

Глава 15.Курсовые системы ла
Содержание.
1.Состав курсовых систем……………………………………………..2
2. Гироскопические приборы, их погрешности и математическая модель......................................................................................................2
2.1. Гироскопические датчики..…………………………………2
2.2. Математическая модель гироскопического датчика..…….3
2.3. Авиагоризонты..………………………………………...…...6
2.4. Центральные гировертикали..……………………...……….8
2.5. Датчики и указатели угловых скоростей ЛА..………...…10
2.6. Гирополукомпасы..………………………...………………10
2.7. Погрешности гироскопических датчиков..…………...….13
3. Радиокомпас, принцип действия и его погрешности..………….14
3.1. Основные определения..……………..……………………14
3.2. Принцип действия радиопеленгатора..…..…………….…16
3.3. Принцип действия радиокомпаса..………...……………...18
4. Принципы построения курсовых систем. Комплексная обработка информации в курсовых системах..………………………….……...22
4.1. Особенности построения курсовых систем..………….....23 4.2. Режимы работы курсовых систем..…………………….....27
4.3. Погрешности курсовых систем..…………………...……..30
4.4. Комплексный метод определения курса..………………..31
4.5. Курсовые системы типа КС..………………………...……35
4.6. Курсовые системы типа КСИ..……………………………35 4.7.Курсовертикали типа СКВ-2Н..……………………………35
4.8. Курсовые системы типа ТКС-П..…………………..….…..37
Заключение………………………………………………………...… 37
Контрольные вопросы………………………………………………..38
1.Состав курсовых систем
Курс является одним из важнейших параметров, знание которого необходимо для решения задач навигации и управления. Для определения курса самолётов была создана самая многочисленная группа курсовых приборов и систем, основанных на различных физических принципах работы. В состав курсовых систем входят различные приборы и системы. В частности: магнитные и индукционные компасы, гироскопические приборы и системы, астрокомпасы, радиокомпасы, доплеровские системы, а также элементы спутниковой навигации.
2.Гироскопические датчики, их погрешности и математическая модель.
2.1.Гироскопические датчики
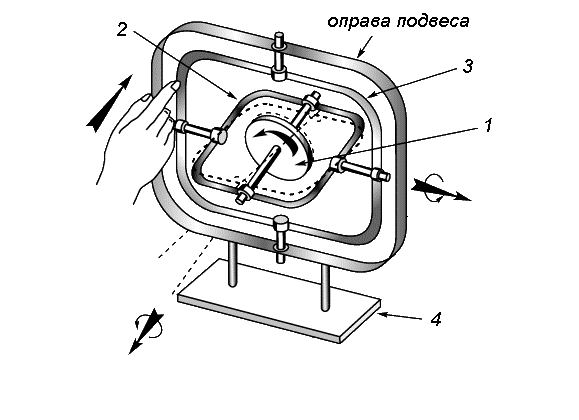
Гироскопом называют вращающееся вокруг оси симметрии с большой угловой скоростью тело вращения (ротор), одна из точек которого неподвижна. Ось z симметрии ротора 1 (рис 1) называют осью фигуры или осью ротора гироскопа.
В большинстве гироскопических приборов для обеспечения свободы вращения ротора гироскопа вокруг неподвижной точки применяют карданов подвес, который состоит из двух рамок 2 и 3. Ротор 1 гироскопа с большой угловой скоростью y вращается вокруг оси y1относительно внутренней рамки 2, которая может поворачиваться вокруг оси z относительно рамки 3, а последняя - вокруг оси x относительно неподвижной подставки 4.
Карданов подвес обеспечивает ротору гироскопа свободу вращения относительно трех осей (x, y1 и z). Поэтому гироскоп, установленный в кардановом подвесе, называют гироскопом с тремя степенями свободы. Если центр масс гироскопа совпадает с точкой пресечения осей карданова подвеса, то такой гироскоп называется астатическим.
z
x
y

![]()
![]()

![]()

Рис.1. Гироскоп в кардановом подвесе:
1 – ротор гироскопа; 2 – внутренняя рамка гироскопа; 3 – наружная рамка гироскопа; 4 – подставка; y – собственная угловая скорость вращения ротора гироскопа; x - вектор переносной угловой скорости.