

37. Модель дпт нв в осях и её уравнения
Модель обобщенной электрической машины в осях 1α-1β, 2d-2q включает в себя все частные модели электрических машин. Модель ДПТ НВ получается из этой модели с помощью следующих изменений:
Обмотка статора по оси 1β включается на постоянное напряжение, а обмотка статора по оси 1α не используется;
Обмотки фаз 2d, 2q питаются переменными токами i2d, i2q от преобразователя частоты ПЧ, осуществляющего коммутацию тока в функции электрического угла φЭЛ поворота ротора с угловой частотой ωЭЛ, где сигнал φЭЛ поступает от датчика положения ротора ДПР (рис.3.6).
Если ПЧ – вентильный преобразователь частоты коммутируемый с помощью ДПР, то эта модель соответствует модели вентильного (электроннокоммутируемого) двигателя. Если же ПЧ – механический коммутатор, т.е. коллектор со щетками, то рис. 3.1 представляет собой модель коллекторного двигателя постоянного тока.
Для
двухфазной модели обобщенной электрической
машины в осях 1α-1β, 2d-2q
была получена формула (2.25) мгновенного
значения электромагнитного момента

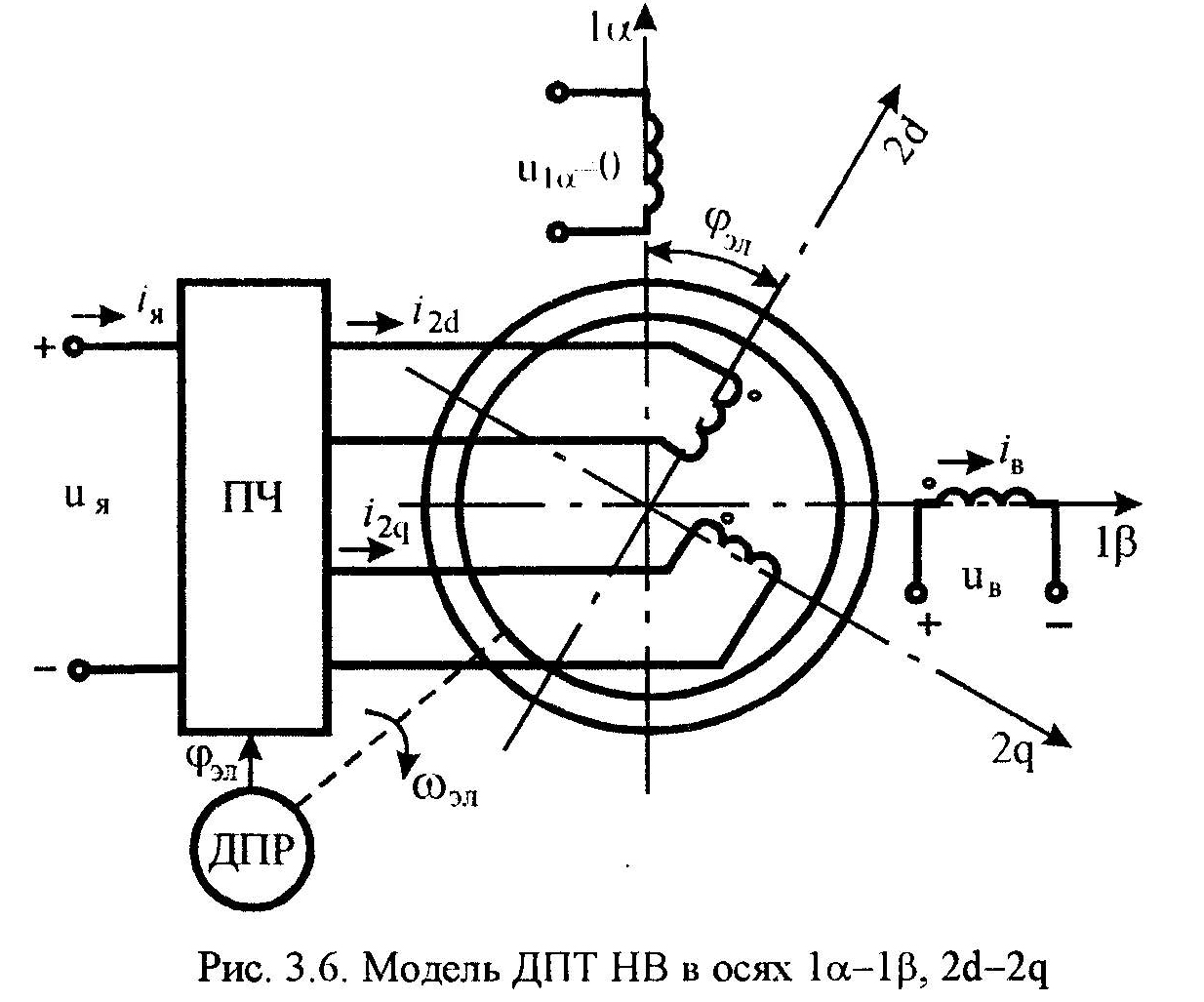
В представленной на рис. 3.6 модели ДПТ НВ U1α=0, i1α=0, поэтому
 (3.5)
(3.5)
Для непрерывного преобразования энергии электродвигателем необходимо, чтобы электромагнитный момент (3.5) не зависел от положения ротора, т.е. от φЭЛ. Это возможно, если
 (3.6)
(3.6)
тогда
 (3.7)
(3.7)
Преобразуем токи ротора i2d, i2q к неподвижным осям α-β, используя общие формулы (2.50) прямого преобразования переменных ротора:
 (3.8)
(3.8)
где ΔφК=φК-φЭЛ=(ωК-ωЭЛ)t
Для неподвижных осей α-β имеем ωК=0 и
ΔφК=-ωЭЛt=-φЭЛ (3.9)
тогда с учетом (3.6) и (3.9) имеем
 (3.10)
(3.10)
т.е. i2α=iЯ и i2q=0.
Следовательно, две обмотки ротора, находящиеся на осях 2d-2q, при преобразовании к осям статора дают одну обмотку, оп которой протекает постоянный ток iя.
38. Математическая модель дпт нв и структурная схема дпт нв в осях
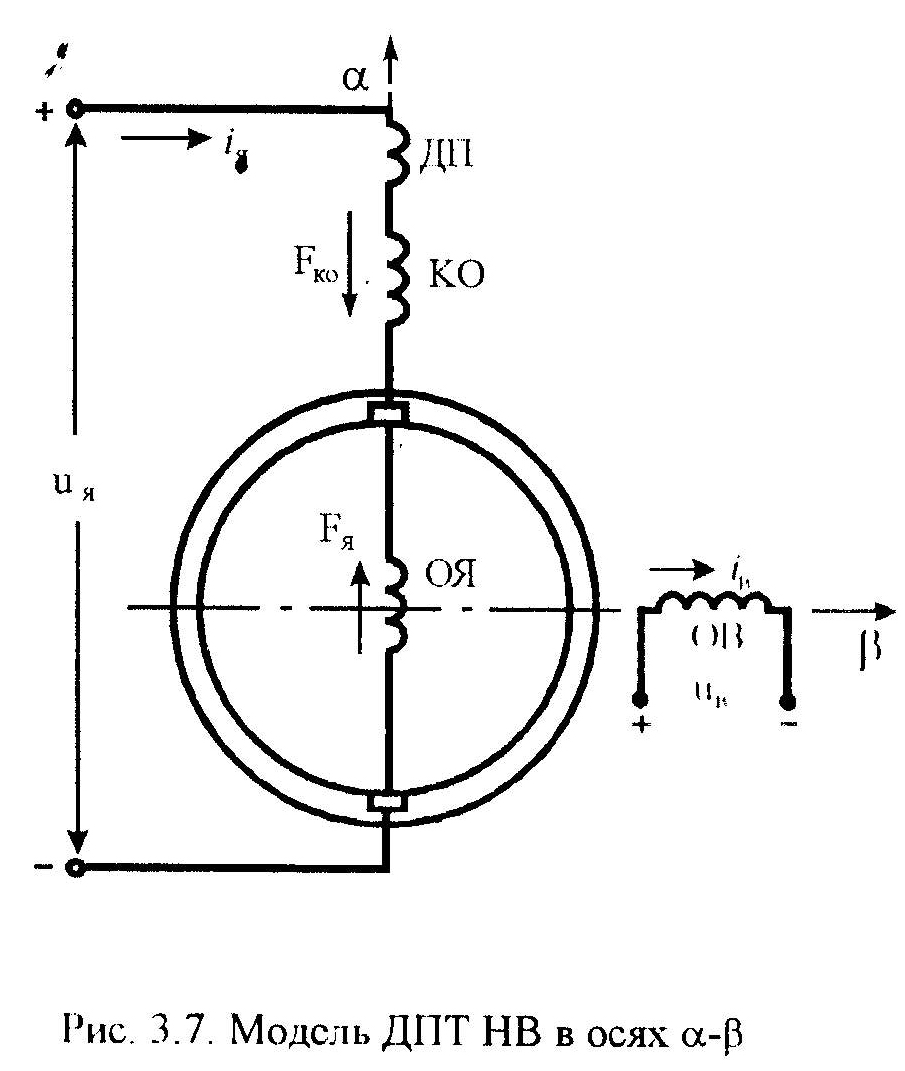

Уравнение обобщенной электрической машины в осях α-β применительно к условиям ДПТ НВ:
 (3.12)
(3.12)
Имеют вид
 (3.13)
(3.13)
Учитывая, что
 (3.14)
пол-ем
(3.14)
пол-ем
 (3.15)
(3.15)
Изменяя обозначения переменных обобщенной электрической машины в осях α-β на привычное обозначение переменных ДПТ НВ:
 (3.16)
то
(3.16)
то
 (3.17)
(3.17)
Обозначим:
 (3.18)
(3.18)
 (3.19)
(3.19)
где е – ЭДС вращения ДПТ НВ,
Ф – магнитный поток взаимоиндукции,
k – конструктивный коэффициент определяемый как
 (3.20)
(3.20)
N – число активных проводников обмотки якоря,
а – число пар параллельных ветвей обмотки.
На основании (3.19) имеем
 (3.21)
(3.21)
где
 (3.22)
(3.22)
LФ – эквивалентная индуктивность, определяющая связь между магнитным потоком взаимоиндукции и током возбуждения электрической машины.Величину LФ можно определить из кривой намагничивания электрической машины (рис. 3.9).

Теперь систему уравнений (3.17) можно записать в виде:
 (3.23)
(3.23)
Выразим
 (3.24)
(3.24)
и подставим в первое уравнение (3.23):
 (3.25)
(3.25)
Обозначим
 (3.26)
(3.26)
 (3.27)
(3.27)
тогда (3.23) можно представить в таком виде
 (3.28)
(3.28)
где ТВ – электромагнитная постоянная времени цепи возбуждения ДПТ НВ,
ТЯ – электромагнитная постоянная времени якорной цепи.
Систему уравнений (3.28) запишем в операторной форме
 (3.29)
(3.29)