

Цель работы
Целью лабораторной работы является изучение устройства, принципа работы, краткой теории скоростного гироскопа и анализ статической и динамических характеристик гироскопа с помощью математических моделей функционирования прибора, составленных в системе программирования Матлаб.
Задание
Порядок выполнения работы:
Лабораторная работа выполняется бригадами на компьютерах. Для упрощения формирования имитационных моделей в приложении Simulink создана дополнительная библиотека lab_2. Библиотека содержит варианты заданий (модели скоростных гироскопов с разными параметрами в виде «черных ящиков») и другие блоки, необходимые для выполнения работы. В случае необходимости студент может самостоятельно найти необходимые блоки в основных библиотеках Simulink. Бригада выполняет вариант задания, выдаваемый преподавателем. Варианты различаются исходными данными для проведения расчетов.
Все расчеты проводятся в системе программирования Matlab с использованием пакета визуального программирования Simulink.
Предполагается, что начальные навыки работы в Matlab и Simulink были получены студентами при выполнении первой лабораторной работы по данной дисциплине.
Требуется:
Рассчитать и построить статические характеристики гироскопа при линейной и нелинейной моделях гироскопа. Сравнить и объяснить полученные решения.
Рассчитать и построить переходные процессы гироскопа при линейной и нелинейной моделях гироскопа при трех значениях входного сигнала:
 ;
;
 ;
;
Сравнить и объяснить полученные решения.
Рассчитать и построить графики реакций гироскопа на заданный текстовый сигнал при линейной и нелинейной моделях гироскопа. Сравнить полученные решения.
Используя результаты, полученные при выполнении первых двух пунктов задания, оценить параметры модели гироскопа для выданного варианта.
Рассчитать и построить переходный процесс для модели гироскопа с оцененными параметрами, используя для этого тестовую модель rate test model, находящуюся в той же библиотеке lab_2. Сравнить полученный график с переходным процессом для заданного варианта и, при необходимости, варьированием постоянной времени и коэффициента демпфирования добиться соответствия статических характеристик и переходных процессов на выходе заданной и оцененной моделей.
Методика выполнения работы
Расчет статической характеристики гироскопа
Выполним следующие действия:
Запустить MATLAB.
Открыть приложение Simulink.
Открыть библиотеку lab_2.
Создать программу заданного варианта модели.
Статическая характеристика гироскопа строится путем задания на вход модели гироскопа медленно меняющегося входного воздействия, линейно возрастающего в рабочем диапазоне угловых скоростей ЛА.
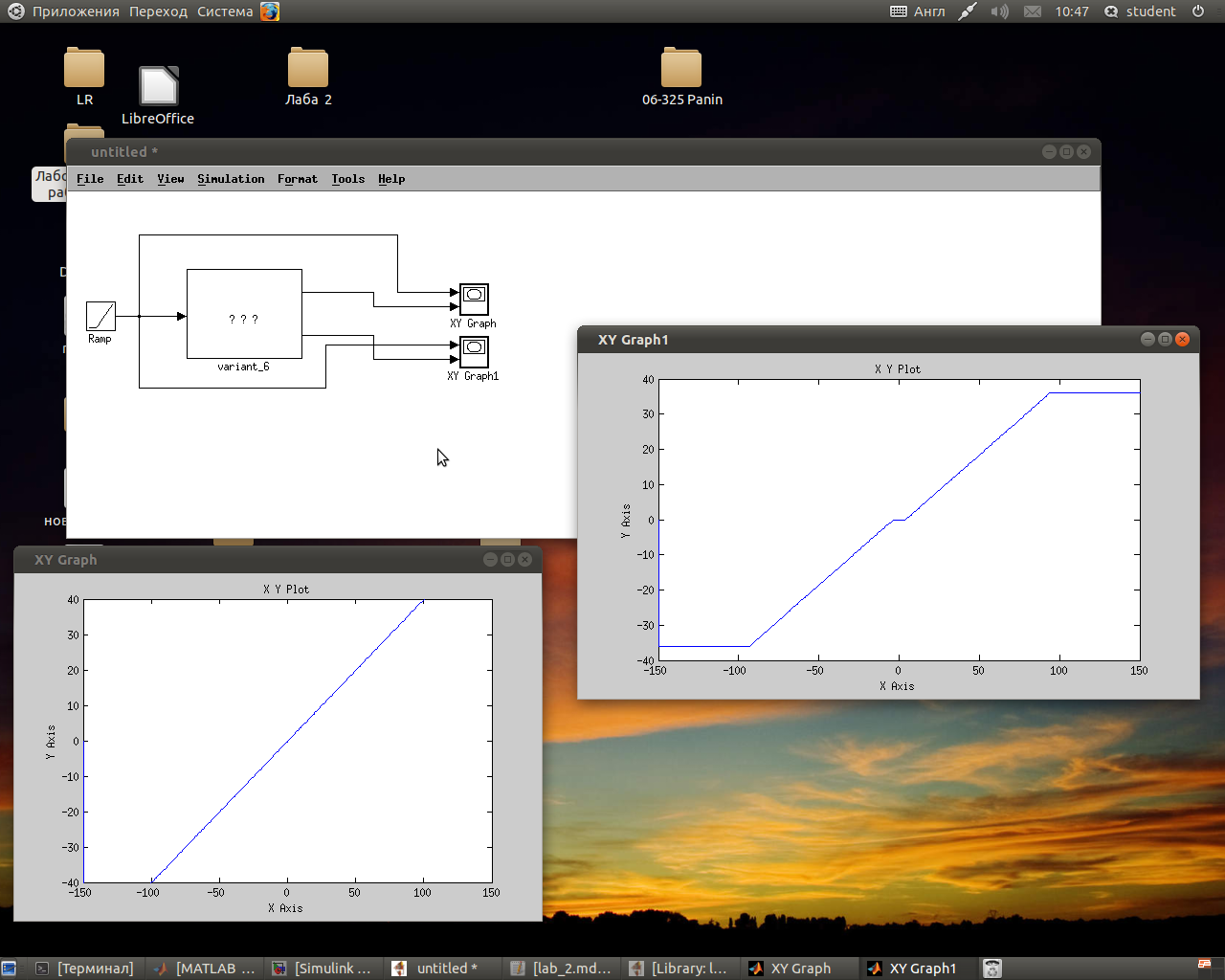 Программа
моделирования приведена на рисунке. В
ней помимо блоков, реализующих модель
самой системы, присутствует блок Ramp
на входе и два блока XY
Graph
для построения графиков статической
характеристики для линейной и нелинейной
моделей гироскопа.
Программа
моделирования приведена на рисунке. В
ней помимо блоков, реализующих модель
самой системы, присутствует блок Ramp
на входе и два блока XY
Graph
для построения графиков статической
характеристики для линейной и нелинейной
моделей гироскопа.
Блок Ramp (линейно возрастающий сигнал) берется из библиотеки lab_2 или из раздела Sources (Входы) библиотеки блоков пакета Simulink. В верхней строке данного окна задается коэффициент k наклона линейной характеристики (Slope); в третьей – начальное значение сигнала на выходе блока (Initial output).
Блоки
XY
Graph
берутся из библиотеки lab_2
или из раздела Sinks
(Выходы) библиотеки блоков Simulink.
Они служат для построения зависимости
 на основе данных
на основе данных
 и
и
 .
.
Полученные графики статических характеристик для линейной и нелинейной моделей гироскопа следует перерисовать и сравнить друг с другом. Сделать выводы о влиянии нелинейностей на статическую характеристику прибора.
Используя
статическую характеристику линейной
модели, по формуле рассчитать коэффициент
усиления скоростного гироскопа:
 ,
где
,
где
 - снимаемое с графика выходное напряжение,
соответствующее произвольно выбранному
знанию угловой скорости
- снимаемое с графика выходное напряжение,
соответствующее произвольно выбранному
знанию угловой скорости
 .
Используя статическую характеристику
нелинейной модели, определить числовые
значения параметров
.
Используя статическую характеристику
нелинейной модели, определить числовые
значения параметров
 ,
,
 для линейностей прибора.
для линейностей прибора.
Построение переходных процессов
Переходный процесс гироскопа можно построить, подав на вход модели гироскопа ступенчатое воздействие и наблюдая реакцию с помощью блока Scope.
Для линейной системы вид переходного процесса не зависит от величины входного воздействия, т.е. изменяется пропорционально величине ступенчатого сигнала. Поэтому при анализе линейных систем переходный процесс строят при единичном входном ступенчатом воздействии l(t).
Для нелинейных систем реакция системы зависит не только от свойств системы, но и от величины ступенчатого воздействия.
Поэтому, чтобы оценить влияние нелинейностей скоростного гироскопа на вид переходного процесса, в работе расчеты следует провести при трех разных значениях ступенчатого входного сигнала:
; ;
Ступенчатое воздействие можно задать двумя способами:
- с помощью блока Step (ступенька);
- с помощью блока Constant (постоянное значение).
Оба этих блока можно взять из библиотеки lab_2 или из раздела Sources библиотеки блоков Simulink. Чтобы сравнить переходные процессы для линейной и нелинейной моделей гироскопа, целесообразно кривые процессов для этих двух моделей построить на одном графике. В Simulink две или несколько скалярных сигналов в один векторный сигнал и подав этот векторный сигнал на вход блока Scope.
Объединение скалярных сигналов в векторный сигнал выполняется с помощью блока Mux из раздела Signal Routing (Стандартные процедуры обработки сигналов) библиотеки блоков Simulink.Инерция скоростного гироскопа, характеризуемая его постоянной времени Т, сравнительно невелика (до 0.1 сек). Поэтому для построения переходного процесса время моделирования можно задать также небольшое, примерно равное (10-20)Т, т.е. 1-2 сек. Это время задается на панели инструментов программы под кнопками Simulation/Simulation Parameters/Stop Time.
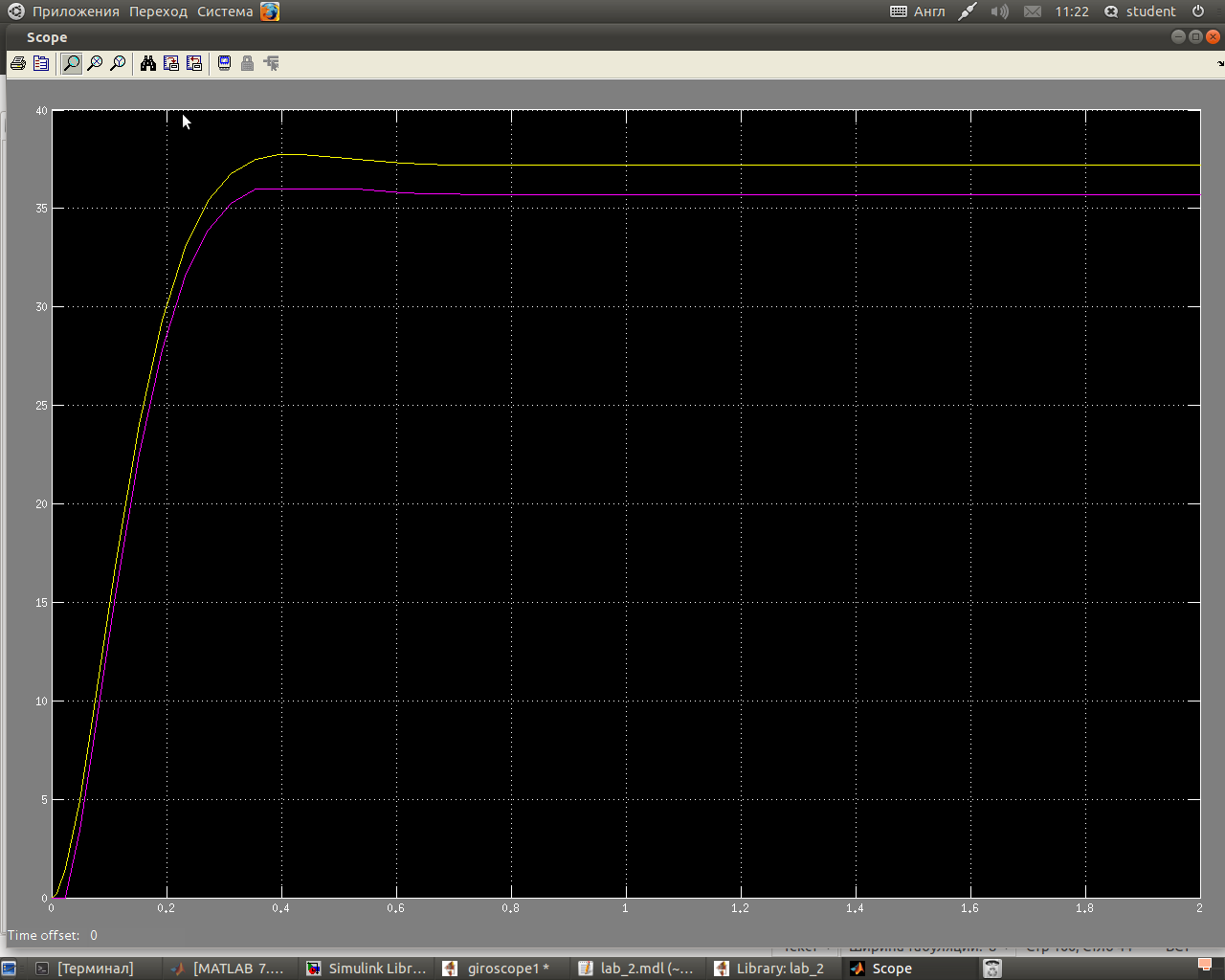 Переходные
процессы скоростного гироскопа при
линейной и нелинейной моделях его
динамики и при входном сигнале
настолько большом, что влияние нелинейности
типа насыщение сказывается на величине
выходного сигнала, приведен на рисунке.
Переходные
процессы скоростного гироскопа при
линейной и нелинейной моделях его
динамики и при входном сигнале
настолько большом, что влияние нелинейности
типа насыщение сказывается на величине
выходного сигнала, приведен на рисунке.
И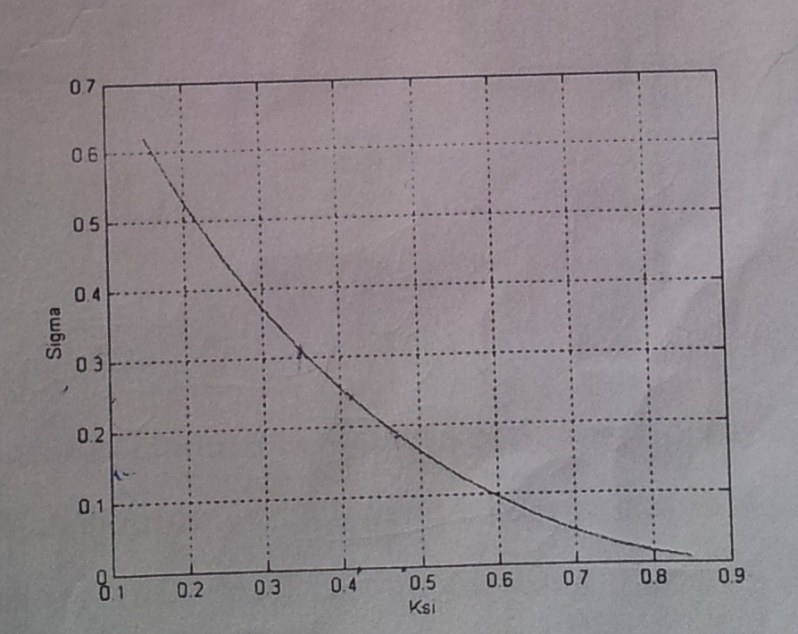 спользуя
полученные графики переходных процессов,
следует оценить постоянную времени Т
и коэффициент демпфирования ξ
колебательного
звена, описывающего динамику гироскопа.
Кроме того, по этим графикам можно
уточнить значения параметров
,
нелинейности гироскопа, полученные
ранее с использованием статической
характеристики гироскопа.
спользуя
полученные графики переходных процессов,
следует оценить постоянную времени Т
и коэффициент демпфирования ξ
колебательного
звена, описывающего динамику гироскопа.
Кроме того, по этим графикам можно
уточнить значения параметров
,
нелинейности гироскопа, полученные
ранее с использованием статической
характеристики гироскопа.
Параметры Т и ξ колебательного звена по графику переходного процесса можно оценить следующим образом.
Соотношение для переходного процесса ходе колебательного звена может быть получено в аналитическом виде:

Используя
это соотношение, можно рассчитать
зависимости времени переходного процесса
 и относительного перерегулирования
и относительного перерегулирования
 и коэффициент демпфирования
и коэффициент демпфирования
 связаны друг с другом зависимостью:
связаны друг с другом зависимостью:
где
 максимальное
напряжение на выходе гироскопа в
переходном процессе;
максимальное
напряжение на выходе гироскопа в
переходном процессе; - напряжение на выходе гироскопа в
установившемся режиме.
- напряжение на выходе гироскопа в
установившемся режиме.
Время
переходного процесса
при
 приближенно равно 4Т.
приближенно равно 4Т.
Используя
эти зависимости, можно найти приближенные
оценки параметров
 по значениям
и
,
снятым с графика переходного процесса
на выходе линейной модели гироскопа.
по значениям
и
,
снятым с графика переходного процесса
на выходе линейной модели гироскопа.