

Расчет реакции гироскопа на заданный тестовый входной сигнал
Цель
данного этапа исследований – увидеть,
как меняется сигнал на выходе гироскопа
 при быстых (резких) и медленных (плавных)
изменениях измеряемой угловой скорости
при быстых (резких) и медленных (плавных)
изменениях измеряемой угловой скорости
 .
.
Для
проведения такого анализа задается
некоторый тестовый закон изменения
входного сигнала
по времени и рассчитываются реакции
линейной и нелинейной моделей гироскопа
на этот сигнал.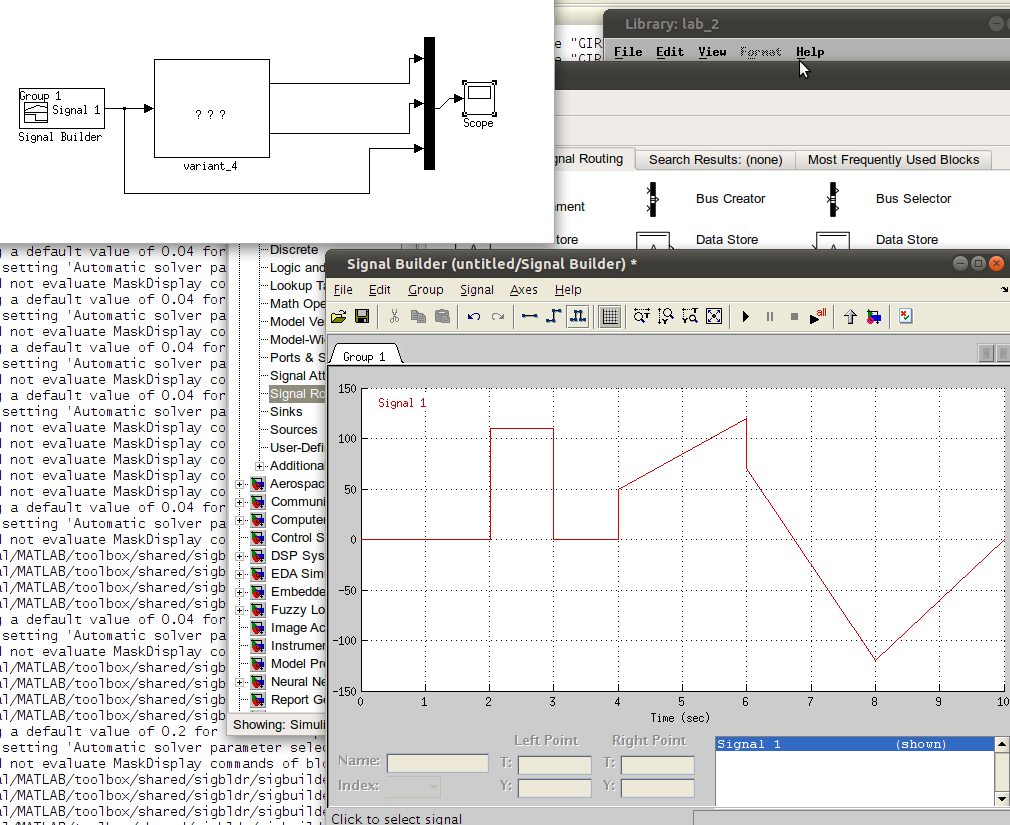
Входной тестовый сигнал формируется с использованием блока Signal Builder (построитель сигнала), который берется из раздела Sources (источники сигналов), и Gain (усилитель сигнала), который берется из раздела Math Operations (математические действия).
Чтобы сравнивать входной сигнал и соответствующие ему выходы линейной и нелинейной моделей, все три сигнала строятся на одном графике. Такое построение достигается с использованием блока Mux.
Входной текстовый сигнал формируется в окне блока Signal Builder.
Формирование сигнала в этом окне выполняется в следующей последовательности:
На линейке команд окна выбираем кнопку Axes/Change time range (Оси/Изменить интервал времени) и задаем требуемый интервал времени моделирования (в нашем случае от 0 до 10 сек).
Командой Axes/Set Y display limit (задать диапазон отображения сигнала по оси Y) задаем диапазон возможных значений сигнала на выходе блока.
Нажав на клавиатуре клавишу Shift и кликнув мышью на оси времени, намечаем точки изломов на линейных участках сигнала.
Двигая с помощью мыши точки или участки между точками, формируем требуемый профиль входного тестового сигнала.
 Чтобы
сравнивать входной и выходные сигналы
на одном графике, в программе используется
блок Mux
из раздела Signal
Routing.
Этот блок используется для объединения
трех скалярных сигналов (входа и двух
выходов гироскопа) в один векторный
сигнал, состоящий из трех компонентов,
который подается в блок построения
графиков Scope.
Чтобы
сравнивать входной и выходные сигналы
на одном графике, в программе используется
блок Mux
из раздела Signal
Routing.
Этот блок используется для объединения
трех скалярных сигналов (входа и двух
выходов гироскопа) в один векторный
сигнал, состоящий из трех компонентов,
который подается в блок построения
графиков Scope.
График при анализе входа и выхода гироскопа по времени.
Моделирование функционирования скоростного гироскопа с оцененными параметрами модели
Целью данного этапа исследований является сопоставление переходных процессов на выходе модели гироскопа, заданной в виде «черного ящика», и аналогичной модели с параметрами, оцененными на этапах 1-2 выполнения задания. В
результате сопоставления можно увидеть, насколько точно были оценены параметры модели гироскопа по результатам расчета статической характеристики и переходных процессов.
Для получения графиков следует сформировать программу моделирования, показанную на рисунке. Параметры тестирующей модели rate gyro test model задаются в окне настройки. С помощью составленной программы сопоставим переходные процессы в системе. При значительном расхождении следует добиться приблизительного соответствия графиков переходных процессов в нелинейных моделях варьированием значения постоянной времени Т и коэффициента демпфирования гироскопа в окне настройки тестовой модели.
Параметры |
Стат.хар-ки |
Переходный процесс |
Уточнённые параметры |
К |
0.4 |
|
|
Umin зона нечувст-ти |
0.12 |
0.12 |
|
Umax насыщ |
36 |
36 |
36 |
Wвх |
93 град/с |
93 |
93 |
Uзаброс |
|
37.5 |
37.5 |
Uуст |
|
37 |
37 |
σ |
|
1.3 |
1.3 |
Ξ |
|
0.87 |
0.87 |
Tп.п. |
|
0.65 |
0.65 |
T |
|
0.16 |
0.07 |
|
|
|
|

Министерство образования и науки Российской Федерации
Государственное образовательное учреждение высшего
профессионального образования
«Московский авиационный институт»
(национальный исследовательский университет) (МАИ)
Кафедра «Системный анализ и управление»