

33. Эквивалентная схема оэм в осях X-y для установившегося режима работы
Принимаем переменные величины ОЭМ синусоидальными, тогда для установившегося режима работы имеем равенства
 ,
,
где
 - комплексные векторы синусоидальных
потокосцеплений статора и ротора.
- комплексные векторы синусоидальных
потокосцеплений статора и ротора.
Для установившегося режима работы комплексно-векторные уравнения (2.142)
принимают вид:
 ,
,
где
 - комплексные векторы напряжений и токов
статора и ротора ОЭМ.
- комплексные векторы напряжений и токов
статора и ротора ОЭМ.
Отношение
 ,
(2.147)
,
(2.147)
представляет
собой скольжение относительно синхронной
угловой скорости
 .
Поэтому уравнения электрического
равновесия совместно с уравнениями
потокосцеплений можно записать таким
образом:
.
Поэтому уравнения электрического
равновесия совместно с уравнениями
потокосцеплений можно записать таким
образом:
 ,
(2.148)
,
(2.148)
При синусоидальных переменных удобнее перейти от амплитудных к действующим значениям:
В результате получаем уравнения:
 ,
(2.149)
,
(2.149)
Полагая
 ,
разделим второе уравнение (2.149) на
,
разделим второе уравнение (2.149) на
 ,
в результате получаем
,
в результате получаем
, (2.150)
Уравнения
(2.150) отличаются от уравнений (2.149) тем,
что они описывают процессы при
остановленном роторе ( ),
а это значит, что частота переменных
ротора и статора одинакова. Инвариантность
этого преобразования соблюдается, так
как с остановкой ротора электромагнитная
энергия не исчезла, а превратилась в
эквивалентную энергию, которая выделяется
в виде тепла на сопротивлении
),
а это значит, что частота переменных
ротора и статора одинакова. Инвариантность
этого преобразования соблюдается, так
как с остановкой ротора электромагнитная
энергия не исчезла, а превратилась в
эквивалентную энергию, которая выделяется
в виде тепла на сопротивлении
 .
.
Для удобства приведем параметры роторной цепи к параметрам статорной цепи, тогда
 ,
(2.151)
,
(2.151)
где
 - комплекс намагничивающего тока ОЭМ.
- комплекс намагничивающего тока ОЭМ.
Уравнения электрического равновесия (2.150) принимают вид:
 ,
(2.152)
,
(2.152)
Поскольку
 ,
(2.153)
,
(2.153)
то
 ,
(2.154)
,
(2.154)
где
 - индуктивные сопротивления рассеяния
статора, ротора (приведенное) и
намагничивающего контура.
- индуктивные сопротивления рассеяния
статора, ротора (приведенное) и
намагничивающего контура.
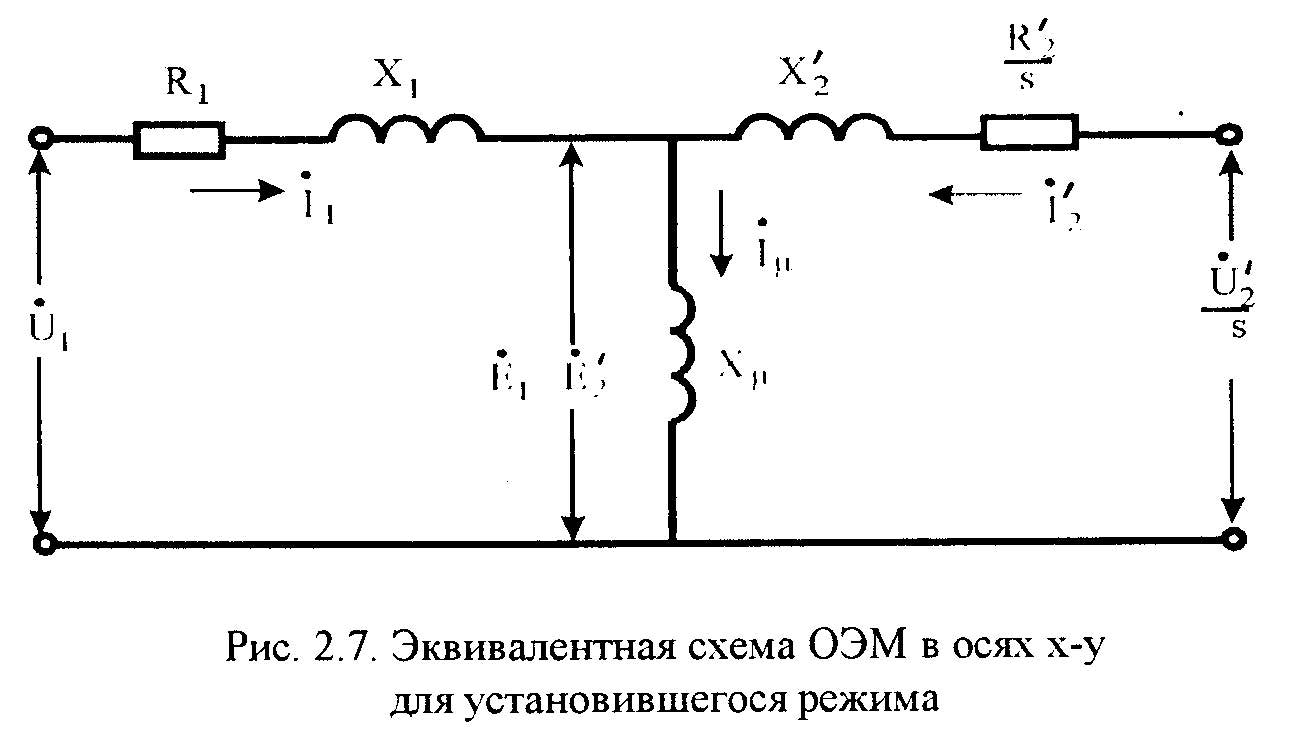
Уравнениям (2.154) соответствует эквивалентная схема ОЭМ, показанная на Рис.2.7, причем
 (2.155)
(2.155)
 -
комплекс ЭДС, индуктированной
потокосцеплением взаимоиндукции.
-
комплекс ЭДС, индуктированной
потокосцеплением взаимоиндукции.
34. Фазные преобразования переменных
В связи с тем, что большинство электрических машин переменного тока выполняется трехфазными, возникает задача преобразования переменных (напряжений, токов, потокосцеплений) реальной трехфазной машины в переменные двухфазной обобщенной машины. Необходимо также производить и обратные преобразования переменных двухфазной машины в переменные трехфазной машины. При этом все преобразования должны быть инвариантными по мощности.
Рассмотрим
сначала преобразование переменных
 трехфазной электрической машины в
переменные
трехфазной электрической машины в
переменные
 двухфазной обобщенной машины. Будем
полагать, что переменные
и
двухфазной обобщенной машины. Будем
полагать, что переменные
и
 пропорциональны переменным
пропорциональны переменным
 и
и
 соответственно. Обозначим коэффициент
пропорциональности
соответственно. Обозначим коэффициент
пропорциональности
 .
.
Переменные
по осям
 и
и
 могут иметь любую величину, соответственно
и по осям
могут иметь любую величину, соответственно
и по осям
 .
.
Совместим
ось
 обмотки статора с осью
обмотки статора с осью
 (Рис.2.8). Отметим углы оси
по отношению к осям
(Рис.2.8). Отметим углы оси
по отношению к осям
 :
:
 и углы оси
и углы оси
 по отношению к осям
:
по отношению к осям
:
 .
.
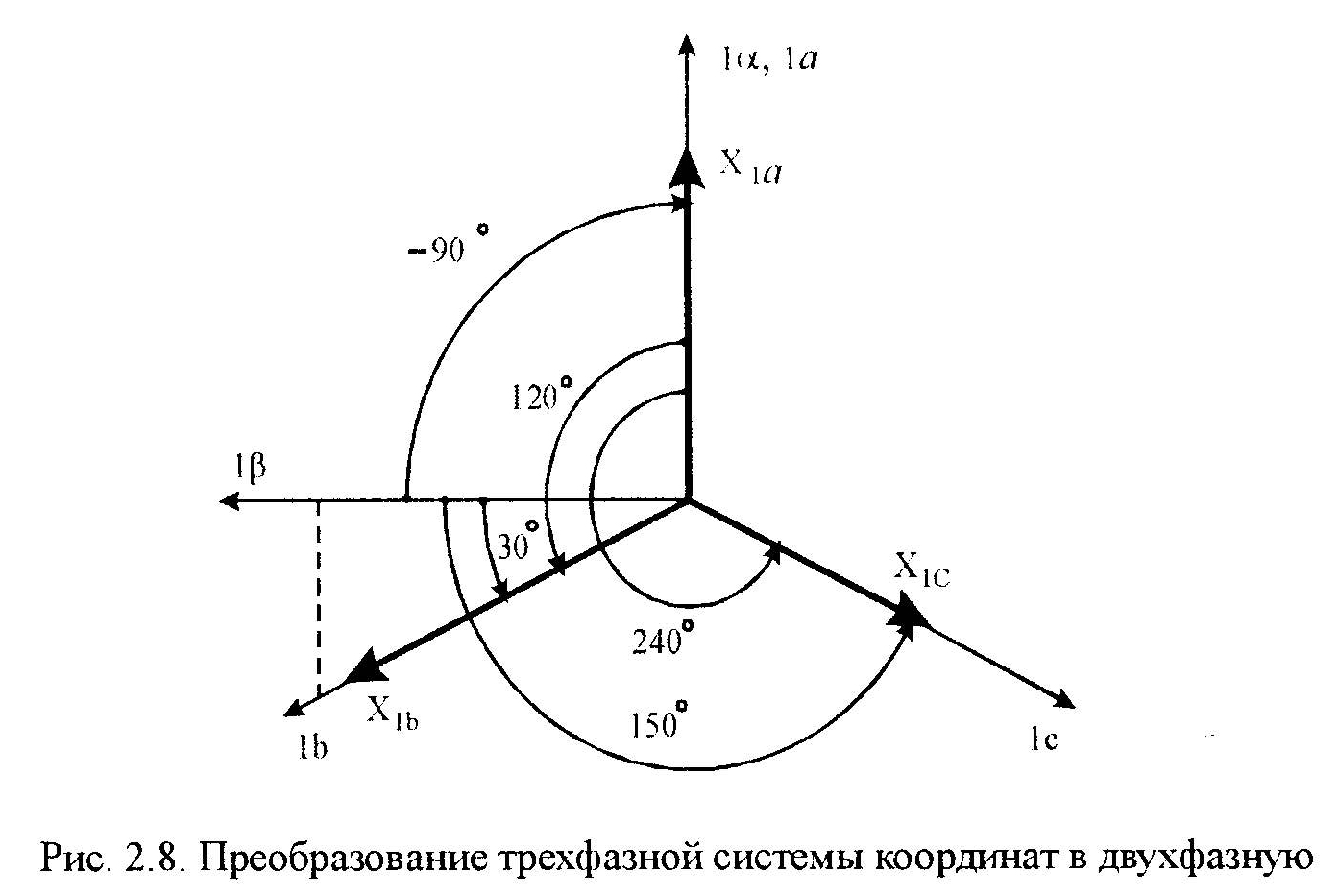
В результате можем составить матрицу поворота трехфазных осей к двухфазным:
 ,
(2.156)
,
(2.156)
Теперь
переменные
 статора двухфазной системы можно
выразить через переменные
статора двухфазной системы можно
выразить через переменные
 трехфазной системы:
трехфазной системы:
 (2.157)
(2.157)
где
 ,
(2.158)
,
(2.158)