

13 Учет потерь в передаче.
Потери энергии (мощности) в передаче учитывают двумя способами:
1) приближенным, т.е. с помощью КПД и 2) уточненным, т.е. непосредственным вычислением составляющих потерь. Рассмотрим эти способы.
А. Учет потерь в передачах с помощью КПД.
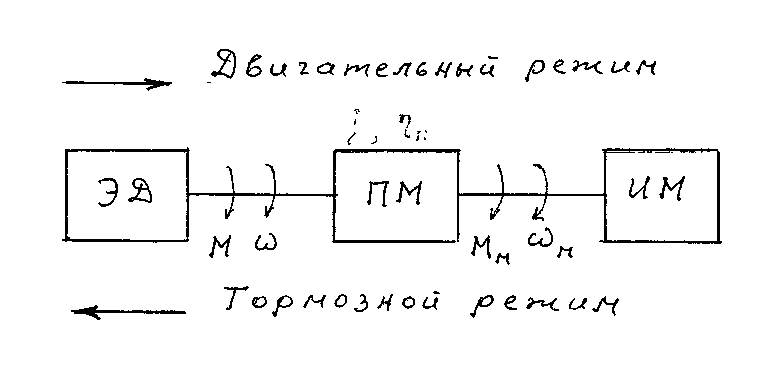
Механическая
часть электропривода (рис.1.17) включает
ротор электродвигателя ЭД с угловой
скоростью w
и моментом М, передаточный механизм ПМ,
имеющий КПД
hп
и передаточное число j,
и исполнительный механизм ИМ, на валу
которого приложен момент Мм
и скорость вала wм.
Для наглядности обозначим статический
момент в двигательном режиме
 ,
а в тормозном - .
,
а в тормозном - .![]() Для двигательного режима работы, исходя
из закона сохранения энергии, можно
записать равенство
Для двигательного режима работы, исходя
из закона сохранения энергии, можно
записать равенство
 ,
,
 ,
где
,
где
 ,
,
 - момент механизма, приведенный к валу
электродвигателя.
- момент механизма, приведенный к валу
электродвигателя.
Для тормозного режима будем иметь такое равенство
 ,
,
 ,
,
Но
КПД
 является переменной величиной, зависящей
от постоянных и переменных потерь в
передаче. Определим потерю момента в
передаче для двигательного режима
является переменной величиной, зависящей
от постоянных и переменных потерь в
передаче. Определим потерю момента в
передаче для двигательного режима
 ,
,
Примем допущение, что в тормозном режиме будет такая же потеря момента. Тогда статический момент в тормозном режиме можно записать в таком виде:

1)
 ,
тогда
,
тогда
 ,
что соответствует тормозному режиму,
когда двигатель развивает тормозной
момент. Применительно к грузоподъемному
механизму это будет опускание тяжелого
груза, когда момент от действия груза
на валу двигателя Мг
превышает момент потерь М
в передаче. Получаем так называемый
тормозной спуск;
,
что соответствует тормозному режиму,
когда двигатель развивает тормозной
момент. Применительно к грузоподъемному
механизму это будет опускание тяжелого
груза, когда момент от действия груза
на валу двигателя Мг
превышает момент потерь М
в передаче. Получаем так называемый
тормозной спуск;
2)
 ,
тогда
,
тогда
 ,
что соответствует не тормозному, значит,
двигательному режиму. Для грузоподъемного
механизма это эквивалентно опусканию
крюка, когда момент от его веса на валу
двигателя МК
меньше момента потерь М
в передаче. Имеем так называемый силовой
спуск.
,
что соответствует не тормозному, значит,
двигательному режиму. Для грузоподъемного
механизма это эквивалентно опусканию
крюка, когда момент от его веса на валу
двигателя МК
меньше момента потерь М
в передаче. Имеем так называемый силовой
спуск.
Потери момента в передаче приближенно выражаются через две составляющие, одна из которой для данной передачи является постоянной величиной, а вторая – пропорциональна передаваемому моменту:
 ,
,
где
 –
коэффициент постоянных потерь;
–
коэффициент постоянных потерь;
b – коэффициент переменных потерь;
Мс.ном – номинальный статический момент передачи;
Мперед – передаваемый момент, который равен моменту на выходном (по направлению передачи энергии) валу передачи.
Для
установившегося двигательного режима
 .
КПД передачи можно представить отношением
мощностей в установившемся режиме:
.
КПД передачи можно представить отношением
мощностей в установившемся режиме:
 ,
,
где
 ,
,
 ,
,
P2 – мощность на выходном валу ПМ в установившемся двигательном режиме;
P – потери мощности в передаче.
 ,
Обозначим
,
Обозначим
 ,
,
 ,
,
При номинальной нагрузке КЗ=1 и
 ,
,
 ,
,
Таким образом, КПД передачи является функцией коэффициента загрузки и номинального КПД, так как коэффициент постоянных потерь зависит от номинального КПД и для ряда передач приводится в справочниках.
14. Уточненный метод учета потерь в передаче.
Рассмотрим сначала установившийся режим работы. Для двигательного установившегося режима имеем:
,
 ,
,
Для тормозного установившегося режима (см. Рис.1.17):

 ,
,
 ,
,
откуда
 ,
,
Теперь перейдем к переходным режимам. Для двигательного режима в переходном процессе (разгон)
 ,
,

 ,
находим
,
находим
 ,
,
где

 ,
,
 -
коэффициент, учитывающий момент инерции
передаточного механизма;
-
коэффициент, учитывающий момент инерции
передаточного механизма;
 -
момент инерции ротора электродвигателя;
-
момент инерции ротора электродвигателя;
 -
эквивалентный статический момент при
разгоне электропривода;
-
эквивалентный статический момент при
разгоне электропривода;
 -
эквивалентный момент инерции при разгоне
электропривода.
-
эквивалентный момент инерции при разгоне
электропривода.
Для тормозного режима в переходном процессе
 ,
,
где М – момент электродвигателя в переходном процессе,
 ,
,
 ,
,
находим
 ,
где
,
где
 ,
,
 -
эквивалентный статический момент при
торможении электропривода;
-
эквивалентный статический момент при
торможении электропривода;
 -
эквивалентный момент инерции при
торможении электропривода.
-
эквивалентный момент инерции при
торможении электропривода.
Заметим, что эквивалентные статические моменты при разгоне и торможении электропривода равны статическим моментам для установившихся двигательного и тормозного режимов. Самое важное состоит в том, что непосредственный учет потерь в передаче привел к тому, что эквивалентный момент инерции при разгоне электропривода стал больше, а при торможении меньше суммарного момента инерции электропривода. Получилось, что инерционность электропривода зависит, при прочих неизменных условиях, от режима работы.
Сложность непосредственного расчета потерь в передаче состоит в том, что необходимо иметь значения коэффициентов и b.