

4.3.Погрешности курсовых систем
При работе курсовых систем в режиме магнитной коррекции могут возникать методические погрешности из-за воздействия ускорений на чувствительный элемент и отклонения его от плоскости горизонта. На чувствительный элемент, кроме горизонтальной составляющей вектора напряженности магнитного поля Земли, в этом случае действует и вертикальная составляющая этого вектора. Методические погрешности имеют синусоидальный характер и зависят, кроме ускорения, от широты, места и курса самолета.
При взлете самолета с углами тангажа более 15° будет также накапливаться дополнительная погрешность магнитного датчика.
В режиме ГПК полная погрешность курсовых систем складывается из погрешностей: начальной выставки курса, азимутального ухода гироскопа, из-за неточной компенсации вращения Земли, измерения ортодромического курса из-за бокового отклонения от ортодромии, дистанционной передачи сигнала от гироагрегата на указатели. Погрешности из-за вращения Земли и перемещения самолета, карданные погрешности, девиационные погрешности, погрешности от воздействия ускорений на систему горизонтальной коррекции и температуры на систему моментной широтной коррекции можно, отнести к методическим погрешностям.
Погрешности из-за разбаланса от люфтов в опорах, температурного расширения ротора, из-за трения в осях карданова подвеса гироскопа, из-за изменения кинетического момента гироскопа, из-за несовершенства следящих систем и дистанционных передач можно отнести к инструментальным погрешностям курсовых систем.
4.4.Комплексный метод определения курса
Комплексный подход определения курса состоит в воспроизведении (стабилизации) нескольких направлений в азимуте различными средствами (датчиками направлений), отличающимися по своим статическим и динамическим свойствам, и взаимной коррекции их погрешностей. В соответствии с этим комплексную или единую курсовую систему можно определить как совокупность различных по своим свойствам датчиков направлений (стабилизаторов) в азимуте и корректирующего (сглаживающего) звена.
Особенностью комплексной курсовой системы является наличие единого указателя, работающего от различных датчиков курса, что обеспечивает получение курса при любых условиях полета.
Дублирование датчиков и наивыгоднейшие связи между приборами, входящими в курсовую систему, позволяют получить гибкую систему, в которой недостатки одних датчиков в данных условиях полета компенсируются преимуществами других. В ряде случаев объединение датчиков в единую курсовую систему позволяет получить большую точность измерения курса, чем при измерении курса отдельными приборами.
На рис.14 изображена структурная схема курсовой системы, в которой на единый указатель работает магнитный датчик (МД),, астрономический датчик (АД) гирополукомпаса ГА и радиокомпас АРК. Для уменьшения карданных ошибок наружная рамка гирополукомпаса стабилизируется от гировертикали (ГВ), коррекция которой отключается при длительно действующих горизонтальных, ускорениях с помощью выключателя коррекции (ВК).

Рис.14. Блок-схема единой курсовой системы:
УЛ – указатель летчика; АРК – автоматический радиокомпас; АРК – поправка на радиостанцию; – курс; УШ – указатель штурмана; М – поправка на магнитное склонение; ГА – гироагрегат (гирополукомпас); ГВ – гировертикаль; - крен; - тангаж; 3sin - поправка на вращение Земли; ВК – выключатель коррекции; Z – угловая скорость самолета; УАК – указатель астрокомпаса; АД – астродатчик; И – истинный курс; АК – астрокомпас; ГПК – гирополукомпас; МК – магнитный компас; П – переключатель; КМ – коррекционный механизм; К – поправка на магнитную девиацию; МД – магнитный датчик.
Для компенсации «уходов» в азимуте из-за вращения Земли гирополукомпас корректируется сигналами, пропорциональными вертикальной составляющей скорости вращения Земли.
Комплексная (единая) курсовая система является также датчиком курсовых сигналов для различных ее потребителей на летательном аппарате (навигационный координатор, автопилот).
На
рис.15 представлена электромеханическая
схема единой курсовой системы,
составленной на основании блок-схемы
на рис.14. Основой этой курсовой системы
является ГПК,который, помимо обычных
внутренней 1 и наружной 2 рамок подвеса,
имеет вспомогательные рамки 5 и 4 для
исключения карданных ошибок ГПК,
вызываемых продольными и поперечными
кренами самолета. Углы наклона рамок 3
и 4 относительно самолета, измеренные
сельсинами
![]() и
и![]() ,
сравниваются с углами поворота ГВ,
измеренными сельсинами
,
сравниваются с углами поворота ГВ,
измеренными сельсинами![]() и
и![]() .
.
Сигналы
рассогласования через усилители У1 и
У2 подаются на электродвигатели
![]() и
и![]() отработки рамок 3 и 4. В результате ось
вращения рамки 2 подвеса гирополукомпаса
удерживается на направлении вертикали
и карданная погрешность гирололукомласа
исключается. Выключатель коррекции
реагирует на угловую скорость
разворота
и отключает магнитный и астрономический
датчики от ГПК. Одновременно
выключатель коррекции отключает
маятниковую коррекцию (ЭП) горизонтальной
оси ротора ГПК. В ВК имеется реле
времени, которое разрывает электрические
цепи только после того, как длительность
виража превысит определяемое время,
выбранное из условия, чтобы накапливание
погрешностей в курсовой системе не
превышало допустимой величины.
отработки рамок 3 и 4. В результате ось
вращения рамки 2 подвеса гирополукомпаса
удерживается на направлении вертикали
и карданная погрешность гирололукомласа
исключается. Выключатель коррекции
реагирует на угловую скорость
разворота
и отключает магнитный и астрономический
датчики от ГПК. Одновременно
выключатель коррекции отключает
маятниковую коррекцию (ЭП) горизонтальной
оси ротора ГПК. В ВК имеется реле
времени, которое разрывает электрические
цепи только после того, как длительность
виража превысит определяемое время,
выбранное из условия, чтобы накапливание
погрешностей в курсовой системе не
превышало допустимой величины.
Сигналы
магнитного датчика через коррекционный
механизм передаются на ГПК с помощью
следящей системы, состоящей из вращающегося
трансформатора![]() ,
усилителя У4, электродвигателя
,
усилителя У4, электродвигателя![]() и сельсина
и сельсина![]() .
Переключатель П служит для перехода с
магнитного на астрономический .датчик.
Астрономический датчик (АД) следит за
Солнцем с помощью фотоэлемента ФЭ,
усилителя У5, электродвигателя Д
и измеряет бортовой пеленг
Солнца. Астрономический курс а
получается в результате вычисления
выражения а=A-,
где А — азимут Солнца, вырабатываемый
с помощью вычислителя азимута А. Это
вычисление производится с помощью
дифференциального сельсина ДС и
вращающегося трансформатора ВТ,
получающих сигнал от сельсина С.
.
Переключатель П служит для перехода с
магнитного на астрономический .датчик.
Астрономический датчик (АД) следит за
Солнцем с помощью фотоэлемента ФЭ,
усилителя У5, электродвигателя Д
и измеряет бортовой пеленг
Солнца. Астрономический курс а
получается в результате вычисления
выражения а=A-,
где А — азимут Солнца, вырабатываемый
с помощью вычислителя азимута А. Это
вычисление производится с помощью
дифференциального сельсина ДС и
вращающегося трансформатора ВТ,
получающих сигнал от сельсина С.
Магнитный или астрономический курсы сравниваются с курсом ГПК с помощью сельсина Сy2, а электродвигатель Дy через редуктор отрабатывает статор сельсина Сy2, ротор которого связан с осью рамки 2 подвеса ГПК. Выходной сигнал этого сельсина подается на единый указатель курса (УК). На этом же указателе УК можно отсчитать показания радиокомпаса. Так как при отключении выключателем коррекции датчиков МД и АД «уход» ГПК вызывает погрешности в отсчете курса по указателю, в единых курсовых системах с отключающимися на вираже датчиками курса применяют прецизионные ГПК.
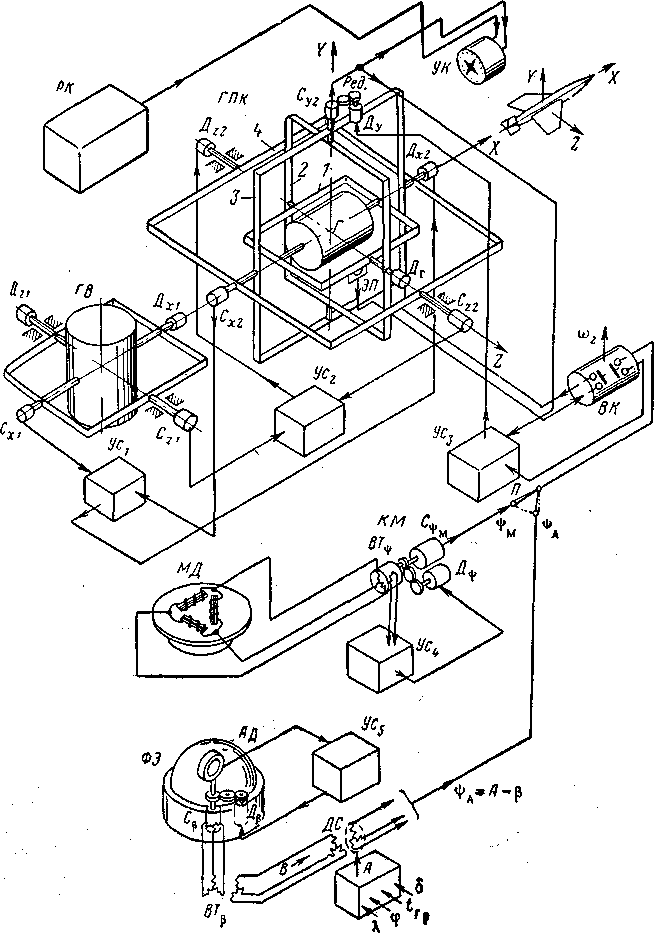
Рис.15.Электрокинематическая схема единой курсовой системы
РК — радиокомпас; ГПК — гирополукомпас; УК — указатель курса; ДС — дифференциальный сельсин; ВТ — вращающийся трансформатор; С—сельсин; Ус—усилитель; Г — гироскоп; П — переключатель; ФЭ — фотоэлемент; Д — электродвигатель; КМ—коррекционный механизм; ВК — выключатель коррекции; МД—магнитный датчик; АД—астрономический датчик; А — вычислитель азимута; ГВ — гировертикаль.