

Прикладные задачи имитационного моделирования
Ориентированный процесс случайного блуждания как метод прогнозирования
Применение аналитических и статистических моделей связано с априорным поиском структуры этих моделей чаще всего при ограниченной информации о характере развития процесса. Определение параметров статистической модели и оценка точности прогноза требуют к тому же наличия необходимых статистических данных, характеризующих поведение объекта на периоде основания прогноза. Указанные обстоятельства в первую очередь снижают достоверность выводов в задачах прогнозирования развития технических систем.
Для выполнения прогноза предлагается подход, не связанный I с использованием жесткой структуры модели и серьезными требованиями к объему априорной информации. Сущность метода заключается в представлении используемого для прогнозирования динамического ряда в качестве определенным образом ориентированного процесса случайного блуждания.
Значение изменяющегося параметра объекта прогнозирования для каждого момента на периоде основания можно представить в виде
![]()
![]() ,
,
где – значение динамического ряда в -тый момент времени (год) периода основания;
![]() –
значение
динамического ряда в предыдущий
момент времени;
–
значение
динамического ряда в предыдущий
момент времени;
![]() – приращение
переменной объекта прогнозирования
в
-тый
момент времени по сравнению с предыдущими;
– приращение
переменной объекта прогнозирования
в
-тый
момент времени по сравнению с предыдущими;
– число значений динамического ряда.
Поскольку приращения носят случайный характер, для них можно определить вид закона распределения и его параметры. При этом нужно учесть характер зависимости последующих приращений от предыдущих.
Предполагается, что в период упреждения характер изменения динамического ряда сохраняется. Тогда, используя характеристики приращений, метод статистических испытаний можно применить для моделирования приращений в период упреждения прогноза. Значение единичной реализации прогноза на каждом последующем шаге прогнозирования будет
![]()
![]() ,
,
где ![]() – номер шага на периоде упреждения;
– номер шага на периоде упреждения;
![]() – число шагов на
периоде упреждения;
– число шагов на
периоде упреждения;
![]() – значение
переменной объекта прогнозирования
на предыдущем шаге;
– значение
переменной объекта прогнозирования
на предыдущем шаге;
![]() – моделируемое
значение приращения на
-том
шаге.
– моделируемое
значение приращения на
-том
шаге.
Производя данную процедуру до момента прогнозирования, получим значение точечного прогноза
 ,
,
где ![]() – точечный прогноз на
-й
период упреждения;
– точечный прогноз на
-й
период упреждения;
![]() – конечное значение
динамического ряда.
– конечное значение
динамического ряда.
При разыгрывании данной процедуры многократно образуется совокупность случайных значений точечного прогноза. По полученной выборке значений определяются среднее значение прогноза и его дисперсия:
 ;
(2.4.1)
;
(2.4.1)
 ,
(2.4.2)
,
(2.4.2)
где – число реализаций точечного прогноза;
![]() – разыгрываемое
значение приращения на
-том
шаге периода упреждения в
-той
реализации точечного прогноза;
– разыгрываемое
значение приращения на
-том
шаге периода упреждения в
-той
реализации точечного прогноза;
![]() – значение
-той
реализации точечного прогноза,
определяемое по зависимости (2.4.1).
– значение
-той
реализации точечного прогноза,
определяемое по зависимости (2.4.1).
Таким образом, процедура прогнозирования сводится к многократной имитации приращений на периоде упреждения и последующему определению статистических характеристик (среднего и дисперсии) реализаций точечного прогноза. График предлагаемого метода показан на рис. 2.12.
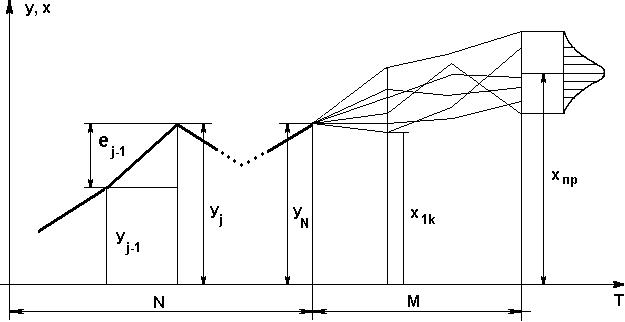
Рис. 2.12. Графическое отображение процесса случайного блуждания
Как видно из изложенного, процедура определения характеристик прогноза при предлагаемом подходе отличается простотой, но вместе с тем характеризуется некоторой громоздкостью, обусловленной применением метода статистических испытаний. Поэтому коренным вопросом является рациональное моделирование приращений.
При наличии динамических рядов, имеющих продолжительный период основания, позволяющий получить репрезентативную выборку приращений, моделирование можно осуществлять в соответствии с определенным по этой выборке эмпирическим законом распределения приращений.
Для коротких динамических рядов можно применить допущение о нормальности отклонений значений динамического ряда от тренда. При этом допущении плотность распределения приращений также является нормальной.
При наличии на периоде основания информации малого объема (короткие динамические ряды) для моделирования приращений целесообразно использовать двумерное нормальное распределение. Двумерная плотность
вероятности зависит в этом случае от пяти параметров:

 ,
,
где ![]() – случайные значения, математические
ожидания и среднеквадратические
отклонения предыдущих и последующих
приращений переменной объекта
прогнозирования соответственно;
– случайные значения, математические
ожидания и среднеквадратические
отклонения предыдущих и последующих
приращений переменной объекта
прогнозирования соответственно;
![]() – коэффициент
корреляции последующих приращений на
предыдущие.
– коэффициент
корреляции последующих приращений на
предыдущие.

Рис. 2.13. График определения предыдущих и последующих приращений
Графически определение предыдущих и последующих приращений показано на рис. 2.13.
Очевидно, что одно и то же приращение в зависимости от того, относительно какой точки оно рассматривается, может быть как предыдущим, так и последующим. Однако первое приращение является только предыдущим.
При обработке
исходного динамического ряда определяются
оценки математических ожиданий и
дисперсий предыдущих и последующих
приращений. Множество предыдущих
приращений
![]() определяется по зависимости
определяется по зависимости
![]() .
.
Множество последующих
приращений
![]() определяется по зависимости
определяется по зависимости
![]()
или
![]() .
.
По множеству
![]() определяются среднее значение
определяются среднее значение
![]() и оценка дисперсии
и оценка дисперсии
![]() предыдущих приращений:
предыдущих приращений:
 (2.4.3)
(2.4.3)
Соответственно,
по множеству
![]() определяются среднее значение
определяются среднее значение
![]() и оценки дисперсии
и оценки дисперсии
![]() последующих приращений:
последующих приращений:
 (2.4.4)
(2.4.4)
Оценка значения коэффициента корреляции определится по зависимости
 . (2.4.5)
. (2.4.5)
Для моделирования
случайных приращений на периоде
упреждения используется алгоритм
моделирования двумерного нормального
распределения. Для рассматриваемого
случая моделирующая зависимость
последующих приращений
![]() имеет вид
имеет вид
 (2.4.6)
(2.4.6)
При моделировании
случайного значения
на первом шаге в каждой
-той
реализации
предыдущее значение
![]() равно значению последнего приращения
на периоде основания
равно значению последнего приращения
на периоде основания
![]() ,то
есть
,то
есть
![]()
При моделировании приращений на следующих шагах периода упреждения
![]()
Оценка коэффициента корреляции, определяемая по выборкам малых объемов, является случайной. Плотность вероятности выборочного коэффициента корреляции имеет сложный вид. При принятом допущении о нормальности распределения приращений используется нормализующее преобразование Фишера.
Случайная величина
![]() распределена нормально с параметрами
распределена нормально с параметрами
 ; (2.4.7)
; (2.4.7)
 ,
,
где – значение выборочного коэффициента корреляции, определяемое по зависимости (2.4.5).
Моделируем значения как нормально распределенную случайную величину по зависимости
![]() , (2.4.8)
, (2.4.8)
где ![]() – нормированная нормально распределенная
случайная величина, моделируемая с
помощью алгоритма.
– нормированная нормально распределенная
случайная величина, моделируемая с
помощью алгоритма.
Осуществляя обратный по отношению к преобразованию Фишера переход, получим случайное значение коэффициента корреляции
 . (2.4.9)
. (2.4.9)

Рис. 2.14. Блок-схема алгоритма прогнозирования с использованием ориентированного процесса случайного блуждания
С учетом изложенного моделирование приращений на периоде упреждения включает выполнение следующих действий:
обращение к датчику нормированных нормально распределенных случайных чисел и получение ;
вычисление случайного значения
 по зависимостям (2.4.8) и (2.4.9);
по зависимостям (2.4.8) и (2.4.9);обращение к датчику равномерно распределенных случайных чисел и получение числа
 ;
;вычисление приращения по зависимости (2.4.6) при полученном в п.2 значении коэффициента корреляции , определенном в п.3 значении .
Многократно имитируя приращения и используя зависимости (2.4.1) и (2.4.2), вычисляются характеристики прогноза. Блок-схема алгоритма изображена на рис. 2.14.
К достоинствам рассмотренного метода прогнозирования относятся:
простота вычислительного алгоритма;
возможность использования при ограниченной на периоде основания информации (начиная с 7-9 значений динамического ряда);
простота оценивания точности прогноза (определения дисперсии).