

12 Поняття про дискретні функції і різницеві рівняння
Сигнали в імпульсних системах можна подати представлені у вигляді дискретних функцій часу, тобто функцій, значення яких визначені тільки для дискретних значень аргументу t=n. Між цими значеннями незалежної перемінної дискретна функція дорівнює нулю.
Дискретну функцію можна утворити з будь-якої безупинної функції, якщо взяти до уваги тільки її дискретні значення в рівновідсторонені один від одного моменти часу (рис. 12.1). Ці ординати називають дискретами.
Дискретну функцію позначимо символом х(пТ), де T – період дискретності; п – будь-яке ціле число. Щоб одержати функцію х(пТ) за заданою безупинною функцією x(t), в останній необхідно замінити t на n.

Рисунок 12.1 – Безупинна (а) і дискретна (b) функції
Приклади безупинних функцій і відповідних їм дискретних функцій наведені нижче.
Безупинна функція Дискретна функція
x(t) x(n)
l(t) 1(пТ)
At АпТ
At2 A(nT)2
e-at e-ant
sinct sincnT
Відмітимо, що дискретна функція не є однозначною: їй можуть відповідати різні безупинні чи розривні функції, якщо тільки їх ординати в моменти часу t=пТ дорівнюють значенням функції х(пТ). Для усунення цієї неоднозначності в розгляд уводять зміщені дискретні функції, що дозволяють «переглядати» процеси усередині періодів дискретності Т.
Іноді
зручно перейти до відносного масштабу
часу
![]() .
При цьому інтервал між дискретами стає
рівним одиниці.
.
При цьому інтервал між дискретами стає
рівним одиниці.
Як відомо, швидкість зміни безупинної функції визначається її першою похідною. Швидкість зміни дискретної функції х(пТ) характеризується її першою різницею, поділеною на період дискретності Т. Отже, аналогом диференціалів для дискретних функцій є різниці, а інтегралів – суми.
Перша різниця, чи різниця першого порядку, дискретної функції
x(n) x(n)=x(n)-x(n) також є дискретною функцією часу. Друга різниця, чи різниця другого порядку, визначається як перша різниця від першої різниці:
![]()
або
![]()
Різниця
k – го порядку
![]()
Розглянемо
приклад. Дано дискретну функцію
![]() (рис.
12.2).
(рис.
12.2).
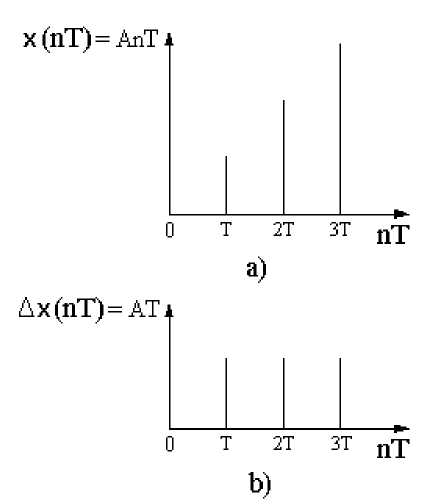
Рисунок 12.2 – а) дискретна функція і b) її перша різниця
Її
перша різниця
![]() є
одиничною східчастою
дискретною функцією. Друга і вищі різниці
цієї функції дорівнюють
нулю.
є
одиничною східчастою
дискретною функцією. Друга і вищі різниці
цієї функції дорівнюють
нулю.
Часто на практиці обчислюють запізнілу різницю, яку легше одержати технічними засобами:
![]()
Відомо, що дослідження динаміки безупинних систем засновано на складанні і вирішенні диференціальних рівнянь. Динамічні процеси в дискретних автоматичних системах описуються різницевими рівняннями, або рівняннями в кінцевих різностях. Лінійне неоднорідне різницеве рівняння з постійними коефіцієнтами має такий вигляд
![]()
де
![]() – відома дискретна функція (яка задає
вплив);
– відома дискретна функція (яка задає
вплив);
![]() –
дискретна
функція, обумовлена рівнянням (рішення);
–
дискретна
функція, обумовлена рівнянням (рішення);
![]() – різниці 1–х
порядків;
bi
і
ci
– постійні
коефіцієнти.
– різниці 1–х
порядків;
bi
і
ci
– постійні
коефіцієнти.
Контрольні запитання
Що таке дискретна функція часу?
Що є аналогами диференціалів і інтегралів при використанні дискретних функцій часу?
Чим описуються динамічні процеси в дискретних системах радіоавтоматики?