

8.1.2.Основные характеристики и области применения
Из 8.5. видно, что функция преобразования индуктивного ИП с изменяющимся зазором нелинейная. Зависимость сопротивления Z от длины воздушного зазора близка к гиперболической. В подобных ИП при начальном зазоре0практически линейный участок составляет (0,10,15)0 . А относительное изменение сопротивленияZ/Z из-за наличия активного сопротивления обмотки, потока утечки и магнитного сопротивления якоря в 2-5 раз меньше относительного изменения зазора/0[10].
Данные преобразователи характеризуются высокой чувствитель-ностью, но сравнительно малым диапазоном измерения. Они используются при малых перемещениях от единиц микрометров до единиц миллиметров (до 10 мм). Погрешность индуктивных ИП достигает 0,1 % [1].
Выходной величиной индуктивного преобразователя может быть изменение индуктивности ИП или изменение его сопротивления. Из уравнений 8.3 и 8.4 можно определить чувствительность SL и SZ преобразователя к изменению длины воздушного зазора
SL =dL/d = -2 0 Q n2/(lСТ/r + 2)2- 0 Q n2/(22). (8.6)
Часто чувствительность индуктивного ИП определяется как
SZ = (1/Z)(dZ/d) = - 2/(2 + lСТ/r) -1/. (8.7)
Преобразователи с изменяющейся площадью воздушного зазора обладают линейной функцией преобразования и применяются при измерении перемещений порядка 5–20 мм.
Преобразователи с разомкнутой магнитной цепью (соленоидальные ИП)имеют худшие характеристики, по сравнению с преобразователями с изменяющимисяиQ. Так как магнитный поток в основном замыкается через воздух, их чувствительность ниже. Кроме того, они потребляют относительно большую мощность и, в связи с большим рассеянием магнитного потока, подвержены сильному влиянию внешних магнитных полей. Функция преобразования нелинейна. Подобные преобразователи применяются для измерения больших линейных перемещений (10–100 мм). Известны конструкции таких преобразователей для перемещений до 2 м [16].
Преобразователи с распределенными параметрами используются для измерения больших линейных перемещений. Индуктивные ИП с электроповодным диском используются для измерения угловых перемещений до 180 360О. Изменяя профиль диска, можно получить любой вид зависимости индуктивности от угла поворота диска.
Кроме измерения линейных и угловых перемещений индуктивные ИП используются для измерения размеров, толщины изделий, уровня и толщины различных покрытий, сил и крутящих моментов, ускорений и параметров вибраций.
8.1.3. Погрешности индуктивных ип
Среди погрешностей индуктивных ИП можно выделить следующие:
1) температурную погрешность, обусловленную температурным изменением активного сопротивления катушки, магнитной проницаемости материала магнитопровода и якоря и размеров магнитной цепи;
2) погрешность, возникающую из-за действия силы притяжения якоря;
3) погрешность линейности функции преобразования;
4) при работе преобразователей в мостовых схемах возникает погрешность из-за нестабильности напряжения и частоты питания моста, а также формы кривой питающего напряжения.
Для улучшения свойств индуктивных ИП используются дифференциальные преобразователи. Они состоят из двух одинарных преобразователей, имеющих общий подвижный элемент. На рис. 8.2. показаны конструкции дифференциальных ИП с изменяющейся длиной воздушного зазора (рис. 8.2 а), с
и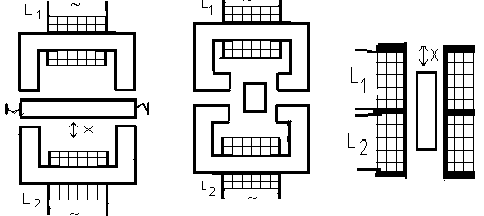 зменяющейся
площадью воздушного зазора (рис. 8.2 б),
с разомкнутой магнитной цепью (рис. 8.2
в).
зменяющейся
площадью воздушного зазора (рис. 8.2 б),
с разомкнутой магнитной цепью (рис. 8.2
в).
а) б) в)
Рис. 8.2.
В дифференциальных преобразователях при перемещении подвижного якоря под действием входной величины индуктивность одной катушки, например L1, возрастает, а второйL2 уменьшается. При включении в измерительную цепь выходной сигнал пропорционален разности выходных сигналов каждого преобразователя.
Дифференциальные преобразователи позволяют существенно уменьшить погрешности, повысить чувствительность и увеличить линейный участок характеристики. Линейный участок составляет (0,3 – 0,4)о.
На практике индуктивные измерительные преобразователи всегда выполняются дифференциальными.