

25 Оценка качества регулирования при гармонических воздействиях.
При гармонических воздействиях качество системы принято оценивать по амплитудо-фазовой, амплитудо-частотной и логарифмическим частотным характеристикам.
Для
оценки качества переходных процессов
системы можно использовать следующие
величины: показатель колебательности
М, резонансная (собственная частота)
![]() ,
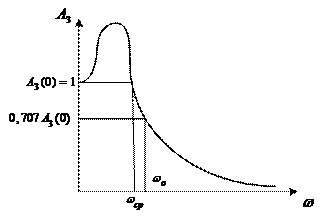
полоса пропускания системы
,
полоса пропускания системы![]() ,
частота среза
,
частота среза![]() ,
запасы устойчивости по модулю и по
фазе.
,
запасы устойчивости по модулю и по
фазе.
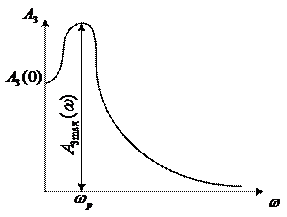
Показатель
колебательности М– это отношение
максимального значения АЧХ
![]() замкнутой
системы к ее значению при
замкнутой
системы к ее значению при
![]()
![]() при
при![]() .
.
Показатель колебательности характеризует склонность системы к колебаниям. Чем выше М, тем менее качественная система при прочих равных условиях.
Частоту
![]() ,
при которой АЧХ замкнутой системы имеет
максимум, называют резонансной частотой
системы, т.е. на этой частоте гармонические
колебания проходят через систему с
наименьшим усилием. Полоса пропускания
системы – это интервал частот от
до
,
при которой АЧХ замкнутой системы имеет
максимум, называют резонансной частотой
системы, т.е. на этой частоте гармонические
колебания проходят через систему с
наименьшим усилием. Полоса пропускания
системы – это интервал частот от
до
![]() ,
при котором выполняется условие:
,
при котором выполняется условие:
![]() или
при
или
при
![]() величина
величина
![]()
![]() .
Полоса пропускания не должна быть
слишком широкой, иначе система будет
воспроизводить высокочастотные помехи.
.
Полоса пропускания не должна быть
слишком широкой, иначе система будет
воспроизводить высокочастотные помехи.
Частота
среза
- частота, при которой АЧХ системы
принимает значение равное 1, т.е.
![]() .
Эта частота косвенно характеризует
длительность переходного процесса.
Чем меньше частота среза, тем хуже
быстродействие системы
.
Эта частота косвенно характеризует
длительность переходного процесса.
Чем меньше частота среза, тем хуже
быстродействие системы
,
![]()
если переходный процесс имеет одно-два колебания, то время достижения переходной характеристикой первого максимума
![]()
Склонность системы к колебаниям характеризуется величинами ее запасов устойчивости по модулю и по фазе. Запасы устойчивости рассчитывают по АФЧХ и ЛЧХ. В хорошо демпфированных системах запас устойчивости по амплитуде колеблется в пределах от 6 до 20 дБ, а запас по фазе – от 30 до 60º.
Т.к. рассмотренные выше показатели косвенно определяют быстродействие, перерегулирование и т.п., то они могут быть использованы и для расчета систем, находящихся под воздействием непериодических возмущений.
26 Корневые методы оценки качества регулирования.
Качество системы – это соответствие системы, предъявляемым к ней требованиям (например: по точности, быстродействию и другим показателям качества).
Качество оценивается качеством переходного процесса и точностью в установившемся режиме, т.е. с помощью динамических и статических показателей качества.
Основа корневых методов – анализ расположения корней характеристического уравнения замкнутой системы в комплексной плоскости
![]()
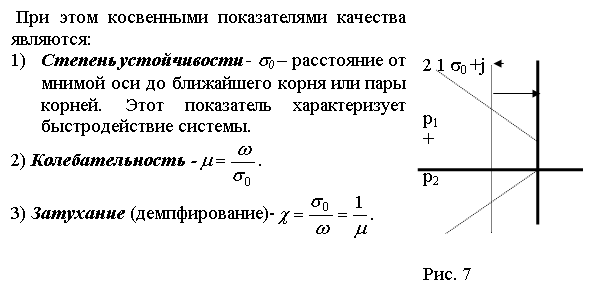
Расположение
корней характеристического уравнения
замкнутой системы в комплексной
плоскости
![]() характеризует не только устойчивость,
но и качество системы (рис. 7).
характеризует не только устойчивость,
но и качество системы (рис. 7).
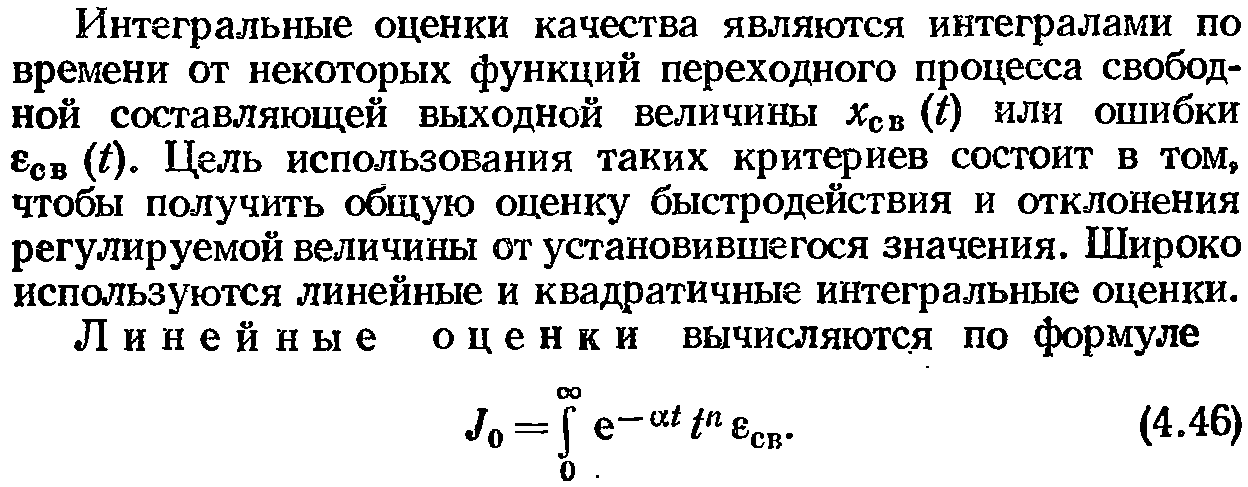
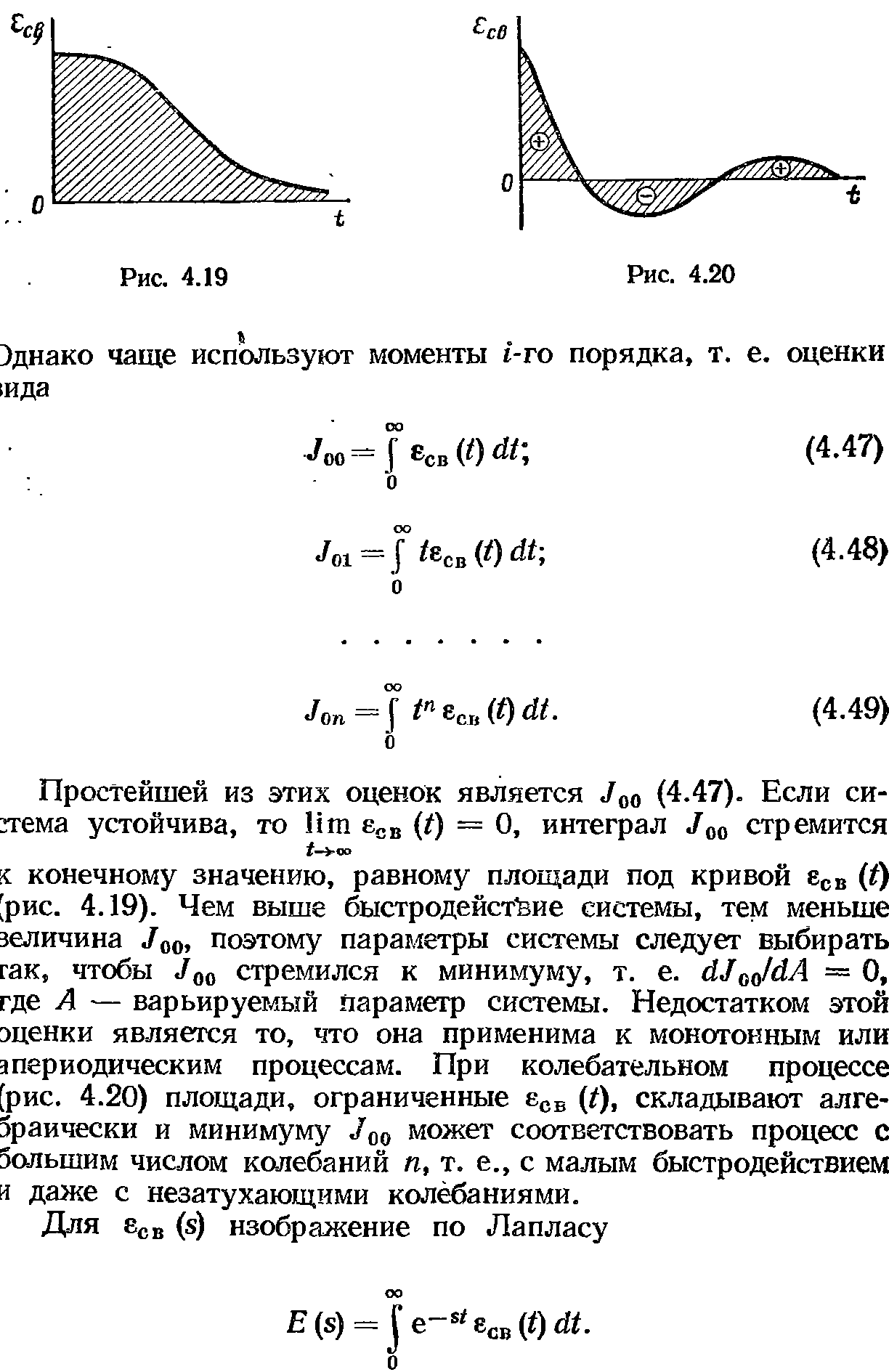
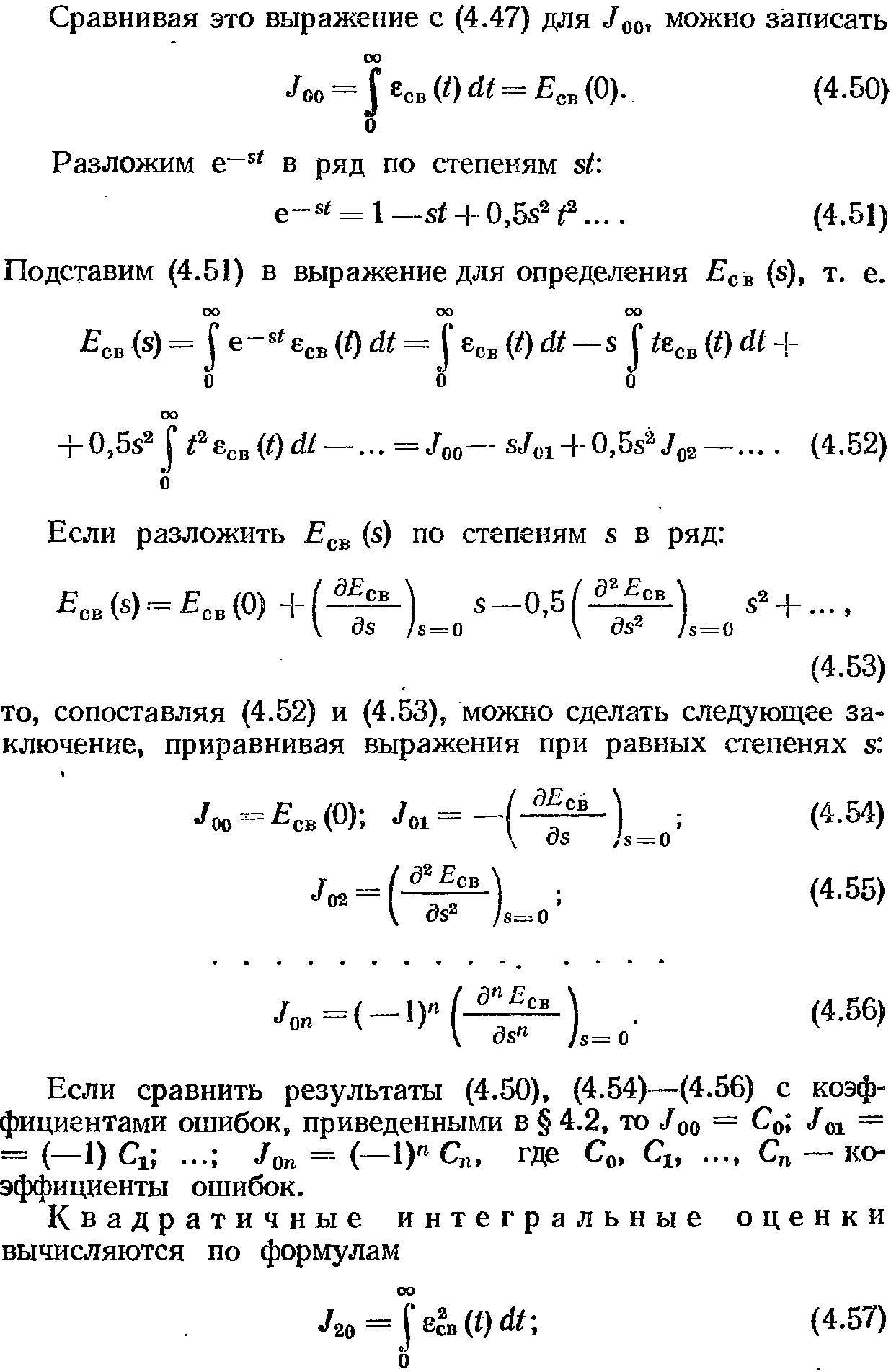
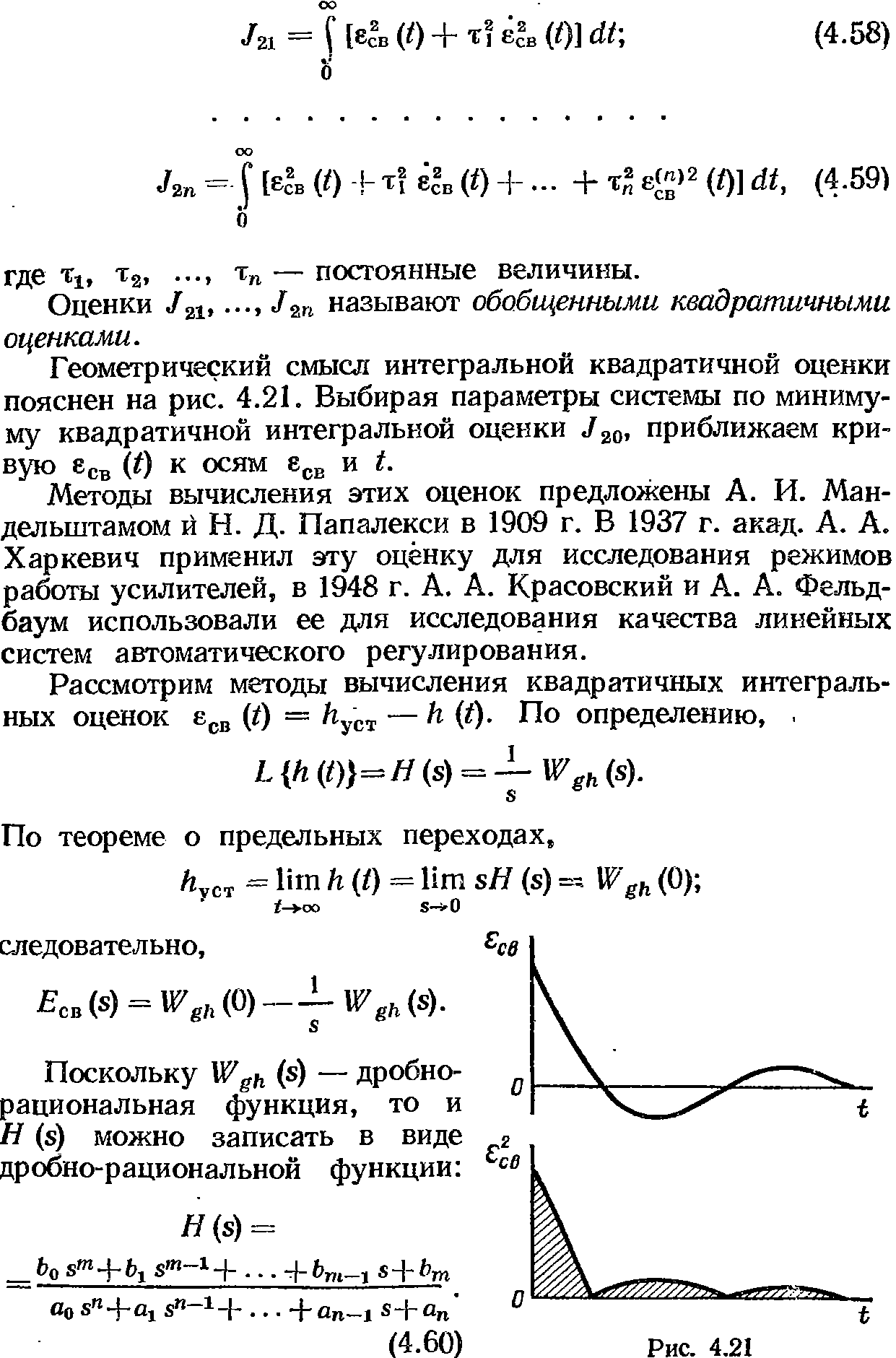
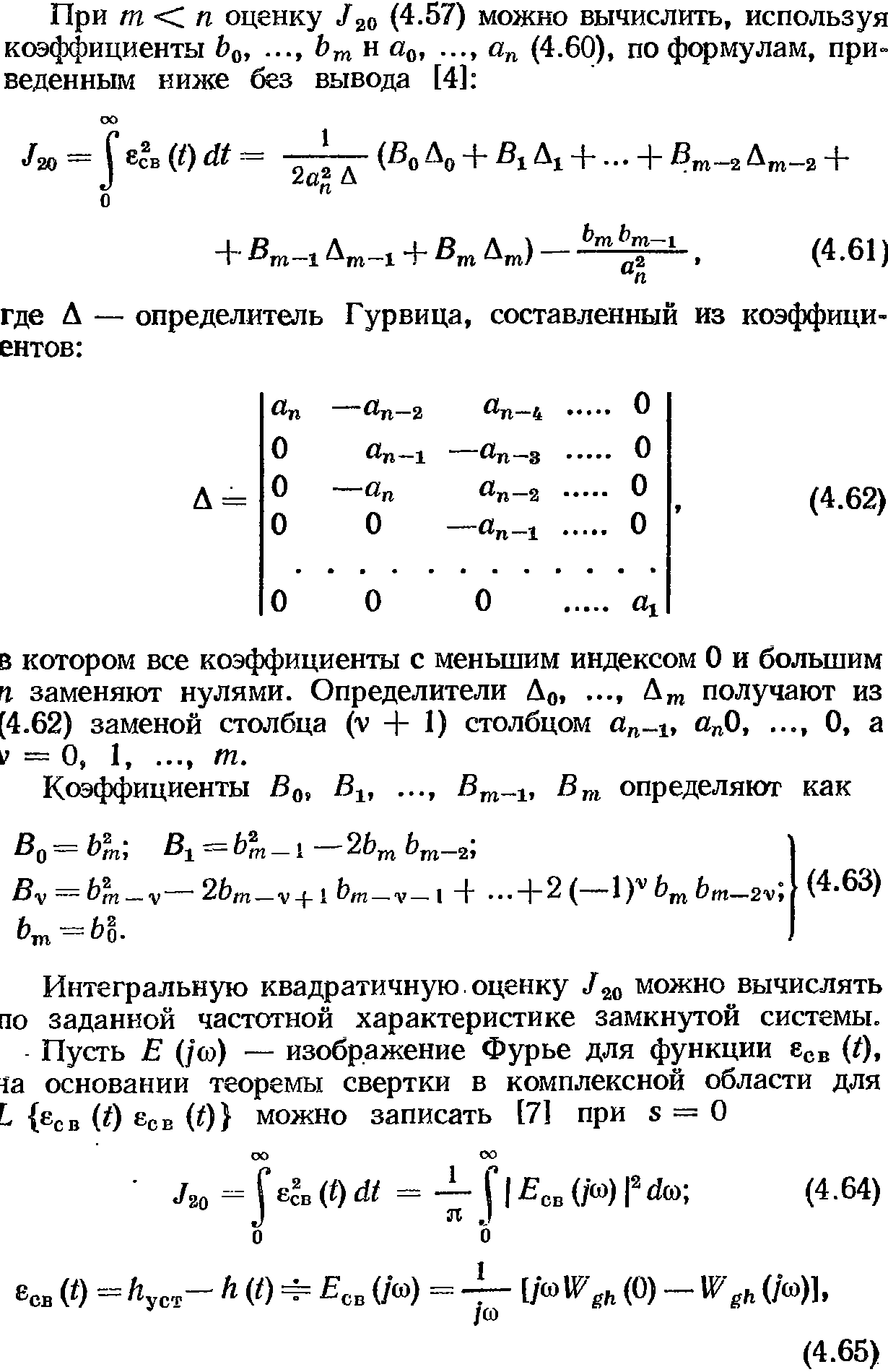
27 Интегральные методы оценки качества. Линейная и квадратичная.

28 Квантование. Виды квантования.
Преобразование непрерывного сигнала в дискретный сигнал называется квантованием.
При квантовании по уровню непрерывный сигнал х(t) преобразуется в последовательность дискретных сигналов, фиксированных в произвольные моменты времени при условии x = const. Системы, в которых используются сигналы, квантованные по конечному числу уровней (часто 2-3 уровня), называются релейными системами. Квантование по уровню является нелинейным преобразованием сигналов, следовательно, релейные системы относятся к классу нелинейных систем.
При квантовании по времени сигналы фиксируются в дискретные моменты времени t = const. При этом уровни сигнала могут принимать произвольные значения. Системы, реализующие квантование сигналов по времени, называются импульсными системами (ИС). Квантование по времени осуществляется импульсным элементом, который в частном случае пропускает входной сигнал х(t) лишь в течение некоторого времени.
При квантовании по уровню и по времени непрерывный сигнал заменяется дискретными уровнями, ближайшими к значениям непрерывного сигнала в дискретные моменты времени t = const. Дискретные системы, реализующие сигналы, квантованные по уровню и по времени, называются релейно-импульсными, или цифровыми. В этих системах квантование по уровню и по времени осуществляется кодоимпульсным модулятором или цифровым вычислительным устройством.