

1.Понятие «металлорежущий станок».
Металлоре́жущий стано́к — станок, предназначенный для размерной обработки металлических заготовок путем снятия материала механическим способом.
Металлорежущий станок, машина для обработки резанием металлических и др. материалов, полуфабрикатов или заготовок с целью получения из них изделий путём снятия стружки металлорежущим инструментом.
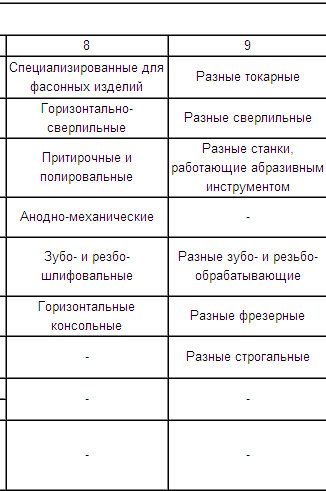
Классификация М. с. По специализации различают М. с. универсальные для выполнения разнообразных операций на изделиях широкой номенклатуры; широкого назначения для выполнения ограниченного числа операций на изделиях широкой номенклатуры; специализированные для обработки однотипных изделий разных размеров; специальные для обработки изделий одного типоразмера; агрегатные — специальные, состоящие из нормализованных деталей, узлов, силовых головок.
М. с. могут быть с ручным управлением (загрузка и установка заготовок, пуск, переключение режима обработки, холостые движения, снятие изделия — вручную), а также иметь различную степень автоматизации: полуавтоматы (установка заготовок, пуск, снятие изделия — вручную, остальные движения цикла обработки — автоматически), автоматы (все рабочие и холостые движения производятся автоматически, человек осуществляет контроль за циклом работы); могут составлять автоматические линии (группа автоматов, объединённая системой транспортировки заготовок от одного к другому); иметь числовое программное управление (все рабочие и холостые движения обеспечиваются заранее закодированной программой, введённой в М. с. и посылающей преобразованные импульсы на исполнительные и управляющие механизмы).
Классификация металлорежущих станков
Станки классифицируются по множеству признаков.
По классу точности металлорежущие станки классифицируются на пять классов:
(Н) Нормальной точности
(П) Повышенной точности
(В) Высокой точности
(А) Особо высокой точности
(С) Особо точные станки (мастер-станки)
Классификация металлорежущих станков по массе:
лёгкие (< 1 т)
средние (1-10 т)
тяжёлые (>10 т)
уникальные (>100 т)
Классификация металлорежущих станков по степени автоматизации:
ручные
полуавтоматы
автоматы
станки с ЧПУ
гибкие производственные системы
Классификация металлорежущих станков по степени специализации:
универсальные. Для изготовления широкой номенклатуры деталей малыми партиями. Используются в единичном и серийном производстве. Также используют при ремонтных работах.
специализированные. Для изготовления больших партий деталей одного типа. Используются в среднем и крупносерийном производстве
специальные. Для изготовления одной детали или детали одного типоразмера. Используются в крупносерийном и массовом производстве
Формообразующие движения
Основная статья: Формообразующие движения
Для осуществления процесса резания на металлорежущих станках необходимо обеспечить взаимосвязь формообразующих движений.
У металлорежущего станка имеется привод (механический, гидравлический, пневматический), с помощью которого обеспечивается передача движения рабочим органам: шпинделю, суппорту и т. п. Комплекс этих движений называется формообразующими движениями. Их классифицируют на два вида:
1) Основные движения (рабочие), которые предназначены непосредственно для осуществления процесса резания:
а) Главное движение Dг — осуществляется с максимальной скоростью. Может передаваться как заготовке (например в токарных станках) так и инструменту (напр. в сверлильных, шлифовальных, фрезерных станках). Характер движения: вращательный или поступательный. Характеризуется скоростью — v (м/с).
б) Движение подачи Ds — осуществляется с меньшей скоростью и так же может передаваться и заготовке и инструменту. Характер движения: вращательный, круговой, поступательный, прерывистый. Виды подач:
подача на ход, на двойной ход Sx. (мм/ход), Sдв.х. (мм/дв.ход);
подача на зуб Sz (мм/зуб);
подача на оборот So (мм/оборот);
минутная подача Sm (мм/мин).
2) Вспомогательные движения — способствуют осуществлению процесса резания, но не участвуют в нём непосредственно. Виды вспомогательных движений:
наладка станка;
задача режимов резания;
установка ограничителей хода в соответствии с размерами и конфигурациями заготовок;
управление станком в процессе работы;
установка заготовки, снятие готовой детали;
установка и смена инструмента и прочие.
2.Алгоритм проектирования привода главного движения.
Особенности проектирования и расчет ПГД станка.
Алгоритм проектирования главного привода МРС включает: предварительный анализ исходных технологических данных по обработке заданной совокупности деталей и технических требований к станку и определение технических характеристик номинальной мощности. Значение минимальной и максимальной частоты вращения диапазонов регулирования скорости и других необходимых для кинематического синтеза и проектировочно- силовых расчетов. Выбор схемы построения привода, обеспечивающего основные требования характеристики. Выбор производного электродвигателя по номинальной мощности и схемы построения привода, синтез кинематики привода на основе выбора схем построения определяющая..
Проектирование и расчет приводов главного движения (ПГД)
Назначены
ПГД МРС служат для обеспечения относительного перемещения заготовки и режим инструмента при котором инструмент производит резание метала. Главным движением м.б. как вращательным (многоцелевых, шлифовальных станках) так и возвратно-поступательное (строгальные, долбежные, протяжные). ПГД выполняют следующие основные функции:
- передача мощности (крутящего момента)
- регулирование скорости
- повышенные или пониженные скорости (двигателя к рабочему организму)
- включенние, выключенние, торможение, реверсирование.
Виды приводов:
В МРС преимущество примыкают:
Электромеханические приводы ПГД у которых электрическая часть (электро-привод) состоит из электродвигателя переменного или постоянного тока и преобразующихся управляющих устройств, а их часть состоит из отдельных передач (зубчатых, временных, фрикционных и др.), передаточных механизмов (зубчатых редукторов, коробок, скор., кулисных и кулачковых механизмов) и их комбинаций. Вст. С прямолинейным, возвратно-поступательным главным движением (строг, долб, протяжных) наряду с электромеханизмами привода (Г,П). ГП главным движениям приводят гидродвигатель (силовой, гидроцилиндрический, гидромоторный), с источточником энергии , насосом и управляющими устройствами, а также передача от гидродвигателя к рабочему органу.
Требования к приводам:
К ПГД станков предъявлен ряд требований: общих и специфических, связанных с назначением станка конкретного типа. Соответствие антискачковых характеристик привода (максимальных скоростей перемещения мощности, крутящего момента, характера и диапазон регулирования скорости). Технологическим требованием обеспечивающих обработку деталей с задней номенклатурой, производительностью, точностью и параметрами шероховатости поверхности.
Обеспечение заданных конструктивно-технических требований по характеристикам точности перемещения рабочего органа, уровню автоматизации, управление приводом, удобство колпаковки, достаточная надежность привода в эксплуатации (в том числе ограничения перегрузок при переходных процессах). Минимальные энергетические потери (высокий коэфицент полезного действия привода), обеспечение уровня действия шума допустимого предела, широкое применение унифицированных, типовых, стандартизируемых узлов, агрегатов и элементов главного привода, рациональные габариты, материалоемкость, стоимость привода. Виды и способы регулирования. Регулирование скорости осуществляемых в приводах изменением частоты вращения (скорость перемещения) двигателя, изменение передаточного отношения между двигателем и рабочим органом в проводном механизме; Регулирование может осуществляться:
При постоянной предельной мощности во всем диапазоне скоростей.
При постоянном предельном моменте.
При комбинировании обоих видов регулирования.
3.Интеграция CAD- и CAM- систем.
Вопрос интегрированности САПР был довольно детально рассмотрен ранее, в этой части рассматривается вопрос практической интеграции. Интеграция с другими программными продуктами осуществляется в двух направлениях
Интеграция на стадии проектирования
Интеграция на других стадиях жизненного цикла
На сегодняшний день не существует программных продуктов, способных поддерживать информационную модель объекта на всех стадиях жизненного цикла. Развитие в этом направлении идёт по пути интеграции различных программных продуктов на базе CALS – технологий. Поэтому ниже рассматриваются вопросы интеграции САПР на стадии проектирования.
Обычно на предприятии используются различные программы, которые нуждаются в специальном интерфейсе для передачи данных между собой, что может привести к потере точности, а иногда и к повторному заданию одних и тех же данных. Одним из способов обеспечения интеграции разных пакетов или приложений является использование стандартных форматов файлов для обмена данными. Интеграция позволяет импортировать изображения, сделанные в другой системе и экспортировать в нее на основе стандартных и прямых интерфейсов для обмена данными об изделиях с другими современными CAD / CAM / CAE системами – DXF , IGES , VDA , SAT , STEP , STL форматами передачи данных. Используя для передачи графической информации эти форматы, пользователи могут в определенной мере реализовать связь между программами и достаточно легко обмениваться файлами с данными со многими другими модулями, приложениями и системами.
Однако эти форматы являются низкоуровневыми и не могут обеспечить передачу всего набора данных, которые существуют в современных программах. Кроме того, функции чтения-записи этих форматов в различных программах реализованы по разному, что часто приводит к несовместимости. Также необходимо учесть, что хотя эти стандартные форматы постоянно улучшаются, они, все таки, не успевают соответствовать расширением функциональности современных программ. В этом случае более продуктивным является использование программ, базирующихся на едином геометрическом ядре ( ACIS , PARASOLID ) или, что менее желательно на основе Parasolid , CATIA , EDS / UG и других трансляторов. Хотя обмен все равно будет идти на низком уровне, но будет существовать уверенность в том, что данные передаются достаточно корректно и без потери точности.
Интеллектуальное преобразование данных, контроль ошибок и специальные алгоритмы для решения возможных проблем при преобразовании позволят оптимизировать передачу и гарантировать стопроцентное качество. Наличие интерфейса позволяет увеличить скорость передачи и точность, параллельно позволяет пользователю осуществлять контроль над эти процессом.
Как обсуждалось ранее, интегрированная САПР может основываться программном комплексе, базирующихся на каком-то основном программном продукте. Разработчики такого ПО предлагают набор программ, которые либо работают в рамках единой программной среды, либо имеют хорошо отлаженное взаимодействие между собой. Однако и этот способ интеграции не может считаться идеальным:
в имеющемся комплексе могут отсутствовать программы из каких-либо областей проектирования, которые необходимы предприятию
лучше иметь широкий выбор прикладных программ различных разработчиков
предприятие может разрабатывать свои собственные приложения, что потребует интеграции со всем комплексом
Для преодоления вышеописанных недостатков интегрированных комплексов разработчики предлагают специальные механизмы доступа к внутренним функциям свои программ, что позволяет создавать встроенные интегрированные решения для сторонних разработчиков, включая пользователей этих программ, но пока отсутствуют данные об уровне эффективности использования таких систем.
Суммируя вышесказанное об интегрированных САПР можно выделить комплекс типовых, относительно самостоятельных задач, требующих решения основе интеграции:
Расчёты на прочность . Выполняются либо в специализированных пакетах, либо в расчётных пакетах общего назначения Некоторые пакеты встраиваются в базовую графическую систему либо возможен обмен 3D моделями через форматы графических ядер, и стандартные форматы обмена данными
Обработка спецификаций . Материалы полученных спецификаций используются для формирования различных технических документов. Для этих целей могут применяться специализированные пакеты или электронные таблицы. Спецификации должны быть представлены в нейтральном формате - в виде форматированного текста, который может обрабатываться практически любой системой.
Выпуск чертежей. Обеспечивается базовой графической системой
Визуализация . Результаты визуализации используются для подготовки рекламных материалов, презентаций и других материалов для работы с клиентами. Они могут быть представлены в различных форматах, включая анимационные и панорамные. Визуализация может выполняться базовой графической системой, специальной подсистемой визуализации или специальным пакетом. В последнем случае, необходим экспорт модели в соответствующий формат (.DXF, Parasolid, IGES). Выходные форматы статических видов для Web – публикаций .GIF и .JPG, поддерживаемые броузерами Internet Explorer и Netscape Navigator
Web – публикации . Автоматизация Web–публикаций для участников проекта и частично для клиентов возможна с помощью средств базовой графической системы Более мощным средством автоматизации является специальное серверное П/О. При отсутствии названных или подобных средств, а так же в случае особых требований к результатам, применяется прямое программирование HTML кода.
4.Классификация станков.
Классификация металлорежущих станков
Станки классифицируются по множеству признаков.
По классу точности металлорежущие станки классифицируются на пять классов:
(Н) Нормальной точности
(П) Повышенной точности
(В) Высокой точности
(А) Особо высокой точности
(С) Особо точные станки (мастер-станки)
Классификация металлорежущих станков по массе:
лёгкие (< 1 т)
средние (1-10 т)
тяжёлые (>10 т)
уникальные (>100 т)
Классификация металлорежущих станков по степени автоматизации:
ручные
полуавтоматы
автоматы
станки с ЧПУ
гибкие производственные системы
Классификация металлорежущих станков по степени специализации:
универсальные. Для изготовления широкой номенклатуры деталей малыми партиями. Используются в единичном и серийном производстве. Также используют при ремонтных работах.
специализированные. Для изготовления больших партий деталей одного типа. Используются в среднем и крупносерийном производстве
специальные. Для изготовления одной детали или детали одного типоразмера. Используются в крупносерийном и массовом производстве


5.Технико-экономические показатели станков.
Одним из основных требований, которые предъявляются к современным металлорежущим станкам являются требования точности работы. Под термином точность работы станка понимается стабильность обеспечения станком получения заданной геометрической формы обрабатываемой детали, качества ее поверхности и точности размеров, определяющих основные параметры формы. Точность работы станка зависит от многих факторов, связанных с проектированием и изготовлением станка, правильности его эксплуатации и своевременного профилактического ремонта станка. Повышение точности станка достигается совершенствованием технологии изготовления его деталей и сборки его узлов, а сохранение первоначальной точности на длительное время в эксплуатационных условиях - тщательностью ухода и принудительным профилактическим осмотром.
Другим не менее важным показателем работы станка является его производительность. Производительность станка характеризуется различными показателями, из которых наиболее простым и наглядным является количество обрабатываемых деталей в единицу времени. Этот показатель является относительным, так как на одном и том же станке при различной его настройке и наличии тех или иных приспособлений, особенно на станке универсального назначения, можно получить различные значения этого показателя. Для достижения максимальной производительности основное внимание должно быть обращено на сокращение вспомогательного времени, связанного со сменой заготовки, инструмента и управлением циклом обработки на станке. При прочих равных условиях многоинструментальная обработка является одним из способов повышения производительности. Максимальное сокращение вспомогательного времени и возможность применения многоинструментальной обработки обеспечивается автоматизацией цикла работы станка.
На универсальных станках с ручным управлением производительность достигается путем рационального и удобного расположения органов управления, применения преселективного управления, позволяющего сократить время и перестройку режимов обработки, путем предварительного, в процессе рабочего хода на предыдущей операции, набора нужного сочетания блочных колес коробок скоростей и подач, требуемых на следующей операции. Автоматизация управления металлорежущим станком является основным направлением развития современного станкостроения. Автоматизированные станки получили широкое внедрение не только в крупносерийном и массовом производстве, но начали широко применяться и при мелкосерийном и единичном производстве. Последнему способствует появившиеся в последнее время станки с программным управлением, которые, как указывалось выше, могут легко переналаживаться на обработку любой детали.
Способность станка работать безотказно и обеспечивать бесперебойную обработку деталей в заданных условиях эксплуатации называется надежностью. Степень надежности характеризуется так называемым коэффициентом надежности и определяется статистическим путем, как отношение фактического времени работы станка к запланированному

где Тпр — время простоя станка вследствие неисправностей;
Трп — время рабочего периода. Значение коэффициента надежности колеблется в пределах 0,8—0,98.
Под понятием долговечность подразумевается срок службы станка в заданных условиях эксплуатации, когда затраты на восстановление его работоспособности экономически целесообразны. Большое значение для обеспечения нужного класса чистоты обрабатываемых деталей, стабильности работы станка, увеличения его надежности и долговечности является жесткость конструкции станка, что позволяет исключить или снизить возможность появления в процессе работы станка вибраций нежелательной частоты. Виброустойчивость станка обеспечивается не только увеличением массы корпусных деталей, но также учетом возможных источников возникновения вибраций и создания рациональных конструкций. В этом направлении ведутся теоретические и опытные изыскания по разработке методов расчета динамической прочности конструкции станка.
Рациональная конструкция станка и отдельных его механизмов, в свете требований охраны труда, считается такой, которая обеспечивает бесшумность его работы. При конструировании нового станка необходимо обеспечивать условия «технологичности конструкции». Под этим понятием подразумевается соблюдение при проектировании ряда условий, обеспечивающих возможность применения при обработке и сборке деталей станка наиболее прогрессивных и экономичных технологических процессов.
Технологичность конструкции характеризуется: себестоимостью станка, как суммарного показателя трудоемкости и металлоемкости, конструкции; сроком оборачиваемости средств, связанным с длительностью производственного процесса изготовления станка, степенью унификации узлов станка и нормализацией его деталей.
6.Гидостатические направляющие.
Гидростатические направляющие более широко распространены в металлорежущих станках. Они обеспечивают жидкостную смазку при любых скоростях скольжения, а значит, и равномерность, и высокую чувствительность точных исполнительных движений. Недостатком гидростатических направляющих является сложность системы смазывания и необходимость специальных устройств для фиксации перемещаемого узла в заданной позиции.
По характеру восприятия нагрузки гидростатические направляющие делятся на открытые и замкнутые. Открытые направляющие предназначены для восприятия прижимающих нагрузок, а замкнутые (они же закрытые) могут воспринимать, кроме того, и значительные опрокидывающие моменты.
Гидростатические направляющие имеют карманы, в которые под давлением подается масло. Вытекая наружу через зазор оно создает масляную подушку по всей площади контакта. При этом толщину масляного слоя можно регулировать - это позволяет повысить жесткость открытых(незамкнутых) гидростатических опор.
Система питания гидростатических направляющих.
По виду питания системы различают:
Насос- карман
Дроссельное
С использованием регулятора.
Во первых в каждый карман подводиться постоянное количество масла от отдельного насоса или от многопоточных насосов.
Во вторых один насос подает масло через дроссель и к каждому карману. При этом давление в насосе всегда больше, чем карманов. Дроссельная система, применяется в направляющих , где нагрузка меняется до 2-х раз. Систему питания насос-карман используют при отношении максимальной нагрузки к минимальной, раной 3-4 при больших опрокидывающих моментах. В тяжелых и уникальных станках для обеспечения высокой несущей способности применяют комбинированную системы деталей насос-карман и дроссельные, в которых масло подается в карманы через дроссель. А в зависимости от нагрузки в работу включается 1,2, или 3 насоса. Наиболее современные и более сложные – системы питания с регуляторами. Сопротивление каждого регулятора измеряется в зависимости от нагрузки. При этом обеспечивается распределение расхода на карман и повышение жесткости масленого слоя.
7. Наладка и измерение заготовок и инструмента.
Наладка и измерение заготовок и инструмента
Измерительные щупы для заготовок
Щупы для заготовок серии TS фирмы HEIDENHAIN позволяют выполнять юстировку, измерения и контроль прямо на станке. Измерительный стержень щупа TS отгибается в сторону при касании поверхности заготовки. При этом щуп генерирует коммутационный сигнал, который, в зависимости от типа прибора, передается через кабель или через инфракрасный передатчик в ЧПУ. Система ЧПУ в этот момент сохраняет фактическое положение оси измерительного прибора и обрабатывает его впоследствии. Коммутационный сигнал образуется оптическим сенсором, работающим без износа, и отличается большой надежностью.
Измерительные щупы для инструмента
Измерение инструмента на станке экономит время, повышает точность обработки заготовок, снижает количество брака и последующих доработок. HEIDENHAIN предлагает два способа измерения инструмента: контактный, при помощи щупов серии TT, и бесконтактный – лазерные системы TL.
Благодаря прочной конструкции и высокой степени защиты измерительные щупы для инструмента могут быть без проблем установлены в рабочем пространстве станка. Замер инструмента может быть произведен в любой момент – между двумя шагами обработки или по завершении обработки заготовки.
Лазерная система TL
С помощью лазерной системы TL Micro и TL Nano можно производить бесконтактные измерения инструмента при их номинальной скорости вращения. Циклы измерения предоставляют возможность измерения длины и диаметра инструмента, помогают контролировать форму отдельных зубцов, износ инструмента и находить трещины и поломки
инструмента. Полученные результаты измерений ЧПУ записывает в таблицу инструментов.
8.Точность шпиндельных узлов.
Точность ШУ.
Точность ШУ характеризует радиальное и осевое (торцовое) биение шпинделя. Смещение мгновенное оси поворота шпинделя, называемая погрешность вращения. Радиальное биение возникает вследствие взаимных эксцентриситетов шпинделя отверстий и дорожек качения ПК. Осевое биение возникает вследствие взаимного биения торцов допустимую величину у биений регламентируют стандарты и ТУ на станках в целом. Поэтому выбор класса точности ПК, устанавливаемых в ШУ в первом приближении можно проводить в соответствии с классом точности станков, осуществляя последующую проверку по общеизвестным формула в векторного суммирования биений. Эффективным средством уменьшения радиального биения является сборка с ориентацией эксцентриситетов колец ПК и шеек шпинделя. С этой целью изготовители ПК делают отметки на кольцах подшипника в местах наибольшего биения.
Точность вращения шпинделей металлорежущих станков определяется стандартами в зависимости от типа, класса точности и назначения станка, а для специальных и специализированных станков — техническими требованиями.
Жесткость шпинделя задается стандартами на нормы жесткости для соответствующего типа станка. Если таковые отсутствуют, то допустимый прогиб конца шпинделя численно не должен превышать одной трети допуска на радиальное биение шпинделя.
Виброустойчивость должна обеспечивать заданную точность и качество обработки. Собственная частота изгибных колебаний шпинделя не должна быть ниже 200 Гц, а в ответственных случаях — 500 Гц. Быстроходность шпинделя и диапазон регулирования частот вращения зависят от назначения, конструктивных и технологических особенностей станков. Несущая способность шпиндельных опор обеспечивается правильным выбором их размеров, смазочного материала и метода его подачи.
9.Движение резания, движение подачи.
Движение рабочих органов станка подразделяют на 3 основных группы
1-основное движение резания 2-установочные движения резания 3-вспомогательные
Движения которые обеспечивают срезание с заготовки слоя материала или вызывают изменения состояния обрабатываемой поверхности заготовки называют основными движениями резания
К ним относятся 1-гланое движение резания 2-вспомогательное движение резания
За главное движение резания принимают движение, которое определяет скорость деформирования и отделения стружки
За движение подачи принимают движение которое обеспечивает непрерывность врезания режущей кромки инструмента в материал заготовки
Движение подачи может быть непрерывным или прерывистым, вращательным и поступательным, возвратно-поступательным
Скорость главного движения обозначают буквой – V , а скорость движения подачи - Vs
Движения обеспечивающие взаимное положение инструмента к заготовке для срезания с нее определенного слоя материала называют установочными
К вспомогательным движениям относят транспортировку заготовки, закрепление заготовки инструмента, быстрое переключение скорости движения резания и движения подачи
Обработка резанием является завершение технологическим процессом, обеспечивающим точность работы машины, правильности распределения нагрузок между деталями машин, а следовательно в значительной степени их качества и работоспособности
Методы образования поверхностей (следа, копирования, обката и тд.)
Большинство поверхностей деталей машин может быть образовано прииспользовании в качестве производящих линий прямой, окружности, эвольвенты, винтовой и ряда других линий. В реальных условиях обработки производящие линии воспроизводятся комбинацией согласованных между собой вращательных и прямолинейных перемещений инструмента и заготовки. Движения, необходимые для этого, называют рабочими формообразующими движениями. Они могут быть простыми, состоящими из одного движения, и сложными, состоящими из нескольких простых движе-ний. Существуют четыре метода образования производящих линий: копирования, огибания, следа и касания.
Метод копирования основан на том, что режущая кромка инструмента по форме совпадает с производящей линией. Например, при получении цилиндрической поверхности (рис. 2,а) образующая линия / воспроизводится копированием прямолинейной кромки инструмента, а направляющая линия 2 - вращением заготовки. Здесь необходимо одно формообразующее движение - вращение заготовки. Для снятия припуска и получения детали заданных размеров необходимо поперечное перемещение резца, но это движение (установочное) не является формообразующим.
На рис. 2,б показан пример обработки зубьев цилиндрического колеса.
Контур режущей кромки фрезы совпадает с профилем впадин и воспроизводит образующую линию. Направляющая линия получается при прямолинейном движении заготовки вдоль своей оси. Здесь необходимы два формообразующих движения: вращение фрезы и прямолинейное перемещение заготовки. Кроме того, для обработки последующих впадин заготовка должна периодически поворачиваться на угол, соответствующий шагу зацепления. Такое движение называют делительным.
Метод огибания (обката) основан на том, что образующая линия возникает в форме огибающей ряда положений режущей кромки инструмента в результате его движений относительно заготовки. Режущая кромка отличается по форме от образующей линии и при различных положениях инструмента является касательной к ней. На рис. 2,в показана схема обработки зубьев цилиндрического колеса по методу огибания. Режущая кромка инструмента имеет форму зуба зубчатой рейки. Если заготовке сообщить вращение и согласованное с ним прямолинейное перемещение рейки вдоль ее оси, то режущий контур инструмента в своем движении относительно заготовки будет иметь множество положений. Их огибающей явится образующая зуба колеса. Направляющая линия по предыдущему образуется в результате прямолинейного перемещения инструмента или заготовки вдоль оси колеса. Для рассматриваемого случая требуются три формообразующих движения: вращение заготовки, перемещение инструмента вдоль своей оси, перемещение инструмента или заготовки вдоль оси зубчатого колеса.
Метод следа состоит в том, что образующая линия получается как след движения точки — вершины режущего инструмента. Например, при точении образующая 1 (рис. 2,г) возникает как след точки А — вершины резца, а при сверлении (рис. 2,д) — как след сверла. Инструмент и заготовка перемещаются относительно друг друга таким образом, что вершина А режущего инструмента все время касается образующей линии 1. В первом случае (рис. 2,г) направляющая линия получается в результате вращения заготовки, во втором случае (рис. 2,д) — при вращении сверла или заготовки. В обоих случаях требуются два формообразующих движения.
Метод касания основан на том, что образующая линия / является касательной к ряду геометрических вспомогательных линий 3, образованных реальной точкой движущейся режущей кромки инструмента (рис. 2,е).

Координатные плоскости и системы координатных плоскостей, используемые при анализе режущих инструментов
1 – обрабатываемая поверхность,
2 — обработанная поверхность,
3 – поверхность резания – образуется на обрабатываемой детали непосредственно реж кромкой инструмента, и явл переходной между 1 и 2
 Ps
– рабочая плоскость, V – вектор скорости
резания, Vs – вектор скорости движения
подачи, Ve – вектор скорости результирующего
движения.
Ps
– рабочая плоскость, V – вектор скорости
резания, Vs – вектор скорости движения
подачи, Ve – вектор скорости результирующего
движения.
Dг – главное движение, Ds – движение подачи, De – результирующее движение.
6 Инструментальных плоскостей:
1)основная пл рез – в ней находится инструмент в статич состоянии
2)главная пл рез – проходит через гл режущую кромку и перпендикулярная 1)
3)вспомогательная пл рез –прозодит через вспомогательную реж кромку и перпендикулярная 1)
4)гл секущая инстр пл – перпендикулярная гл реж кромке и перпендикулярная 1)
5) вспомогательная секущая инстр пл – перпендикулярна вспомогательной реж кромке и перпендикулярная 1)
6)рабочая инстр пл – проходит по направлению подачи через вершину резца и перпендикулярная 1)
10. Электрохимическая обработка.
Электрохимическая обработка (ЭХО) — способ обработки электропроводящих материалов, основанный на анодном растворении материала при высоких плотностях электрического тока.

Анодное растворение происходит без контакта между электродом на некотором расстоянии друг от друга
Растворение происходит в межэлектронном зазоре путем воздействия электрического тока
Конфигурация электрического поля определяется (формируется) электродом инструментом
Процесс подчиняется законам электролиза
Межэлектронный промежуток составляет от 0,01 до 0,3 мм
Поток электролиза движется от 5 до 50 м/с
Существует 3 стадии в процессе
Физический процесс
Химический процесс
Эл-хим процесс
Физико-химическая сущность метода
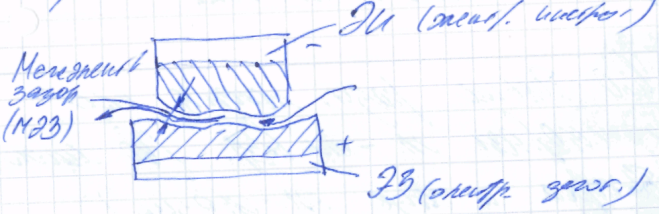
Механизм съема (растворения, удаления металла) при электрохимической обработке основан на процессе электролиза. Съем металла происходит по закону Фарадея, согласно которому количество снятого металла пропорционально силе тока и времени обработки. Один из электродов (заготовка) присоединен к положительному полюсу источника питания и является анодом, а второй(инструмент) — к отрицательному; последний является катодом.
Особенностями электролиза являются пространственное окисление (растворение) анода и восстановление (осаждение) металла на поверхности катода.
При ЭХО применяют такие электролиты, катионы которые не осаждаются при электролизе на поверхности катода. Этим обеспечивается основное достоинство ЭХО перед электроэрозионной обработкой — неизменность формы электрода-инструмента(ЭИ).
Для стабилизации электродных процессов при ЭХО и удаления из межэлектродного промежутка(МЭЗ) продуктов растворения (шлама) применяют принудительную подачу в рабочую зону электролита, то есть прокачивают его с определенным давлением.
Электрохимический станок - прибор, принцип работы которого основывается на использовании метода электрохимического анодного растворения под действием импульсного тока высокой плотности, предназначенный для прецизионной электрохимической размерной обработки практически всего дипазона металлов и сплавов: инструментальные, конструкционные, легированные стали, сплавы меди, алюминия, а также драгметаллы. Станки могут быть применены для изготовления штампов, пресс-форм и прочей формообразующей оснастки, которая используется на производстве фурнитуры, медицинского инструмента, медалей, ювелирных изделий, бижутерии, деталей механизмов приборов и других изделий, требующих высокой точности обработанной поверхности
11.Методы формообразования поверхностей деталей при обработке на МРС.
Методы образования поверхностей (следа, копирования, обката и тд.)
Большинство поверхностей деталей машин может быть образовано прииспользовании в качестве производящих линий прямой, окружности, эвольвенты, винтовой и ряда других линий. В реальных условиях обработки производящие линии воспроизводятся комбинацией согласованных между собой вращательных и прямолинейных перемещений инструмента и заготовки. Движения, необходимые для этого, называют рабочими формообразующими движениями. Они могут быть простыми, состоящими из одного движения, и сложными, состоящими из нескольких простых движе-ний. Существуют четыре метода образования производящих линий: копирования, огибания, следа и касания.
Метод копирования основан на том, что режущая кромка инструмента по форме совпадает с производящей линией. Например, при получении цилиндрической поверхности (рис. 2,а) образующая линия / воспроизводится копированием прямолинейной кромки инструмента, а направляющая линия 2 - вращением заготовки. Здесь необходимо одно формообразующее движение - вращение заготовки. Для снятия припуска и получения детали заданных размеров необходимо поперечное перемещение резца, но это движение (установочное) не является формообразующим.
На рис. 2,б показан пример обработки зубьев цилиндрического колеса.
Контур режущей кромки фрезы совпадает с профилем впадин и воспроизводит образующую линию. Направляющая линия получается при прямолинейном движении заготовки вдоль своей оси. Здесь необходимы два формообразующих движения: вращение фрезы и прямолинейное перемещение заготовки. Кроме того, для обработки последующих впадин заготовка должна периодически поворачиваться на угол, соответствующий шагу зацепления. Такое движение называют делительным.
Метод огибания (обката) основан на том, что образующая линия возникает в форме огибающей ряда положений режущей кромки инструмента в результате его движений относительно заготовки. Режущая кромка отличается по форме от образующей линии и при различных положениях инструмента является касательной к ней. На рис. 2,в показана схема обработки зубьев цилиндрического колеса по методу огибания. Режущая кромка инструмента имеет форму зуба зубчатой рейки. Если заготовке сообщить вращение и согласованное с ним прямолинейное перемещение рейки вдоль ее оси, то режущий контур инструмента в своем движении относительно заготовки будет иметь множество положений. Их огибающей явится образующая зуба колеса. Направляющая линия по предыдущему образуется в результате прямолинейного перемещения инструмента или заготовки вдоль оси колеса. Для рассматриваемого случая требуются три формообразующих движения: вращение заготовки, перемещение инструмента вдоль своей оси, перемещение инструмента или заготовки вдоль оси зубчатого колеса.
Метод следа состоит в том, что образующая линия получается как след движения точки — вершины режущего инструмента. Например, при точении образующая 1 (рис. 2,г) возникает как след точки А — вершины резца, а при сверлении (рис. 2,д) — как след сверла. Инструмент и заготовка перемещаются относительно друг друга таким образом, что вершина А режущего инструмента все время касается образующей линии 1. В первом случае (рис. 2,г) направляющая линия получается в результате вращения заготовки, во втором случае (рис. 2,д) — при вращении сверла или заготовки. В обоих случаях требуются два формообразующих движения.
Метод касания основан на том, что образующая линия / является касательной к ряду геометрических вспомогательных линий 3, образованных реальной точкой движущейся режущей кромки инструмента (рис. 2,е).
Координатные плоскости и системы координатных плоскостей, используемые при анализе режущих инструментов
1 – обрабатываемая поверхность,
2 — обработанная поверхность,
3 – поверхность резания – образуется на обрабатываемой детали непосредственно реж кромкой инструмента, и явл переходной между 1 и 2
Ps – рабочая плоскость, V – вектор скорости резания, Vs – вектор скорости движения подачи, Ve – вектор скорости результирующего движения.
Dг – главное движение, Ds – движение подачи, De – результирующее движение.