабель легче и дешевле, чем медный, часто в силу дешевизны его прокладывают несколько незадействованных линий для резерва.
Открытые каналы передачи.
В открытых средах носителем сигнала, а следовательно информации, является радиоволны, т.е. электромагнитные колебания.
Электромагнитная
волна характеризуется длиной волны λ,
или периодом э/м колебания Т (а чаще, его
частотой f). Э/м волны распространяются
со скоростью
![]() .
Действует фундаментальное соотношение:
.
Действует фундаментальное соотношение:
![]() .
.
Например, если
частота сигнала равна
![]() (сотовая связь GSM), то длина волны:
(сотовая связь GSM), то длина волны:
![]() .
.
Практическое значение радиоканал приобрёл с открытым радио. В России 1985 г. его изобрёл А.С. Попов, который в 1896 г. передал по радио первую телеграмму “Генрих Герц”, а в 1900 г. обеспечил первый канал радиосвязи между городом Котка и островом Готланд, где шли работы по снятию с мели броненосца “Генерал Апраксин”. Протяженность радиоканала составила 44 км. В США в 1896 г. подал заявку на патент беспроволочного телеграфа и получил в1897 г. этот патент итальянец Гульермо Маркони. Поэтому за границей Г. Маркони считают изобретателем радио, а датой его считают – 1897 г.
В соответствии с Международным регламентом радиосвязи радиоспектр подразделяется на 9 полос или диапазонов.
Номер полосы частотного спектра |
Наименование метрическое |
Диапазон волн |
Диапазон частот |
4 |
Мириаметровые |
|
|
5 |
Километровые |
|
|
6 |
Гектометровые |
|
|
7 |
Декаметровые |
|
|
8 |
Метровые |
|
|
9 |
Дециметровые |
|
|
10 |
Сантиметровые |
|
|
11 |
Миллиметровые |
|
|
12 |
Децимиллиметровые |
|
|
По другой классификации выделяют:
- сверхдлинные волны (СДВ) – диапазон 4,
- длинные волны (ДВ) – диапазон 5,
- средние волны (СВ) – диапазон 6,
- короткие волны (КВ) – диапазон 7,
- ультракороткие (УВК) – диапазоны 8-12.
Общие свойства радиоволн.
1. Дифракция – явление, выражающееся в огибании препятствий. это явление сказывается сильнее всего, когда геометрические размеры препятствий соизмеримы с длиной волны.
2. Рефракция – непрямолинейное распространение в неоднородной среде.
Сверхдлинные и длинные волны. Отличительная особенность волн 4 и 5 диапазонов – их способность хорошо огибать землю. Недостаток этого диапазона – необходимость строить антенны высотой в сотни метров, малая скорость передачи информации. В этих диапазонах созданы очень мощные передатчики для глобальной связи. Это связь с объектами, находящимися на любом расстоянии от передатчика, в том числе с подводными лодками в погруженном состоянии. В этом же диапазоне создания служба передачи точных частот и меток времени для систем связи и навигации. В диапазоне ДВ ведётся радиовещание с АМ.
Средние (гектометровые) волны. Занимают промежуточное положение между ДВ и КВ. В некоторых странах в этом диапазоне сохранилось радиовещание на АМ.
Дециметровые
(короткие) волны.
Обладают свойством отражаться от слоёв
ионосферы. Поскольку отражающие слои
атмосферы смещаются в зависимости от
времени суток, днём для дальней связи
нужно использовать волны длиной
![]() ,
а ночью:
,
а ночью:
![]() ,
в часы восхода и захода Солнца –
,
в часы восхода и захода Солнца –
![]() .
.
Недостаток этого
диапазона – замирание и зоны молчания.
Из-за многолучевого распространения
наблюдается эхо (задержка лучей на
![]() ).
).
Волны длиной короче 10 м. В соответствии с таблицей они разбиты на 5 диапазонов, которые называют общим названием ультракороткие волны (УВК) (англ. Ultra High Frequencies – UHF). главное свойство волн этого диапазона – прямолинейность их распространения, они распространяются только в пределах прямой видимости, прямолинейно (англ. line-of-sign).
Дальность распространения на расстояние прямой видимости составляет:
![]() (км),
(км),
где
![]() и
и
![]() – высоты расположения излучающей и
приёмной антенн (м).
– высоты расположения излучающей и
приёмной антенн (м).
Если поднять антенны на высоту 25 м, то дальность прямой видимости составит 36 км. для передачи сигналов набольшие расстояния нужно либо устанавливать ретрансляторы (промежуточные станции), либо поднимать антенны на большую высоту. Первый принцип используется в радиорелейных линиях. Второй – в размещении излучателей на высоких башнях.
Диапазон УКВ сейчас наиболее используемый. Метровые и дециметровые волны – это телевидение, радиовещание и радиосвязь, в т.ч. мобильная.
Одним из главных преимуществ этого диапазона является возможность создания остронаправленных антенн. Ширина луча антенны (в радианах) грубо оценивается формулой:
![]() ,
,
где L – размер антенны.
В настоящее время в связи УКВ радиодиапазон вытесняется оптоволокном в силу его дешевизны. С другой стороны, УКВ диапазон непрерывно пополняется операторами мобильной (сотовой) связи и таким видом коммуникаций, как спутниковые коммуникации.
Основные принципы спутниковых коммуникаций.
Основной принцип создания спутниковых систем связи заключается в размещении ретрансляторов на ИСЗ. Т.о. спутниковые системы связи – это разновидность радиорелейных систем.
Спутниковая система связи (ССЗ) состоит из:
- наземного сегмента, в которой входят наземные станции приёма-передачи и управления,
- космического сегмента, в который входят ИСЗ с размещёнными на них бортовыми станциями.
Траектория движения ИСЗ называется орбитой. По высоте орбиты ССЗ различают:
- низкоорбитальные
(высота
![]() ),
),
- среднеорбитальные
(![]() ),
),
- высокоорбитальные
(около
![]() ).
).
Особый интерес
представляет геостационарная орбита
– круговая орбита, находящаяся в
экваториальной плоскости и удалённая
от поверхности Земли примерно на
.
Период обращения ИЗС равен 24 часам, ИЗС
кажется неподвижным относительно
наблюдателя (геостационарным). Зона
видимости геостационарного ИСЗ охватывает
почти треть поверхности Земли. Однако
в широтах выше
![]() спутник виден под малыми углами, поэтому
полярные районы обслуживаются плохо.
Главные недостатки геостационарных
спутников:
спутник виден под малыми углами, поэтому
полярные районы обслуживаются плохо.
Главные недостатки геостационарных
спутников:
- высокая стоимость,
- высокая мощность
земного сегмента, что не позволяет
использовать персональные термины,
поскольку их выходная мощность не должна
превышать
![]() .
.
Это является причиной применения низкоорбитальных систем спутниковой связи.
Одной из первых
систем для предоставления услуг
персональной связи является система
Iridium
для дуплексной телефонной связи,
факсимильной связи и передачи данных.
Идея её создания принадлежит компании
Motorola,
которая и
сейчас имеет в ней небольшую долю. Идея,
положенная в основу системы Iridium,
родилась в 1985 г., когда исполнительный
директор компании Motorola
Карэн Бертье, отдыхая на Карибских
островах, не смогла позвонить своему
мужу в США по сотовому телефону.
Первоначально планировалось, что
космический сегмент системы будет
состоять из 77 спутников (что соответствует
77 элементу - иридию). К 1997 г. Iridium
вывел на орбиты 47 спутников производства
Lockheed
Martin,
а в 1988 г. появилось полное созвездие
системы, которое было сокращено по
финансовым причинам до 66 спутников. Они
расположены на 11 квазикруговых орбитах
с высотой
![]() и обеспечивает
покрытия Земли в течение
и обеспечивает
покрытия Земли в течение
![]() всего времени.
всего времени.
Каждый ИСЗ формирует
48 приёмно-передающих лучей в диапазоне
частот
![]() .
Каждый луч освещает на поверхности
Земли соту диаметром 640 км. Все 48 лучей
создают зону покрытия радиусом в 4500 км.
Всего на поверхности земли образуется
примерно 2150 сот. Система почти избыточна.
Скорость передачи речи -
.
Каждый луч освещает на поверхности
Земли соту диаметром 640 км. Все 48 лучей
создают зону покрытия радиусом в 4500 км.
Всего на поверхности земли образуется
примерно 2150 сот. Система почти избыточна.
Скорость передачи речи -
![]() ,
данных -
,
данных -
![]() .
Мощность абонентского передатчика
.
Мощность абонентского передатчика
![]() .
Антенна – штырь длина 8 см.
.
Антенна – штырь длина 8 см.
Система геостационарной спутниковой связи “Инмарсат” существует с 1982 года. В рамках введения проекта “Инмарсат-21” ожидается появление портативных спутниковых терминов.
Глобальная система спутниковой “Глобалстар” также является низкоорбитальной. КС – 48 ИСЗ, высота орбиты 1410 км (8 плоскостей по 6 спутников в каждой).
Лекция № 20.
Системы сотовой связи.
История развития сотовой связи.
По мере развития радиосвязи возникла проблема использования частотного диапазона: стала ощущаться нехватка частот для каждого абонента.
В середине 1940 гг. исследовательским центром Bell Laboratories американской компании AT&T был предложен способ решения проблемы. Идея заключалась в разбиении обслуживаемой территории на небольшие участки, которые стали называться сотами (cell – ячейка, сота, cellular – сотовый). Каждая сота должна была обслуживаться передатчиком с ограниченным радиусом действия и фиксированной частотой. С одной стороны, это экономии частотного ресурса благодаря возможности повторного использования частот в соседних сотах, т.е. за счёт частотного планирования. С другой стороны, это способствовало бы безопасности телекоммуникационных систем, т.к. размер зоны, где ведётся перехват, и прослушивание существенно уменьшается, т.е. за счёт реализации территориального планирования.
Прежде чем, проект
был реализован, прошло более 30 лет. В
1970-х гг. началось создание системы
сотовой связи для Швеции, Финляндии,
Испании, Дании и Норвегии. Проект получил
название Nordic
Mobile
Telephone
NMT-450
и был предназначен для работы на частоте
![]() .
Эксплуатация NMT-450
началась в 1981 г. На базе этого проекта
в 1985 г. был разработан стандарт NMT-900
в диапазоне
.
Эксплуатация NMT-450
началась в 1981 г. На базе этого проекта
в 1985 г. был разработан стандарт NMT-900
в диапазоне
![]() .
.
В конце 1980 гг. начали разрабатываться ССС, основанные на цифровых методах обработки сигналов. Для этих целей 1982 г. Европейская конференция ассоциаций почт и электросвязи (СЕРТ) выделила диапазон и создала группу – Group Special Mobile. В результате в 1990 г. был выработан стандарт цифровой сотовой связи, а GSM стали расшифровывать как Global System for Mobile communication. В 1991 г. в Европе на базе GSM-900 создали стандарт DCS-1800 (Digital Cellular System 1800 MHz), который собственно стал GSM-1800.
В начале 90х годов американская компания Qual comm начала разработку нового стандарта сотовой связи, основанного на шумоподобных сигналах и кодовом разделении каналов (Code Division Multiple Access) – CDMA. В 1993 г. в США от был принят как внутренний стандарт IS-95. А в сентябре 1995 г. в Гонконге была открыта первая коммерческая сеть стандарта IS-95.
В эволюции ССС выделяют три поколения:
- первое – аналоговые системы,
- второе – цифровые системы,
- третье – универсальные системы.
Во всех аналоговых системах применяется частотное разделение каналов (Frequency Division Multiple Access – FDMA), частотная или фазовая модуляция для передачи речи и частотная манипуляция для передачи управляющей информации.
Недостатки:
1) низкая ёмкость, из-за недостаточно рационального разделения полосы;
2) возможность прослушивания другими абонентами;
3) отсутствие эффективных методов борьбы с замираниями сигналов из-за окружающего ландшафта, зданий и перемещения абонентов.
Системы второго поколения основаны на временном разделении каналов (Time Division Multiple Access – TDMA). Затем применили кодовое разделение каналов CDMA. Системы с CDMA назвали поколение 2.5
Преимущества второго поколения:
1) бóльшая помехоустойчивость;
2) лучшее использование частотного диапазона;
3) возможность секретной передачи информации.
Системы третьего поколения – это системы с кодовым разделением каналов и мультимедийным контекстом (наполнение трафика). Сюда относится система CDMA 2000, которая успешно и динамично развивается в Юго-Восточной Азии. Поколение обозначают 1G, 2G, 3G.
Принципы построения систем сотовой связи.
Общие положения.
Система сотовой связи строится в виде совокупности ячеек (сот), покрывающих обслуживаемую территорию. Ячейки обычно изображают в виде правильных шестиугольников. В центре каждой находится базовая станция (БС), обслуживающая все мобильные станции (МС) в пределах своей ячейки. При перемещении абонента с МС между ячейками происходит передача обслуживания МС от новой БС к другой эстафетная передача (англ. – handover, хендовер). Все БС соединены с центром коммутации (ЦК) мобильной связи по выделенным проводным или радиорелейным каналам связи. При больших размерах системы сотовой связи (ССС) в ней могут создаваться дополнительные центры коммутации. С центра коммутации имеется выход на телефонную сеть общего пользования (ТфОП), через которую осуществляется взаимодействие систем мобильной и стационарной связи. При перемещении абонента с МС на территорию другой ССС осуществляется его передача от одной ССС к другой ССС, которая называется роуминг (roaming – блуждающий).
Мобильная станция.
В состав цифровой мобильной станции (МС) входят:
- блок управления,
- приёмопередающий блок,
- антенный блок.

Блок управления включает в себя (микрофон и динамик), клавиатуру и дисплей. Клавиатура предназначена для набора номеров вызываемых абонентов и команд режима работы станции. Дисплей отображает информацию в необходимом режиме.
Приёмо-передающий блок состоит из передатчика, приёмника, синтезатора частот и логического блока.
В состав передатчика входят:
- АЦП, преобразующий в цифровую форму сигнал с выхода микрофона (далее вся обработка осуществляется в цифровой форме);
- коде речи – осуществляет кодирование речи, т.е. преобразование цифрового сигнала с целью сокращения его избыточности;
- кодер канала – осуществляет кодирование канала с целью защиты от ошибок при передаче по радиоканалу, кроме того, он вводит в состав сигнала управляющую информацию, поступающую от логического блока;
- модулятор – осуществляет перенос информации кодированного сигнала на несущую частоту.
В приёмник входят:
- демодулятор, выделяющий из модулированного радиосигнала информационный сигнал,
- эквалайзер предназначен для частичной компенсации искажений сигнала из-за многолучевого распространения,
- декодер канала – обнаруживает и исправляет ошибки в принятом сигнале, а также выделяет и направляет в логический блок управляющую информацию,
- декодер канала – обнаруживает и исправляет ошибки в принятом сигнале, а также выделяет и направляет в логический блок управляющую информацию,
- декодер речи – восстанавливает в цифровом виде речевой сигнал со свойственной ему избыточностью,
- ЦАП преобразует принятый сигнала речи в аналоговую форму.
Логический блок – это микроконтроллер, осуществляющий управление работой МС.
Синтезатор является источником колебаний несущей частоты. Наличие гетеродина и преобразователя частоты связано с тем, что для передачи и приёма используется различные участки диапазона частот.
Антенный блок включает в себя антенну (В простейшем случае - штырь) и коммутатор приёма-передачи. Последний подключает антенну либо на выход передатчика, либо на вход приёмника, т.к. МС никогда не работает на приём и передачу одновременно.
Данная схема является упрощенной. Многие узлы и блоки на ней не показаны.
Для обеспечения конфиденциальности передачи информации, в частности, в системе GSM используется режим шифрования, в этом случае передатчик и приёмник включает в себя блоки шифратора и дешифратора сообщений. В МС системы GSM предусмотрен специальный съёмный модуль идентификации абонента (Subscriber Identify Module – SIM). МС системы GSM включает также детектор речевой активности (Voice Activity Detector), который с целью экономного расходования источника питания (т.е. уменьшение средней мощности излучения), а также снижения уровня помех, создаваемых для других станций при работающем передатчике, включает передатчик на излучение только в те интервалы времени, когда абонент говорит. На время паузы в работе передатчика в приёмный тракт дополнительно вводится комфортный шум.
Базовая станция.
Одной из особенностей организации связи с мобильными абонентами является наличие глубоких замираний в радиоканале. Поэтому на БС применяют разнесённый приём. Это обуславливает необходимость установки на БС не менее двух разнесённых антенн.
Блок-схема базовой станции такова.

Одноимённые приёмники и передатчики имеют общие перестаиваемые генераторы для перехода с одного канала на другой. Приёмник и передатчик имеют ту же структуру, что и МС, за исключением того, что в них отсутствуют АЦП и ЦАП, поскольку и входной и выходной сигналы БС имеют цифровую форму.
Контроллер БС (компьютер) обеспечивает управление работой станции.
Блок сопряжения упаковывает-распаковывает информацию для ЦК. Для связи БС и ЦК обычно используется радиорелейная или волоконно-оптическая линии связи.
Центр коммутации.
Центр коммутации – это автоматическая телефонная станция ССС, обеспечивающая все функции управления сетью. ЦК осуществляет постоянное слежение за МС, их хендовер, переключение каналов в соте при появлении помех и неисправностей.
На ЦК замыкаются потоки информации со всех БС. Через него осуществляется выход на другие сети связи – стационарную телефонную (сеть общего пользования, сети международной связи, спутниковой связи, ССС других операторов).
Схема центра коммутации.

Коммутатор подключается к линиям связи через контроллеры связи, осуществляющие промежуточную обработку (упаковку-распаковку, буферное хранение) потоков информации. Управление работой ЦК и системы в целом производится от центрального контроллера. Работа ЦК предполагает участие операторов.
Важными элементами системы являются базы данных (БД) – домашний регистр, гостевой регистр, центр аутентификации, регистр аппаратуры.
Домашний регистр (регистр местоположения Home Location Register, HLR) содержит сведения обо всех абонентах, зарегистрированных в данной системе, и о видах услуг, которые могут быть им оказаны. В нём фиксируется местоположение абонента для организации его вызова и регистрируются фактически оказанные услуги (биллинг, billing).
Гостевой регистр (регистр местоположения – Visitor Location Register, VLR) содержит сведения об абонентах-гостях (роумерах), т.е. об абонентах, зарегистрированных в другой системе, но пользующихся в настоящее время услугами сотовой связи в данной системе.
Центр аутентификации (Authentification Center, AC) обеспечивает процедуры аутентификации абонентов и шифрование сообщений.
Регистр аппаратуры (регистр идентификации – Equipment Identify Register, EIR) содержит сведения о МС на предмет их исправности и санкционированного доступа. В частности, в нём могут регистрироваться украденные абонентские аппараты, аппараты, имеющие технические дефекты, (например, высокий уровень помех и прочее).
Интерфейсы сотовой связи.
В каждом стандарте сотовой связи используется несколько интерфейсов, в общем случае различных. Предусмотрены интерфейсы для связи МС с БС, БС и ЦК, ЦК и домашнего регистра, ЦК и стационарной телефонной сети и др.
Интерфейс обмена между МС и БС носит название эфирный или радиоинтерфейс (air interface) и для двух основных стандартов цифровой сотовой связи (GMD и D-AMPS) обозначается одинаково Dm, хотя организован по-разному.
Лекция №21