

1.2.3.3. Нахождение оператора звена последовательной коррекции
Найдем оператор звена коррекции, включение которого образует систему с ЧХ, соответствующей желаемой. Звено коррекции Wк включается последовательно со звеньями, образующими ПФ исходной разомкнутой системы Wр,исх(s) – см. рис.7. Поэтому имеем
Wр,ж(s)= Wк(s)Wр,исх(s). (11)
Тогда для ЛЧХ выполняется
Lр,ж()= Lк()+Lр,исх(). (12)
Отсюда
Lк()=Lр,ж()Lр,исх(). (13)
Таким образом, ЛАХ звена коррекции может быть построена графическим вычитанием двух характеристик.
 Для
получения оператора Wк(s)
необходимо иметь асимптотическую ЛАХ
звена. Для этого следует аппроксимировать
построенную Lк()
отрезками прямых с наклонами, кратными
20 дБ/дек. По этой характеристике
записывается ПФ Wк(s).
Для
получения оператора Wк(s)
необходимо иметь асимптотическую ЛАХ
звена. Для этого следует аппроксимировать
построенную Lк()
отрезками прямых с наклонами, кратными
20 дБ/дек. По этой характеристике
записывается ПФ Wк(s).

Рис.10
 Заметим,
что при построении асимптотических
характеристик Lр,исх()
и Lр,ж()
процедура построения ЛАХ звена коррекции
упрощается; в результате получается
сразу и асимптотическая Lк().
Заметим,
что при построении асимптотических
характеристик Lр,исх()
и Lр,ж()
процедура построения ЛАХ звена коррекции
упрощается; в результате получается
сразу и асимптотическая Lк().
Для рассматриваемого примера (рис.7) построена ЛАХ Lк() – см.рис.9. По ней запишем оператор ПФ:
 (14)
(14)
В результате введения такого оператора в звено коррекции получаем СУ с переходным процессом yж(t) – см.рис.9. Этот переходный процесс имеет следующие показатели качества: время первого согласования t1=0.19c, время регулирования tр=0.8с, перерегулирование =7%.
2. Практическая часть
Пример. Дана исходная астатическая САУ (рис.2.1) с параметрами, представленными в табл.2.1. При замыкании единичной обратной связи (ключ S – замкнут) САУ возбуждается, т.е. является неустойчивой.

Рис.2.1
Таблица 2.1
K1 |
K2 |
K3 |
T1, с |
T2, с |
σ, % |
5 |
100 |
1 |
0,01 |
0,02 |
20 |
Рассчитать корректирующее устройство (КУ), которое устраняет возбуждение САУ. Корректирующее устройство вставляется последовательно в разрез между звеньями САУ (рис.2.2). При этом перерегулирование σ не должно превышать заданного значения (20 %).

Рис.2.2
РЕШЕНИЕ.
Строим исходную логарифмическую амплитудно-частотную характеристику (ЛАЧХ) разомкнутой САУ (ключ S – разомкнут);
– находим общий коэффициент усиления K :
– перемножаем коэффициенты усиления и переводим результат в децибелы
![]() дб;
дб;
– согласно заданию записываем сопрягающие частоты
![]() ;
;
 –
по
таблице соответствий на рис.2.3 переводим
сопрягающие частоты в деления по клеткам
на оси абсцисс (в таблице соответствий
указаны мантиссы для логарифмической
шкалы через 5 клеток
–
по
таблице соответствий на рис.2.3 переводим
сопрягающие частоты в деления по клеткам
на оси абсцисс (в таблице соответствий
указаны мантиссы для логарифмической
шкалы через 5 клеток![]() ;
;
– строим исходную ЛАЧХ – для этого на уровне 54 дб проводим линию до пересечения с ординатой со значением lgω = 1 c-1 и отмечаем опорную т.А (рис.2.3);
– так как САУ астатическая, через точку А проводим линию под углом -20 дб/дек до пересечения с сопрягающей частотой ω2 = 50 с-1 и отмечаем точку В; (в статической САУ от опорной т. А проводим горизонтальную линию до пересечения с с ординатой со значением lgω = 1 c-1; остальные построения – как и в астатической САУ);
– от точки В проводим линию под углом -40 дб/дек до пересечения с сопрягающей частотой ω1 = 100 с-1 и отмечаем точку С;
– от точки С проводим линию под углом -60 дб/дек до т.D.

Рис.2.3
2. Строим скорректированную ЛАЧХ – для этого задаемся отношением максимальной сопрягающей частоты ω1 = 100 с-1 к частоте среза ωср.КУ корректирующего устройства
![]() ,
,
откуда
![]() ,
,
которую откладываем на рис. 2.3 (т.F);
– через т.F проводим линию вверх под углом -20 дб/дек до т. G, абсциссу которой находим из номограммы (рис.4) следующим образом: на уровне 0.2, что соответствует выбросу σ = 20% на сплошной кривой с усилением, примерно 54 дб отмечаем точку G1 и находим ее абсциссу равную 0,2;

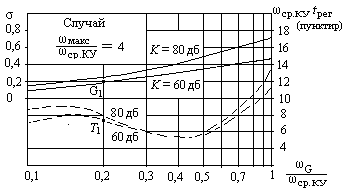
Рис.2.4
далее находим частоту ωG, соответствующую т. G на рис.2.3.
![]() ;
;
– от точки G на рис. 2.3 проводим линию вверх под углом -40 дб/дек до пересечения с исходной ЛАЧХ и отмечаем т. H;
– продлеваем линию из точки F вниз до пересечения с абсциссой т. C и отмечаем т. E, затем проводим линию под углом -80 дб/дек от т. Е, параллельную линии C – D.
Построение ЛАЧХ для статической САУ отличается от астатической тем, что необходимо продлить от опорной т. А горизонтальную линию до пересечения с первой низкой частотой сопряжения затем, пристыковываем отрезок В1 – С1 с наклоном -20 дб/дек, к которому пристыковываем отрезок С1 – D1 с наклоном -40 дб/дек (рис.2.3 – пунктирные линии, отрезки А – В1, С1 – D1).
Строим ЛАЧХ корректирующего устройства как разность скорректированной и исходной ЛАЧХ (рис.2.3)
![]() .
.
Для статической САУ ЛАЧХ корректирующего устройства на рис. 2.3 показана пунктиром.
Рассчитываем элементы R1, R2, C1, C2 корректирующего устройства (рис.2.5, б).

Рис. 2.5
 –
выписываем
частоты из рис. 2.3
–
выписываем
частоты из рис. 2.3
ωB = 50 c-1;
ωC = 100 c-1;
ωG = 5 c-1;
ωH = 0,273 c-1;
– задаемся значением конденсатора
C1= 2 мкФ;
– находим номинал резистора R1
![]() Ом;
Ом;
– находим номинал резистора R2
 (Ом);
(Ом);
– находим номинал конденсатора С2
![]() (Ф).
(Ф).
Далее
оцениваем время регулирования tрег
из номограммы (рис.2.4). В найденном выше
сечении с абсциссой равной 0,2 на штриховой
линии с усилением
![]() отмечаем т. Т1
и находим ее ординату равную 7,6.
отмечаем т. Т1
и находим ее ординату равную 7,6.
Из выражения
![]() ,
,
находим

![]() с.
с.
Вставляем КУ в исходную САУ.(рис. 2.5).