

Тема 3. Принятие решений в условиях определенности
Тема 3. Принятие решений в условиях определенности 1
3.1. Однокритериальные задачи 1
3.2. Многокритериальные задачи принятия решений 4
3.2.1. Построение интегральных критериев 4
3.2.3. Комментарий Е.С.Вентцель [1] 11
3.2.4. Парето оптимальные решения 12
3.3. Методы нахождения множества Парето 15
3.4.Подход исследования операций 19
3.5.Обсуждение многокритериальности 20
3.6.Человекомашинные процедуры 21
3.6.1.Классификация ЧМП 21
3.6.2.Прямые человекомашинные процедуры 22
3.6.3.Процедуры оценки векторов 22
3.6.4.Процедуры поиска удовлетворительных значений критериев 23
3.6.5.Исследование решений на множестве Парето 24
Библиографический список 25
3.1. Однокритериальные задачи
Рассмотрим вначале несколько примеров математических задач, подходя к ним как к задачам принятия решений.
Пример 3-1 (классический анализ). Чтобы попасть из пункта A в пункт В, экипаж должен проехать вначале по лугу, а затем по прямолинейному шоссе (рис. 3). Известно расстояние от А до шоссе и известны скорости экипажа по лугу и по шоссе. В каком месте экипажу надо выехать на шоссе, чтобы время переезда из A в В было минимальным?
Рис.3-1.
Схема к примеру 3-1.
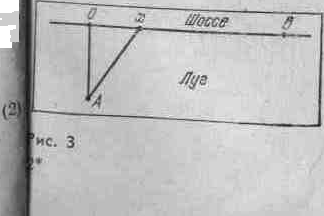
Сформулированную задачу можно рассматривать как задачу принятия решения: множество альтернатив состоит из множества точек прямой 0В (или из множества действительных чисел, если ввести ось х, как показано на рис.3-1). Каждой точке х соответствует исход -- маршрут АхВ.. Каждый исход (т.е. маршрут) оценивается числом — временем поездки по этому маршруту. Таким образом, имеем задачу принятия решения в условиях определенности.
Пример 3-2 (линейное программирование). Имеется m пунктов А1,…,Am производства некоторого продукта и k пунктов B1,…,Bk потребления этого продукта. Количество данного продукта в пункте Ai равно ai, а потребность в нем в пункте Вj равна bj (i=1, ..., m; j=1, ..., k). Стоимость перевозки единицы продукта из Ai в Bj равна cij. Как следует спланировать перевозки, чтобы: а) вывезти весь продукт из пунктов производства, б) удовлетворить потребности пунктов потребления, и чтобы суммарная стоимость перевозок была наименьшей (стоимость перевозки продукта пропорциональна его количеству)?
Спланировать перевозки — это значит, для каждого пункта производства Аi и каждого пункта потребления Bj указать, какое количество продукта должно быть перевезено из Ai в Bj. Обозначим это количество через xij.
Условия а) и б) означают тогда соответственно
![]()
![]() .
.
Кроме того xij
0. Общая стоимость
перевозок равна
![]() .
.
Данную задачу можно рассматривать как задачу принятия решения в условиях определенности, в которой в качестве альтернатив выступают неотрицательные mk-матрицы (xij) удовлетворяющие условиям (а) и (б). Каждой такой матрице соответствует исход – план перевозок, при котором из Ai в Bj перевозится xij единиц продукта. Целевая функция есть функция u.
Пример 3-3 (динамическое программирование). Рассмотрим граф (рис. 3-3), каждой дуге (х, у) которого приписано положительное число с(х, у). Можно считать, например, что граф представляет собой схему дорог, а с(х, у) – длина пути из х в у. Требуется найти путь из вершины a0 в одну из окончательных вершин (т. е. а8 или a9), имеющий наименьшую общую длину.
Здесь, в отличие от предыдущих двух примеров, мы имеем многошаговую задачу принятия решения. Действительно, принять решение о выборе пути — значит вначале выбрать первый шаг (т. е. какую-либо дугу, исходящую из а0); если, например, мы выбрали (а0, а2), то дальше надо производить выбор дуги, исходящей из a2 и т. д. (разумеется, если из вершины исходит только одна дуга, то выбор тривиален). Иногда удобнее (как с теоретической, так и с практической точки зрения) представить решение не как последовательный выбор вершин, а таким образом, что в каждой вершине графа выбирается одна из исходящих из нее дуг (например, такое представление решения естественно, если мы не знаем заранее, из какой вершины нам предстоит начать движение). Тогда выбор альтернативы состоит практически в том, что в каждой вершине графа отмечается одна из исходящих из нее дуг. Каждой такой сложной альтернативе соответствует единственный путь из начальной вершины — путь по отмеченным дугам; таким образом, усложнив понятие альтернативы, мы снова приходим к задаче принятия решения в условиях определенности и с численной оценкой исходов.
Рис.3-2. Схема дорог
к примеру 3-3.

При всем различии приведенных выше примеров в них прослеживается одна и та же схема: каждой альтернативе соответствует определенный исход, а «полезность» каждого исхода оценивается некоторым числом. Нас здесь интересуют именно численные оценки исходов, поэтому можно установить прямую связь: альтернатива — численное значение соответствующего ей исхода, минуя сами исходы. В итоге получим целевую функцию f, которая определена теперь на множестве альтернатив. Так как цель состоит здесь в получении исхода, имеющего возможно большее (или возможно меньшее) численное значение, то под оптимальным решением естественно понимать ту альтернативу, которая доставляет целевой функции f наибольшее (или наименьшее) значение.
Таким образом, можно сделать следующий вывод: математической моделью задачи принятия решения в условиях определенности с численной оценкой исходов является действительная функция, заданная на множестве альтернатив. Нахождение оптимального решения для такой задачи равносильно нахождению экстремума этой функции.
Посмотрим, как в этом случае обстоит дело с существованием оптимальных решений. Если множество альтернатив X конечно (как в примере 4), то целевая функция f принимает конечное число значений, среди которых будет наибольшее и наименьшее. Если же X бесконечно, то чаще всего в качестве X выступает подмножество n-мерного числового пространства Rn. При этом функция f, как правило, является непрерывной, т. е. «близким» альтернативам соответствуют «близкие» значения функции f. Как устанавливается в классической теореме анализа всякая непрерывная функция, определенная на замкнутой ограниченной области, достигает в этой области наибольшего и наименьшего значения. Сформулированная теорема является тем математическим фундаментом, на котором базируется реализуемость оптимальных решений для данного класса задач принятия решений.