

Регулирование частоты:
Асинхронные двигатели обычно применяются для электроприводов, которые работают с постоянной частотой вращения. Но иногда они применяются для регулируемых электроприводов. Рассмотрим возможные способы регулирования частоты вращения.
1. На практике иногда для регулирования частоты вращения асинхронного двигателя используется реостат в цепи ротора, имеющего обмотку, присоединенную к контактным кольцам.
Увеличение активного сопротивления
цепи ротора приводит к увеличению
скольжения и, следовательно, к уменьшению
частоты вращения двигателя, что видно
из кривых M = f(s)
при различных (![]() ),
представленных на рис.
3-60. Здесь при
),
представленных на рис.
3-60. Здесь при
![]() (соответствует
работе электропривода с подъемным
краном) точки пересечения кривой
(соответствует
работе электропривода с подъемным
краном) точки пересечения кривой
![]() с
указанными кривыми определяют скольжения
при различных значениях (
).
Регулирование здесь возможно в широких
пределах, причем плавность регулирования,
очевидно, зависит от числа ступеней
реостата.
с
указанными кривыми определяют скольжения
при различных значениях (
).
Регулирование здесь возможно в широких
пределах, причем плавность регулирования,
очевидно, зависит от числа ступеней
реостата.
Указанный способ регулирования неэкономичен, так как он связан с непроизводительной затратой энергии в реостате. Действительно, согласно (3-69) получаем:
![]() .
.
Отсюда видно, что увеличение скольжения
s при М = const
приводит к увеличению электрических
потерь в роторной цепи. Если, например,
s увеличивается при
М = const вследствие
введения в роторную цепь сопротивления
![]() от
0,02 до 0,5, что соответствует уменьшению
частоты вращения приблизительно вдвое,
то почти половина мощности Рэм
непроизводительно теряется в реостате.
от
0,02 до 0,5, что соответствует уменьшению
частоты вращения приблизительно вдвое,
то почти половина мощности Рэм
непроизводительно теряется в реостате.
При регулировании частоты вращения двигателя при помощи реостата в цепи ротора следует иметь в виду, что его механическая характеристика (рис. 3-67) может получиться резко падающей, недопустимой, например, для электропривода к токарному станку.

Рис. 3-67. Механические характеристики n2 = f (M) двигателя с контактными кольцами при сопротивлении = 0 и при >0.
Для целей регулирования не следует применять пусковые реостаты, так как они предназначаются для кратковременной нагрузки. Регулировочные реостаты должны иметь большие размеры, чтобы получилась достаточная поверхность охлаждения для рассеяния тепла, образующегося в реостате.
2. Частоту вращения асинхронного двигателя можно регулировать также путем изменения напряжения U1 на зажимах статора. Однако такой способ регулирования при малом сопротивлении роторной цепи позволяет изменять частоту вращения лишь в небольших пределах, что следует из рис. 3-68, где сплошные кривые представляют собой зависимости M = f(s)при различных напряжениях U1 и при rд = 0.

Рис. 3-68. Регулирование частоты вращения путем изменения напряжения U1.
Можно расширить пределы регулирования путем изменения U1, включив в роторную цепь добавочное сопротивление (пунктирные кривые на рис. 3-68).
Изменение напряжения U1 производится при помощи регулировочных трансформаторов, реактивных катушек с выдвижным сердечником, переменных активных сопротивлений, включенных в цепь статора, а также при помощи магнитных усилителей.
3. В относительно редких случаях регулирование частоты вращения осуществляется путем изменения частоты f1, тока, подводимого к двигателю.
При этом изменяется частота вращения поля , а следовательно, и ротора. Такой способ регулирования требует наличия отдельного генератора переменного тока с регулируемым первичным двигателем.
На практике применяется также способ ступенчатого изменения частоты вращения путем изменения числа пар полюсов обмотки статора. Соответствующее переключение обмотки производится сравнительно просто, если нужно увеличить или уменьшить число пар полюсов вдвое. В этом случае каждая фаза обмотки статора делится на две одинаковые части, которые можно включать последовательно или параллельно.
На рис. 3-69 показана принципиальная схема такой обмотки, из которой видно, что при последовательном соединении обеих половин фазы получается число полюсов, в 2 раза большее, чем при параллельном.
Рис. 3-69. Изменение числа пар полюсов обмотки статора в отношении 2 : 1.
При обмотке статора, переключаемой на различные числа пар полюсов, как правило, применяется короткозамкнутый ротор с беличьей клеткой. Если ротор выполняется с контактными кольцами, то его обмотка также должна переключаться на те же числа пар полюсов, что требует устройства большого количества контактных колец и удорожает двигатель.
Для получения большего числа ступеней скорости на статоре помещают обычно две обмотки, причем одна или каждая из них делается переключаемой на числа пар полюсов в отношении 2 : 1. В этом случае можно получить три или четыре ступени скорости, например:
3000 : 1500 : 1000
или
3000 : 1 500 : 1 000 : 500 об/мин.
Асинхронные двигатели с несколькими ступенями частоты вращения называются многоскоростными. Они применяются в электроприводах к вентиляторам и металлорежущим станкам, где позволяют упростить «коробку скоростей» или совсем от нее освободиться. Достоинством многоскоростного двигателя при применении его, например, для токарного станка является то, что при изменении момента нагрузки он работает на каждой ступени частоты вращения при незначительном ее изменении, как и обычный асинхронный двигатель.
Сказанное подтверждают механические характеристики n2 = f (M) многоскоростного двигателя, приведенные на рис. 3-70.

Рис. 3-70. Механические характеристики n2 = f (M) многоскоростного двигателя для двух ступеней скорости.
К недостаткам многоскоростных двигателей нужно отнести их увеличенные размеры по сравнению с нормальными двигателями и вследствие этого более высокую стоимость.
Другие способы регулирования частоты вращения асинхронного двигателя здесь не рассматриваются, так как они редко применяются на практике.
19
На рис. 4-84 представлены рабочие характеристики синхронного двигателя, полученные при постоянных напряжении и частоте сети и при постоянном возбуждении. По оси абсцисс здесь отложена полезная мощность Р2 (мощность на валу).
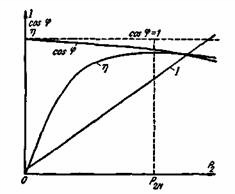
Рис. 4-84. Рабочие характеристики синхронного двигателя.
Если при холостом ходе установлен соs φ = 1, то при увеличении нагрузки он будет уменьшаться, что должно быть ясно из рассмотрения V-образных кривых двигателя (рис. 4-80) и их построения (рис. 4-79).
Подведенная мощность P1,
больше мощности на валу Р2 на
величину потерь в двигателе ∑P.
Коэффициент полезного действия
![]() в
зависимости от Р2 изображается
кривой, обычной для электрических машин.
в
зависимости от Р2 изображается
кривой, обычной для электрических машин.
На рис. 4-85 изображены кривые, показывающие, как изменяется cos φ с нагрузкой при различных значениях возбуждения. Кривая 1 аналогична кривой cos φ на рис. 4-84. Кривая 2относится к случаю, когда cos φ установлен равным единице при номинальной нагрузке. Эта кривая показывает, что cos φ при уменьшении нагрузки также уменьшается, но он будет соответствовать опережающему току, потребляемому двигателем из сети. Кривая 3 соответствует току возбуждения, который дает cos φ = l при Р2 = 0,5Р2н.

Рис. 4-85. Зависимость cos φ от нагрузки при различных возбуждениях.
Двигатели обычно рассчитываются для работы при номинальной нагрузке с cos φ = 0.9, соответствующим опережающему току. В этом случае машина будет служить не только в качестве двигателя, но и для улучшения cos φ всей электрической установки.
Применение нормальных синхронных двигателей только для улучшения cos φ (для работы в режиме компенсатора) в обычных случаях нецелесообразно, так как при такой работе и при допустимом (номинальном) токе возбуждения ток статора получается меньше номинального и, следовательно, машина не полностью используется.
Синхронные двигатели обычно выполняются с возбудителем, посаженным на один с ними вал. Поэтому при малых мощностях они менее выгодны, чем асинхронные двигатели. Но, начиная со 100 кВт, а при низких частотах вращения и с меньшей мощности, синхронные двигатели в ряде случаев следует предпочесть асинхронным двигателям. Применение в системах возбуждения полупроводниковых выпрямителей вместо машинных возбудителей позволяет получить достаточно экономичные синхронные двигатели и при сравнительно небольших мощностях.
Основное преимущества синхронного двигателя, как уже отмечалось, его высокий cosφ. Это преимущество приводит не только к повышению использования всей электрической установки, но и к уменьшению размеров синхронного двигателя по сравнению с асинхронным (при прочих равных условиях). Последнее объясняется тем, что размеры электрической машины определяются ее кажущейся мощностью, a не активной. Кажущаяся мощность синхронного двигателя при созφ = 1 меньше, чем асинхронного, в отношении 1 : cos φ. Это особенно заметно при сравнении тихоходных двигателей, так как cos φа тихоходного асинхронного двигателя имеет относительно небольшое значение.
Из других важных преимуществ синхронного двигателя отметим здесь возможность получить большой максимальный момент Мэм.м за счет увеличения воздушного зазора, так как при этом уменьшается синхронное сопротивление xd. Увеличение максимального вращающего момента асинхронного двигателя за счет увеличения воздушного зазора привело бы к значительному ухудшению его cos φ. К тому же максимальный вращающий момент синхронного двигателя зависит от напряжения в первой степени, тогда как тот же момент асинхронного двигателя пропорционален квадрату напряжения.