

26.Момент силы относительно точки как вектор
Из
теоремы Вариньона известно, что моменты
сил, лежащих в одной плоскости,
складываются алгебраически. Также
алгебраически складываются моменты
пар, расположенных в одной плоскости.
Говоря о приведении плоской системы
сил к данному центру, при переносе точки
приложения силы F
в какую-нибудь точку О, не лежащую на
линии действия силы (рис.7.5), получается
присоединенная пара (F,
F''),
причем

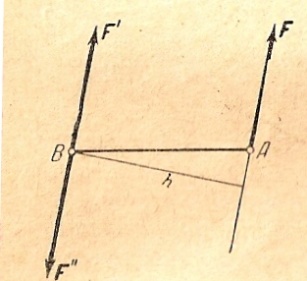 Рис.7.5.
Рис.7.5.
В этом равенстве под моментом пары и моментом силы относительно точки О, мы понимали алгебраические значения момента присоединенной пары и момента силы F относительно точки О. Но в случае, когда пары лежат в пересекающихся плоскостях, их моменты складываются по правилу векторного, или геометрического сложения, и в этом случае приходится рассматривать момент пары как векторную величину. Поэтому, при изучении произвольной системы сил, момент силы относительно данной точки следует рассматривать как вектор.
Поэтому при изучении произвольной системы сил мы будем рассматривать момент силы относительно какой-нибудь точки как вектор, равный вектору моменту той присоединенной пары, которую получим, перенося данную силу в эту точку.
Зная, как определяются модуль и направление вектора-момента пары, можно дать определение момента силы относительно точки:
Модуль момента силы F относительно точки О равен произведению модуля этой силы на длину перпендикуляра h, опущенного из точки О на линию действия силы и численно равен удвоенной площади треугольника ОАВ, который получится при соединении начало и конца силы F с точкой О (рис.7.5)
Момент силы F относительно точки О направлен по перпендикуляру к плоскости, в которой лежит вектор F и точка О, притом в ту сторону, чтобы смотря с конца вектора-момента на силу F, мы видели эту силу, направленной против движения часовой стрелки относительно точки О (рис.7.6)
Вектор mО есть вектор момент силы F относительно точки О, равный моменту пары (F, F'') Начало вектора-момента силы F относительно точки О совпадает с этой точкой.
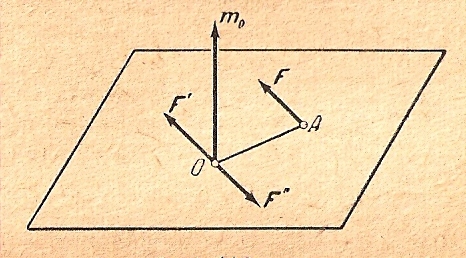 Рис.7.6.
Рис.7.6.
Когда сила F и точка О даны, вектор mО вполне определен, поэтому при построении этого вектора не надо переносить силу F в точку О и рассматривать присоединенную пару. Понятно, что с изменением положения точки О вектор mО изменяется по модулю и направлению, за исключением случая, когда точка О перемещается по прямой параллельной линии действия силы F. Т.е. модуль и направление момента силы относительно точки зависят не только от этой силы, но и от положения этой точки.
При переносе точки приложения силы F в любую точку тела по линии действия этой силы вектор момента силы mО не изменяется.
27 и 28.
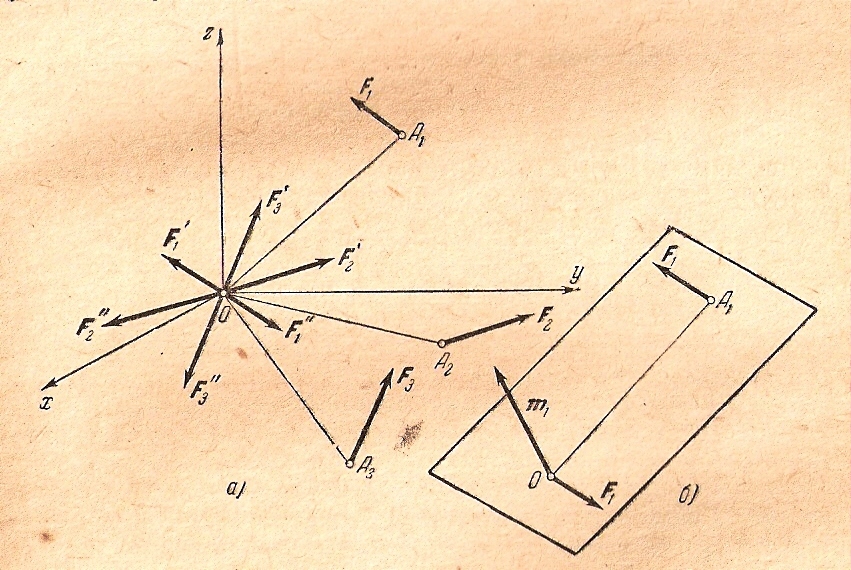 Рис.8.3.
Рис.8.3.
Выведем аналитические формулы, определяющие модули и направления главного вектора R' и главного момента МО. Возьмем прямоугольную систему координат Охуz, начало которой выберем в центре приведения О рис.8.3.
Главный
вектор R'
равен векторной сумме сил Fi:

Тогда для проекций вектора R' на координатные оси будем иметь:
 ,
,
 ,
,

Зная
все три проекции вектора R',
его модуль можно найти по формуле:
Для определения направления этого вектора найдем его направляющие косинусы:
Из
равенства
 ,
следует,
что проекция главного момента МО
на какую-нибудь ось равна алгебраической
сумме проекций на ту же ось слагаемых
векторов mi:
,
следует,
что проекция главного момента МО
на какую-нибудь ось равна алгебраической
сумме проекций на ту же ось слагаемых
векторов mi:
 ,
,
 ,
,

Проекция
момента силы Fi
относительно точки О на ось, проходящую
через эту точку, равна моменту силы Fi
относительно этой оси:

Следовательно:
Проекция главного момента относительно данного центра на какую-нибудь ось, проходящую через этот центр, равна алгебраической сумме моментов всех сил данной системы относительно этой оси.
Сумма моментов сил данной системы относительно какой-нибудь оси называется главным моментом этой системы сил относительно этой оси.
Проекция главного момента системы сил относительно данного центра на какую-нибудь ось, проходящую через этот центр, равна главному моменту этой системы сил относительно той же оси.
Подставив в полученную систему формулы разложения моментов силы по координатным осям, получим:
Зная проекции вектора МО на координатные оси, можно найти модуль этого вектора:

Направляющие косинусы главного момента МО можно найти по формулам:

или
Так же как в случае плоской системы из равенства следует, что ни модуль, ни направление главного вектора не зависят от выбранного центра приведения. Т.о. главный вектор данной системы сил инвариантен по отношению к центру приведения.
Из
равенства
 следует, что главный момент свойством
инваринатности не обладает, так как
при изменении положения центра приведения
О моменты данных сил Fi
относительно этого центра, а следовательно,
и сумма моментов вообще будут изменяться.
следует, что главный момент свойством
инваринатности не обладает, так как
при изменении положения центра приведения
О моменты данных сил Fi
относительно этого центра, а следовательно,
и сумма моментов вообще будут изменяться.
Пусть
в результате приведения данной системы
сил Fi
(i=1,
2, …, n) к какому-нибудь центру О мы получим
силу, равную главному вектору R',
приложенную в центре О, и пару, момент
которой равен главному моменту МО
относительно этого центра (рис.8.4).
Причем
и
 .
.
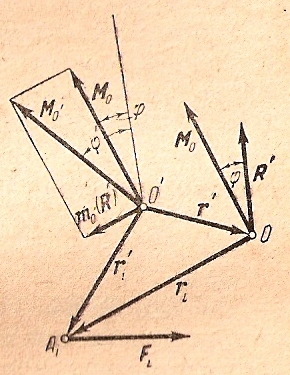 Рис.8.4.
Рис.8.4.
Примем
за центр приведения новую точку О'.
Пусть сила Fi
данной системы приложена в точке Аi.
Радиусы векторы этой точки, проведенные
из центров О и О', обозначим соответственно
через ri
и r'i.
Вектор
 обозначим через r'.
Тогда, из треугольника АiОО',
получим:
обозначим через r'.
Тогда, из треугольника АiОО',
получим:

Составляя
моменты сил Fi
относительно центров приведения О и
О', получим:
 ,
,

Складывая моменты всех сил Fi (i=1, 2, …, n) относительно нового центра приведения О', получим главный момент МО' данной системы сил относительно нового центра:

В
первом члене правой части равенства
можно вынести общий множитель r'
за знак суммы:
 -
векторное произведение
-
векторное произведение
 есть момент главного вектора R',
приложенного в точке О относительно
центра О'.
есть момент главного вектора R',
приложенного в точке О относительно
центра О'.
Следовательно:
 или
или

Изменение главного момента системы сил при перемене центра приведения равно моменту главного вектора этой системы, приложенного в прежнем центре приведения, относительно нового центра.
Так как момент силы R' относительно любой точки, лежащей на линии действия этой силы, равен нулю, то из полученного равенства следует, что
При перемещении центра приведения по прямой, имеющей направления главного вектора, главный момент системы сил остается постоянным.
Отсюда следует, что проекция главного момента данной системы сил относительно любого центра на направление главного вектора есть величина постоянная, не зависящая от выбора этого центра.

Скалярное произведение главного вектора и главного момента данной системы сил инвариантно по отношению к центру приведения.
Таким образом, для любой системы сил существуют два инварианта (величины не зависящие от выбора центра приведения):
Векторный инвариант системы сил – главный вектор этой системы
Скалярный инвариант системы сил – скалярное произведение главного вектора и главного момента этой системы.