

47. Тормозные режимы работы дпт пв
ДПТ ПВ допускает работу в режиме противовключения и динамического торможения. Рекуперативное торможение невозможно, так как характеристика двигателя при любых скоростях не пересекает ось и ЭДС двигателя в нормальной схеме включения не может быть больше приложенного напряжения.
Торможение противовключением может быть как при активном, так и при реактивном статическом моменте. Основные особенности этого режима такие же как и для ДПТ НВ. При активном статическом моменте режим противовключения используется для получения посадочных скоростей при опускании тяжелых грузов
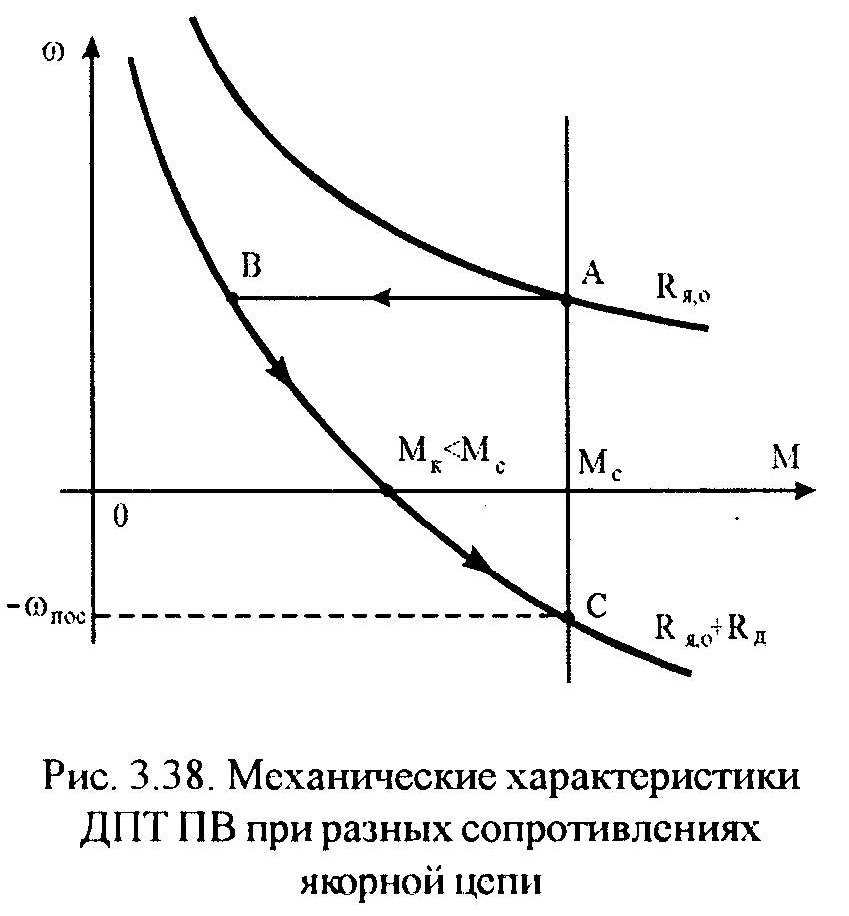
Торможение противовключением осуществляется также изменением направления тока в якоре с одновременным включением в цепь якоря сопротивления RД для ограничения броска тока.
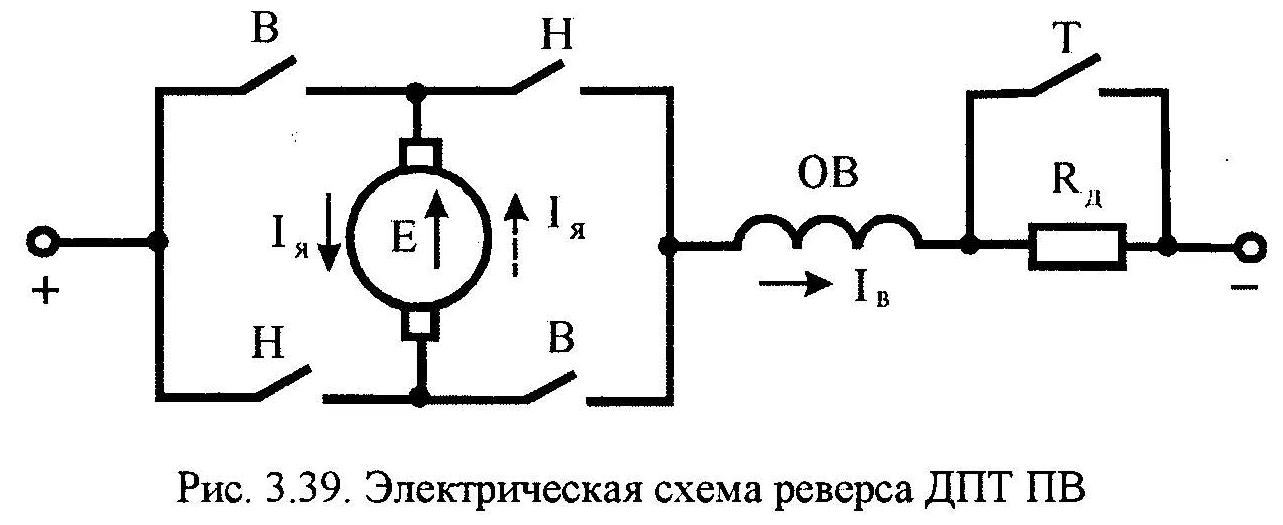
Направление тока в обмотке возбуждения сохраняется прежним. На интервале ВС механической характеристики реализуется режим противовлкючения
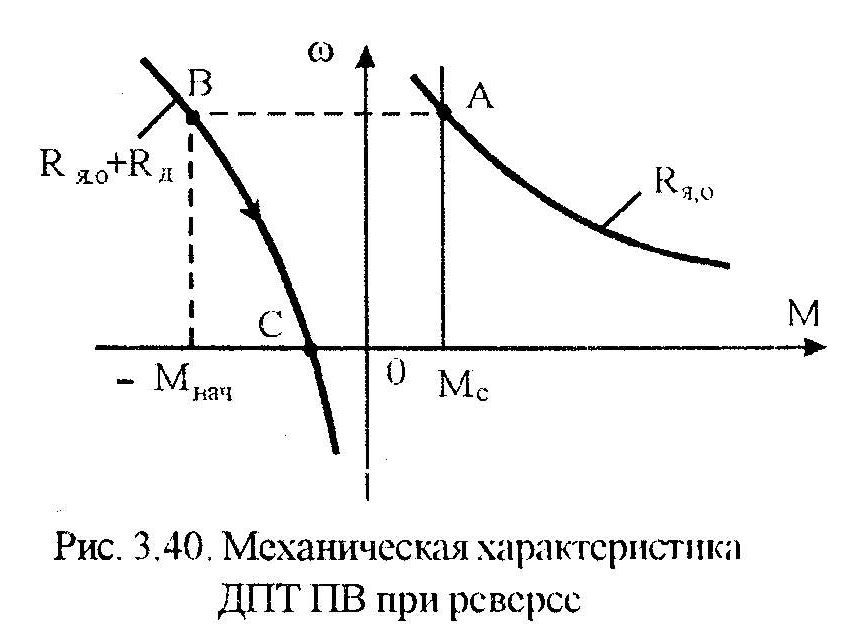
Данный способ торможения применяется для быстрой остановки реверсируемых электродвигателей.
Динамическое торможение может осуществляться двумя способами:
при независимом возбуждении;
при самовозбуждении.
Рассмотрим динамическое торможение при независимом возбуждении (рис.3.41).
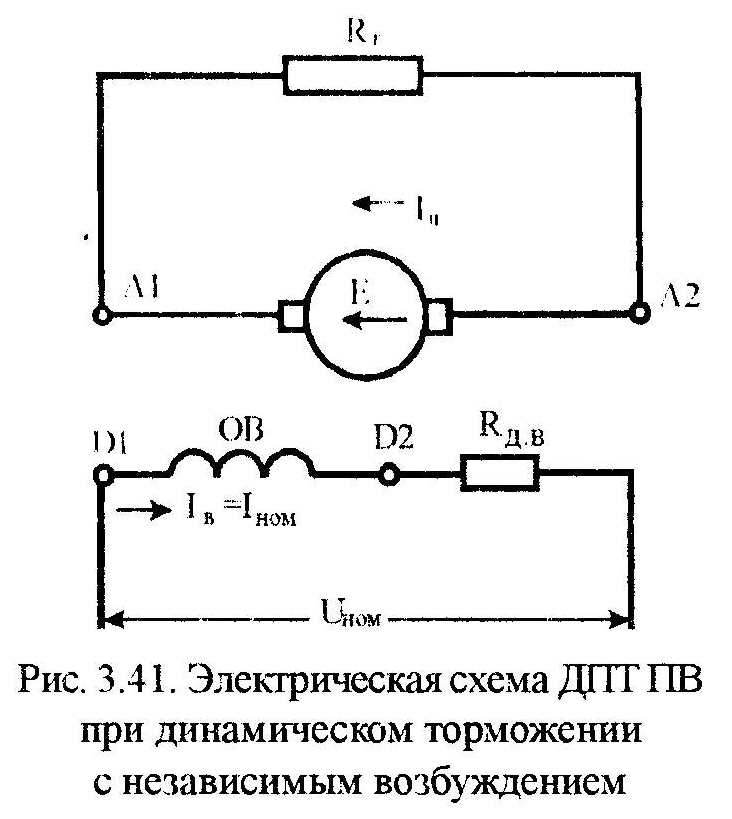
В этом случае обмотка возбуждения ОВ соединяется последовательно с добавочным сопротивлением RД ,В , которое выбирается таким, чтобы обеспечить номинальный магнитный поток Фном. Необходимая величина добавочного сопротивления вычисляется таким образом
Вследствие того, что магнитный поток постоянный, тормозные характеристики ДПТ ПВ полностью аналогичны характеристикам динамического торможения ДПТ ПВ
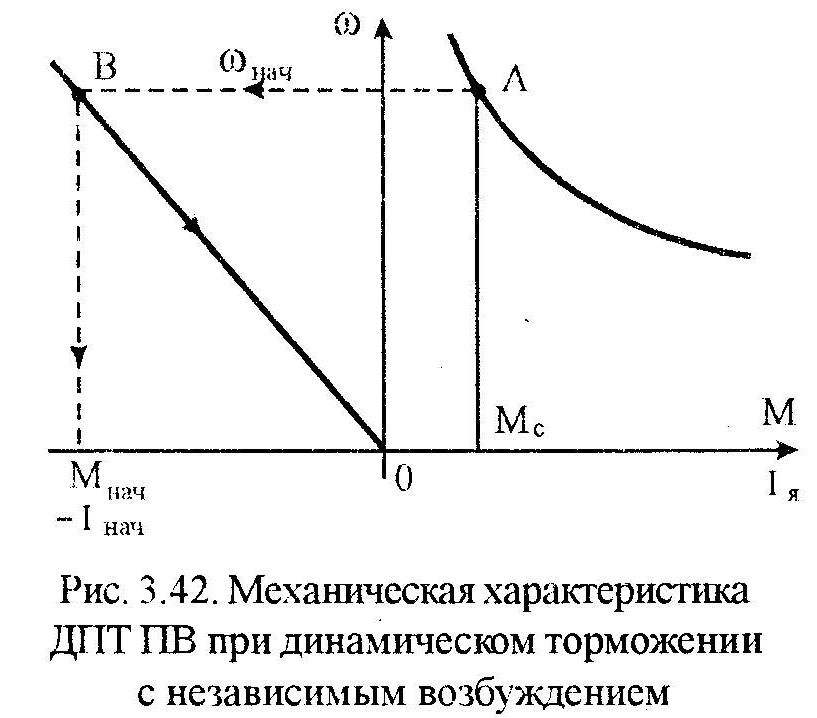
Величина тормозного сопротивления Rт якорной цепи рассчитывается из заданной величины начального значения Iнач ток якоря:
 где
где

Енач , нач – начальные ЭДС и угловая скорость.
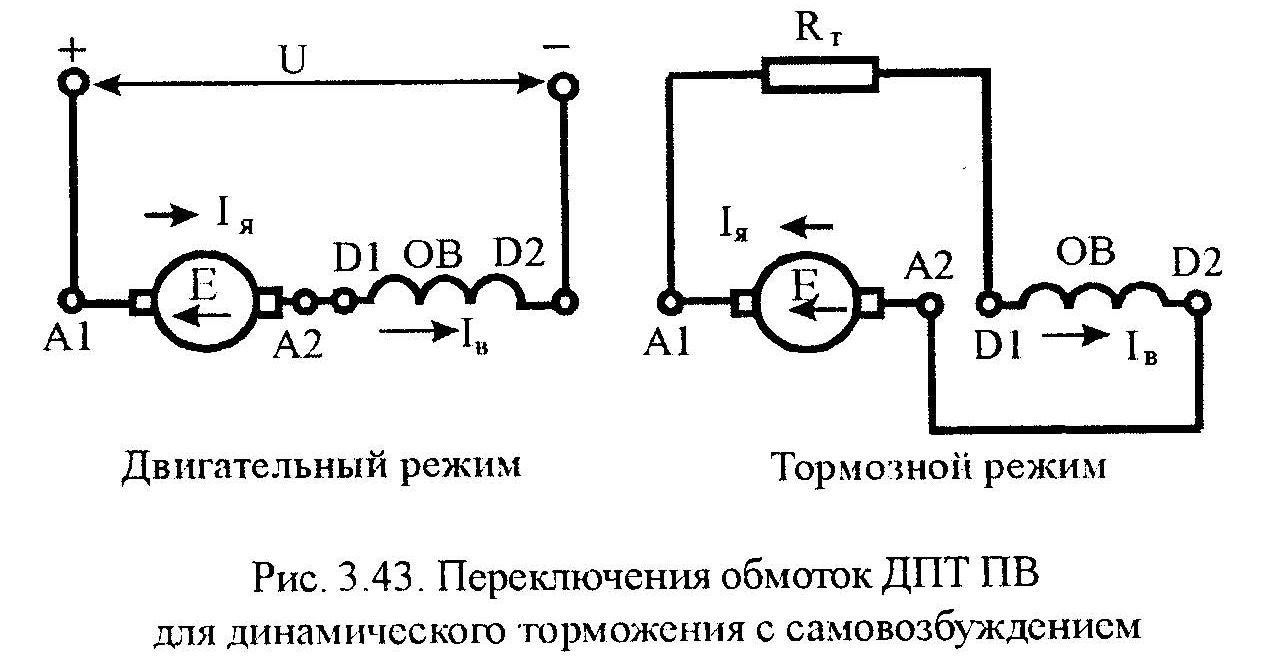
Теперь проанализируем динамическое торможение с самовозбуждением. Для того, чтобы остаточный магнитный поток и рабочий магнитный поток совпадали по направлению, необходимо, чтобы ток в обмотке возбуждения протекал в том же направлении, что и в предшествующем двигательном режиме. Для сохранения прежнего направления тока в обмотке возбуждения концы ее при переходе в тормозной режим следует переключить
Работа машины постоянного тока с самовозбуждением возможна при таких значениях скорости и сопротивления Rя якорной цепи, чтобы при наличии остаточного магнитного потока выполнялось условие

Графически это означает, что кривая E=F(Iя) и прямая IяRя=F(Iя) пересекаются
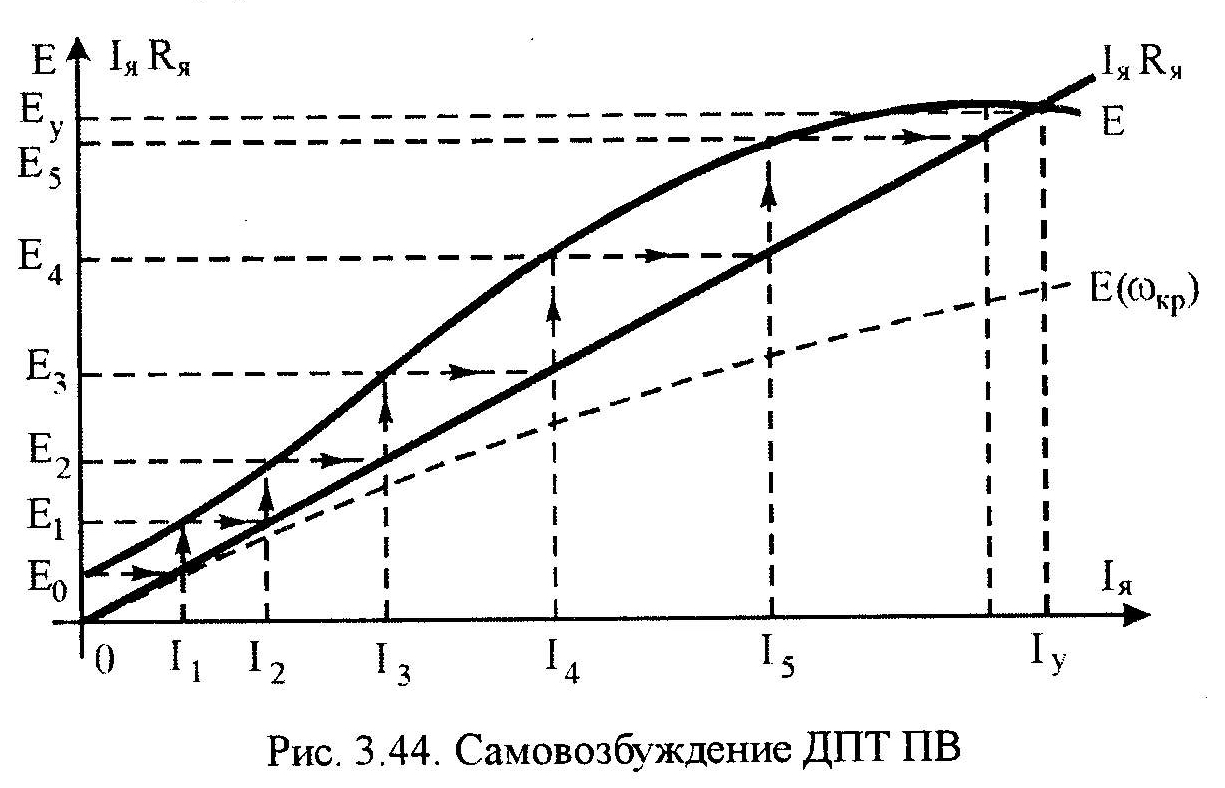
Чем больше Rя , тем при большей скорости произойдет самовозбуждении машины. Наименьшая скорость при данном Rя , при которой еще возможно самовозбуждение, называется критической (кр). При этих условиях прямая IяRя касается кривой Е=F(Iя).
Расчет механической характеристики динамического торможения с самовозбуждением при данном Rт производится следующим образом. Для каждого значения тока Iя на естественной и искусственной характеристиках определяется ЭДС:


По
формуле

рассчитывается скорость на тормозной характеристике и электромагнитный момент при данном токе:
Совокупность
точек
 позволяет построить механическую
характеристику при динамическом
торможении с самовозбуждением
позволяет построить механическую
характеристику при динамическом
торможении с самовозбуждением
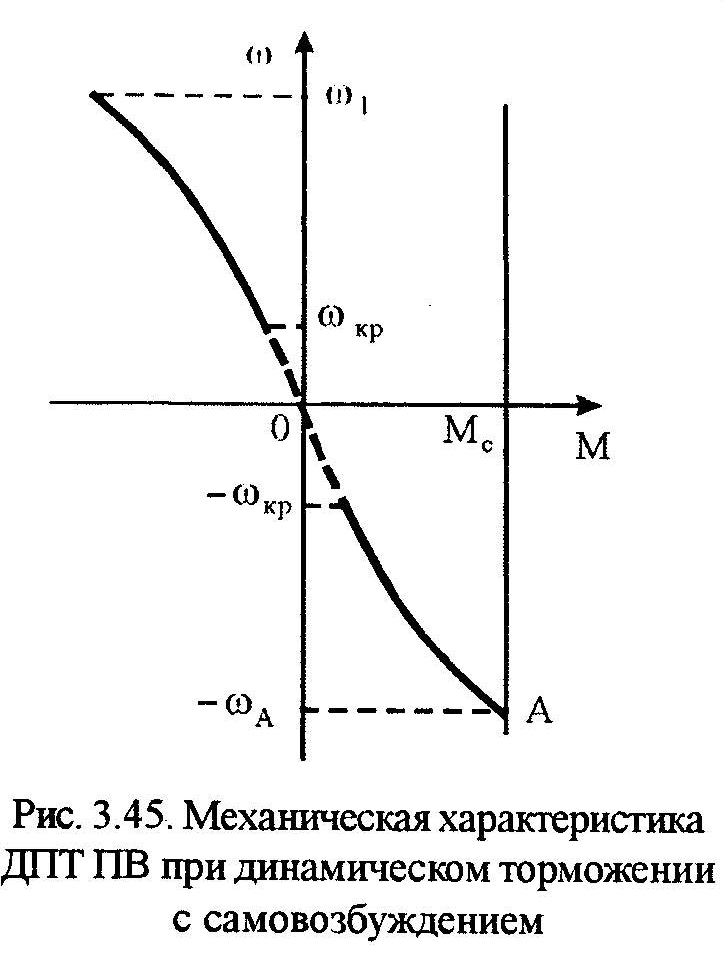
Тормозной режим с самовозбуждением имеет следующие особенности:
самовозбуждение возможно лишь начиная с некоторой минимальной скорости (кр),
при снижении скорости тормозной момент резко уменьшается из-за одновременного уменьшения тока и магнитного потока,
по мере самовозбуждения (особенно при активном статическом моменте) тормозной момент быстро нарастает, что может вызвать опасный динамический удар,
динамическое торможение с самовозбуждением возможно при полном отключении питающей сети, поэтому оно применяется в качестве аварийного.