

003Ffh) і кінцеві (ffff0h-fffffh) адреси зарезервовані для системи
переривань та початкового встановлення відповідно.
У МП i8086 застосовано сегментну організацію пам'яті, яка
характеризується тим, що програмно доступною є не вся пам'ять, а лише
деякі сегменти, тобто області пам'яті. Усередині сегмента використовують
лінійну адресацію.
Рисунок 2 – Програмна модель пам'яті
Упровадження сегментної організації можна пояснити таким чином.
Мікропроцесор i8086 являє собою 16-розрядний процесор, тобто він має 16-
розрядну внутрішню шину, 16-розрядні регістри і суматори. Прагнення
розробників ВІС адресувати якомога більший масив пам'яті зумовило ви-
користання 20-розрядної шини даних.
Для формування 20-розрядної адреси у 16-розрядному процесорі вико-
ристовують інформацію двох 16-розрядних регістрів. У МП i8086 20-роз-
рядна адреса формується з двох 16-розрядних адрес, які називають логічними.
Перша логічна адреса, доповнена праворуч чотирма нулями, являє собою
початкову адресу сегмента ємністю 64 кбайт. Друга логічна адреса
визначає зміщення у сегменті, тобто відстань від початку сегмента до ад-
ресованої комірки. Якщо вона дорівнює 0000, то адресується перша комірка
сегмента, якщо FFFFH - то остання. Отже, логічний адресний простір
розподілено на блоки суміжних адрес розміром 64 кбайт, тобто сегменти.
Такий підхід до організації пам'яті зручний ще й тому, що пам'ять
логічно поділяється на області коду (програмної пам'яті), даних і стека.
Фізична 20-розрядна адреса комірки пам'яті формується з двох 16-розрядних
адрес – адреси сегмента Seg і виконавчої адреси ЕА (Executive Address), які
додаються зі зміщенням на чотири розряди (рисунок 3).
Рисунок 3 – Формування фізичної адреси
Зміщення адреси сегмента на 4 розряди ліворуч еквівалентне його мно-
женню на 24. Тоді фізична адреса дорівнює 16 х Seg + ЕА. Як перша логічна
адреса Seg використовується вміст одного із чотирьох сегментних регістрів:
CS (Code Segment - сегмент кодів), DS (Data Segment - сегмент даних), ES
(Extended Segment - додатковий сегмент даних), SS (Stack Segment - сегмент
стека). Друга логічна адреса ЕА або зміщення залежить від сегмента. Так, у
сегменті кодів як ЕА використовується вміст лічильника інструкцій IP, у сег-
ментах даних значення ЕА залежить від засобу адресації операнда, у сегменті
стека використовуються регістри SP або ВР.
Перетворення логічних адрес на фізичні завжди однозначне, тобто парі
Seg і ЕА відповідає єдина фізична адреса. Зворотне перетворення не є
однозначним: фізичну адресу можна подати за допомогою 4096 пар логічних
адрес. Фізична адреса позначається у вигляді Seg:EA, де як Seg і ЕА можуть
використовуватися і позначення регістрів, і 16-розрядні дані.
На рисунку 4 показано розміщення у просторі 1 Мбайт чотирьох сег-
ментів по 64 кбайт без перекриття. Початкові адреси сегментів визначаються
вмістом 16-розрядних сегментних регістрів, які доповнено праворуч чотирма
нульовими бітами. Зміщення в сегменті кодів визначається вмістом регістра
Ip; зміщення в сегменті даних і додатковому сегменті даних - ефективною
адресою ЕА, яка наводиться в команді; у сегменті стека - вмістом регістра
SP.
У сегментах кодів розміщено коди команд, тобто програму у машинних
кодах; у решті сегментів – дані. Програма може звертатися тільки до даних у
сегментах (рисунок 4).
Змінюючи вміст сегментних регістрів, можна пересувати сегменти в
межах усієї пам'яті 1 Мбайт.
Рисунок 4 – Розміщення сегментів у просторі пам'яті 1 Мбайт
Регістри загального призначення поділяються на регістри даних і ре-
гістри-вказівники. До регістрів даних відносять чотири 16-розрядні регістри:
АХ, ВХ, СХ, DX. Кожний із цих регістрів складається з двох 8-розрядних
регістрів, які можна незалежно адресувати за символічними іменами АН, ВН,
СН, DH (старші байти - High) та AL, BL, CL, DL (молодші байти -Low).
Регістри-вказівники SP (Stack Pointer - вказівник стека), ВР (Base Pointer -
базовий регістр), SI (Source Index - індекс джерела), DI (Destination Index -
індекс призначення) є 16-розрядними. Усі РЗП можна використати для
зберігання даних, але в деяких командах допускається використання певного
регістра за замовчуванням. На відміну від 8-розрядних МП регістр SP
зберігає зміщення останньої зайнятої комірки стека відносно початку
сегмента стека, а повна адреса стека визначається як SS:SP.
Сегментні регістри CS, DS, ES, SS визначають початкові адреси чотирьох
сегментів пам'яті. Використання сегментних регістрів визначається типом
звернення до пам'яті.
Типи керуючих автоматів
Залежно від способу зберігання мікропрограм розрізняють керуючі автомати: - З жорсткою логікою; - З гнучкою логікою. У керуючому автоматі з жорсткою логікою вся логіка переходів і вироблення керуючих сигналів визначається жорсткою структурою комбінаційної схеми. Перехід на іншу мікропрограму зажадає зміни комбінаційної схеми. Такий керуючий автомат має комбінаційну схему (КС), де "зашита" ДСА роботи обчислювача і регістр (R) станів автомата (мал. 4). Синхросигнал (С) подається на вхід синхронізації регістра R.
Малюнок 4 Такий автомат, у якого мікропрограми реалізовані апаратно у вигляді комбінаційної схеми, мають високу швидкодію, але не можуть бути перебудовані на іншу мікропрограму. У керуючих автоматах з гнучкою логікою мікропрограми зберігаються в пристрої. При цьому в одній комірці запам'ятовуючого пристрою зберігається одна мікрокоманда або мікрооперацій. Таким чином, завдання реалізації мікропрограми тут полягає в послідовному вилученні мікрокоманд з комірок пам'яті за лічильником мікрокоманд (СЧМК), що задає адреси комірок ЗУ (мал. 5).
Малюнок 5 Гнучкість такого автомата полягає в тому, що для реалізації іншої мікропрограми, тут достатньо її записати на місце колишньої. Структура УА зберігається незмінною, але швидкодія його нижче ніж у УА з жорсткою логікою. Різні способи зберігання мікропрограм у цих автоматів і викликає різний підхід до їх проектування.
Голова
фахової атестаційної
комісії Дудатьєв А.В.
БІЛЕТ № 15
Аналого-цифрові перетворювачі та їх параметри.
Фізична структура диска. Дати характеристику основних складових.
Основні характеристики середовища передавання даних на основі металевого дроту.
Синтезувати схему керуючого автомата для закодованої граф – схеми алгоритму:
побудувати граф автомата, таблиці переходів та виходів автомата;
визначити логічні вирази для функцій збудження елементів пам’яті та вихідних функцій;
реалізувати схему автомата в заданому базисі та побудувати часові діаграми для заданої вихідної функції.
Вихідні дані:
закодована ГСА;
тип елементів пам’яті;
базис;
вихідна функція для побудови часових діаграм.
АЦП, Ана́лого-цифрови́й перетво́рювач (англ. analog-to-digital converter (скорочено ADC)) — пристрій, що перетворює вхідний аналоговий сигнал в дискретний код (цифровий сигнал). Зворотне перетворення здійснюється за допомогою ЦАП (цифро-аналогового перетворювача).
Як правило, АЦП — електронний пристрій, що перетворює напругу в двійковий цифровий код. Проте, деякі неелектронні пристрої, такі як перетворювач кут-код, слід також відносити до АЦП.
[ред.] Розрядність
Розрядність АЦП характеризує кількість дискретних значень, які перетворювач може видати на виході. Вимірюється в бітах. Наприклад, АЦП, здатний видати 256 дискретних значень (0..255), має розрядність 8 бітів, оскільки
![]() .
.
Розрядність може бути також визначена в величинах вхідного сигналу і виражена, наприклад, в вольтах. Розрядність за напругою дорівнює напрузі, що відповідає максимальному вихідному коду, який ділиться на кількість вихідних дискретних значень. Наприклад:
Приклад 1
Діапазон вхідних значень = від 0 до 10 вольт
Розрядність АЦП 12 бітів: 212 = 4096 рівнів квантування
Розрядність за напругою: (10-0)/4096 = 0.00244 вольт = 2.44 мв
Приклад 2
Діапазон вхідних значень = від −10 до +10 вольт
Розрядність АЦП 14 бітів: 214 = 16384 рівнів квантування
Розрядність за напругою: (10-(-10))/16384 = 20/16384 = 0.00122 вольт = 1.22 мв
На практиці розрядність АЦП обмежена відношенням сигнал/шум вхідного сигналу. При великій інтенсивності шумів на вході АЦП розрізнення сусідніх рівнів вхідного сигналу стає неможливим, тобто погіршується розрядність. При цьому реальний досяжний дозвіл описується ефективною кількістю розрядів (effective number of bits — ENOB), яка менше, ніж реальна розрядність АЦП. При перетворенні сильно зашумленного сигналу молодші біти вихідного коду практично непридатні, оскільки містять шум. Для досягнення заявленої розрядності відношення С/Ш вхідного сигналу повинне бути приблизно 6 дб на кожен біт розрядності.
[ред.] Типи перетворення
[ред.] Лінійні АЦП
Більшість АЦП вважаються лінійними, хоча аналого-цифрове перетворення по суті є нелінійним процесом (оскільки операція перетворення безперервного простору в дискретне — операція необоротна і, отже, нелінійна). Термін лінійний стосовно АЦП означає, що діапазон вхідних значень, що відображається на вихідне цифрове значення, зв'язаний за лінійним законом з цим вихідним значенням, тобто вихідне значення k досягається при діапазоні вхідних значень від
m(k + b)
до
m(k + 1 + b)
де m і b — деякі константи. Константа b, як правило, має значення 0 або −0.5. Якщо b = 0, АЦП називають mid-rise, якщо ж b = −0.5, то АЦП називають mid-tread.
[ред.] Нелінійні АЦП
Якби густина ймовірності амплітуди вхідного сигналу мала рівномірний розподіл, те відношення сигнал/шум (стосовно шуму квантування) було б максимально можливим. З цієї причини зазвичай перед квантуванням за амплітудою сигнал пропускають через безінерційний перетворювач, передавальна функція якого повторює функцію розподілу самого сигналу. Це покращує достовірність передачі сигналу, оскільки найбільш важливі області амплітуди сигналу квантуються з кращою розрядністю. Відповідно, при цифро-аналоговому перетворенні потрібно буде обробити сигнал функцією, зворотній функції розподілу початкового сигналу.
Це той же принцип, що і використовуваний в компандерах, які застосовуються у магнітофонах і різних комунікаційних системах, він направлений на максимізацію ентропії.
Наприклад, голосовий сигнал має лапласовий розподіл амплітуди. Це означає, що близько нуля, амплітуда несе більше інформації, аніж в області з більшою амплітудою. З цієї причини логарифмічні АЦП часто застосовуються в системах передачі голосу для збільшення динамічного діапазону значень, що передаються без зміни якості передачі сигналу в області малих амплітуд.
8-бітові логарифмічні АЦП з а-законом або μ-законом забезпечують широкий динамічний діапазон і мають високий дозвіл в найбільш критичному діапазоні малих амплітуд; лінійний АЦП з подібною якістю передачі повинен був би мати розрядність близько 12 біт.
[ред.] Точність
Є декілька джерел похибки АЦП. Похибки квантування і (вважаючи, що АЦП повинен бути лінійним) нелінійності властиві будь-якому аналого-цифровому перетворенню. Крім того, існують так звані апартурні помилки які є наслідком джитера (англ. jitter) тактового генератора, вони виявляються при перетворенні сигналу в цілому (а не одного відліку).
Ці похибки вимірюються в одиницях, званих МЗР — молодший значущий розряд. У приведеному вище прикладі 8-бітового АЦП помилка в 1 МЗР складає 1/256 від повного діапазону сигналу, тобто 0.4 %.
[ред.] Похибки квантування
Докладніше: Шум квантизації
Похибки квантування є наслідком обмеженої розрядності АЦП. Цей недолік не може бути усунений при жодному типі аналого-цифрового перетворення. Абсолютна величина помилки квантування при кожному відліку знаходиться в межах від нуля до половини МЗР.
Як правило, амплітуда вхідного сигналу
значно більша, ніж МЗР. В цьому випадку
помилка
квантування не корельована
з сигналом і має рівномірний
розподіл. Її середньоквадратичне
значення збігається з
середньоквадратичним
відхиленням розподілу,
який дорівнює
![]() .
У разі 8-бітового АЦП це складе 0.113 %
від повного діапазону сигналу.
.
У разі 8-бітового АЦП це складе 0.113 %
від повного діапазону сигналу.
[ред.] Нелінійність
Усім АЦП властиві помилки, пов'язані з нелінійністю, які є наслідком фізичної недосконалості АЦП. Це призводить до того, що передавальна характеристика (у вказаному вище сенсі) відрізняється від лінійної (точніше від бажаної функції, оскільки вона не обов'язково лінійна). Помилки можуть бути зменшені шляхом калібрування.
Важливим параметром, що описує нелінійність, є інтегральна нелінійність (INL) і диференційна нелінійність (DNL).
[ред.] Апертурна похибка
Припустимо ми оцифровуємо синусоїдальний
сигнал
![]() .
В ідеальному випадку відліки беруться
через рівні проміжки часу. Проте, в
реальності час моменту узяття відліку
схильний до флуктуацій внаслідок
тремтіння фронту синхросигналу (clock
jitter). Вважаючи, що невизначеність моменту
часу взяття відліку порядку
.
В ідеальному випадку відліки беруться
через рівні проміжки часу. Проте, в
реальності час моменту узяття відліку
схильний до флуктуацій внаслідок
тремтіння фронту синхросигналу (clock
jitter). Вважаючи, що невизначеність моменту
часу взяття відліку порядку
![]() ,
отримуємо, що помилка, обумовлена цим
явищем, може бути оцінена як
,
отримуємо, що помилка, обумовлена цим
явищем, може бути оцінена як
![]()
Легко бачити, що помилка відносно невелика на низьких частотах, проте на великих частотах вона може істотно зрости. Ефект апертурної похибки може бути проігнорований, якщо її величина порівняно невелика в порівнянні з помилкою квантування. Таким чином, можна встановити такі вимоги до тремтіння фронту сигналу синхронізації:
![]()
де q — розрядність АЦП.
Розрядність АЦП |
Максимальна частота вхідного сигналу |
||||
44.1 кГц |
192 кГц |
1 МГц |
10 МГц |
100 МГц |
|
8 |
28.2 нс |
6.48 нс |
1.24 нс |
124 пс |
12.4 пс |
10 |
7.05 нс |
1.62 нс |
311 пс |
31.1 пс |
3.11 пс |
12 |
1.76 нс |
405 пс |
77.7 пс |
7.77 пс |
777 фс |
14 |
441 пс |
101 пс |
19.4 пс |
1.94 пс |
194 фс |
16 |
110 пс |
25.3 пс |
4.86 пс |
486 фс |
48.6 фс |
18 |
27.5 пс |
6.32 пс |
1.21 пс |
121 фс |
12.1 фс |
24 |
430 фс |
98.8 фс |
19.0 фс |
1.9 фс |
190 ас |
З цієї таблиці можна зробити висновок про доцільність застосування АЦП певної розрядності з урахуванням обмежень, що накладаються тремтінням фронту синхронізації (clock jitter). Наприклад, безглуздо використовувати прецизійний 24-бітовий АЦП для запису звуку, якщо в система розподілу синхросигналу не в змозі забезпечити ультрамалої невизначеності.
[ред.] Частота дискретизації
Аналоговий сигнал є безперервною функцією часу, в АЦП він перетвориться в послідовність цифрових значень. Отже, необхідно визначити частоту вибірки цифрових значень з аналогового сигналу. Частота, з якою проводяться цифрові значення, отримала назву частота дискретизації (Sampling rate) АЦП.
Безперервно змінний сигнал з обмеженою спектральною смугою піддається оцифровці (тобто значення сигналу вимірюються через інтервал часу T — період дискретизації) і початковий сигнал може бути точно відновлений з дискретних в часі значень шляхом інтерполяції. Точність відновлення обмежена помилкою квантування. Проте, відповідно до теореми Котельникова-Шеннона точне відновлення можливе тільки якщо частота дискретизації вища, ніж подвоєна максимальна частота в спектрі сигналу.
Оскільки реальні АЦП не можуть провести аналого-цифрове перетворення миттєво, вхідне аналогове значення повинне утримуватися постійним принаймні від початку до кінця процесу перетворення (цей інтервал часу називають час перетворення). Це завдання вирішується шляхом використання спеціальної схеми на вході АЦП — пристрій вибірки-зберігання (ПВЗ, рос. УВХ). ПВЗ, як правило, зберігає вхідну напругу в конденсаторі, сполученому з входом через аналоговий ключ: при замиканні ключа відбувається вибірка вхідного сигналу (конденсатор заряджає до вхідної напруги), при розмиканні — зберігання. Багато АЦП, виконані у вигляді інтегральних мікросхем містять вбудовані ПВЗ.
[ред.] Накладення спектрів (Аліасінг)
Всі ЦАП працюють шляхом вибірки вхідних значень через фіксовані інтервали часу. Отже, вихідні значення є неповною картиною того, що подається на вхід. Дивлячись на вихідні значення, немає ніякої можливості встановити, як поводився вхідний сигнал між вибірками. Якщо відомо, що вхідний сигнал міняється достатньо поволі щодо частоти дискретизації, то можна припустити, що проміжні значення між вибірками знаходяться десь між значеннями цих вибірок. Якщо ж вхідний сигнал міняється швидко, то ніяких припущень про проміжні значення вхідного сигналу зробити не можна, а отже, неможливо однозначно відновити форму початкового сигналу.
Якщо послідовність цифрових значень, видавана АЦП, де-небудь перетвориться назад в аналогову форму цифро-аналоговим перетворювачем, бажано, щоб отриманий аналоговий сигнал був максимально точною копією початкового сигналу. Якщо вхідний сигнал міняється швидше, ніж робляться його відліки, то точне відновлення сигналу неможливе, і на виході ЦАП буде присутній помилковий сигнал. Помилкові частотні компонетни сигналу (які відсутні у спектрі початкового сигналу) отримали назву alias (помилкова частота, побічна низькочастотна складова). Частота помилкових компонент залежить від різниці між частотою сигналу і частотою дискретизації. Наприклад, синусоїдальний сигнал з частотою 2 кГц, дискретизований з частотою 1.5 кгц був би відтворений як синусоїда з частотою 500 Гц. Ця проблема отримала назву накладення частот (aliasing).
Для запобігання накладенню спектрів сигнал, що подається на вхід АЦП, повинен бути пропущений через фільтр низьких частот для придушення спектральних компонент, частота яких перевищує половину частоти дискретизації. Цей фільтр отримав назву anti-aliasing (антіаліасинговий) фільтр, його застосування надзвичайне важливо при побудові реальних АЦП.
Хоча накладення спектрів в більшості випадків є небажаним ефектом, його можна використовувати на благо. Наприклад, завдяки цьому ефекту можна обійтися без перетворення частоти вниз при оцифровці вузькосмугового високочастотного сигналу (див. змішувач (радіотехніка)).
[ред.] Підмішування псевдовипадкового сигналу (dither)
Деякі характеристики АЦП можуть бути покращувані шляхом використання методики підмішування псевдовипадкового сигналу (т.зв. дитеринг, англ. dither). Вона полягає в додаванні до вхідного аналогового сигналу випадкового шуму (білий шум) невеликої амплітуди. Амплітуда шуму, як правило, вибирається на рівні половини МЗР. Ефект від такого додавання полягає в тому, що стан МЗР випадковим чином переходить між станами 0 і 1 при дуже малому вхідному сигналі (без додавання шуму МЗР був би в змозі 0 або 1 довготривало). Для сигналу з шумом, що підмішується, замість простого округлення сигналу до найближчого розряду відбувається випадкове округлення вгору або вниз, причому середній час, протягом якого сигнал закруглений до того або іншого рівня залежить від того, наскільки сигнал близький до цього рівня.
Таким чином, оцифрований сигнал містить інформацію про амплітуду сигналу з роздільною здатністю краще, ніж МЗР, тобто відбувається збільшення ефективної розрядності АЦП. Негативною стороною методики є збільшення шуму у вихідному сигналі. Фактично, помилка квантування розмивається по декількох сусідніх відліках. Такий підхід є бажанішим, ніж просте округлення до найближчого дискретного рівня. В результаті використання методики підмішування псевдовипадкового сигналу ми маємо більш точне відтворення сигналу в часі. Малі зміни сигналу можуть бути відновлені з псевдовипадкових стрибків МЗР шляхом фільтрації. Крім того, якщо шум детермінований (амплітуда шуму, що додається, точно відома у будь-який момент часу), то його можна відняти з оцифрованого сигналу, заздалегідь збільшивши його розрядність, тим самим майже повністю позбавитися від доданого шуму.
Звукові сигнали дуже малих амплітуд, оцифровані без псевдовипадкового сигналу, сприймаються на слух дуже спотвореними і неприємними. При підмішуваному псевдовипадковому сигналі дійсний рівень сигналу представлений середнім значенням декількох послідовних відліків.
Дуже схожий процес, також званий dither або дифузія помилок, застосовується для представлення півтонів зображень в комп'ютерній графіці при малій кількості бітів на піксел. При цьому зображення стає зашумленним, але візуально сприймається реалістичніше, ніж те саме зображення отримане простим квантуванням.
[ред.] Передискретизація
Як правило, сигнали оцифровуються з мінімально необхідною частотою дискретизації з міркувань економії, при цьому шум квантування є білим, тобто його спектральна щільність потужності рівномірно розподілена по всій смузі. Якщо ж оцифрувати сигнал з частотою дискретизації, набагато більшої, ніж за теоремою Котельникова-Шеннона, а потім піддати цифровій фільтрації для придушення спектру поза частотною смугою початкового сигналу, то відношення сигнал/шум, буде кращим, ніж при використанні всієї смуги. Таким чином можна досягти ефективної точності більшої, ніж розрядність АЦП.
Передискретизація також може бути використана для пом'якшення вимог до крутизни переходу від смуги пропускання до смуги пригнічення антіаліасингового фільтру. Для цього сигнал оцифровують, наприклад, на удвічі більшій частоті, потім проводять цифрову фільтрацію, пригнічуючи частотні компоненти поза смугою початкового сигналу, і, нарешті, знижують частоту дискретизації шляхом децимації.
[ред.] Типи АЦП
Нижче перераховані основні способи побудови електронних АЦП:
АЦП прямого перетворення або паралельний АЦП містить по одному компаратору на кожен дискретний рівень вхідного сигналу. У будь-який момент часу тільки компаратори, відповідні рівням нижче за рівень вхідного сигналу, видадуть на своєму виході сигнал перевищення. Сигнали зі всіх компараторів поступають на логічну схему яка видає цифровий код, залежний від того, скільки компараторів показали перевищення. Паралельні АЦП дуже швидкі, але зазвичай мають розрядність не більше 8 бітів (256 компараторів), оскільки, мають велику і дорогу схему. АЦП цього типу мають дуже великий розмір кристала мікросхеми, високу вхідну ємність, і можуть видавати короткочасні помилки на виході. Часто використовуються для відео або інших високочастотних сигналів.
АЦП послідовного наближення або АЦП з порозрядним врівноваженням містить компаратор, допоміжний ЦАП і регістр послідовного наближення. АЦП перетворить аналоговий сигнал в цифровий за N кроків, де N — розрядність АЦП. На кожному кроці визначається по одному біту шуканого цифрового значення, починаючи від СЗР і закінчуючи МЗР. Послідовність дій за визначенням чергового біта полягає в наступному. На допоміжному ЦАП виставляється аналогове значення, утворене з бітів, вже визначених на попередніх кроках; битий, який повинен бути визначений на цьому кроці, виставляється в 1, більш молодші біти встановлені в 0. Отримане на допоміжному ЦАП значення порівнюється з вхідним аналоговим значенням. Якщо значення вхідного сигналу більше значення на допоміжному ЦАП, то визначуваний біт отримує значення 1, інакше 0. Таким чином, визначення підсумкового цифрового значення нагадує двійковий пошук. АЦП цього типу володіють одночасно високою швидкістю і хорошою розрядністю.
АЦП диференціального кодування (англ. delta-encoded ADC) містять реверсивний лічильник, код з якого поступає на допоміжний ЦАП. Вхідний сигнал і сигнал з допоміжного ЦАП порівнюються на компараторі. Завдяки негативному зворотному зв'язку з компаратора на лічильник код на лічильнику постійно міняється так, щоб сигнал з допоміжного ЦАП якомога менше відрізнявся від вхідного сигналу. Після деякого часу різниця сигналів стає менше, ніж МЗР, при цьому код лічильника прочитується як вихідний цифровий сигнал АЦП. АЦП цього типу мають дуже великий діапазон вхідного сигналу і високу розрядність, але час перетворення залежить від вхідного сигналу, хоч і обмежено зверху. У гіршому разі час перетворення рівний Tmax=(2q) /fс, де q — розрядність АЦП, fс — частота тактового генератора лічильника. АЦП диференціального кодування зазвичай є хорошим вибором для оцифровки сигналів реального світу, оскільки більшість сигналів у фізичних системах не схильні до стрибкподібних змін. У деяких АЦП використовується комбінований підхід: диференційне кодування і послідовне наближення; це особливо добре працює у випадках, коли відомо, що високочастотні компоненти в сигналі відносно невеликі.
АЦП порівняння з зубчастим сигналом містять генератор напруги зубчастої форми, компаратор і лічильник часу. Зубчастий сигнал лінійно наростає до деякого рівня, потім швидко спадає до нуля. У момент початку наростання запускається лічильник часу. Коли пилоподібний сигнал досягає рівня вхідного сигналу, компаратор спрацьовує і зупиняє лічильник; значення прочитується з лічильника і подається на вихід АЦП. Даний тип АЦП є найпростішим за структурою і містить мінімальне число елементів. Разом з тим прості АЦП цього типу володіють досить низькою точністю і чутливі до температури і інших зовнішніх параметрів. Для збільшення точності генератор пилоподібного сигналу може бути побудований на основі лічильника і допоміжного ЦАП, проте така структура не має жодних переваг в порівнянні з АЦП послідовного наближення і АЦП диференціального кодування.
АЦП з урівноваженням заряду (до них відносяться АЦП з двостадійною інтеграцією, АЦП з багатостадійною інтеграцією і деякі інші) містять генератор стабільного струму, компаратор, інтегратор струму, тактовий генератор і лічильник. Перетворення відбувається в два етапи (двостадійне інтегрування). На першому етапі значення вхідного сигналу перетвориться в струм, який подається на інтегратор струму (заряд інтегратора спочатку рівний нулю); цей процес триває протягом часу TN, де T — період тактового генератора, N — константа (велике ціле число, визначає час накопичення заряду). Коли накопичення заряду закінчене, вхід інтегратора відключається від входу АЦП і підключається до генератора стабільного струму. Полярність генератора така, що він зменшує заряд, накопичений в інтеграторі. Процес розряду триває до тих пір, поки заряд в інтеграторі не зменшиться до нуля. Час розряду вимірюється шляхом рахунку тактових імпульсів від моменту початку розряду до досягнення нульового заряду на інтеграторі. Порахована кількість тактових імпульсів і буде вихідним кодом АЦП. Можна показати, що кількість імпульсів n, пораховане за час розряду, дорівнює: n=UвхN(RI0)−1, де Uвх — вхідна напруга АЦП, N — число імпульсів, етапу накопичення (визначено вище), R — опір резистора, що перетворює вхідну напругу в струм, I0 — струм генератора стабільного струму. Таким чином, потенційно нестабільні параметри системи (перш за все, місткість конденсатора інтегратора) не входять в підсумковий вираз. Це є наслідком двостадійності процесу: похибки, введені на першому і другому етапах взаємно віднімаються. Не пред'являються жорсткі вимоги навіть до довготривалої стабільності тактового генератора і напрузі зсуву компаратора. Фактично, принцип двостадійної інтеграції дозволяє перетворити відношення двох аналогових величин (вхідного і зразкового струму) у відношення числових кодів (n і N в термінах, визначених вище) практично без внесення додаткових помилок. Типова розрядність АЦП цього типу складає від 10 до 18 двійкових розрядів. Додатковою гідністю є можливість побудови перетворювачів, нечутливих до періодичних перешкод (наприклад, перешкода від мережевого живлення) завдяки точній інтеграції вхідного сигналу за фіксований часовий інтервал. Недоліком даного типа АЦП є низька швидкість перетворення. АЦП з урівноваженням заряду використовуються у вимірювальних приладах високої точності.
Конвеєрні АЦП використовують два або більше кроків-піддіапазонів. На першому кроці проводиться грубе перетворення (з низькою розрядністю). Далі визначається різниця між вхідним сигналом і аналоговим сигналом, відповідним результату грубого перетворення (з допоміжного ЦАП, на який подається грубий код). На другому кроці знайдена різниця піддається перетворенню, і отриманий код об'єднується з грубим кодом для набуття повного вигідного цифрового значення. АЦП цього типу швидкі, мають високу розрядність і невеликий розмір корпусу.
Сигма-Дельта АЦП (звані також Дельта-Сигма АЦП) проводить аналого-цифрове перетворення з частотою дискретизації, що у багато разів перевищує потрібну і шляхом фільтрації залишає в сигналі тільки потрібну спектральну смугу.
Неелектронні АЦП зазвичай будуються на тих же принципах.
Фізичний пристрій жорсткого диска
Чому ж його називають жорстким? Візьміть звичайну 3-х дюймову дискету. Якщо ви розкриє її корпус (бажано це проробляти над зіпсованою дискети не містить важливої інформації:), то ви побачите, що безпосередньо сам диск виконаний з гнучкого матеріалу. Може хто ще пам'ятає, що свого часу в ходу були 5-ти і 8-ми дюймові дискети. Корпус їх було виконано з нетривкого гнучкого матеріалу, на відміну від 3-х дюймових дискет, де корпус зроблений з пластику. Звідси і йде назва - "гнучкий диск". Жорсткий диск, як можна здогадатися виготовлений за зовсім іншу технологію. Основу його складає алюміній. Рідше використовується кераміка або скло, але диски на основі цього матеріалу досить дорогі і призначені для використання в дорогих моделях вінчестерів.
В перший моделях жорстких, як магнітного покриття використовувався матеріал на основі окису заліза. Зараз виробники використовують окис хрому, яка має велику зносостійкість.
Складається жорсткий диск з двох основних блоків. Перший - це механічний блок, що включає в себе безпосередньо самі диски, двигун обертання, блок магнітних головок і привод переміщення головок. Цей блок є герметичним і навіть з цікавості не рекомендується вивчати його пристрій на працюючому вінчестері:) В іншому випадку, ви втратите не тільки дані, але й сам пристрій. Другий блок - блок електроніки. Являє собою плату з напаяними елементами. На платі розташовані мікросхеми ОЗП (робоча пам'ять вінчестера), ПЗУ з керуючою програмою, DSP (цифровий сигнальний процесор) для обробки сигналів і основний керуючий процесор.
На мій погляд, сам термін "жорсткий диск" є кілька неправильним. Сьогодні тільки вінчестери з найменшим випускаються об'ємом відповідають цьому терміну. Справа в тому, що в вінчестерах з великим об'ємом використовуються декілька пластин об'єднаних в один блок. Приклад: Quantum Fireball 4,3 Gb LT - використовує один диск, а та сама модель, але обсягом 8,4 Gb вже два диски. Саме тому ви ніколи не зможете зустріти у цієї моделі обсяг у 5,1 чи 3,2 Gb. Звідси випливає, що чим більший об'єм вінчестера, тим більше кількість дисків там використовується.
Фактично все це виглядає наступним чином. Уявіть собі шпиндель на який на однаковій відстані один від одного насаджені диски. З кожного боку диска розташовані магнітні головки здійснюють читання і запис даних (запис інформації виконується на обидві сторони диска). Головки укріплені на спеціальних власниках, і переміщаються між центром і краєм диска. Під час роботи, голівки за рахунок своєї конструкції, "плавають" над поверхнею диска. При падінні швидкості обертання нижче норми або виключення живлення, процесор вінчестера відводить їх ближче до шпинделя, у так звану "паркувальну зону ", де головки лягають на поверхню диска. Запис інформації в цій зоні не проводиться. Попередня парковка необхідна для збереження головок і поверхні дисків, інакше при зіткненні головки з поверхнею диска на такій швидкості буде виведена з ладу робоча поверхня диска і сама головка.
Під час роботи вінчестера, швидкість обертання шпинделя дуже високою (в сучасних моделях це 5400, 7200 і 10000 об/хв), а відстань між поверхнею диска і головкою складає від одиниць до декількох часток мікрона. Тому блок дисків і робиться герметичним. При попаданні пилу між головкою і диском можливий збій в роботі, а найімовірніше і вихід з ладу вінчестера.
Логічна структура вінчестера така. Кожен диск ділитися на сектори і доріжки. Думаю, пояснювати що таке сектор не треба - згадайте хоча б геометрію:) А доріжки являють собою концентричні кола, уздовж яких розміщується інформація. Доріжки з однаковими номерами з двох сторін диска і в усьому пакеті дисків називаються циліндром. Ці три параметри необхідні для правильної установки вінчестера в BIOS'е комп'ютера. Зараз це особливої складності не викликає, тому що будь-який сучасний BIOS має функцію автодетектірованія параметрів вінчестера.
Також на диску існує так званий "інженерний циліндр". У ньому зберігається службова інформація (серійний номер, модель, в деяких моделях частина програми ПЗУ тощо). Раніше вінчестери виготовлялися "чистими", як і дискети. Тобто початкове форматування було покладено кінцевим споживача. Зараз ця операція проводиться безпосередньо на стадії виготовлення. Тому, якщо ви виявите в вашому BIOS або який-небудь утиліті пункт low level format HDD, ні в якому разі не користуйтеся їм! При форматуванні в заводських умовах, на диск записується спеціальна інформація (сервоінформація). Це спеціальні мітки, необхідні для пошуку секторів, відстеження положення головок і стабілізації частоти обертання диска. На сучасних вінчестерах ці мітки наносяться між секторами, а в більш ранніх моделях для них була призначена окрема поверхню пакету дисків. Сервоінформація є основою розмітки диску, при її псування контролер вінчестера не зможе відновити її самостійно!
Навіть при рівні сучасних технологій, будь-який новий вінчестер містить несправні блоки (bad block). Несправний блок (чи сектор) не дозволяє зчитувати з нього записану раніше інформацію. При початковій розмітці, виявлені дефектні блоки заносяться в спеціальну таблицю перепризначення. Далі контролер вінчестера, при роботі, підміняє їх на резервні, які спеціально залишаються для цих цілей.
Сама робота вінчестера, у загальних рисах виглядає наступним чином. При включенні живлення, процесор вінчестера спочатку тестує електроніку, після цього дає команду на включення двигуна шпинделя. Після досягнення критичної швидкості обертання, повітря захоплюємося поверхнями дисків змушує головки "спливати" над поверхнею диска. І весь час роботи вінчестера головки висять над поверхнею на повітряній подушці.
За досягненні швидкості обертання близькою до номінальної, головки виводяться з паркувальної зони і контролер вінчестера здійснює пошук сервометок, для стабілізації частоти обертання. Далі проводиться пошук різної службової інформації, наприклад таблиці перепризначення несправних ділянок. Останньою стадією ініціалізації жорсткого диска є перевірка позиціонування головок. Перевіряється це установкою головок на заздалегідь задану послідовність записів. Якщо все це так само проходять успішно, контролер видає сигнал готовності і переходить в режим нормальної роботи.
Характеристики ліній зв'язку. До основних характеристик ліній зв'язку відносяться:
- амплітудно-частотна характеристика;
- смуга пропускання;
- загасання;
- перешкодостійкість;
- перехресні наведення на ближньому кінці лінії;
- пропускна спроможність;
- достовірність передачі даних;
- питома вартість.
В першу чергу розробника обчислювальної мережі цікавлять пропускна спроможність і достовірність передачі даних, оскільки ці характеристики прямо впливають на продуктивність і надійність створюваної мережі. Пропускна спроможність і достовірність - це характеристики як лінії зв'язку, так і способу передачі даних. Тому якщо спосіб передачі (протокол) вже визначений, то відомі і ці характеристики. Наприклад, пропускна спроможність цифрової лінії завжди відома, оскільки на ній визначений протокол фізичного рівня, який задає бітову швидкість передачі даних, - 64 Кбіт/с, 2 Мбіт/с і тому подібне
Проте не можна говорити про пропускну спроможність лінії зв'язку, до того як для неї визначений протокол фізичного рівня. Саме у таких випадках, коли тільки належить визначити, якою з безлічі існуючих протоколів можна використовувати на даній лінії, дуже важливими є решта характеристик лінії, такі як смуга пропускання, перехресні наведення, перешкодостійкість і інші характеристики.
Для визначення характеристик лінії зв'язку часто використовують аналіз її реакцій на деякі еталонні дії. Такий підхід дозволяє досить просто і однотипно визначати характеристики ліній зв'язку будь-якої природи, не удаючись до складних теоретичних досліджень. Найчастіше як еталонні сигнали для дослідження реакцій ліній зв'язку використовуються синусоїдальні сигнали різних частот. Це пов'язано з тим, що сигнали цього типу часто зустрічаються в техніці і з їх допомогою можна представити будь-яку функцію часу - як безперервний процес коливань звуку, так і прямокутні імпульси, що генеруються комп'ютером.
Ступінь спотворення синусоїдальних сигналів лініями зв'язку оцінюється за допомогою таких характеристик, як амплітудно-частотна характеристика, смуга пропускання і загасання на певній частоті.
Амплітудно-частотна характеристика (рис. 2) показує, як затухає амплітуда синусоїди на виході лінії зв'язку в порівнянні з амплітудою на її вході для всіх можливих частот передаваного сигналу. Замість амплітуди в цій характеристиці часто використовують також такий параметр сигналу, як його потужність.
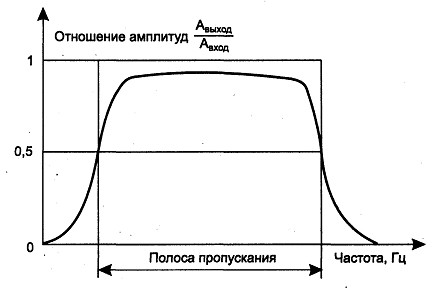
Рисунок 2 - Амплітудно-частотна характеристика
знання амплітудно-частотної характеристики реальної лінії дозволяє визначити форму вихідного сигналу практично для будь-якого вхідного сигналу. Для цього необхідно знайти спектр вхідного сигналу, перетворити амплітуду складових його гармонік відповідно до амплітудно-частотної характеристики, а потім знайти форму вихідного сигналу, склавши перетворені гармоніки.
Смуга пропускання (bandwidth) - це безперервний діапазон частот, для якого відношення амплітуди вихідного сигналу до вхідного перевищує деяку заздалегідь задану межу, зазвичай 0,5. Тобто смуга пропускання визначає діапазон частот синусоїдального сигналу, при яких цей сигнал передається по лінії зв'язку без значних спотворень. Знання смуги пропускання дозволяє отримати з деякою мірою наближення той самий результат, що і знання амплітудно-частотної характеристики. Як ми побачимо нижче, ширина смуги пропускання найбільшою мірою впливає на максимально можливу швидкість передачі інформації по лінії зв'язку. Саме цей факт знайшов віддзеркалення в англійському еквіваленті даного терміну (width - ширина).
Загасання (attenuation) визначається як відносне зменшення амплітуди або потужності сигналу при передачі по лінії сигналу певної частоти. Таким чином, загасання є однією крапкою з амплітудно-частотної характеристики лінії. Часто при експлуатації лінії заздалегідь відома основна частота передаваного сигналу, тобто та частота, гармоніка якої має найбільшу амплітуду і потужність. Тому достатньо знати загасання на цій частоті, щоб приблизно оцінити спотворення передаваних по лінії сигналів. Точніші оцінки можливі при знанні загасання на декількох частотах, відповідних декільком основним гармонікам передаваного сигналу.
Загасання А зазвичай вимірюється в децибелах (дБ, decibel - dB) і обчислюється за наступною формулою:
![]() ,
,
де
![]() -
потужність сигналу на виході лінії
-
потужність сигналу на виході лінії
![]() -
потужність сигналу на вході лінії.
-
потужність сигналу на вході лінії.
Оскільки потужність вихідного сигналу кабелю без проміжних підсилювачів завжди менша, ніж потужність вхідного сигналу, загасання кабелю завжди є негативною величиною.
Наприклад, кабель на витій парі категорії 5 характеризується загасанням не нижче -23,6 дБ для частоти 100 МГц при довжині кабелю 100 м. Частота 100 МГц вибрана тому, що кабель цієї категорії призначений для високошвидкісної передачі даних, сигнали яких мають значущі гармоніки з частотою приблизно 100 МГц. Кабель категорії 3 призначений для низькошвидкісної передачі даних, тому для нього визначається загасання на частоті 10 МГц (не нижче -11,5 дБ). Часто оперують з абсолютними значеннями загасання, без вказівки знаку.
Таким чином, амплітудно-частотна характеристика, смуга пропускання і загасання є універсальними характеристиками, і їх знання дозволяє зробити висновок про те, як через лінію зв'язку передаватимуться сигнали будь-якої форми.
Смуга пропускання залежить від типу лінії і її протяжності. На рисунку 3 показані смуги пропускання ліній зв'язку різних типів, а також найбільш часто використовувані в техніці зв'язки частотні діапазони.
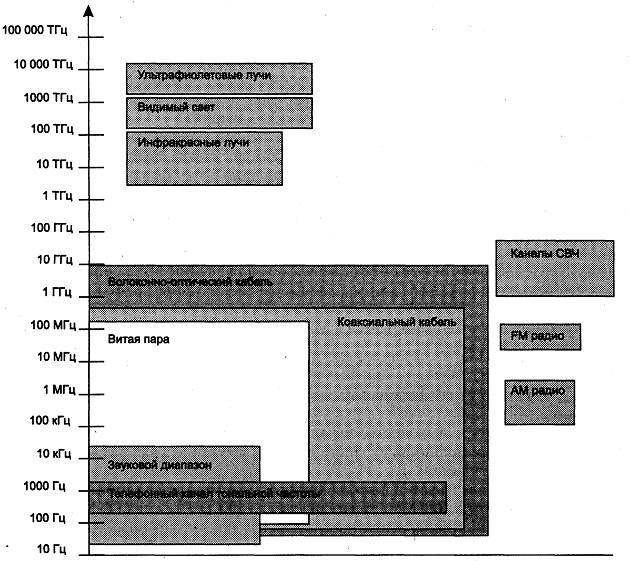
Рисунок 3 - Смуги пропускання ліній зв'язку і популярні частотні діапазони
Діапазони часто використовувані різними каналами зв'язку показані на рисунку 4.
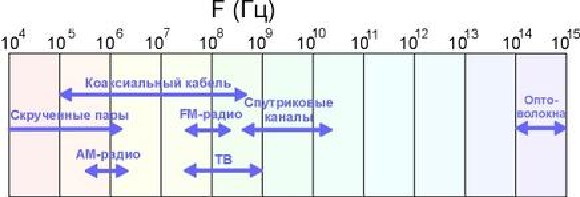
Рисунок 4 - Діапазони частот різних телекомунікаційних каналів
Пропускна спроможність лінії (throughput) характеризує максимально можливу швидкість передачі даних по лінії зв'язку. Пропускна спроможність вимірюється в бітах в секунду - бит/с, а також в похідних одиницях, таких як кілобіт в секунду (Кбіт/с), мегабіт в секунду (Мбіт/с), гигабит в секунду (Гбіт/с) і так далі.
Пропускна спроможність лінії зв'язку залежить не тільки від її характеристик, таких як амплітудно-частотна характеристика, але і від спектру пересланих сигналів. Якщо значущі гармоніки сигналу (тобто ті гармоніки, амплітуди яких вносять основний внесок до результуючого сигналу) потрапляють в смугу пропускання лінії, то такий сигнал добре передаватиметься даною лінією зв'язки і приймач зможе правильно розпізнати інформацію, відправлену по лінії передавачем. Якщо ж значущі гармоніки виходять за межі смуги пропускання лінії зв'язку, то сигнал значно спотворюватиметься, приймач помилятиметься при розпізнаванні інформації, а значить, інформація не зможе передаватися із заданою пропускною спроможністю.
Вибір способу представлення дискретної інформації у вигляді сигналів, що подаються на лінію зв'язку, називається фізичним або лінійним кодуванням. Від вибраного способу кодування залежить спектр сигналів і, відповідно, пропускна спроможність лінії. Таким чином, для одного способу кодування лінія може володіти однією пропускною спроможністю, а для іншого - іншою. Наприклад, вита пара категорії 3 може передавати дані з пропускною спроможністю 10 Мбіт/с при способі кодування стандарту фізичного рівня 10Base-T і 33 Мбіт/с при способі кодування стандарту 100Base-T4.
Зв'язок між смугою пропускання лінії і її максимально можливою пропускною спроможністю, незалежно від прийнятого способу фізичного кодування, встановив Клод Шеннон:
![]() ,
,
де
![]() -
максимальна пропускна спроможність
лінії в бітах в секунду
-
максимальна пропускна спроможність
лінії в бітах в секунду
![]() -
ширина смуги пропускання лінії в герцах
-
ширина смуги пропускання лінії в герцах
![]() -
потужність сигналу
-
потужність сигналу
![]() -
потужність шуму.
-
потужність шуму.
З цього співвідношення видно, що хоча теоретичної межі пропускної спроможності лінії з фіксованою смугою пропускання не існує, на практиці така межа є. Дійсно, підвищити пропускну спроможність лінії можна за рахунок збільшення потужності передавача або ж зменшення потужності шуму (перешкод) на лінії зв'язку. Обидві складові піддаються зміні насилу. Підвищення потужності передавача веде до значного збільшення його габаритів і вартості. Зниження рівня шуму вимагає застосування спеціальних кабелів з хорошими захисними екранами, що вельми дорого, а також зниження шуму в передавачі і проміжній апаратурі, чого досягти вельми не просто. До того ж вплив потужностей корисного сигналу і шуму на пропускну спроможність обмежений логарифмічною залежністю, яка росте далеко не так швидко, як прямо-пропорційна. Так, при достатньо типовому початковому відношенні потужності сигналу до потужності шуму в 100 разів підвищення потужності передавача в 2 рази дасть тільки 15 % збільшення пропускної спроможності лінії.
Близьким по суті до формули Шенона є наступне співвідношення, отримане Найквістом, яке також визначає максимально можливу пропускну спроможність лінії зв'язку, але без урахування шуму на лінії:
![]() ,
,
де ![]() -
кількість помітних станів інформаційного
параметра.
-
кількість помітних станів інформаційного
параметра.
Якщо сигнал має 2 помітних стани, то пропускна спроможність дорівнює подвоєному значенню ширини смуги пропускання лінії зв'язку (рис. 5, а). Якщо ж передавач використовує більш ніж 2 стійких стани сигналу для кодування даних, то пропускна спроможність лінії підвищується, оскільки за один такт роботи передавач передає декілька біт початкових даних, наприклад 2 бита за наявності чотирьох помітних станів сигналу (рис. 5, б).
Хоча формула Найквіста явно не враховує наявність шуму, побічно її вплив відбивається у виборі кількості станів інформаційного сигналу. Для підвищення пропускної спроможності каналу хотілося б збільшити цю кількість до значних величин, але на практиці ми не можемо цього зробити із-за шуму на лінії. Наприклад, для прикладу, приведеного на рис. 5, можна збільшити пропускну спроможність лінії в два рази, використавши для кодування даних не 4, а 16 рівнів. Проте якщо амплітуда шуму часто перевищує різницю між сусідніми 16-ю рівнями, то приймач не зможе стійко розпізнавати передавані дані. Тому кількість можливих станів сигналу фактично обмежується співвідношенням потужності сигналу і шуму, а формула Найквіста визначає граничну швидкість передачі даних у тому випадку, коли кількість станів вже вибрана з урахуванням можливостей стійкого розпізнавання приймачем.
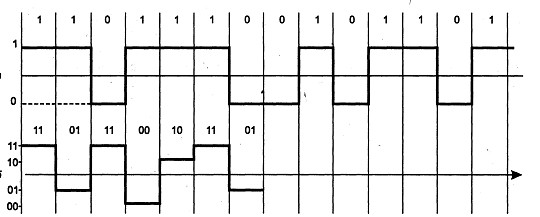
Рисунок 5 - Підвищення швидкості передачі за рахунок додаткових станів сигналу
Приведені співвідношення дають граничне значення пропускної спроможності лінії, а ступінь наближення до цієї межі залежить від конкретних методів фізичного кодування.
Перешкодостійкість лінії визначає її здатність зменшувати рівень перешкод, що створюються в зовнішньому середовищі, на внутрішніх провідниках. Перешкодостійкість лінії залежить від типу використовуваного фізичного середовища, а також від екрануючих і пригнічуючих перешкоди засобів самої лінії. Найменш перешкодостійкими є радіолінії, хорошою стійкістю володіють кабельні лінії і відмінною - волоконно-оптичні лінії, малочутливі до зовнішнього електромагнітного випромінювання. Зазвичай для зменшення перешкод, що з'являються із-за зовнішніх електромагнітних полів, провідники екранують і/або скручують.
Перехресні наведення на ближньому кінці
(Near End Cross Talk - NEXT) визначають перешкодостійкість
кабелю до внутрішніх джерел перешкод,
коли електромагнітне поле сигналу,
передаваного виходом передавача по
одній парі провідників, наводить на
іншу пару провідників сигнал перешкоди.
Якщо до другої пари буде підключений
приймач, то він може прийняти наведену
внутрішню перешкоду за корисний сигнал.
Показник NEXT, виражений в децибелах,
рівний
![]() де
-
потужність вихідного сигналу
де
-
потужність вихідного сигналу
![]() -
потужність наведеного сигналу.
-
потужність наведеного сигналу.
Чим менше значення NEXT, тим краще кабель. Так, для витої пари категорії 5 показник NEXT повинен бути менше -27 дБ на частоті 100 МГц.
Показник NEXT зазвичай використовується стосовно кабелю, що складається з декількох витих пар, оскільки в цьому випадку взаємні наведення однієї пари на іншу можуть досягати значних величин. Для одинарного коаксіального кабелю (тобто що складається з однієї екранованої жили) цей показник не має сенсу, а для подвійного коаксіального кабелю він також не застосовується унаслідок високого ступеня захищеності кожної жили. Оптичні волокна також не створюють скільки-небудь помітних перешкод один для одного.
Достовірність передачі даних характеризує
вірогідність спотворення для кожного
передаваного біта даних. Іноді цей же
показник називають інтенсивністю
бітових помилок (Bit Error Rate, BER). Величина
BER для каналів зв'язку без додаткових
засобів захисту від помилок (наприклад,
код, що самокорректирующихся, або
протоколів з повторною передачею
спотворених кадрів) складає, як правило
![]() -
-
![]() у
оптоволоконних лініях зв'язку -
у
оптоволоконних лініях зв'язку -
![]() .
Значення достовірності передачі даних,
наприклад, в
говорить
про те, що в середньому з 10 000 біт
спотворюється значення одного біта.
.
Значення достовірності передачі даних,
наприклад, в
говорить
про те, що в середньому з 10 000 біт
спотворюється значення одного біта.
Спотворення біт відбуваються як із-за наявності перешкод на лінії, так і унаслідок спотворень форми сигналу обмеженою смугою пропускання лінії. Тому для підвищення достовірності передаваних даних потрібно підвищувати ступінь перешкодозахисної лінії, знижувати рівень перехресних наведень в кабелі, а також використовувати більш широкосмугові лінії зв'язку.
Білет № 15
|
|
|
|
|
|
|
- |
|
|
|
0 |
0 |
1 |
|
|
|
|
0 |
1 |
0 |
|
|
|
|
0 |
1 |
1 |
|
|
|
|
0 |
1 |
0 |
|
|
|
|
0 |
1 |
1 |
|
|
|
|
1 |
0 |
1 |
|
|
|
|
1 |
1 |
0 |
|
|
|
|
1 |
0 |
0 |
|
|
|
|
1 |
0 |
1 |
|
|
|
|
1 |
1 |
0 |
- |
|
|
|
1 |
1 |
0 |
- |
|
|
|
1 |
1 |
0 |
- |
|
|
- |
0 |
0 |
0 |





























 ;
;


 ;
;  ;
;  ;
;
 ;
;  .
.
ВІННИЦЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ
«Затверджую»
Ректор В. В. Грабко
«___» _____________ 2012 р.
Фахове вступне випробування
для випускників технікумів на здобуття освітньо – кваліфікаційного рівня бакалавра з напряму 6.050102 – «Комп’ютерна інженерія»
БІЛЕТ № 16
Елементи індикації мікропроцесорної системи.
Побудувати функціональну схему цифрової клавіатури. Пояснити завдяки яким системним особливостям забезпечується багатомовність при введені даних в ПК.
Поняття про переривання. Основні види та механізми обробки переривань. Пріоритети переривань.
Скласти програму для обчислення заданого арифметичного виразу мовою Асемблер. Введення та виведення даних організувати в програмі мовою С++. Використати програмний пакет Visual Studio C++ 2008. Складену програму виконати на комп’ютері і перевірити правильність результату.
Голова
фахової атестаційної
комісії Дудатьєв А.В.
ВІННИЦЬКИЙ НАЦІОНАЛЬНИЙ ТЕХНІЧНИЙ УНІВЕРСИТЕТ
«Затверджую»
Ректор В. В. Грабко
«___» _____________ 2012 р.
Фахове вступне випробування
для випускників технікумів на здобуття освітньо – кваліфікаційного рівня бакалавра з напряму 6.050102 – «Комп’ютерна інженерія»
БІЛЕТ № 17
Структурна реалізація комутаторів локальних мереж.
Виконавчі пристрої мікропроцесорної системи.
Дайте характеристику складу операційних систем Windows.