

23) Расчетное определение параметров схемы замещения трансформатора
Параметры схемы замещения могут быть определены расчетным или опытным путем.
Активные сопротивления обмоток легко рассчитываются по обмоточным данным, если известны коэффициенты вытеснения тока, учитывающие увеличение активных сопротивлений под влиянием Рис. 14-6. Упрощенная схема замещения трансформатора
![]()
Опыты холостого хода и короткого замыкания
Цель опытов. Опыты холостого хода и короткого замыкания проводятся для определения коэффициента трансформации, потерь в трансформаторе и параметров схемы замещения.
Опыт
холостого хода.
Для однофазного трансформатора опыт
холостого хода выполняется по схеме
рис. 2.11. К первичной обмотке подводится
номинальное напряжение
![]() ,
к вторичной — подключен вольтметр
,
к вторичной — подключен вольтметр
![]() ,
имеющий достаточно б
,
имеющий достаточно б ольшое
сопротивление. Практически можно
считать, что ток
ольшое
сопротивление. Практически можно
считать, что ток
![]() .
.
Кроме
того, в схему включены амперметр
![]() ,
вольтметр
,
вольтметр
![]() и
ваттметр
и
ваттметр
![]() .
Амперметр показывает ток холостого
хода
.
Амперметр показывает ток холостого
хода
![]() ,
вольтметр
—
номинальное
напряжение первичной обмотки
,
вольтметр
—напряжение
и ваттметр
,
вольтметр
—
номинальное
напряжение первичной обмотки
,
вольтметр
—напряжение
и ваттметр
![]() —мощность
потерь при холостом ходе . По этим
показаниям можно определить коэффициент
трансформации для понижающего
трансформатора или для повышающего
трансформатора. Так как нагрузка
отсутствует (
),
то мощность, показываемая ваттметром,
— это мощность потерь в стали трансформатора
(магнитопроводе).
—мощность
потерь при холостом ходе . По этим
показаниям можно определить коэффициент
трансформации для понижающего
трансформатора или для повышающего
трансформатора. Так как нагрузка
отсутствует (
),
то мощность, показываемая ваттметром,
— это мощность потерь в стали трансформатора
(магнитопроводе).
Мощностью потерь в проводах обмоток можно пренебречь, так как при опыте холостого хода ток вторичной обмотки равен нулю, а ток в первичной обмотке — ток холостого хода составляет примерно 5 % номинального.
Можно также найти и полное сопротивление цепи (см. рис. 2.9):
(2.12)
Активное сопротивление цепи
![]()
и индуктивное сопротивление цепи
![]() .
.
Так
как практически сопротивления
![]() и
и
![]() ,
то значения
,
то значения
![]() и
и
![]() определяются
из приведенных формул.
определяются
из приведенных формул.
Опыт
короткого замыкания.
Опыт короткого замыкания выполняется
по схеме, представленной на рис. 2.12, при
условии, что к первичной обмотке
подводится пониженное напряжение
![]() ,
составляющее 5—10%
,
а точнее, такое напряжение, при котором
токи
,
составляющее 5—10%
,
а точнее, такое напряжение, при котором
токи
![]() и
и
![]() в
обмотках равны номинальным.
Вторичная
обмотка трансформатора замыкается
н
в
обмотках равны номинальным.
Вторичная
обмотка трансформатора замыкается
н акоротко.
При
этом опыте вольтметр
показывает
напряжение первичной обмотки
,
ваттметр
—
мощность короткого замыкания
акоротко.
При
этом опыте вольтметр
показывает
напряжение первичной обмотки
,
ваттметр
—
мощность короткого замыкания
![]() ,
амперметр
—
ток в первичной обмотке.По этим показаниям
можно определить мощность потерь в
обмотках, так как потери в магнитопроводе
составляют лишь 0,005 – 0,1 потерь при
номинальном режиме из-за пониженного
напряжения
.
Мощность потерь при коротком замыкании
и номинальных токах
,
амперметр
—
ток в первичной обмотке.По этим показаниям
можно определить мощность потерь в
обмотках, так как потери в магнитопроводе
составляют лишь 0,005 – 0,1 потерь при
номинальном режиме из-за пониженного
напряжения
.
Мощность потерь при коротком замыкании
и номинальных токах
![]() .
.
Кроме того, по данным этого опыта можно найти параметры упрощенной схемы замещения (рис. 2.13). Полное сопротивление
![]()
 ,
,
суммарное активное сопротивление обеих обмоток
![]() (2.13)
(2.13)
и реактивное сопротивление
![]() .
(2.14)
.
(2.14)
На основе опытов холостого хода и короткого замыкания по формулам (2.12),(2.13),(2.14) определяются параметры схемы замещения трансформатора.
Напряжение короткого замыкания. Как следует из схемы замещения (рис. 2.13),
![]() .
.
Обычно
составляет
5—8 %
![]() :
:
![]() .
.
Значение
![]() указано
на щитке трансформатора. Активная
составляющая напряжения короткого
замыкания находится по формуле
указано
на щитке трансформатора. Активная
составляющая напряжения короткого
замыкания находится по формуле
![]() ,
(2.15)
,
(2.15)
а реактивная составляющая напряжения короткого замыкания
![]() .
(2.16)
.
(2.16)
Процентные
значения напряжения
![]() связаны
между собой соотношением:
связаны
между собой соотношением:
![]() .
(2.17)
.
(2.17)
24)
Схемы соединений обмоток трехфазных трансформаторов |
главным образом применяются схемы соединения в звезду, треугольник и зигзаг—звезду. Соединение в зигзаг — звезду дает возможность при несимметрии нагрузки на стороне НН сглаживать на стороне ВН эту неравномерность. Кроме того, схема зигзага допускает иметь три напряжения, например 127, 220 и 380 е. а) Соединение обмоток в звезду Если соединить концы или начала обмоток трех фаз вместе, то получится соединение в звезду. На рис. 3,а показаны обмотки НН, соединенные в звезду. В нулевой точке соединены все концы обмоток у, z, а к началам а, Ьу с— подводится напряжение от трехфазной сети или генератора. На рис. 3,6 показано то же соединение обмоток НН в звезду, но только в нулевую точку соединены другие концы обмоток, которые прежде присоединялись к сети.. Нулевая точка звезды может быть выведена на крышку трансформатора (рис. 3,б)
а — одна схема соединения; б — другая схема соединения; в — соединение в звезду с выведенной нулевой точкой; г — векторная диаграмма линейных э. д с.
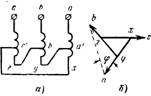
в) Соединение обмоток в зигзаг — звезду
г) Соединение обмоток по схеме А Если
соединить обмотки трансформатора,
как показано на рис. 7,а, то получится
соединение по схеме А. Схему, как это
видно из векторной диаграммы
а — схема соединений обмоток; б—векторная диаграмма.Эта схема не имеет применения в нормальных силовых трансформаторах и применяется только там, где необходимо иметь соединение обмоток в треугольник и в то же время требуется иметь нулевую точку. |
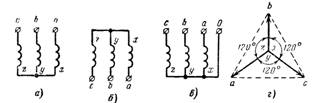 Рис.
3. Соединение обмотки НН в звезду.
Рис.
3. Соединение обмотки НН в звезду.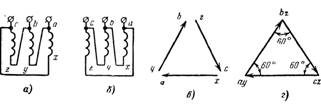 Рис.
4. Соединение обмоток НН в треугольник.
а
— первая схема соединения обмоток в
треугольник, б — вторая схема соединения
обмоток в треугольник; в — вектора
линейных э. д. с фаз a, b и с; г —векторная
диаграмма линейных э д с
Рис.
4. Соединение обмоток НН в треугольник.
а
— первая схема соединения обмоток в
треугольник, б — вторая схема соединения
обмоток в треугольник; в — вектора
линейных э. д. с фаз a, b и с; г —векторная
диаграмма линейных э д с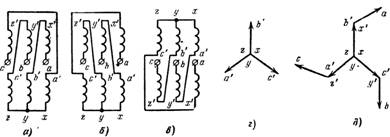
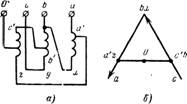 Рис.
7. Соединение обмотки по схеме А.
а
— схема соединений обмоток; б —
векторная диаграмма.Для того чтобы
получить соединения обмоток, отвечающих
векторной диаграмме рис. 7,6, принимают
соотношения числа витков на фазах
трансформатора, которые должны
удовлетворять следующим трем
условиям:
Рис.
7. Соединение обмотки по схеме А.
а
— схема соединений обмоток; б —
векторная диаграмма.Для того чтобы
получить соединения обмоток, отвечающих
векторной диаграмме рис. 7,6, принимают
соотношения числа витков на фазах
трансформатора, которые должны
удовлетворять следующим трем
условиям:
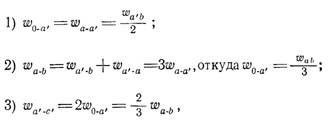 т.
е. обмотка фазы с должна иметь 2/3 числа
витков обмоток фаз а и b.
т.
е. обмотка фазы с должна иметь 2/3 числа
витков обмоток фаз а и b.
Автотрансформатор. В случае когда вторичное напряжение не сильно отличается от первичного (при коэффициенте трансформации, близком к единице), вместо обычного двухобмоточного трансформатора выгодно применять автотрансформатор, отличающийся от обычного тем, что его обмотка низшего напряжения составляет часть обмотки высшего напряжения (рис. 226, а). Иными словами, он имеет вместо двух обмоток одну, разделенную на две части. Участок 1—3 образует обмотку высшего напряжения, участок 2—3 — обмотку низшего напряжения. По участку 2—3 протекает разность токов i2 — i1. В автотрансформаторе потери мощности меньше, чем в двух-обмоточном трансформаторе, при одинаковой номинальной мощности. Это объясняется тем, что в двухобмоточном трансформаторе вся мощность S2=U2I2 передается из первичной цепи во вторичную электромагнитным путем, а в автотрансформаторе электромагнитным путем передается только часть этой мощности S2 (1 – 1/n) (здесь n — коэффициент трансформации). Остальная часть S2/n передается непосредственно из первичной во вторичную цепь в результате электрической связи между ними, поэтому рассчитывать автотрансформатор на эту мощность не требуется. Чем ближе коэффициент трансформации к единице, тем меньше часть мощности S2 передается электромагнитным путем, следовательно, тем меньше масса и габаритные размеры автотрансформатора. Например, при n = 2 электромагнитным путем во вторичную цепь передается половина мощности S2, а при n = 3 — уже 2/3 этой мощности. Следовательно, преимущества автотрансформаторов проявляются только при небольших коэффициентах трансформации, когда разность токов i2 — i1 мала и участок 2—3 включает в себя значительную часть всех имеющихся в трансформаторе витков. При больших коэффициентах трансформации выгоды от применения автотрансформаторов практически нет. Основным недостатком автотрансформаторов является то, что у них вторичная цепь электрически связана с первичной и должна
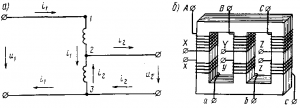 Рис.
226. Схемы автотрансформатора (а) и
трехфазного трансформатора (б)
Рис.
226. Схемы автотрансформатора (а) и
трехфазного трансформатора (б)
поэтому иметь одинаковую с ней изоляцию по отношению к земле. По этой причине, а также по условиям техники безопасности применение автотрансформаторов для связи цепей высокого и низкого напряжения недопустимо. Трехфазный трансформатор. Схемы соединения обмоток. Трехфазное напряжение обычно преобразуют трехстержне-выми трехфазными трансформаторами (рис. 226,б), в которых первичная и вторичная обмотки каждой фазы расположены на общем стержне. Только при очень больших мощностях (более 10 MB*А в фазе) для этой цели применяют три однофазных трансформатора, так как для транспортирования и монтажа они более удобны. Первичная и вторичная обмотки трехфазных трансформаторов могут быть соединены «звездой» (символ Y). «звездой с выведенной нулевой точкой» (символ Yн) или «треугольником» (символ ?). В трансформаторах, предназначенных для выпрямительных установок, вторичную обмотку иногда соединяют по схеме «зигзаг с выведенной нулевой точкой». Обычно обмотку высшего напряжения (ВН) соединяют по схеме «звезда», что позволяет при заданном линейном напряжении иметь меньшее число витков в фазе и снижает требования к изоляции обмоток, так как фазное напряжение в схеме «звезда» в ?З раз меньше линейного. Зажимы обмоток ВН обозначают буквами: начала — А, В, С, концы — X, Y, Z; зажимы обмоток низшего напряжения (НН); начала — a, b, c, концы — x, у, Z. При соединении обмоток трансформатора по схеме Y/Y и ?/? отношение линейных напряжений Uл.вн/Uл.нн при холостом ходе равно отношению ?BH/?Hн = n. При соединении по схеме Y/? отношение этих напряжений будет В ?Зn, а при ?/Y — n/?3.
В каждой фазе трехфазного трансформатора происходят те же процессы, что и в однофазном трансформаторе, поэтому в нем сохраняются те же соотношения между напряжениями, токами и числами витков обмоток. Группы соединений обмоток. В зависимости от схемы соединения первичной и вторичной обмоток, направления намотки и маркировки выводов трехфазного трансформатора его линейные первичные и вторичные напряжения могут быть сдвинуты по фазе на различный угол. Для облегчения практического включения трансформаторов на параллельную работу приходится разделять
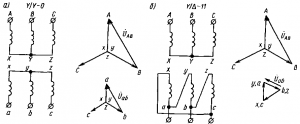 Рис.
227. Электрические схемы и векторные
диаграммы напряжений трансформаторов
с соединением обмоток по схемам Y/Y и Y/?
Рис.
227. Электрические схемы и векторные
диаграммы напряжений трансформаторов
с соединением обмоток по схемам Y/Y и Y/?
их на группы в зависимости от сдвига по фазе между линейными напряжениями, измеренными на одноименных зажимах. Группы соединений обозначают целыми числами от 0 до 11. Номер группы определяется углом между векторами первичного и вторичного линейных напряжений, поделенным на 30°, при этом угол отсчитывают от вектора линейного напряжения обмотки ВН по часовой стрелке (в сторону отставания векторов).
Трансформаторы, соединенные по схеме «звезда — звезда», имеют нулевую группу и обозначаются Y/Y-0 или Y/Yн-0. При этом векторы линейных напряжений UАВ и Uаb совпадают по фазе, т. е. угол между ними равен нулю (рис. 227, а). Трансформаторы, соединенные по схеме «звезда — треугольник» или «треугольник — звезда», имеют одиннадцатую группу и обозначаются Y/?-11 или ?/Y-11. В этом случае вектор Uab обмотки НН отстает от вектора UАB обмотки ВН на угол 330° (рис. 227,б). Однофазные трансформаторы также разделяются на группы, но у них в зависимости от направления намотки и маркировки выводов напряжения первичной и вторичной обмоток при холостом ходе могут совпадать по фазе либо быть свинуты на 180°. В соответствии с этим они могут принадлежать к нулевой или шестой группе. Трехфазные трансформаторы, также как и однофазные, бывают двухобмоточные и многообмоточные. На тяговых подстанциях иногда устанавливают трехобмоточные трансформаторы с двумя вторичными обмотками. Одна из них питает контактную сеть, а другая — электрические потребители близлежащих районов.
25-26) Принцип получения вращающегося магнитного поля. В основе работы асинхронных двигателей лежит вращающееся магнитное поле, создаваемое МДС обмоток статора. Принцип получения вращающегося магнитного поля с помощью неподвижной системы проводников заключается в том, что если по системе неподвижных проводников, распределенных в пространстве по окружности, протекают токи, сдвинутые по фазе, то в пространстве создается вращающееся поле. Если система проводников симметрична, а угол сдвига фаз между токами соседних проводников одинаков, то амплитуда индукции вращающегося магнитного поля и скорость постоянны. Если окружность с проводниками развернуть на плоскость, то с помощью подобной системы можно получить «бегущее» поле. Асинхронные двигатели. В основе принципа работы асинхронного электродвигателя лежит физическое взаимодействие магнитного поля статора с током, наведенным этим полем в обмотке ротора. К обмотке статора, выполненной в виде трех групп катушек, приложено электрическое напряжение, под действием которого по ней проходит трехфазный переменный ток, который и создает вращающееся магнитное поле. Пересекая замкнутую обмотку ротора, это поле наводит в ней в соответствии с законом электромагнитной индукции ток. В результате взаимодействия вращающегося магнитного поля статора с токами ротора возникает вращающий электромагнитный момент, приводящий ротор в движение. Теперь ротор способен выполнять механическую работу, т.е. сообщать движение соединенной с его валом технологической машине (транспортеру, насосу, вентилятору и др.). Таким образом, в электродвигателе происходит превращение электрической энергии в механическую. Магнитное поле вращается в пространстве с частотой nоб/мин= 60f/p где f - частота переменного тока, Гц; p - число пар полюсов обмотки статора.
Промышленная частота переменного тока равна 50 периодам в 1 секунду (50 Гц). Следовательно, частота вращения вала электродвигателя зависит от числа пар полюсов (например, если p=1, 2, 3, 4 и т.д., то на основании приведенной формулы n= 3000, 1500, 750, 600 об/мин и т.д.). Два типа асинхронных двигателей
Асинхронные двигатели бывают с короткозамкнутым ротором и с фазным ротором.
Оба типа имеют одинаковую конструкцию статора и отличаются лишь исполнением обмотки ротора. Магнитопровод ротора выполняется аналогично магнитопроводу статора — из электротехнической стали и шихтованным. Короткозамкнутые электродвигатели получили свое название из-за короткозамкнутой обмотки ротора, часто называемой "беличьей клеткой" из-за внешней схожести конструкции, состоящей из медных или алюминиевых стержней, которые замкнуты с торцов двумя кольцами. Стержни этой обмотки вставлены в пазы сердечника ротора. В электродвигателях малой и средней мощности ротор изготовляется путем заливки расплавленного алюминиевого сплава в пазы сердечника ротора, причем вместе со стержнями "беличьей клетки" отливают короткозамыкающие кольца и торцевые лопасти, осуществляющие самовентиляцию ротора и вентиляцию электродвигателя в целом. В электродвигателях большой мощности для изготовления "беличьей клетки" применяют медные стержни, концы которых вваривают в короткозамыкающие кольца. Фазный ротор имеет трехфазную (в общем случае — многофазную) обмотку, обычно соединённую по схеме «звезда» и выведенную на контактные кольца, вращающиеся вместе с валом машины. С помощью металлографитовых щёток, скользящих по этим кольцам, в цепь обмотки ротора включают пускорегулирующий реостат, исполняющий роль добавочного активного сопротивления, одинакового для каждой фазы. Возможен особый режим работы: при питании обмоток ротора от сети (машина двойного питания). В двигателях с фазным ротором имеется возможность увеличивать пусковой момент до максимального значения (в первый момент времени) с помощью пускового реостата, тем самым, уменьшая пусковой ток. Такие двигатели применяются для привода механизмов, которые пускают в ход при большой нагрузке или требующих плавного регулирования Основные конструктивные исполнения асинхронных электродвигателей Многообразие выполняемых работ и условий, в которых эксплуатируются асинхронные электродвигатели, обусловило то, что промышленность выпускает их в различном конструктивном исполнении. По степени защищенности электродвигатели выпускают:
Открытые - без специальных приспособлений для предохранения от случайного прикосновения к вращающимся и токоведущим частям, а также для предотвращения попадания внутрь посторонних предметов и т. п. (имеют ограниченное распространение).
Защищенные - имеющие приспособления для предохранения от случайного прикосновения к вращающимся и токоведущим частям, а также для предотвращения попадания внутрь посторонних предметов. Каплезащищенные - снабженные приспособлениями для предохранения внутренних частей от попадания капель влаги, падающих отвесно. Закрытые - у них внутренняя полость отделена от внешней среды оболочкой, препятствующей проникновению пыли. Взрывозащищенные - т. е. защищенными настолько хорошо, что они допускаются к применению во взрывоопасных помещениях. По способу монтажа различают фланцевые, вертикальные, встроенные электродвигатели и т. п.
27) При подключении обмотки статора к сети возникают токи I1, создающие вращающийся магнитный поток Ф. Большая часть магнитного потока сцепляется с обмотками ротора и статора. Это будет основной поток обмотки статора. Некоторая часть магнитного потока рассеивается в пространстве. Назовем его потоком рассеяния Фрс. Он cцепляется только с витками собственной обмотки. Основной магнитный поток асинхронного двигателя, вращаясь в пространстве, пересекает обмотку статора со скоростью n1 и обмотку ротора со скоростью n2, наводя в них основные ЭДС:
где W1k1 и W2k2 - произведения чисел витков на обмоточные коэффициенты; Е2s=Е2S.
Потоки рассеяния Фрс1 Фрс2 наводят в обмотках ЭДС рассеяния Ер1 и Ер2, которые, как в трансформаторе, могут быть выражены через соответствующие токи I1 и I2 и индуктивные сопротивления х1 и х2s. где х1 и х2s - индуктивные сопротивления рассеяния обмоток статора и ротора. Помимо названных выше ЭДС, в обмотках статора и ротора имеют место активные падения напряжения, которые компенсируются соответствующими ЭДС Er1 и Еr2.
Уравнениям ЭДС и токов соответствует эквивалентная схема замещения (рис. 5.8.1.). Таким образом, сложную магнитную цепь электрической машины можно заменить электрической схемой. Сопротивление r2'(1 - S)/S можно рассматривать как внешнее сопротивление, включенное в обмотку ротора. Оно является единственным переменным параметром схемы. Изменение этого сопротивления эквивалентно изменению нагрузки на валу двигателя, а следовательно, изменению скольжения S.
28) Вращающий момент в асинхронном двигателе создается взаимодействием тока ротора с магнитным полем машины. Вращающий момент математически можно выразить через электромагнитную мощность машины: где w1=2pn1/60 - угловая частота вращения поля. В свою очередь, n1=f160/Р, тогда. Подставим в формулу M1 выражение Рэм=Рэ2/S и, разделив на 9,81, получим:
Отсюда следует, что момент двигателя пропорционален электрическим потерям в роторе. Подставим в последнюю формулу значение тока I2’:
Получим где U1 - фазное напряжение обмотки статора.
МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА АСИНХРОННОГО ДВИГАТЕЛЯ
В последнем выражении для M1 единственным переменным параметром является скольжение S. Зависимость М=f(S) получило название механической характеристики двигателя. В момент пуска двигателя, когда n2=0, скольжение S=1, тогда:
Под действием момента Mn ротор придет во вращение. В дальнейшем скольжение будет уменьшаться, а вращающий момент увеличиваться. При скольжении Sкр он достигает максимального значения Mmax.. Величина критического скольжения. Тогда, подставив его значение в формулу для М, получим: Дальнейший разгон двигателя будет сопровождаться уменьшением скольжения и, вместе с тем уменьшением вращающего момента. Равновесие наступит, когда величине вращающего момента будет противостоять тормозной момент, вызванный нагрузкой. При номинальной нагрузке будут номинальный вращающий момент Мн и номинальное скольжение Sн. Отношение максимального момента к номинальному называется перегрузочной способностью двигателя.Обычно она составляет величину от 1,7 до 2,5. Отношение пускового момента к номинальному называется кратностью пускового момента. Эта величина может быть меньше единицы (например, 0,8) и больше ее (до 1,2). При меньшей кратности двигатель следует включать в работу без нагрузки, и лишь после разгона подается нагрузка. Двигатель с кратностью Кп.м.>1 можно включать в сеть с полной нагрузкой.
29)РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Если обратиться к формуле, связывающей частоту вращения ротора с частотой вращения поля и скольжением,
ωr = ωп(1−S) = |
60f |
(1−S) , |
p |
то из нее следует, что есть всего три варианта регулирования скорости: путем изменения частоты сети f, числа пар полюсов p и скольжения S.
• Наиболее перспективным способом регулирования частоты вращения асинхронного двигателя является частотный. Изменение частоты, подводимой к двигателю, осуществляется преобразователем частоты. При частотном регулировании изменяется синхронная частота вращения (частота вращения поля), а двигатель работает с небольшим скольжением. Регулирование экономичное, однако через преобразователь частоты проходит вся мощность и габариты преобразователя частоты превышают габариты двигателя. При преобразовании частоты и напряжения сети преобразователь частоты изменяет напряжение и частоту на выходе по закону V / f = const, что обеспечивает работу асинхронного двигателя при постоянном магнитном потоке.
• Как видно из формулы, изменяя число полюсов, можно изменять числа оборотов ротора. На этом принципе основана работа многоскоростных асинхронных электродвигателей, применяемых в металлорежущих станках, на элеваторах и транспортерах, в подъемных, крановых и насосных установках.
Двухскоростные электродвигатели можно разделить по кратности отношения скоростей на электродвигатели с отношением скоростей кратным и некратным двум. Первые почти всегда выполняют с одной обмоткой, которая переключается на разные числа полюсов, вторые - с двумя отдельными обмотками.
Многоскоростные электродвигатели могут быть выполнены на 3 или 4 скорости. Чтобы избежать сложных устройств для переключения обмотки ротора, многоскоростные двигатели выполняют с короткозамкнутым ротором.
• Наиболее простым способом, обеспечивающим плавное регулирование частоты вращения асинхронного двигателя, является изменение скольжения. Принципиальным недостатком этого способа регулирования частоты вращения является низкий КПД, так как потери в роторе пропорциональны скольжению. И какие бы ни предлагались варианты схем изменения скольжения, а их существуют десятки, в электромеханическом преобразователе энергии возможности преобразования в теплоту и в механическую мощность одинаковые.
• Применение многоскоростных электродвигателей позволяет упростить передачи; повысить производительность установок; устранить шумы и вибрации от работы зубчатых передач; упростить автоматическое управление процессами пуска, останова, реверсирования и торможения и, наконец, что очень важно, повысить коэффициент полезного действия установки благодаря снижению потерь в передачах.
30) Рабочие характеристики асинхронного двигателя представляют собой зависимости скольжения S, числа оборотов ротора n2, развиваемого момента М, потребляемого тока I1, расходуемой мощности Р1, коэффициента мощности соs и к. п. д. η от полезной мощности Р2 на валу машины. Эти характеристики (рис. 115) снимаются три естественных условиях работы двигателя, т. е. двигатель нерегулируемый, частота f1 и напряжение U1 сети остаются постоянными, а изменяется только нагрузка на валу двигателя.

При увеличении нагрузки на валу двигателя скольжение возрастет, причем при больших нагрузках скольжение увеличивается несколько быстрее, чем при малых.
При холостом ходе двигателя п2=n1 или S=0.
При номинальной нагрузке скольжение обычно составляет S = 3-5%.
Скорость вращения ротора
![]()
Так как при увеличении нагрузки на валу двигателя скольжение возрастает, то число оборотов будет уменьшаться. Однако изменение скорости вращения при увеличении нагрузки от 0 до номинальной очень незначительно и не превышает 5%. Поэтому скоростная характеристика асинхронного двигателя является жесткой — она имеет очень малый наклон к горизонтальной оси.
Вращающий момент, развиваемый двигателем М, уравновешен тормозным моментом на валу М2 и моментом, идущим на преодоление механических потерь М0, т. е.

где Р2 — полезная мощность двигателя,
2 — угловая скорость ротора.
При холостом ходе двигателя вращающий момент равен М0; с увеличением нагрузки на валу этот момент также увеличивается, причем за счет некоторого уменьшения скорости ротора увеличение вращающего момента происходит быстрее, чем увеличение полезной мощности на валу.
Сила тока I1 потребляемого двигателем из сети, неравномерно изменяется с увеличением нагрузки на валу двигателя. При холостом ходе соs мал и ток имеет большую реактивную составляющую и очень малую активную составляющую. При малых нагрузках на валу двигателя активная составляющая тока статора меньше реактивной составляющей, а потому изменение нагрузки, т. е. изменение активной составляющей тока, вызывает незначительное изменение силы тока I1 (определяющейся в основном реактивной составляющей). При больших нагрузках активная составляющая тока статора становится больше реактивной и изменение нагрузки вызывает значительное изменение силы тока I1..
Потребляемая двигателем мощность Р1 при графическом изображении имеет вид почти прямой линии, незначительно отклоняющейся вверх при больших нагрузках, что объясняется увеличением потерь в обмотках статора и ротора с увеличением нагрузки.
Изменение коэффициента мощности при изменении нагрузки на валу двигателя происходит следующим образом. При холостом ходе соs мал (порядка 0,2), так как активная составляющая тока статора, обусловленная потерями мощности в машине, мала по сравнению с реактивной составляющей этого тока, создающей магнитный поток. При увеличении нагрузки на валу соs возрастает (достигая наибольшего значения 0,8—0,9) в результате увеличения активной составляющей тока статора. При очень больших нагрузках происходит некоторое уменьшение соs, так как вследствие значительного увеличения скольжения и частоты тока в роторе возрастает реактивное сопротивление обмотки ротора.
Кривая к. п. д. т) имеет такой же вид, как в любой машине или трансформаторе. При холостом ходе к. п. д. равен нулю. С увеличением нагрузки на валу двигателя к. п. д. резко увеличивается, а затем уменьшается. Наибольшего значения к. п. д. достигает при такой нагрузке, когда потери мощности в стали и механические потери, не зависящие от нагрузки, равны потерям мощности в обмотках статора и ротора, зависящим от нагрузки.
31) Основными частями синхронной машины являются якорь и индуктор. Наиболее частым исполнением является такое исполнение, при котором якорь располагается на статоре, а на отделённом от него воздушным зазором роторе находится индуктор.
Якорь представляет собой одну или несколько обмоток переменного тока. В двигателях токи, подаваемые в якорь, создают вращающееся магнитное поле, которое сцепляется с полем индуктора, и таким образом происходит преобразование энергии. Поле якоря оказывает воздействие на поле индуктора и называется поэтому также полем реакции якоря. В генераторах поле реакции якоря создаётся переменными токами, индуцируемыми в обмотке якоря от индуктора. Индуктор состоит из полюсов — электромагнитов постоянного тока[1] или постоянных магнитов (в микромашинах). Индукторы синхронных машин имеют две различные конструкции: явнополюсную или неявнополюсную. Явнополюсная машина отличается тем, что полюса ярко выражены и имеют конструкцию, схожую с полюсами машины постоянного тока. При неявнополюсной конструкции обмотка возбуждения укладывается в пазы сердечника индуктора, весьма похоже на обмотку роторов асинхронных машин с фазным ротором, с той лишь разницей, что между полюсами оставляется место, незаполненное проводниками (так называемый большой зуб). Неявнополюсные конструкции применяются в быстроходных машинах, чтобы уменьшить механическую нагрузку на полюса. Для уменьшения магнитного сопротивления, то есть для улучшения прохождения магнитного потока применяются ферромагнитные сердечники ротора и статора. В основном они представляют собой шихтованную конструкцию из электротехнической стали (то есть набранную из отдельных листов). Электротехническая сталь обладает рядом интересных свойств. В том числе она имеет повышенное содержание кремния, чтобы повысить её электрическое сопротивление и уменьшить тем самым вихревые токи. Двигательный принцип. Принцип действия синхронного двигателя основан на взаимодействии вращающегося магнитного поля якоря и магнитного поля полюсов индуктора. Обычно якорь расположен на статоре, а индуктор — на роторе. В мощных двигателях в качестве полюсов используются электромагниты (ток на ротор подаётся через скользящий контакт щетка - кольцо), в маломощных — постоянные магниты.
Существует обращённая конструкция двигателей, в которой якорь расположен на роторе, а индуктор — на статоре (в устаревших двигателях, а также в современных криогенных синхронных машинах, в которых в обмотках возбуждения используются сверхпроводники.)
Запуск двигателя. Двигатель требует разгона до частоты, близкой к частоте вращения магнитного поля в зазоре, прежде чем сможет работать в синхронном режиме. При такой скорости вращающееся магнитное поле якоря сцепляется с магнитными полями полюсов индуктора (если индуктор расположен на статоре, то получается, что вращающееся магнитное поле вращающегося якоря (ротора) неподвижно относительно постоянного поля индуктора (статора), если индуктор на роторе, то магнитное поле вращающихся полюсов индуктора (ротора) неподвижно относительно вращающегося магнитного поля якоря (статора)) — это называется «вошёл в синхронизм».
Для
разгона обычно используется асинхронный
режим, при котором обмотки индуктора
замыкаются через реостат или
накоротко, как в асинхронной
машине, для такого режима запуска в
машинах на роторе делается короткозамкнутая
обмотка, которая также выполняет роль
успокоительной обмотки, устраняющей
"раскачивание" ротора при
синхронизации. После выхода на скорость
близкую к номинальной (>95%) индуктор
запитывают постоянным током. В двигателях
с постоянными магнитами применяется
внешний разгонный двигатель. Часто на
валу ставят небольшой генератор
постоянного тока, который питает
электромагниты. Также используется
частотный пуск, когда частоту тока якоря
постепенно увеличивают от 0 до номинальной
величины. Или наоборот, когда частоту
индуктора понижают от номинальной до
0, т.е. до постоянного тока. Частота
вращения ротора ![]() [об/мин]
остаётся неизменной, жёстко связанной
с частотой сети
[об/мин]
остаётся неизменной, жёстко связанной
с частотой сети ![]() [Гц]
соотношением:
[Гц]
соотношением:
![]() ,
,
где ![]() —
число пар полюсов ротора.
—
число пар полюсов ротора.
Синхронные двигатели при изменении возбуждения меняют импеданс с емкостного на индуктивный. Перевозбуждённые СД на холостом ходу применяют в качестве компенсаторов реактивной мощности. Синхронные двигатели в промышленности обычно применяют при единичных мощностях свыше 300 кВт, при меньших мощностях обычно применяется более простой (и надежный) асинхронный двигатель с короткозамкнутым ротором.
Обычно синхронные генераторы выполняют с якорем, расположенным на статоре, для удобства отвода электрической энергии. Поскольку мощность возбуждения невелика по сравнению с мощностью, снимаемой с якоря (0,3...2%), подвод постоянного тока к обмотке возбуждения с помощью двух контактных колец не вызывает особых затруднений. Принцип действия синхронного генератора основан на явлении электромагнитной индукции; при вращении ротора магнитный поток, создаваемый обмоткой возбуждения, сцепляется поочередно с каждой из фаз обмотки статора, индуцируя в них ЭДС. В наиболее распространенном случае применения трехфазной распределенной обмотки якоря в каждой из фаз, смещенных друг относительно друга на 120 градусов, индуцируется синусоидальная ЭДС. Соединяя фазы по стандартным схемам «треугольник» или «звезда», на выходе генератора получают трехфазное напряжение, являющееся общепринятым стандартом для магистральных электросетей.
Частота индуцируемой ЭДС [Гц] связана с частотой вращения ротора [об/мин] соотношением:
![]() ,
,
где — число пар полюсов ротора.
Часто синхронные генераторы используют вместо коллекторных машин для генерации постоянного тока, подключая их обмотки якоря к трехфазным выпрямителям.
32) Электрическая машина постоянного тока состоит из двух основных частей: неподвижной части ( индуктора) и вращающейся части ( якоря с барабанной обмоткой). На рис. 1 изображена конструктивная схема машины постоянного тока
Индуктор состоит из станины 1 цилиндрической формы, изготовленной из ферромагнитного материала, и полюсов с обмоткой возбуждения 2, закрепленных на станине. Обмотка возбуждения создает основной магнитный поток. Магнитный поток может создаваться постоянными магнитами, укрепленными на станине. Якорь состоит из следующих элементов: сердечника 3, обмотки 4, уложенной в пазы сердечника, коллектора 5.Рис. 1 Сердечник якоря для уменьшения потерь на вихревые точки набирается из изолированных друг от друга листов электротехнической стали.
Р ассмотрим
работу машины постоянного тока в режиме
генератора на модели рис.2,
ассмотрим
работу машины постоянного тока в режиме
генератора на модели рис.2,
где
1 - полюсы индуктора, 2 - якорь, 3 - проводники,
4 - контактные щетки.
Проводники
якорной обмотки расположены на поверхности
якоря. Внешние поверхности проводников
очищены от изоляции, а на эти поверхности
проводников наложены неподвижные
контактные щетки.
Контактные
щетки размещены на линии геометрической
нейтрали, проведенной посредине между
полюсами.
Приведем
якорь машины во вращение в направлении,
указанном стрелкой. Рис.
2 Определим направление ЭДС, индуктированных
в проводниках якорной обмотки по правилу
правой руки.На рис.2 крестиком обозначены
ЭДС, направленные от нас, точками - ЭДС,
направленные к нам. Соединим проводники
между собой так, чтобы ЭДС в них
складывались. Для этого соединяют
последовательно конец проводника,
расположенного в зоне одного полюса с
концом проводника, расположенного в
зоне полюса п ротивоположной
полярности (рис. 3)
ротивоположной
полярности (рис. 3)
Два проводника, соединенные последовательно, образуют один виток или одну катушку. ЭДС проводников, расположенных в зоне одного полюса, различны по величине. Наибольшая ЭДС индуктируется в проводнике, расположенном под срединой полюса, ЭДС, равная нулю, - в проводнике, расположенном на линии геометрической нейтрали. Рис. 3 Если соединить все проводники обмотки по определенному правилу последовательно, то результирующая ЭДС якорной обмотки равна нулю, ток в обмотке отсутствует. Контактные щетки делят якорную обмотку на две параллельные ветви. В верхней параллельной ветви индуктируется ЭДС одного направления, в нижней параллельной ветви - противоположного направления. ЭДС, снимаемая контактными щетками, равна сумме электродвижущих сил проводников, расположенных между щетками. На рис. 4 представлена схема замещения якорной обмотки.
В параллельных ветвях действуют одинаковые
ЭДС, направленные встречно друг другу.
При подключении к якорной обмотке
сопротивления в параллельных ветвях
возникают одинаковые токи
параллельных ветвях действуют одинаковые
ЭДС, направленные встречно друг другу.
При подключении к якорной обмотке
сопротивления в параллельных ветвях
возникают одинаковые токи ![]() ,
через сопротивление RH протекает
ток IЯ.
Рис.
4
ЭДС
якорной обмотки пропорциональна частоте
вращения якоря n2 и
магнитному потоку индуктора Ф
,
через сопротивление RH протекает
ток IЯ.
Рис.
4
ЭДС
якорной обмотки пропорциональна частоте
вращения якоря n2 и
магнитному потоку индуктора Ф
![]() (1)
(1)
где Се - константа. В реальных электрических машинах постоянного тока используется специальное контактное устройство - коллектор. Коллектор устанавливается на одном валу с сердечником якоря и состоит из отдельных изолированных друг от друга и от вала якоря медных пластин. Каждая из пластин соединена с одним или несколькими проводниками якорной обмотки. На коллектор накладываются неподвижные контактные щетки. С помощью контактных щеток вращающаяся якорная обмотка соединяется с сетью постоянного тока или с нагрузкой.
33) ЭДС И ЭЛЕКТРОМАГНИТНЫЙ МОМЕНТ ГЕНЕРАТОРА ПОСТОЯННОГО ТОКА
Выведем зависимость ЭДС генератора от параметров машины, скорости вращения якоря и магнитного потока.
ЭДС, индуцируемая в каждом витке обмотки, может быть определена по формуле
 .
(1) Применительно к машине постоянного
тока эта формула (и весь последующий
вывод) значительно упрощается введением
понятия средней индукции.
.
(1) Применительно к машине постоянного
тока эта формула (и весь последующий
вывод) значительно упрощается введением
понятия средней индукции.
Пусть
магнитный поток, создаваемый главным
полюсом, Ф, тогда при 2 p полюсах общий
магнитный поток равен 2р Ф. Однако можно
с достаточной точностью допустить, что
индукция распределена равномерно во
всем воздушном зазоре, поэтому для
расчетов можно взять ее среднее значение:
 ,
(2)
,
(2)
где
d — диаметр сердечника якоря, l— образующая
цилиндра якоря (длина якоря). Тогда
средняя ЭДС одного проводника обмотки
при
 = 90° равна
= 90° равна
 ,
(3)
,
(3)
где
l- длина активной части проводника (равна
образующей цилиндра якоря); v — линейная
(окружная) скорость движения проводника.
Подставим в формулу (3) значение средней
индукции Вср и линейной скорости
 и после преобразования получим
и после преобразования получим
 ,
(4) где n — скорость вращения якоря. Пусть
обмотка содержит 2а параллельных ветвей,
тогда в каждой параллельной ветви будет
,
(4) где n — скорость вращения якоря. Пусть
обмотка содержит 2а параллельных ветвей,
тогда в каждой параллельной ветви будет
 активных проводников. Так как ЭДС
генератора равна ЭДС параллельной
ветви, то можно записать:
активных проводников. Так как ЭДС
генератора равна ЭДС параллельной
ветви, то можно записать:
 ,
(5) где
,
(5) где
 —
ЭДС генератора. Подставим выражение
(4) в уравнение (3), после сокращения
получим:
—
ЭДС генератора. Подставим выражение
(4) в уравнение (3), после сокращения
получим:
 .
(6) В полученной формуле выделенная дробь
содержит параметры, зависящие от
конструкции машины. Для данной конструкции
машины эта величина постоянная. Обозначим
эту дробь через с, тогда для ЭДС генератора
окончательно имеем:
.
(6) В полученной формуле выделенная дробь
содержит параметры, зависящие от
конструкции машины. Для данной конструкции
машины эта величина постоянная. Обозначим
эту дробь через с, тогда для ЭДС генератора
окончательно имеем:
 .
(7) Таким образом, ЭДС генератора
постоянного тока пропорциональна
значению магнитного потока Ф и скорости
вращения якоря п. Следовательно, для
поддержания постоянного напряжения на
зажимах генератора можно изменять ЭДС
либо значением магнитного потока, либо
скоростью вращения ротора (либо тем и
другим). На практике ротор генератора
приводят во вращение двигателем,
работающим нормально при определенной
скорости вращения вала, а магнитный
поток изменяют путем изменения тока в
обмотке возбуждения. Мощность генератора
постоянного тока можно представить
формулой механической мощности (Р =
.
(7) Таким образом, ЭДС генератора
постоянного тока пропорциональна
значению магнитного потока Ф и скорости
вращения якоря п. Следовательно, для
поддержания постоянного напряжения на
зажимах генератора можно изменять ЭДС
либо значением магнитного потока, либо
скоростью вращения ротора (либо тем и
другим). На практике ротор генератора
приводят во вращение двигателем,
работающим нормально при определенной
скорости вращения вала, а магнитный
поток изменяют путем изменения тока в
обмотке возбуждения. Мощность генератора
постоянного тока можно представить
формулой механической мощности (Р =
 )
, причем под работой А следует понимать
работу, затрачиваемую па преодоление
тормозного момента, развиваемого якорем,
за один оборот при вращении якоря со
скоростью n (без потерь). Тогда эту формулу
можно записать так:
)
, причем под работой А следует понимать
работу, затрачиваемую па преодоление
тормозного момента, развиваемого якорем,
за один оборот при вращении якоря со
скоростью n (без потерь). Тогда эту формулу
можно записать так:
 ,
(8) где F — сила, действующая на якорь.
При таком взаимодействии на каждый
проводник обмотки якоря с током I
действует сила
,
(8) где F — сила, действующая на якорь.
При таком взаимодействии на каждый
проводник обмотки якоря с током I
действует сила
 , а на N проводников обмотки
, а на N проводников обмотки .
(9) РЕАКЦИЯ ЯКОРЯ
.
(9) РЕАКЦИЯ ЯКОРЯ
В
режиме холостого хода генератора
постоянного тока в его обмотке индуцируется
только ЭДС, а тока в обмотке нет, так как
ЭДС параллельных ветвей взаимно
компенсируются. При этом машина имеет
только один магнитный поток — поток
полюсов. Но стоит включить нагрузку,
как в обмотке якоря появится ток и, как
известно, этот ток создаст свой магнитный
поток, который начнет накладываться на
ток полюсов, т. е. имеет место явление,
называемое реакцией якоря. Учитывая
соотношение (2), последнее уравнение
можно записать следующим образом:
 ,
(10)
,
(10)
Подставив
уравнение (10) в уравнение (8), получим
выражение для мощности:
=
 =
= .
(11) Так как
.
(11) Так как
 Ф,
то окончательно имеем:
Ф,
то окончательно имеем:
 .
(12) Для общего момента машины М можно
записать:
.
(12) Для общего момента машины М можно
записать:
 ,
где
,
где
 постоянный для данной машины коэффициент,
зависящий от особенностей ее конструкции.
Таким образом, электромагнитный момент
машины выражается формулой М = сФ1я. (13)
постоянный для данной машины коэффициент,
зависящий от особенностей ее конструкции.
Таким образом, электромагнитный момент
машины выражается формулой М = сФ1я. (13)
34) ГЕНЕРАТОРЫ ПОСТОЯННОГО ТОКА
Классификация. Свойства генераторов постоянного тока обусловлены в основном способом питания обмотки возбуждения. В зависимости от этого различают следующие типы генераторов: 1) с независимым возбуждением — обмотка возбуждения получает питание от постороннего источника постоянного тока; 2) с параллельным возбуждением — обмотка возбуждения подключена к обмотке якоря параллельно нагрузке; 3) с последовательным возбуждением — обмотка возбуждения включена последовательно с обмоткой якоря и нагрузкой; 4) со смешанным возбуждением — имеются две обмотки возбуждения: одна подключена параллельно нагрузке, а другая — последовательно с ней. Генераторы рассматриваемых типов имеют одинаковое устройство и отличаются лишь выполнением обмотки возбуждения. Обмотки независимого и параллельного возбуждения, имеющие большое число витков, изготовляют из провода малого сечения; обмотку последовательного возбуждения, имеющую небольшое число витков,— из провода большого сечения. Генераторы малой мощности иногда выполняют с постоянными магнитами. Свойства таких генераторов близки к свойствам генераторов с независимым возбуждением. ХАРАКТЕРИСТИКИ ГЕНЕРАТОРОВ ПОСТОЯННОГО ТОКА
Характеристики генератора определяют его рабочие свойства и представляют зависимость между основными величинами, которыми являются э. д. с. в обмотке якоря Е, напряжение на его зажимах и, ток в якоре Iя, ток возбуждения Iв и скорость вращения якоря п. Характеристики представляют собой зависимости между двумя из указанных основных величин при неизменных остальных. Эти зависимости имеют различный вид для генераторов разных типов. Снятие всех характеристик машины производится при постоянной скорости вращения якоря, так как при изменении скорости значительно изменяются все характеристики генератора.
35) Двигатель постоянного тока. Электрический двигатель постоянного тока – машина, суть работы которой заключается в преобразовании постоянного электрического тока в механическую (кинетическую) энергию вращения. Работа эл двигателей постоянного тока основана на принципе электромагнитной индукции. Электрический двигатель постоянного тока состоит из статора и ротора. Взаимодействие магнитных полей статора и ротора эл двигателя постоянного тока создает вращающий момент, который и является причиной вращения ротора двигателя. Электрические двигатели постоянного тока бывают коллекторными и бесколлектроными. Коллекторные двигатели постоянного тока по исполнению бывают следующих видов: с возбуждением постоянными магнитами, с параллельным соединением обмоток возбуждения и якоря, с последовательным соединением обмоток возбуждения и якоря, со смешанным соединением обмоток возбуждения и якоря. Бесколлекторные двигатели постоянного тока – эл двигатели, выполненные в виде замкнутой системы с использованием датчика положения ротора, системы управления и силового полупроводникового преобразователя. Основное преимущество бесколлекторного двигателя постоянного тока – отсутствие вращающихся и переключающихся контактов, что на практике применения увеличивает ресурс работы эл двигателя. Также бесколлекторные двигатели постоянного тока характеризуются высоким быстродействием и динамикой, точностью позиционирования, большой перегрузочной способностью по моменту и низким перегревом электродвигателя при работе в режимах с возможными перегрузками.
Двигатели независимого и параллельного возбуждения. Схема включения двигателя независимого возбуждения показана на рис. 5.19.
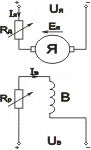 Рис.
5.19.В цепь якоря может быть включено
добавочное сопротивление Rд,
например пусковой реостат. Для
регулирования тока возбуждения в цепь
обмотки возбуждения может быть включен
регулировочный реостат Rр.
У двигателя параллельного возбуждения
обмотки якоря и возбуждения подключены
к одному источнику питания, и напряжение
на них одинаковое. Следовательно,
двигатель параллельного возбуждения
можно рассматривать как двигатель
независимого возбуждения при Uя=
Uв.
Рис.
5.19.В цепь якоря может быть включено
добавочное сопротивление Rд,
например пусковой реостат. Для
регулирования тока возбуждения в цепь
обмотки возбуждения может быть включен
регулировочный реостат Rр.
У двигателя параллельного возбуждения
обмотки якоря и возбуждения подключены
к одному источнику питания, и напряжение
на них одинаковое. Следовательно,
двигатель параллельного возбуждения
можно рассматривать как двигатель
независимого возбуждения при Uя=
Uв.
Рабочие характеристики.Рабочие характеристики двигателя – это зависимости угловой скорости ω, электромагнитного Мэм. и полезного М2 моментов и кпд η от полезной механической мощности на валу двигателя P2=M2ω при номинальном напряжении питания и отсутствии добавочных сопротивлений (рис. 5.20,б). Однако у рассматриваемых двигателей рабочие характеристики построены не в функции полезной мощности двигателя P2, а в функции тока якоря Iя. Объясняется это тем, что в двигателях постоянного тока электрическая мощность, идущая на преобразование в механическую, поступает через цепь якоря. Ток якоря двигателей независимого и параллельного возбуждения, у которых скорость слабо зависит от нагрузки, практически прямо пропорционален мощности P2. Уравнения же рабочих характеристик через ток Iя получить гораздо проще. Характеристики ω= f(Iя) и Mэм.=а(Iя) могут быть построены соответственно на основании уравнений (5.36) и (5.10). Без учета реакции якоря эти характеристики линейные, у реальных машин под действием реакции якоря (изменение Ф) характеристики могут оказаться нелинейными. Полезная составляющая момента двигателя M2 меньше электромагнитного момента на значение момента холостого хода M0=(ΔPмех.+ΔPм)/ ω, где ΔPмех. – механические потери мощности (трение); Δ Pм – магнитные потери. Характеристики полезного момента M2 и КПД η начинаются из точки реального холостого хода, которому соответствует ток якоря Iяо (рис. 5.20,б). Кривая КПД имеет типичный для всех электрических машин характер, т.к. в двигателе имеются постоянные потери (ΔPмех.+ΔPм+UвIв), практически не зависящие от нагрузки (тока якоря), и переменные потери в якоре I 2 я Rя .
Двигатели последовательного и смешанного возбуждения. У двигателя последовательного возбуждения (рис. 5.23,а) ток якоря протекает по обмотке возбуждения (Iв= Iя) и это определенным образом сказывается на основных характеристиках двигателя. При отсутствии насыщения магнитопровода можно принять, что Ф=KфIя, (5.40) где Kф – коэффициент пропорциональности. С учетом (5.40) уравнения (5.10) и (5.37) принимают вид Мэм=KKфIя2, (5.41) ω = (U/ √(KKфMэм)) -(Rя+Rв/KKф), (5.42)
где Rв – сопротивление обмотки возбуждения. Механическая характеристика (рис. 5.23, б пунктирная линия) мягкая, имеет гиперболическую форму и обеспечивает устойчивую работу двигателя. Мягкость характеристики объясняется тем, что с увеличением момента нагрузки и соответственно уменьшением скорости растут ток и поток возбуждения. При больших нагрузках начинает сказываться насыщение магнитопровода и характеристика отличается от расчетной (сплошная линия). Двигатель последовательного возбуждения нельзя пускать без нагрузки на валу, так как при Мэм → 0, угловая скорость ω → ∞. Квадратичная зависимость момента от тока позволяет при одинаковой кратности пускового тока получать у двигателя последовательного возбуждения больший пусковой момент, чем у двигателя независимого или параллельного возбуждения. Пуск, реверсирование, торможение и регулирование угловой скорости двигателей последовательного возбуждения осуществляется теми же способами, что и у двигателей независимого и параллельного возбуждения с учетом специфики включения обмоток.
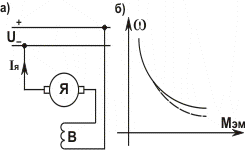 Рис.5.23
Рис.5.23
Двигатели смешанного возбуждения по своим характеристикам занимают промежуточное положение между двигателями независимого и последовательного возбуждения. Конкретный вид характеристик зависит от того, согласно или встречно(по потоку) включены между собой обмотки возбуждения.