

1.4. Функционалы, зависящие от нескольких функций
В более сложных задачах встречаются функционалы, зависящие от нескольких функций и их первых производных:

при заданных граничных условиях для всех функций.
Первая вариация экстремума функционала имеет вид:

Необходимым условием экстремума функционала является обращение в нуль его первой вариации. Учитывая независимость приращений hi и, варьируя по очереди каждую из функций при фиксированных остальных, приходим к системе уравнений ЭйлераЛагранжа:
![]()
Второе необходимое условие минимума функционала имеет вид:
![]()
для
любых допустимых приращений hi,
где
 ;
;
 ;
;![]() ;
;
![]() .
.
1.5. Функционалы, зависящие от старших производных
Рассмотрим необходимые условия экстремума функционала:

Рассматриваются функционалы, где F – непрерывная функция, дифференцируемая n+2 раза по всем аргументам. В качестве допустимых используются функции y(x), дифференцируемые 2n раз, а в граничных точках задаются значения самой функции и её производных до (n-1) включительно, то есть:
![]() .
.
С помощью рассуждений, аналогичных тем, которые были использованы при выводе уравнения Эйлера (равенство нулю первой вариации), можно получить необходимое условие экстремума функционала:
![]() (1.41)
(1.41)
Уравнение (1.41) называется уравнением Эйлера-Пуассона. Это уравнение является дифференциальным уравнением порядка 2n. Его общее решение содержит 2n произвольных постоянных для использования, которых необходимо 2n граничных условий.
Рассмотрим пример применения уравнения Эйлера-Пуассона для определения оптимального процесса, при котором минимизируется расход энергии на управление.
Пример 1.4. Минимизировать расход энергии на управление астатическим объектом из двух интегрирующих звеньев:
![]() (1.42)
(1.42)
Здесь x(t) – управляемая переменная, являющаяся искомой функцией, на которой функционал достигает экстремума; U(t) – управление (управляющее входное воздействие); Tu – постоянная интегрирования. Примем Tu=1.
Заданы граничные условия:
при
времени t=0: ![]() ;
;
при
конечном времени t=T:
![]() .
.
Требуется найти такую траекторию движения x(t) и закон управления U(t), при котором минимизируется функционал:
![]() или с учётом (1.42):
или с учётом (1.42):
![]() (1.43)
(1.43)
Подынтегральная функция F зависит только от второй производной искомой функции x(t):
![]() (1.44)
(1.44)
Для данного примера уравнение Эйлера-Пуассона примет вид:
![]() (1.45)
(1.45)
С учётом (1.44) получим:
![]()
Подставим полученные выражения в (1.45) и дважды продифференцируем по аргументу времени t:
![]()
Интегрируя это выражение два раза, определяем оптимальный закон изменения управляющего воздействия:
![]() (1.46)
(1.46)
Чтобы найти оптимальную траекторию движения x(t) проинтегрируем (1.46) ещё два раза. В результате получим:
![]()
Постоянные
интегрирования С1
![]() С4
определяются из граничных условий.
С4
определяются из граничных условий.
Проверяем выполнение условия Лежандра:
![]() .
.
Следовательно, на найденной экстремали x(t) реализуется минимум функционала (1.43).
Для рассмотренного объекта второго порядка оптимальный закон управления (1.46) получается линейным (рис. 1.6).
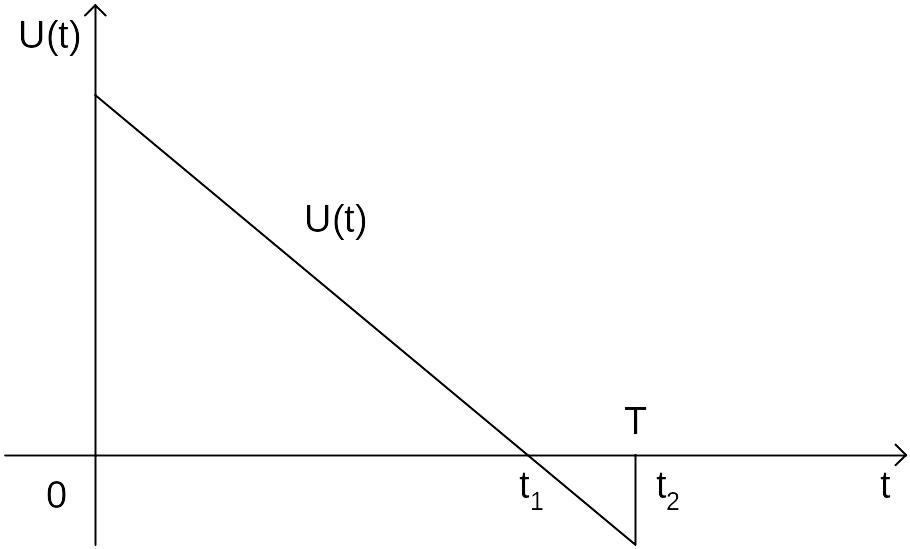
Рис. 1.6. Геометрическая трактовка найденного закона управления, минимизирующий расход энергии.