

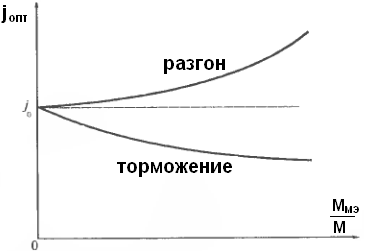
11 Оптимальное передаточное число редуктора
По минимуму времени переходного процесса:
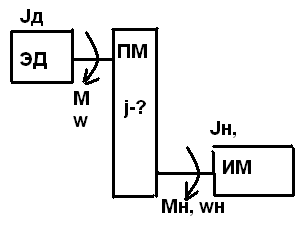
первый способ: (ЭД М=const, Jд=const) (Исполн-й мех-м Mн,wн,Jн)
+ торможение , - разгон
При оптимальном j и отсуствия момента нагрузки на валу, кинетическая энергия механизма = кинетической энергии ЭД вместе с редуктором
второй способ (ЭД P =const) (Исполн-й мех-м Mн,wн,Jн)
М=const;
М=Мном ;
;

12Оптимальное передаточное числопо критерию минимум габарита эд
угловое ускорение:
при
отсуствии нагрузки на выходном валу
фиктивный момент инее
рции

тогда
 следовательно
следовательно

15. Статическая устойчивость работы эп
 Под
статической устойчивостью понимают
способность электропривода возвращаться
в равновесное состояние после устранения
возмущающего воздействия. Статическая
устойчивость анализируется на основе
основного уравнения движения электропривода
Под
статической устойчивостью понимают
способность электропривода возвращаться
в равновесное состояние после устранения
возмущающего воздействия. Статическая
устойчивость анализируется на основе
основного уравнения движения электропривода
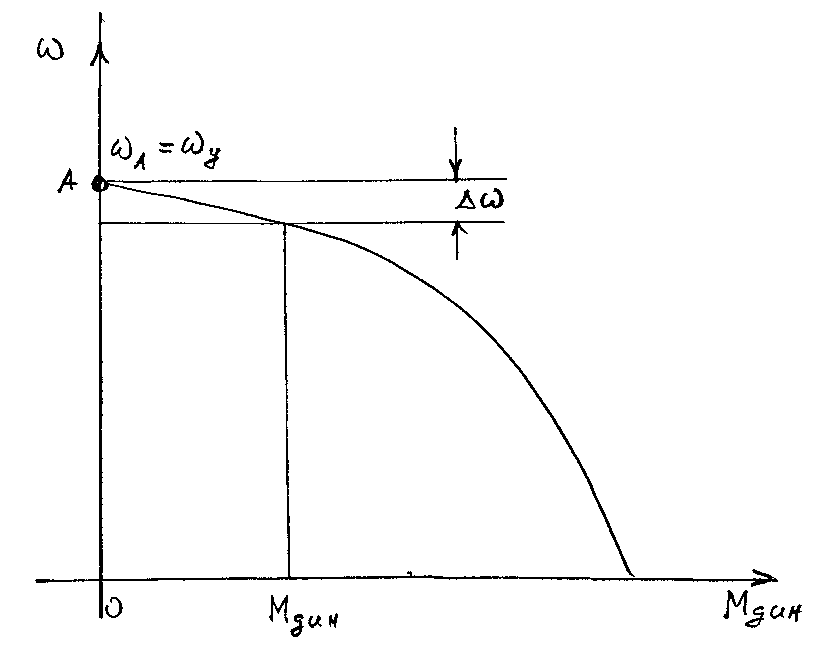
 при
малых отклонениях от равновесного
состояния (Рис.1.21).
при
малых отклонениях от равновесного
состояния (Рис.1.21).
В установившемся состоянии

При
небольшом отклонении
 скорости от равновесного состояния
динамический момент можно представить
линейной зависимостью
скорости от равновесного состояния
динамический момент можно представить
линейной зависимостью
 ,
где
,
где
 ,
а скорость как
,
а скорость как
 ,
,
 ,
интегрируя которое
,
интегрируя которое ,
,
 ,
,
Постоянную интегрирования С определяем из начальных условий:
при
t=0
 ,
тогда
,
тогда
 и
и
 ,
,
 ,
или
,
или
 ,
,
Чтобы
работа электропривода была устойчивой,
необходимо иметь
 при
при
 ,
а это возможно, если
,
а это возможно, если
 ,
т.е.
,
т.е.
 ,
,
где
 ,
,
 ,
,
 -
жесткость механической характеристики
электродвигателя в точке А;
-
жесткость механической характеристики
электродвигателя в точке А;
 -
жесткость механической характеристики
исполнительного механизма в точке А.
-
жесткость механической характеристики
исполнительного механизма в точке А.
Следовательно, для устойчивой работы электропривода необходимо, чтобы в точке равновесного состояния жесткость механической характеристики электродвигателя была меньше жесткости механической характеристики исполнительного механизма.
 Рассмотрим
некоторые частные случаи.
Рассмотрим
некоторые частные случаи.
1)
М=Const,
тогда
 или
или

2)
Мс=Const,
тогда

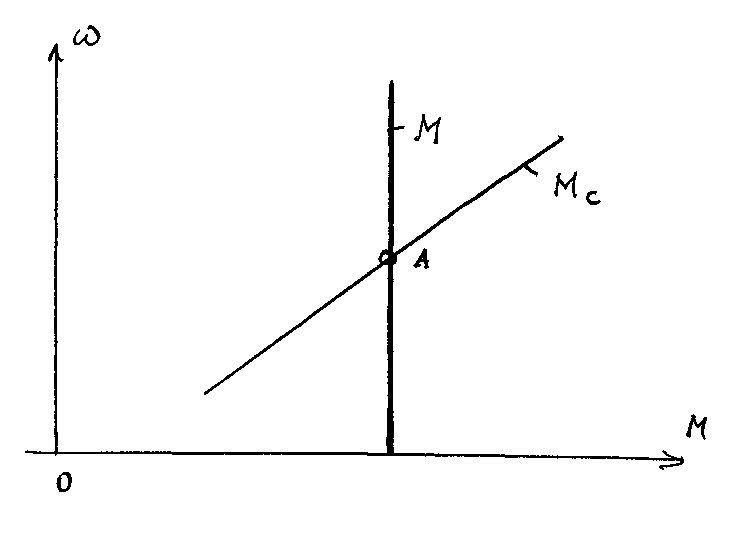
Так как для статической устойчивости необходимо иметь , то при отклонении скорости от точки равновесия в положительном направлении
 ,
,
 ,
,
Для механических характеристик, показанных на Рис.1.24а:
 ,
,
 ,
,
следовательно,
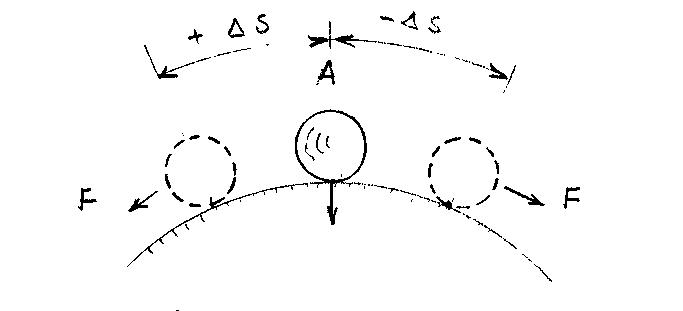
в точке А установившееся состояние
неустойчивое. Механическая модель
неустойчивого равновесия
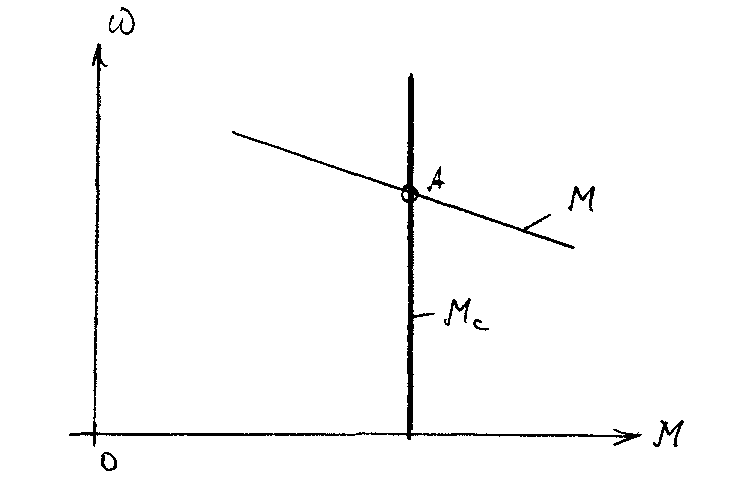
Установившееся состояние в точке А Рис.1.25а будет устойчивым, поскольку
 ,
,
 .
.
Механическая модель устойчивого равновесия приведена на Рис.1.25б.
16.Механические переходные процессы эп при линейном динамическом моменте
В общем случае линейный динамический момент можно представить
зависимостью Мдин = +. ,
где =Мдин (=0)=Мк М0 ,
 ,
,
Мк – момент электродвигателя при = 0,
Мс – статический момент при = 0,
– жесткость характеристики Мдин().
Примем, что линейный динамический момент образуется из линейного электромагнитного момента двигателя и линейного статического момента:
Mc=M0+cw
Тогда жесткости c и Д механической характеристики двигателя w(M) и статического момента Мс(w) будут постоянными величинами, причем возможны случаи, когда:
Тогда из основного уравнения ЭП:
+=J Тм =
Тм = ,
,
 ,
,
 ,
,
У – установившееся значение скорости , соответствующее Мдин = 0.
нач – начальное значение скорости в переходном процессе.



где МУ – электромагнитный момент двигателя, соответствующий скорости wУ.

Как видно из изложенного, постоянная TM может быть положительной или отрицательной в зависимости от знака жесткости динамического момента. Но в общепринятой практике ее принимают как положительную величину, тогда:
а) для >0

а) для <0


Если МС=const, то с=0, Д=0, wУ=0, MУ=МС
Практически принимаем время переходного процесса принимают:
tП.П.=(34)TM, что соответствует достижению скорости =(0,95+0,98)У