

Датчики физических величин Датчик как цепь измерительных преобразователей
Одним из основных положений современной теории измерительных устройств является положение об измерительном преобразовании. В соответствии с ним измерение рассматривается как процесс приема и преобразования информации о измеряемой величине, происходящий в измерительных устройствах. Структура измерительных устройств в связи с этим представляется в виде совокупности измерительных преобразователей, осуществляющих функциональные измерительные преобразования сигналов различной физической природы. Существует множество разновидностей измерительных устройств, но все эти устройства выполнены на основе ограниченного числа измерительных преобразователей.
Так в настоящее время разработано много различных типов тензорезисторных датчиков. Это датчики для измерения усилий, деформаций, моментов и других физических величин. Датчики имеют различные пределы измерения, отличаются конструктивным исполнением, предназначены для различных условий эксплуатации и т. д. Но, представляя тензорезисторные датчики в виде последовательной цепи измерительных преобразователей, можно заметить, что некоторые из этих преобразователей являются общими для всех датчиков. Каждый тензорезисторный датчик включает в себя такие измерительные преобразователи, как тензорезистор и измерительная цепь, независимо от того, является ли он датчиком усилия или перемещения. Очень многие тензорезисторные датчики включают в себя упругие элементы, преобразующие усилие или давление в деформацию.
Структурная схема трензорезисторного датчика усилий:
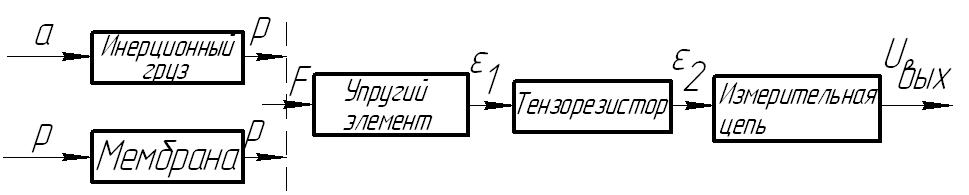
Измеряемое усилие F с помощью упругого элемента преобразуется в деформацию Δl. Деформация упругого элемента воспринимается тензорезистором и преобразуется в изменение сопротивления тензорезистора Δr, которое в измерительной цепи преобразуется в величину выходного напряжения. Структурная схема является общей для других тензорезистивных датчиков, у которых измеряемая величина с помощью тех или иных измерительных преобразователей преобразуется в силу. Такими преобразователями могут быть, например, мембрана для измерения давления или инерционная масса для датчика ускорений.
Таким образом, структурная схема, представленная на рисунке, включает практически все многообразие тензорезисторных датчиков отличающихся между собой не только условиями эксплуатации и пределами измерения, но и входной величиной.
Аналогичную картину можно увидеть, если, например, тензорезистивный преобразователь заменить индуктивным.
Замена только одного измерительного преобразователя другим позволяет получить цепь преобразования физических величин другой обширной группой датчиков – индуктивных. Рассуждая аналогичным образом, можно составить структурную схему любого другого датчика, в котором измеряемая величина претерпевает ряд последовательных преобразований. Такие схемы являются схемами последовательного преобразования измеряемой величины. Цепь последовательного преобразования измеряемой величины характеризуется тем, что измеряемая величина поступает на вход первого измерительного преобразователя, часто называемого входным измерительным преобразователем; выходная величина его является входной величиной второго измерительного преобразователя и т.д.
Преобразование осуществляется до тех пор, пока на выходе последнего измерительного преобразователя, который можно называть выходным измерительным преобразователем, не будет получена выходная величина, удобная для восприятия человеком или для использования в цепи дальнейшего преобразования с целью регистрации и управления.
Структурная схема индуктивного датчика усилий:

Измерительные преобразователи, которые в цепи преобразования находятся между входным и выходным, можно назвать промежуточными измерительными преобразователями. Причем деление измерительных преобразователей на входные, промежуточные и выходные во многих случаях является условным, так как один и тот же преобразователь в зависимости от того, в какой конкретно датчик он входит, может быть и входным, и промежуточным, и выходным, Так, например, упругий элемент в тензорезисторном или индуктивном датчике силы является входным измерительным преобразователем, в индуктивном акселерометре — промежуточным, а в механическом динамометре — выходным.
В цепи измерительных преобразований измерительные преобразователи различаются, в первую очередь, физическими основами преобразования измеряемой величины. В каждом измерительном преобразователе используется какая-либо физическая закономерность, функционально связывающая одну физическую величину с другой. Так в мембране датчика давления как измерительном преобразователе преобразование давления в силу осуществляется в соответствии с закономерностью:
![]()
где Р — давление — входная величина; Р — сила — выходная величина; Sэф — эффективная площадь мембраны; константа, характеризующая мембрану как измерительный преобразователь. Входной величиной стержневого упругого элемента является сила, а выходной — деформация упругого элемента. Связь между этими двумя величинами осуществляется в соответствии с законом Гука:
![]()
где Р — сила — входная величина упругого элемента; ε — относительная деформация — выходная величина упругого элемента; sp — площадь поперечного сечения упругого элемента; Е — мо-дуль упругости материала упругого элемента.
В данном случае константой, характеризующей упругий элемент, является 1/spЕ.
Рассматривая физические процессы во всех известных измерительных преобразователях, можно в каждом случае установить связь между выходной и входной величинами:
![]()
Математическое (или графическое) описание этой связи носит название функции преобразования преобразователя. Аналогичная характеристика для датчика в целом называется функцией преобразования датчика.
Отношение изменения выходной величины ΔY к соответствующему изменению входной величины ΔX называется чувствительностью датчика:
![]() .
.
В общем случае функция преобразования может быть нелинейной, тогда чувствительность является функцией входной величины и для любого Xi определяется как:
![]() при
X
= Xi.
при
X
= Xi.
В пределе функция чувствительности определяется как первая производная Y по X.
Отношение значения выходной величины датчика Yi к соответствующему значению входной величины X, определяет коэффициентом преобразования:
![]() .
.
Если зависимость между выходной и входной величинами является линейной, то чувствительность преобразователя не зависит от входной величины:
![]() .
.
В этом случае чувствительность и коэффициент преобразования поэтому для линейных датчиков, а таковыми являются большинство датчиков механических величин.
Датчик, выполненный в соответствии со структурной схемой (ниже), называется датчиком прямого преобразования. Чувствительность такого датчика определяется произведением чувствительностей отдельных преобразователей:
![]()
и может быть найдена как отношение выходной величины датчика к входной (для линейной функции преобразования):
![]() .
.
Так для мембранного датчика давления со стержневым упругим элементом, выходной величиной которого является относительная деформация, функция преобразования:
![]() .
.
Структурная схема датчика прямого преобразования:

При этом чувствительность датчика будет:
![]() ,
,
т.е. определяется чувствительностями мембраны и упругого элемента.
Однако структурная схема датчика прямого преобразования не охватывает всего многообразия датчиков.
В последнее время все более внедряются в практику измерений датчики уравновешивающего преобразования.
Структурная схема
датчика уравновешивающего преобразования: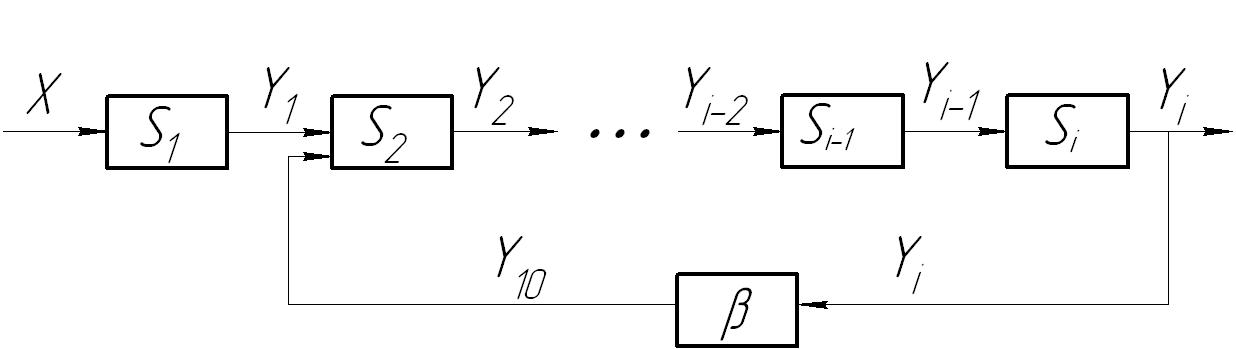
Отличительной особенностью схемы такого датчика по сравнению со схемой датчика прямого преобразования является то, что в ней имеются цепи прямого и обратного преобразования.
Цепь обратного преобразования включает в себя обратный преобразователь с чувствительностью β и может в общем случае состоять из нескольких измерительных преобразователей и охватывать какое угодно число преобразователей, стоящих в цепи прямого преобразования. Эта цепь обеспечивает преобразование выходной величины цепи прямого преобразования в однородную с входной величиной (чаще всего электрической величины в неэлектрическую).
Функция преобразования участка цепи с обратной связью:
![]() ,
,
где Sy = S0/(1 + S0β) — чувствительность цепи уравновешивающего преобразования; S0 = S2S3…Si-1Si — чувствительность цепи прямого преобразования, охваченной цепью обратного преобразования; β — чувствительность цепи обратного преобразования.
Тогда функция преобразования датчика с уравновешивающими преобразованием:
![]() ,
,
где Sпр = S1Si-1…Sn-1Sn — чувствительность цепи прямого преобразования, не охваченной цепью обратного преобразования.
Введение обратного преобразователя в структурную схему датчика качественно изменяет его функцию преобразования, а следовательно, и выходные характеристики.
В данном случае происходит своего рода трансформация чувствительности в точность. Действительно, как следует из сравнения чувствительностей, чувствительность уравновешивающего преобразования в (1 + S0β) раз меньше, чем чувствительность прямого преобразования, а погрешность цепи уравновешивающего преобразования.
![]() ,
,
где γ — погрешность цепи прямого преобразования; γ0 — погрешность цепи обратного преобразования; а = 1/(1 + S0β) — относительная недокомпенсация.
Таким образом, введение обратного преобразователя в структурную схему датчика дает уменьшение погрешности цепи прямого преобразования. При S0β > 1 погрешность цепи уравновешивающего преобразования определяется только погрешностью цепи обратного преобразования, поэтому цепь β должна быть очень стабильной. В этом специфика рассматриваемой структурной схемы.
Практически при построении датчиков аппаратуры приходится сталкиваться еще с одной разновидностью структурной схемы — с параллельным соединением измерительных преобразователей, в которых преобразование измеряемой величины происходит в прямом направлении.
Например, подавляющее большинство тензорезисторных датчиков выполняют так, чтобы использовать четыре рабочих тензорезистора. Это позволяет увеличить выходной сигнал датчика. В таком случае четыре одинаковых измерительных преобразователя — тензорезистора — имеют одну и ту же входную величину — деформацию упругого элемента. Тензорезисторы, включенные в мостовую измерительную цепь, имеют выходные сигналы, характеризуемые относительным изменением сопротивления. Эти сигналы суммируются измерительной цепью и преобразуются в величину выходного напряжения. Такое преобразование применяют и в других типах датчиков.
Функция преобразования датчика, выполненного в соответствии с этой схемой, имеет вид:
![]()
или:
![]() ,
,
где
![]() — чувствительность цепи прямого
последовательного преобразования;
— чувствительность цепи прямого
последовательного преобразования;
![]() — чувствительность прямого параллельного
преобразования.
— чувствительность прямого параллельного
преобразования.
Чувствительность прямого параллельного преобразования равна сумме чувствительностей преобразователей, включенных параллельно.
Представленные три типа структурных схем датчиков позволяют на основе ограниченного числа измерительных преобразователей описать все многообразие датчиковой аппаратуры, построенной в соответствии с той или иной структурной схемой. Синтезируя, измерительные преобразователи по вышеприведенным схемам, можно получить функцию преобразования любого датчика и по известным характеристикам измерительных преобразователей определить характеристики датчика в соответствии с его функцией преобразования.