

2.5.1Розрахунок та моделювання перехідних процесів в замкненій системі по схемі підлеглого керування
2.5.2 Розрахунок регулятора струму
Регулювання параметрів здійснюється послідовно.Кожному регулюючому параметру відповідає свій регулятор. Сигнал кожного наступного регульованого параметра відповідає виходу попереднього параметра. Тому регулювання кожної координати підпорядковане регулюванню попередньої. Ця система дозволяє налаштовувати кожен параметр окремо, починаючи з внутрішнього. В основі вибору регулятора лежить задача компромісного підвищення швидкодії об’єкта і його частин до
гранично допустимого при мінімальному пере регулюванні . Структурна схема підлеглого керування наведено на рис.2.19

Рисунок 2.19- Структурна схема підлеглого керування е лектроприводу в системі АВК
Визначаємо коефіцієнт підсилення по струму і швидкості:
 (2.72)
(2.72)
 (2.73)
(2.73)
 (2.74)
(2.74)
 (2.75)
(2.75)
 (2.76)
(2.76)
 (2.77)
(2.77)
Розрахунок починаємо з оптимізації внутрішнього контуру. Так як
Тм 4Те
то допустимо розглядати схему двигуна
без урахування внутрішнього зворотного
зв’язку бо швидкість зміни струму
набагато вища ніж при зміні частоти
обертання. Контур струму двигуна
налагоджується на модульний оптимум
(МО), через що передавальна функція
регулятору струму визначається:
4Те
то допустимо розглядати схему двигуна
без урахування внутрішнього зворотного
зв’язку бо швидкість зміни струму
набагато вища ніж при зміні частоти
обертання. Контур струму двигуна
налагоджується на модульний оптимум
(МО), через що передавальна функція
регулятору струму визначається:
 (2.78)
(2.78)
де kп – коефіцієнт підсилення тиристорного збуджувача генератору;
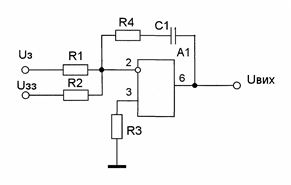
Рисунок 2.20 – Схема регулятора струму
Re=0.4,Te=0.3125–
опір і стала часу якірного кола
двигуна;Т =0.01c–
постійна часу тиристорного збуджувача
.
=0.01c–
постійна часу тиристорного збуджувача
.
ПІ-регулятор має елементи: Rзн– вхідний опір регулятора по завданню напруги каналу, Rн – вхідний опір регулятора по зворотному зв’язку напруги; Сззн – ємність регулятора по зворотному зв’язку напруги.
Приймаючи Сззн = 0,5 – 5 мкФ, можна знайти:
 (2.79)
(2.79)
Вхідні опори регулятора напруги по завданню і зворотному зв’язку визначаються:
 (2.80)
(2.80)
2.4.6 Розрахунок регулятора швидкості для статичних систем
Передаточна функція регулятора швидкості для симетричного оптимуму визначається:
 (2.81)
(2.81)
Потім визначаю опір зворотного зв’язку регулятора:
 (2.82)
(2.82)
На вхід завдання регулятора швидкості для зменшення пере- регулювання необхідно включити фільтр з передавальною функцією:
 (2.83)
(2.83)
З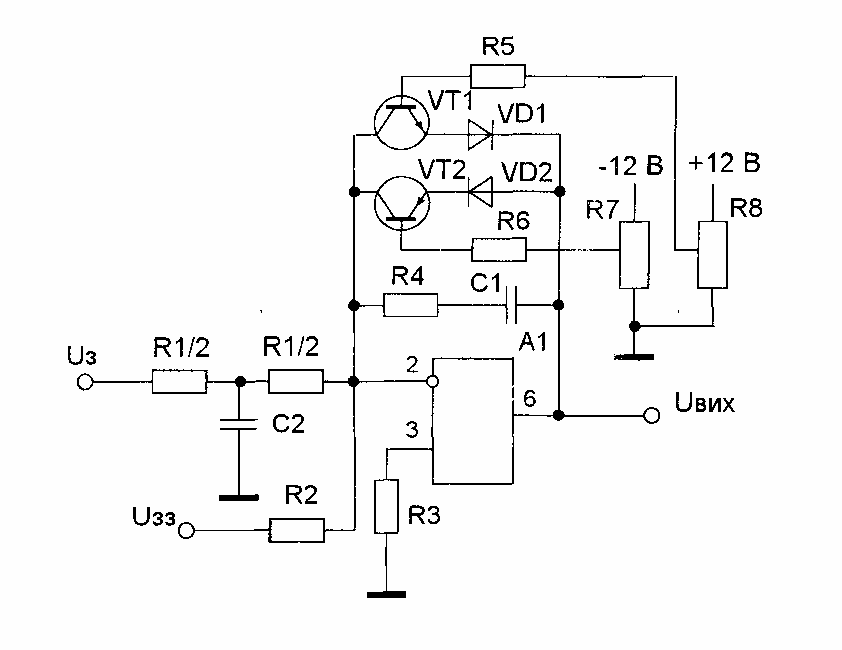 агальний
вигляд П-регулятору швидкості зображено
на рис 2.21
агальний
вигляд П-регулятору швидкості зображено
на рис 2.21
Рисунок 2.21- Схема П-регулятора швидкості
2.4.7 Розрахунок за датчика інтенсивності
Один із засобів обмеження струму є подача в схему задаючої напруги не стрибком, а у вигляді наростаючого трапеціїдального сигналу, причому темп зростання цього сигналу може бути визначений, наприклад, за умовою неперевищення динамічним струмом максимально допустимого. Пристрій що реалізує такий закон управління носить назву задатчик інтенсивності (ЗІ).
 с
(2.84)
с
(2.84)
де Км-коефіцієнт моменту двигуна:
 (2.85)
(2.85)
2.4.8 Побудова структурної моделі замкненої системи по схемі підлеглого керування
Складемо модель системи підлеглого керування за допомогою програмного середовища Mathlab 7.5.Модель зображено на рис.2.22.
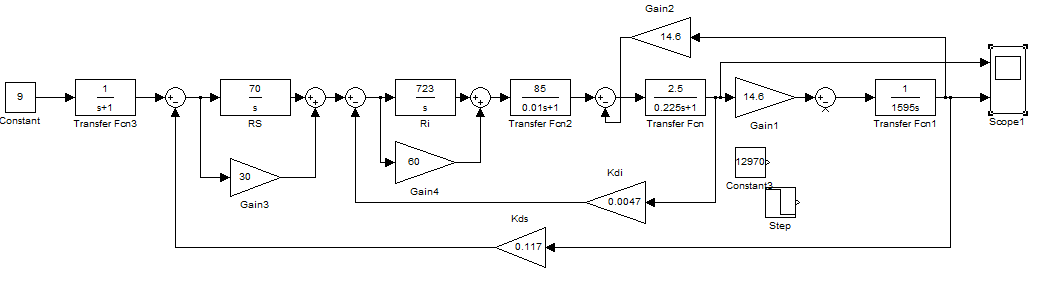
Рисунок 2.22 - Структурна схема підлеглого керування