

Измерительные преобразователи компенсационного типа
Отдельные звенья структурной схемы рис.1.1а могут представлять собой более простые ИП. С целью повышения точности некоторые из них охватывают ООС, т.е. выполняют по компенсационной схеме. Такие ИП будем называть компенсационными.
Входными сигналами ИП электрических величин являются чаще всего сигналы напряжения или тока.
В случаях входных сигналов напряжения используют два основных вида ООС – последовательную и параллельную; в случае сигналов тока ООС обычно бывают параллельной.
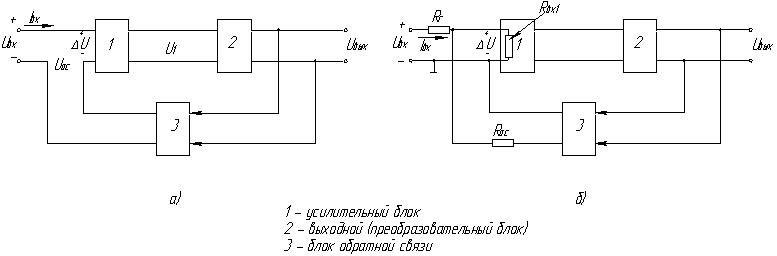
Компенсационные ИП (КИП) могут быть статическими и астатическими.
![]() ;
;
![]() ;
;
![]() ,
(1.6)
,
(1.6)
где
![]() ,
,
![]() ,
,
![]() ,
,
![]() - коэффициенты преобразования и смещения
характеристик преобразования
соответствующих блоков.
- коэффициенты преобразования и смещения
характеристик преобразования
соответствующих блоков.
Для выходных
сигналов КИП из (1.6) нетрудно получить
![]() ,
где
,
где
![]() - результирующее смещение характеристики
преобразования;
- результирующее смещение характеристики
преобразования;
![]() ;
;
![]() - коэффициент усиления разомкнутой
системы;
- коэффициент усиления разомкнутой
системы;
![]() ;
;
![]() для схемы рис. 1.2а и
для схемы рис. 1.2а и
![]() ;
;
![]() для схемы рис. 1.2б.
для схемы рис. 1.2б.
![]() ;
;
![]() -
входное сопротивление блока 1.
-
входное сопротивление блока 1.
В случае отсутствия
в структурной схеме КИП какого-либо
блока следует принять для него
![]() ,
а
,
а
![]()
![]() .
.
(при
![]() )
)
![]() .
.
![]() ,
,
![]() ,
,
 ,
где
,
где
![]() ,
,
![]() ,
,
![]() - относительное изменение
- относительное изменение
![]() ,
,
![]() и
и
![]() .
.
![]() ,
,
![]() ,
,
![]() ,
где
,
где
![]() ,
,
![]() .
.
Масштабирующие преобразователи тока и напряжения на операционных усилителях
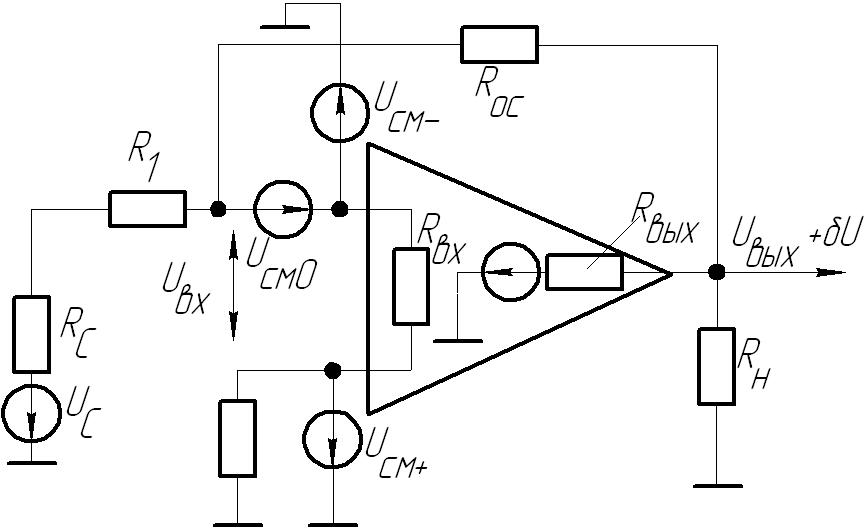
На входе прибора обычно включают измерительный преобразователь, осуществляющий преобразование измеряемой аналоговой величины в цифровой сигнал. В качестве вых сигнала выбирают напряжение постоянного тока в пределах 5…10 В.
Операционный усилитель включенный по схеме инвертора:
Существует понятие
идеального Операционного усилителя, у
которого входные токи
![]() ,
сопротивления
,
сопротивления
![]() ,
Ky
высок. Коэффициент усиления с разомкнутой
обратной связью равен бесконечности.
,
Ky
высок. Коэффициент усиления с разомкнутой
обратной связью равен бесконечности.
В этих условиях
ток источника сигнал
![]() не может протекать по входным цепям ОС.
Таким образом этот ток будет протекать
только по резистору обратной связи.
не может протекать по входным цепям ОС.
Таким образом этот ток будет протекать
только по резистору обратной связи.
В этом случае на Rос создается напряжение:
![]() .
.
При этом:
![]() .
.
Коэффициент
обратной связи:
![]() .
.
Таким образом, для
идеального операционного усилителя
коэффициент усиления практически
полностью определяется соотношением
значений резисторов
![]() ,
при условии, что идеальный источник
сигнала имеет Rc=0.
,
при условии, что идеальный источник
сигнала имеет Rc=0.
В реальных операционных усилителях погрешность инвертирующего усилителя определяется величинами Uсм0, а также Iвх+, Iвх1 и конечным значением K0.
С учетом этих факторов выходное напряжение инвертирующего усилителя равно:
 .
.
Уменьшить погрешность усилителя можно за счет применения усилителя с меньшими входными токами и с большим коэффициентом усиления, а также за счет уменьшения сопротивлений R1, R2, Rос при обеспечении равенства:
![]() .
.
Входное сопротивление инвертирующего ОУ практически равно R1, поэтому при проектировании измерителей тока R1 = Rвх. Измеряемый ток от источника тока протекает через резистор Rос и напряжение на выходе усилителя:
![]() /
/
Нижний предел измеряемого тока ограничивается наличием тока смещения iсм-. При работе с источником тока Rc >> Rос, поэтому усиление по напряжению такой схемы равно:
![]() ,
,
т.е. погрешность из-за наличия напряжения смещения нуля мала.
При измерении малых токов сопротивление Rос должно быть достаточно велико и шумовые токи внести значительные погрешности в выходной сигнал. Поэтому обычно параллельно резистору Rос включают конденсатор, снижающий уровень высокочастотных шумов.
Для построения цифровых вольтметров часто применяется неинвертирующее включение операционного усилителя.
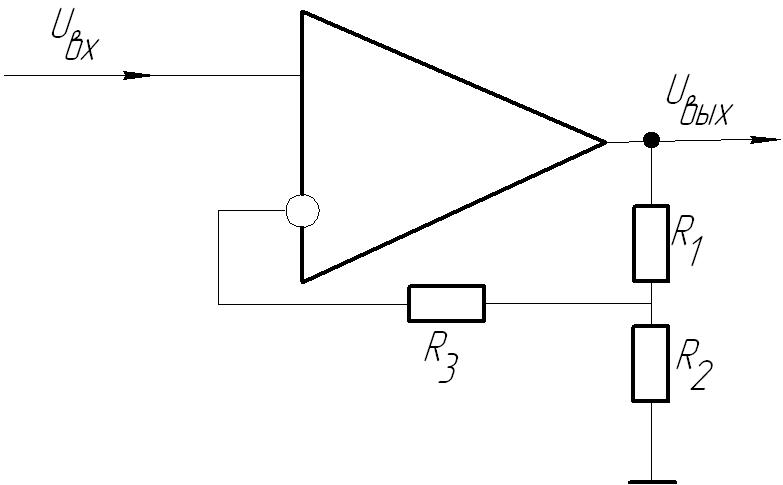
В этой схеме
напряжение обратной связи Uос
определяется как:
![]() .
.
Идеальный усилитель в этой схеме включения имеет коэффициент усиления по напряжению:
![]() .
.
Входное сопротивление
неинвертирующего усилителя достаточно
велико:
![]() .
.
В большинстве случаев погрешности, вызванные сопротивлением источника сигнала, определяются не входным сопротивлением усилителя, а наличием входных токов iсм+ и iсм-, которые создают падение напряжения на внутреннем сопротивлении источника сигнала. Для уменьшения влияния температурного дрейфа входных токов необходимо выбирать сопротивление резистора R3 = R1||R2.