

3.2. Методы уменьшения систематических погрешностей
Систематическая погрешность измерения- это составляющая погрешности измерения, остающаяся постоянной или закономерно изменяющаяся при повторных измерениях одной и той же величины. Систематические погрешности разделяются на постоянные (например, погрешность из-за смещения нуля прибора) и переменные (например, погрешность, обусловленная изменением температуры окружающей среды). Рассмотрим основные методы уменьшения систематических погрешностей измерения.
3.2.1. Уменьшение постоянных систематических погрешностей
Для уменьшения постоянной систематической погрешности наибольшее распространение получили следующие методы: введение поправок, метод замещения, метод компенсации погрешности по знаку.
Введение поправок является широко используемым методом исключения систематических погрешностей. Поправкой называют величину, которую надо прибавить к результату измерения с целью исключения систематической погрешности.
Рассмотрим введение поправки, если результат измерения содержит аддитивную 0, мультипликативнуюSи обе составляющие погрешности.
В случае наличия аддитивной погрешности она устраняется алгебраическим сложением результата измерения Y и поправки а = -0, то есть
X = Y + а = Y - 0. (3.4)
Если систематическая погрешность является мультипликативной, то она может быть исключена умножением результата измерения Y на поправочный коэффициент, который равен b= S/(S +S) [7]. В этом случае имеем
Х = Y b = Y[S/(S + S)], (3.5)
где S - чувствительность средства измерения; S - абсолютная мультипликативная погрешность (погрешность чувствительности).
При наличии обеих составляющих погрешности результат измерения может быть исправлен с помощью поправки и поправочного коэффициента
Х = (Y + a)b. (3.6)
Поправки могут быть определены различными способами: расчетным путем (например, поправки на погрешность от собственного потребления мощности средством измерения); по результатам поверки средств измерений в рабочих условиях, что дает возможность учесть все систематические погрешности без выяснения причин их возникновения.
 Метод
замещения (метод разновременного
сравнения) является одним из наиболее
распространенных методов устранения
большинства систематических погрешностей
и заключается в том, что воздействие на
измерительный прибор измеряемой величины
заменяется эквивалентным, известным
воздействием на прибор регулируемой
меры. Измерение осуществляется в два
этапа. При сохранении условий эксперимента
неизменными за результат измерения
принимается значение известной величины,
определяемое по указателю переменной
меры. Погрешность измерения при этом
будет определяться погрешностью меры
и случайной погрешностью измерительного
прибора, умноженной на2.
Метод замещения широко используется
для повышения точности измерения
величин, для которых существуют точные
регулируемые меры (например, при
измерении сопротивлений, емкостей и
др.) [4].
Метод
замещения (метод разновременного
сравнения) является одним из наиболее
распространенных методов устранения
большинства систематических погрешностей
и заключается в том, что воздействие на
измерительный прибор измеряемой величины
заменяется эквивалентным, известным
воздействием на прибор регулируемой
меры. Измерение осуществляется в два
этапа. При сохранении условий эксперимента
неизменными за результат измерения
принимается значение известной величины,
определяемое по указателю переменной
меры. Погрешность измерения при этом
будет определяться погрешностью меры
и случайной погрешностью измерительного
прибора, умноженной на2.
Метод замещения широко используется
для повышения точности измерения
величин, для которых существуют точные
регулируемые меры (например, при
измерении сопротивлений, емкостей и
др.) [4].
Метод компенсации погрешности по знакуприменяется для исключения известных по природе, но неизвестных по значению погрешностей, источники которых имеют направленное действие (погрешности от влияния магнитных полей, термоЭДС и др.). Для устранения таких погрешностей измерения проводят дважды (или четное число раз) так, чтобы систематическая погрешность входила в результаты измерений с противоположными знаками. Среднее значение из двух полученных результатов является окончательным результатом измерения [4].
Реализация этого метода может осуществляться двумя способами:
1) Изменением знака систематической погрешностипри неизменном значении измеряемой величины (например, для исключения влияния внешнего магнитного поля на показания магнитоэлектрического прибора изменение знака погрешности достигают поворотом прибора на 1800).
Х = (Y1+ Y2)/2 = (Х +С+Х -С), (3.7)
где Y1= Х +С; Y2= Х -С- результаты двух измерений величины Х, содержащие систематическую погрешностьС, природа которой известна.
2) Инвертированием входного сигналапри сохранении знака и значения систематической погрешности (например, при измерении постоянного напряжения для исключения погрешности от термоЭДС производится повторное измерение при одновременном изменении полярности измеряемого напряжения). При этом результаты двух измерений Y1 и -Y2, содержащих систематическую погрешность, могут быть представлены в виде
Y1= Х +С; -Y2= -Х +С, (3.8)
где Х и (-Х) - значение измеряемой величины.
Окончательный результат измерения определяется по формуле 3.7.
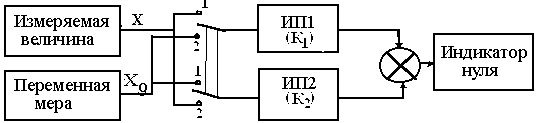 Метод
противопоставленияпозволяет
исключить мультипликативную составляющую
систематической погрешности. Для этого
проводят два измерения. В первом -
измеряемую величину Х подают на вход
измерительного преобразователя ИП1
(рис. 3.1) с коэффициентом преобразования
К1, а на вход второго преобразователя
ИП2 с коэффициентом преобразования
К2(К1К2) подают величину, воспроизводимую
мерой Х0. Затем изменением Х0производят уравновешивание. При этом
Х.К1, = Х01.К2.
При втором измерении объект измерения
и меру меняют местами и вновь производят
уравновешивание Х.К2=
ХО2.К1, (ХО1и ХО2- значения величин, воспроизводимых
мерой, которым соответствует нулевое
показание индикатора нуля).
Метод
противопоставленияпозволяет
исключить мультипликативную составляющую
систематической погрешности. Для этого
проводят два измерения. В первом -
измеряемую величину Х подают на вход
измерительного преобразователя ИП1
(рис. 3.1) с коэффициентом преобразования
К1, а на вход второго преобразователя
ИП2 с коэффициентом преобразования
К2(К1К2) подают величину, воспроизводимую
мерой Х0. Затем изменением Х0производят уравновешивание. При этом
Х.К1, = Х01.К2.
При втором измерении объект измерения
и меру меняют местами и вновь производят
уравновешивание Х.К2=
ХО2.К1, (ХО1и ХО2- значения величин, воспроизводимых
мерой, которым соответствует нулевое
показание индикатора нуля).
Рис. 3.1
Если отношение коэффициентов преобразования К1/К2остается постоянным, то результат измерения Х не содержит мультипликативной погрешности и его можно определить как [7]
 Х =ХО1ХО2. (3.9)
Х =ХО1ХО2. (3.9)
При незначительном отличии коэффициентов преобразования К1и К2друг от друга для определения измеряемой величины Х можно использовать приближенное выражение
Х (ХО1+ХО2)/2. (3.10)
Примером метода противопоставления является взвешивание на равноплечих весах, при котором уравновешивание весов осуществляется дважды. Во втором случае взвешиваемое тело и гири меняются местами. При этом устраняется погрешность, обусловленная неравноплечестью весов.