

4.3 Розрахунок клинопасової передачі.
Згідно завдання передача здійснюється клиновим пасом з передавальним відношенням u = 1,12.
Вихідні дані вибираємо з результатів кінематичного розрахунку (табл.4):
Рвщ = Р1 = 3,95 кВт ;
Твщ = Т1 = 39,7 Нм;
nвщ = n1 = 950 мін-1
uрп = 1,12.
Передбачається, що міжосьова відстань регулюється переміщенням електродвигуна на салазках. Робота двозмінна. Кут нахилу лінії центрів шківів до горизонту приблизно 10о.
Відповідно до моменту Т1 = 39,7 Нм вибираємо для передачі пас нормального перетину Б з параметрами: базова довжина 1о = 2240 мм, мінімальний діаметр шківа 125 мм (табл.79,83 [1]).
Призначається діаметр меншого шківа:
d1= 180 мм (табл.83 [1]).
Орієнтовний діаметр великого шківа
d2 = Uпnd1 = 1,12 х 180 = 201,6 мм
Із стандартного ряду (стр.273) призначається d2 = 200 мм.
Фактичне передавальне відношення передачі

де ε = 0,015 (табл.80).

ΔU < [ΔU] = 4%.
Призначаємо орієнтовну міжосьову відстань передачі
ар = 1,45d2 = 1,45 х 200 = 290 мм (табл.81) .
Розрахунок орієнтовної довжини ременя

Приймаємо 1р= 1180 мм (найближче значення табл.82).
4.2.7 Дійсна міжосьова відстань

де ω = 0,5· 3,14(d1+d2) = 0,5·3,14(180 + 200)= 596,6 мм;
у =0,25(d2 - d1)2 = 0,25(200 - 180) 2 = 100 мм.
Межі регулювання
amin = а – 0,01·lр = 291,5 – 0,01· 1180 = 279,7 мм;
amax = а + 0,01·lр = 277 + 0,01· 1180 = 303,5 мм.
4.2.8 Кут обхвату пасом меншого шківа

α1 >[α] = 120о, що відповідає рекомендаціям формули (112) [1].
Оцінка довговічності паса по числу пробігів по контуру в одиницю часу
Визначаємо швидкість ременя

i = V/lp = 8,95*103/1180 = 7,58 с-1
i < [i] = 12 с-1 – довговічність забезпечена.
Потужність, що допускається, що передається клиновим пасом

де р0 = 3,15 кВт – потужність, що передається клиновим пасом, знаходимо по табл.83 (при перетині Б; d1 = 180 мм; V= 8,95 м/с);
С α = 1-0,003(180 – α1)= 1 - 0,003(180 –176)= 0,988;
Ср = 1,1 (табл.76; режим роботи середній; робота однозмінна).
4.2.11 Потрібне число клинових пасів
Z =P1/[P] = 3,95/2,61 = 1,51.
Приймаємо Z = 2.
4.2.12 Розміри для викреслювання профілю шківа (табл.86).
С = 4,2 мм; 1 = 14 мм; t = 19 мм; S = 18,5 мм; φо = 36о;
Ширина шківа
Вш =(Z - 1)t + 2S = ( 2 - 1)19 +2×18,5 = 56 мм.
4.2.13 Сила попереднього натягнення пасів

4.2.14 Сила, що діє на вали пасової передачі
Q =2Fo sin(α1/2)= 2×385,5sin(176/2) = 770 Н.
4.4 Вибір мувп
Вибираємо вихідні дані з результатів кінематичного розрахунку табл.4, завдання на курсове проектування і загальних міркувань з аналізу призначення приводу:
Рвих = Рмуф = Р1 = 3,95 кВт
nвих = nмуф =n1 = 121,17 хв-1
Твих = Тмуф = Т1 = 275 Нм
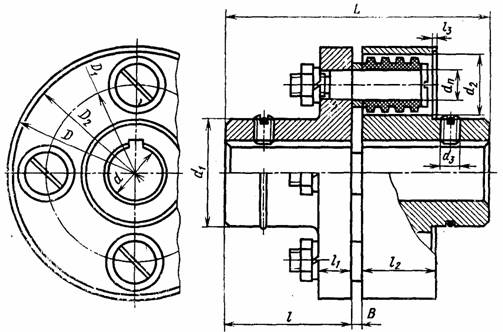
Малюнок 2 – Ескіз МУВП
Таблиця 5 – характеристика МУВП
Т |
d |
D |
L |
l |
D1 |
z |
l1 |
l2 |
D2 |
d1 |
l3 |
B |
dп |
500 |
40 |
170 |
225 |
110 |
130 |
8 |
18 |
32 |
160 |
80 |
2 |
5 |
14 |
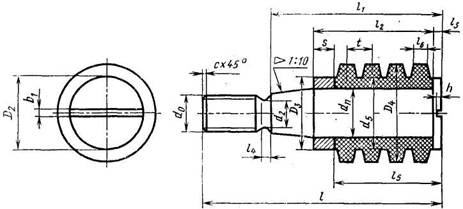
Малюнок 3 – схема пальця МУВП-500-40–1 УЗ ГОСТ 21424–93
Таблиця 6 – характеристики пальця
dп |
D2 |
l |
d0 |
d2 |
l1 |
l2 |
l3 |
l4 |
h |
bl |
c |
D3 |
s |
d5 |
D4 |
l5 |
l6 |
t |
14 |
20 |
66 |
M10 |
7.8 |
47 |
33 |
2 |
4 |
1.5 |
2 |
1.6 |
20 |
5 |
20 |
26 |
28 |
3.5 |
7 |