

Система отсчёта
— это совокупность тела отсчета,
связанной с ним системы координат и
системы отсчёта времени, по отношению
к которым рассматривается движение
(или равновесие) каких-либо материальных
точек или тел.
Материа́льная
то́чка—
простейшая физическая модель в механике
— тело, размеры которого допустимо
считать бесконечно малыми в пределах
допущений исследуемой задачи. Практически
под материальной точкой понимают
обладающее массой тело, размерами и
формой которого можно пренебречь при
решении данной задачи.
Кинематический
закон движения
– это
функция, выражающая
положение точки в любой момент времени:
r
= r(t)
(Изменение радиус-вектора с течением
времени) Уравнение
является
векторной формой закона.
Движение
материальной точки полностью определено,
если координаты
материальной точки заданы в зависимости
от времени: x
= x(t),
y =
y(t),
z =
z(t)
.
Вектор
перемещения
∆r
= r
- r0
– это вектор,
проведенный из
начального положения движущейся точки
в положение ее в данный момент времени
(приращение
радиус-вектора
точки за рассматриваемый промежуток
времени): ∆r
= r
- r0
= r(t)
- r(t0)
. В пределе ∆t→0
модуль элементарного
перемещения равен элементарному пути:
|dr|
= ds
.
Скорость
– векторная величина, значит, её можно
записать в виде ![]() .
С другой стороны
.
С другой стороны ![]() .
Следовательно, проекция скорости
.
Следовательно, проекция скорости ![]()
![]() …
Величина (модуль) скорости
…
Величина (модуль) скорости ![]() .
При движении
материальной точки её скорость меняется
как по величине, так и по направлению.
Как быстро это происходит в произвольный
момент времени, характеризует векторная
величина ускорение.
.
При движении
материальной точки её скорость меняется
как по величине, так и по направлению.
Как быстро это происходит в произвольный
момент времени, характеризует векторная
величина ускорение.
![]() .
.
![]() Проекция вектора ускорения
Проекция вектора ускорения ![]()
![]() Траектория
– это
кривая, которую
описывает радиус-вектор
r(t)
координат
материальной точки (или
тела) с
течением времени.
Пройденный
путь частицы
от
Траектория
– это
кривая, которую
описывает радиус-вектор
r(t)
координат
материальной точки (или
тела) с
течением времени.
Пройденный
путь частицы
от ![]() до
до ![]()
![]() .
Угловая
скорость и угловое ускорение. Связь
между угловыми и линейными величинами.
Поворот
абсолютно твёрдого тела на угол
.
Угловая
скорость и угловое ускорение. Связь
между угловыми и линейными величинами.
Поворот
абсолютно твёрдого тела на угол ![]() вокруг некоторой оси можно задать с
помощью направляющего отрезка
.
вокруг некоторой оси можно задать с
помощью направляющего отрезка
.
![]() – длина этого отрезка совпадает с углом
поворота, а направление параллельно
оси вращения и определяется правилом
правого винта.
Для
не выполняется правило сложения векторов.
однако при бесконечно малых (элементарных)
поворотах
– длина этого отрезка совпадает с углом
поворота, а направление параллельно
оси вращения и определяется правилом
правого винта.
Для
не выполняется правило сложения векторов.
однако при бесконечно малых (элементарных)
поворотах ![]() правило сложения векторов выполняется.
Как быстро происходит вращение
характеризует векторная (псевдовекторная)
величина угловая
скорость
правило сложения векторов выполняется.
Как быстро происходит вращение
характеризует векторная (псевдовекторная)
величина угловая
скорость
![]() .
При
равномерном движении вокруг неподвижной
оси величина угловой скорости
.
При
равномерном движении вокруг неподвижной
оси величина угловой скорости ![]() .
Естественным образом обобщена на случай
вращения с переменной
.
Естественным образом обобщена на случай
вращения с переменной ![]() понятие количества оборотов, или частота
вращения (
понятие количества оборотов, или частота
вращения (![]() ,
,
![]() )
и период (
)
и период (![]() ,
,
![]() ).
При произвольном вращении угловая
скорость может меняться как по величине,
так и по направлению. Для характеристики
такого измерения вводится псевдовектор
углового
ускорения
).
При произвольном вращении угловая
скорость может меняться как по величине,
так и по направлению. Для характеристики
такого измерения вводится псевдовектор
углового
ускорения
![]() .
При вращении тела вокруг неподвижной
оси все его точки движутся по окружности,
скорости и ускорения различных точек
различны, а угловые скорости и ускорения
одинаковы. Угол, измеряемый в радианах
.
При вращении тела вокруг неподвижной
оси все его точки движутся по окружности,
скорости и ускорения различных точек
различны, а угловые скорости и ускорения
одинаковы. Угол, измеряемый в радианах
![]() ,
l
– длина дуги, на которую опирается угол,
,
l
– длина дуги, на которую опирается угол,
![]() .
Точка движется по окружности, поэтому
у неё есть нормальное
ускорение
(
.
Точка движется по окружности, поэтому
у неё есть нормальное
ускорение
(![]() )
и тангенциальное
(
)
и тангенциальное
(![]() ).
).
![]() .
.
Ускорение. Нормальное и тангенциальное ускорения
При
движении материальной точки её скорость
меняется как по величине, так и по
направлению. Как быстро это происходит
в произвольный момент времени,
характеризует векторная величина
ускорение.
![]() .
.
![]() Проекция вектора ускорения
Проекция вектора ускорения ![]()
![]() …
…
Рассмотрим
движение частицы, совершаемое в плоскости.
Скорость направлена по касательной
траектории, поэтому можно записать ![]() .
Здесь единичный вектор
.
Здесь единичный вектор ![]() задаёт направление касательной,
задаёт направление касательной, ![]() .
.
Ускорение
![]() ,
направленное по касательной к траектории,
определяемое скоростью изменение
величины скорости, или модуля, называется
тангенциальным
ускорением.
,
направленное по касательной к траектории,
определяемое скоростью изменение
величины скорости, или модуля, называется
тангенциальным
ускорением.
![]()
![]() – нормальное
ускорение
(характеризует быстроту изменения
направления скорости),
– нормальное
ускорение
(характеризует быстроту изменения
направления скорости), ![]() - единичный вектор, перпендикулярный
- единичный вектор, перпендикулярный
![]() и направленный внутрь кривой, R
– радиус кривизны линии.
и направленный внутрь кривой, R
– радиус кривизны линии.
Разложение
ускорения на тангенциальную и нормальную
компоненты (вторая из которых и есть
центростремительное или нормальное
ускорение) можно найти, продифференцировав
по времени вектор скорости, представленнный
в виде
![]() через единичный вектор касательной
через единичный вектор касательной
![]() :
:
![]()
где первое слагаемое — тангенциальное ускорение, а второе — нормальное ускорение.
Здесь
использовано обозначение
![]() для
единичного вектора нормали к траектории
и
для
единичного вектора нормали к траектории
и
![]() — для текущей длины траектории (
— для текущей длины траектории (![]() );
в последнем переходе также использовано
очевидное
);
в последнем переходе также использовано
очевидное
![]() . Далее можно просто формально назвать
член
. Далее можно просто формально назвать
член
![]() —
нормальным (центростремительным)
ускорением. При этом его смысл, смысл
входящих в него объектов, а также
доказательство того факта, что он
действительно ортогонален касательному
вектору (то есть что
—
нормальным (центростремительным)
ускорением. При этом его смысл, смысл
входящих в него объектов, а также
доказательство того факта, что он
действительно ортогонален касательному
вектору (то есть что
![]() — действительно вектор нормали) — будет
следовать из геометрических соображений
(впрочем, то, что производная любого
вектора постоянной длины по времени
перпендикулярна самому этому вектору,
— достаточно простой факт; в данном
случае мы применяем это утверждение
для
— действительно вектор нормали) — будет
следовать из геометрических соображений
(впрочем, то, что производная любого
вектора постоянной длины по времени
перпендикулярна самому этому вектору,
— достаточно простой факт; в данном
случае мы применяем это утверждение
для
![]() ).
).
Равнопеременное движение - движение точки, при котором её касательное ускорение wt (в случае прямолинейного Р. д. всё ускорение w) постоянно. Скорость v, которую имеет точка через t сек после начала движения, и её расстояние s от начального положения, измеренное вдоль дуги траектории, определяются при Р. д. равенствами: v = v0 + wtt, s = v0t + wtt2/2, где v0 — начальная скорость точки. Когда знаки v и wt одинаковы, Р. д. является ускоренным, а когда разные — замедленным. Равноускоренное движение – это движение тела (материальной точки) с положительным ускорением, то есть при таком движении тело разгоняется с неизменным ускорением. В случае равноускоренного движения модуль скорости тела с течением времени возрастает, направление ускорения совпадает с направлением скорости движения.
![]() Зная,
что
Зная,
что![]() , найдём формулу для определения
координаты x:
, найдём формулу для определения
координаты x:
![]() Равнозамедленное
движение
– это движение тела (материальной точки)
с отрицательным ускорением, то есть при
таком движении тело равномерно
замедляется. При равнозамедленном
движении векторы скорости и ускорения
противоположны, а модуль скорости с
течением времени уменьшается.
В
механике любое прямолинейное движение
является ускоренным, поэтому замедленное
движение отличается от ускоренного
лишь знаком проекции вектора ускорения
на выбранную ось системы
координат.
Кинематический
закон равнопеременного движения
Закон
равноускоренного движения получается
в результате решения простейшего
дифференциального уравнения вида:
Равнозамедленное
движение
– это движение тела (материальной точки)
с отрицательным ускорением, то есть при
таком движении тело равномерно
замедляется. При равнозамедленном
движении векторы скорости и ускорения
противоположны, а модуль скорости с
течением времени уменьшается.
В
механике любое прямолинейное движение
является ускоренным, поэтому замедленное
движение отличается от ускоренного
лишь знаком проекции вектора ускорения
на выбранную ось системы
координат.
Кинематический
закон равнопеременного движения
Закон
равноускоренного движения получается
в результате решения простейшего
дифференциального уравнения вида:![]() Общее
решение этого уравнения дается формулой:
Общее
решение этого уравнения дается формулой:
![]() ;Здесь
;Здесь
![]() и
и
![]() —
произвольные константы, соответствующие
начальной координате и начальной
скорости.
—
произвольные константы, соответствующие
начальной координате и начальной
скорости.
В
случае тела,
брошенного под произвольным углом к
горизонту,
из равенств и хорошо известные соотношения
для времен полета, подъема и спуска
![]() максимальной
высоты подъема:
максимальной
высоты подъема:
![]() ,
дальности полета:
,
дальности полета:
![]() .
.
И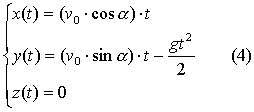 сключая
из двух первых равенств системы время,
легко получить уравнение траектории:
сключая
из двух первых равенств системы время,
легко получить уравнение траектории:

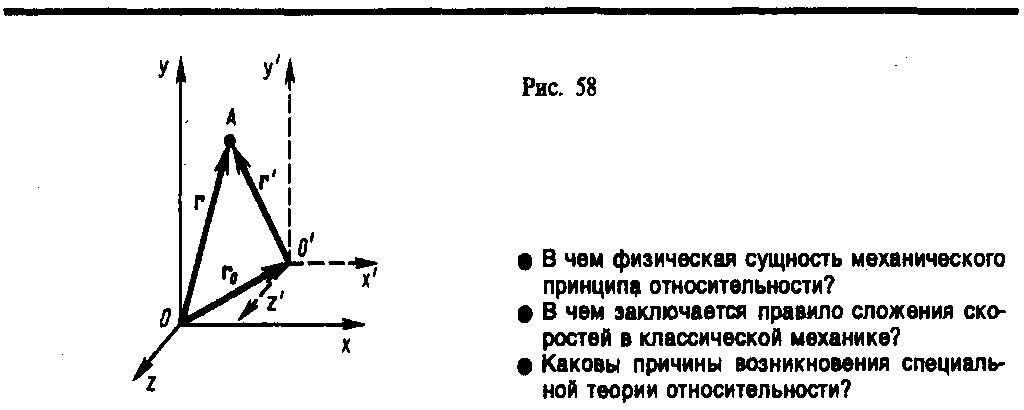
Преобразования Галилея. Механический принцип относительности
В классической механике справедлив механический принцип относительности (принцип относительности Галилея): законы динамики одинаковы во всех инерциальных системах отсчета.
Для его доказательства рассмотрим две системы отсчета: инерциальную систему K (с координатами х, у, z), которую условно будем считать неподвижной, и систему K' (с координатами x', у', z'), движущуюся относительно K равномерно и прямолинейно со скоростью u (u=const). Отсчет времени начнем с момента, когда начала координат обеих систем совпадают. Пусть в произвольный момент времени t расположение этих систем друг относительно друга имеет вид, изображенный на рис. 58. Скорость u направлена вдоль OO', радиус-вектор, проведенный из О в О', r0=ut.
Найдем связь между координатами произвольной точки А в обеих системах. Из рис. 58 видно, что
![]() (34.1)
(34.1)
Уравнение (34.1) можно записать в проекциях на оси координат:
![]() (34.2)
(34.2)
Уравнения (34.1) и (34.2) носят название преобразований координат Галилея.
В частном случае, когда система К' движется со скоростью т вдоль положительного направления оси х системы К (в начальный момент времени оси координат совпадают), преобразования координат Галилея имеют вид
![]()
В классической механике предполагается, что ход времени не зависит от относительного движения систем отсчета, т. е. к преобразованиям (34.2) можно добавить еще одно уравнение:
![]() (34.3)
(34.3)
Записанные соотношения справедливы лишь в случае классической механики (u<<с), а при скоростях, сравнимых со скоростью света, преобразования Галилея заменяются более общими преобразованиями Лоренца* (§ 36).
Продифференцировав выражение (34.1) по времени (с учетом (34.3)), получим уравнение
![]() (34.4)
(34.4)
которое представляет собой правило сложения скоростей в классической механике.
Ускорение в системе отсчета К

Таким образом, ускорение точки А в системах отсчета К и К', движущихся друг относительно друга равномерно и прямолинейно, одинаково:
![]() (34.5)
(34.5)
Следовательно, если на точку А другие тела не действуют (а=0), то, согласно (34.5), и а'=0, т. е. система К' является инерциальной (точка движется относительно нее равномерно и прямолинейно или покоится).
Таким образом, из соотношения (34.5) вытекает подтверждение механического принципа относительности: уравнения динамики при переходе от одной инерциальной системы отсчета к другой не изменяются, т. е. являются инвариантными по отношению к преобразованиям координат. Галилей обратил внимание, что никакими механическими опытами, проведенными в данной инерциальной системе отсчета, нельзя установить, покоится ли она или движется равномерно и прямолинейно. Например, сидя в каюте корабля, движущегося равномерно и прямолинейно, мы не можем определить, покоится корабль или движется, не выглянув в окно.
Кинема́тика твёрдого тела— раздел кинематики, изучающий движение абсолютно твёрдого тела, не вдаваясь в вызывающие его причины.
Различают пять видов движения твердого тела: 1) поступательное; 2)вращение вокруг неподвижной оси; 3) плоское движение; 4) движение вокруг неподвижной точки и 5) свободное движение. Первые два вида являются основными движениями твердого тела. Число степеней свободы твердого тела i – это число независимых координат, однозначно определяющих положение твердого тела в пространстве.