2.4 Дослідження динамічних режимів роботи електроприводу
2.4.1 Розробка структурної моделі електроприводу
Для подальшого розрахунку перехідних процесів побудуємо структурну модель АВК:
 Рисунок
2.8-Структурна модель АВК
Рисунок
2.8-Структурна модель АВК
Коефіцієнт підсилення перетворювача:
 (2.46)
(2.46)
Електромагнітна постійна часу силового ланцюга:
 (2.46)
(2.46)
Індуктивність двигуна:
 (2.46)
(2.46)
Індуктивність
згладжуючого дроселя:
Індуктивність трансформатора:
 (2.46)
(2.46)
 (2.46)
(2.46)
Коефіцієнт двигуна:
 (2.46)
(2.46)
Коефіцієнт моменту та ЕРС:
 (2.46)
(2.46)
Сумарний момент інерції:
 (2.46)
(2.46)
Механічна постійна часу:
 (2.46)
(2.46)
Для
АВК прийнято
2.4.2 Розробка комп’ютерної моделі АВК
Побудову виконаємо у програмному пакеті Mathlab 7.5. Структурна схема АВК зображено на рис.2.9.
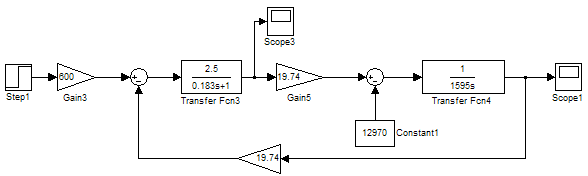 Рисунок
2.9-Структурна модель АВК у середовищі
Mathlab
7.5
Рисунок
2.9-Структурна модель АВК у середовищі
Mathlab
7.5
2.4.3 Моделювання режимів роботи розімкненої системи
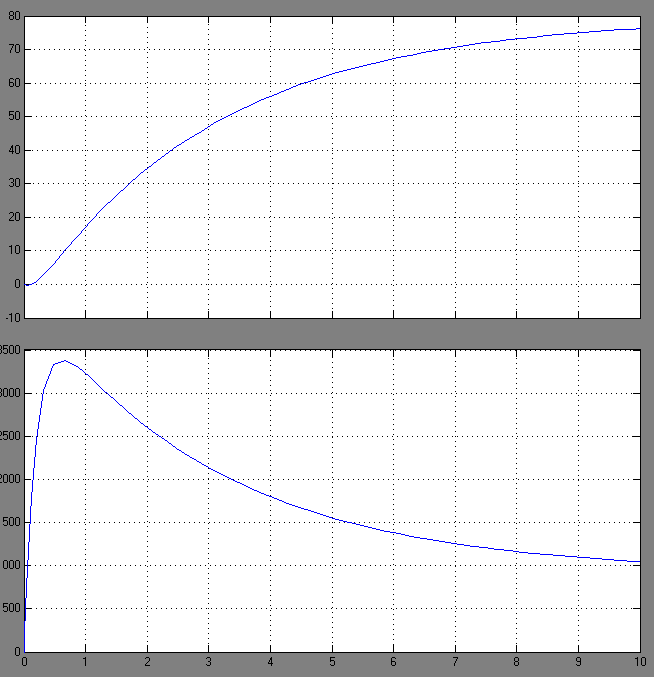
1)Пусковий
режим моделюється при сталих значення
 В,
В,
 .
Графіки перехідних процесів струму та
швидкості зображено на рис.2.10.
.
Графіки перехідних процесів струму та
швидкості зображено на рис.2.10.
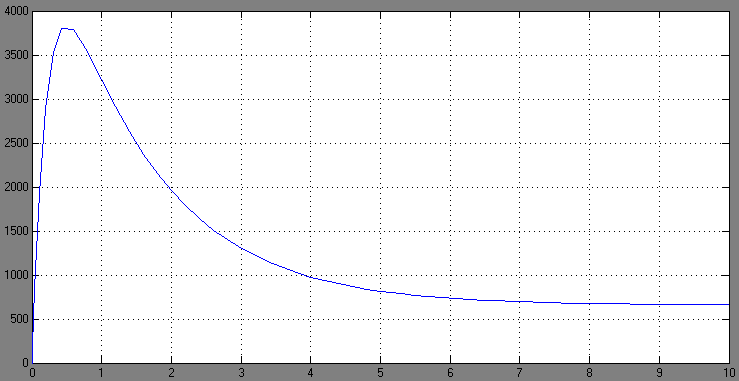
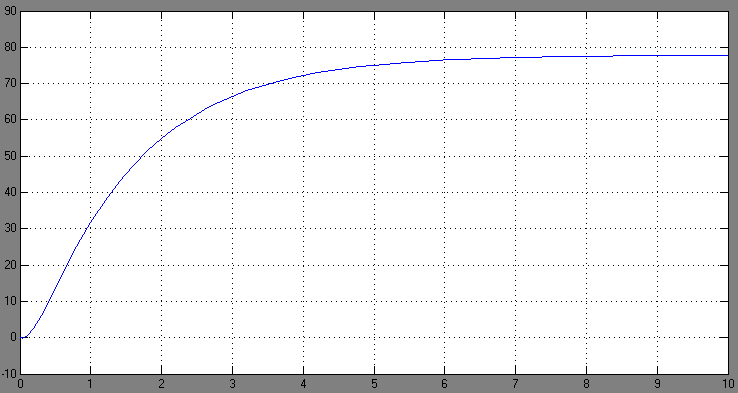
Рисунок
2.10 – Перехідні процеси
 ,
, під час пуску з номінальною напругою і
навантаженням
під час пуску з номінальною напругою і
навантаженням
2)
Режим прискорення моделюється при зміні
 на
на
 і
сталому статичному моменті
.
Графіки перехідних процесів струму та
швидкості зображено на рис.2.11.
і
сталому статичному моменті
.
Графіки перехідних процесів струму та
швидкості зображено на рис.2.11.
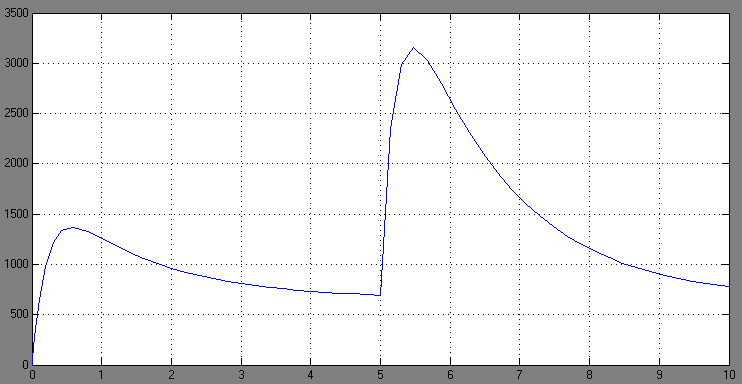
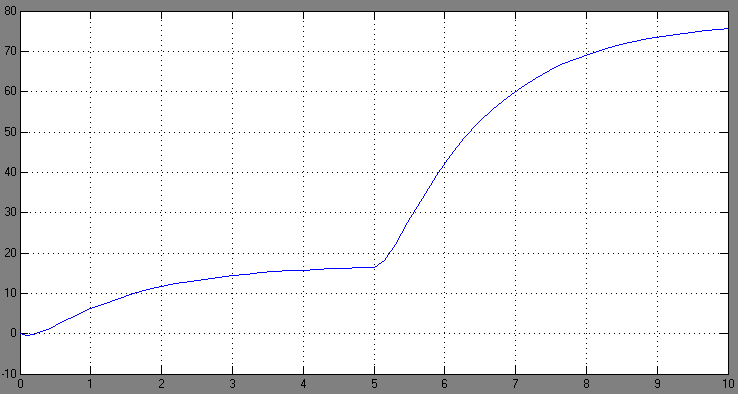
Рисунок 2.11 - Перехідні процеси , при збільшенні напруги і сталим навантаженням
3)Режим
уповільнення моделюється при зміні
 на
на
 і
сталому статичному моменті
.
Графіки перехідних процесів струму та
швидкості зображено на рис.2.12.
і
сталому статичному моменті
.
Графіки перехідних процесів струму та
швидкості зображено на рис.2.12.
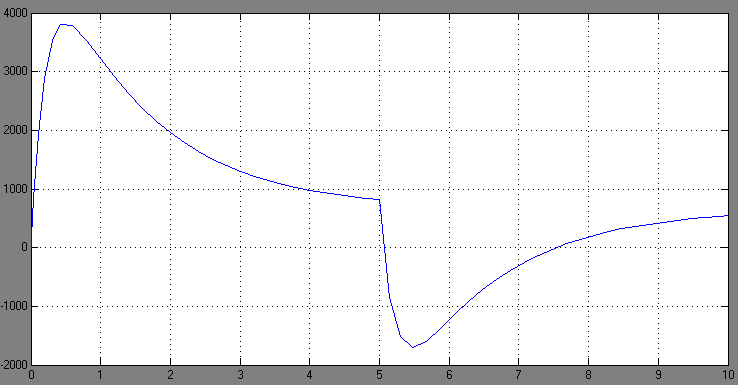

Рисунок 2.12 - Перехідні процеси , при зменшенні напруги і сталим навантаженням
4)
Режим зростання навантаження моделюється
при сталому значенні
 і ступінчатому зростанні статичного
моменту від 0 до
і ступінчатому зростанні статичного
моменту від 0 до
 Графіки
перехідних процесів струму та швидкості
зображено
Графіки
перехідних процесів струму та швидкості
зображено
на рис.2.13.
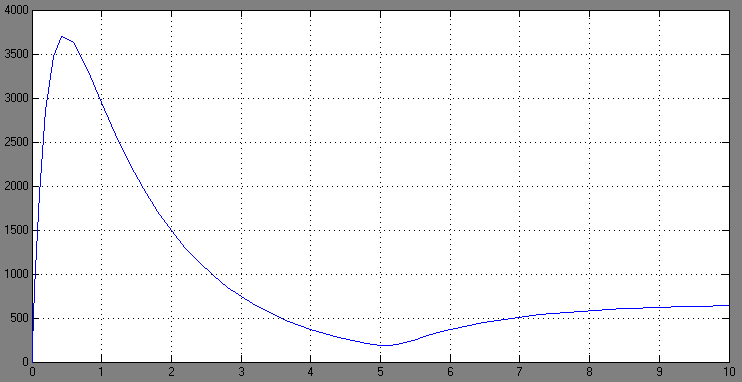
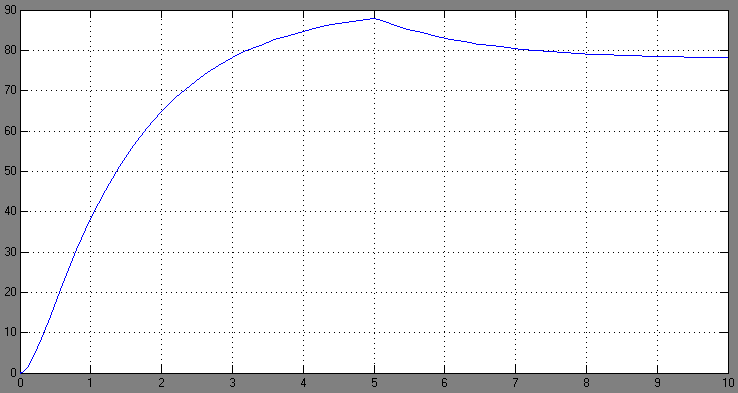
Рисунок 2.13 - Перехідні процеси , при сталій напрузі і збільшенням навантаження
5) Режим зменшення навантаження моделюється при і ступінчатому зменшенні статичного моменту від до 0. Графіки перехідних процесів струму та швидкості зображено на рис.2.14.

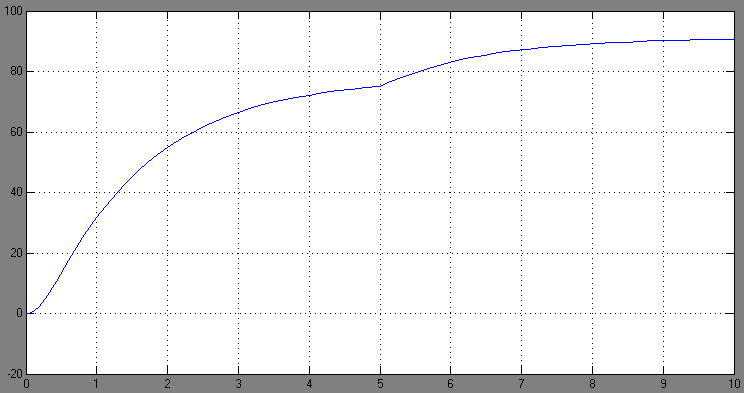
Рисунок 2.14 - Перехідні процеси , при сталій напрузі і зменшенням навантаження
2.4.4. Розрахунок та моделювання перехідних процесів в замкненій системі по схемі з загальним суматором
2.4.5 Розрахунок жорсткого зворотного зв’язку по швидкості
Структурная
схема замкнутої
системи
електроприводу зображено
на рис.2.15.
Рисунок 2.15 - Структурна схема замкненої системи по схемі з загальним суматором
Визначимо параметри жорсткої ОС по швидкості для системи стабілізації швидкості в електроприводі, який забезпечує погрішність регулювання 4% в діапазоні D = 10.Визачимостатизм характеристик:
Статизм характеристик:
 (2.47)
(2.47)
Коефіцієнт ЕРС:
 Вс/рад
(2.48)
Вс/рад
(2.48)
Коефіцієнт передачі двигуна по управлінню:
 рад/Вс
(2.49)
рад/Вс
(2.49)
В якості датчику швидкості використовується тахогенератор постійного струму типу СТ-22з параметрами:
- номінальнанапруга 230В;
-
номінальний
струм якоря
 ;
;
-
номінальна
швидкість ;
;
-
струм збудження
 ;
;
-
опір
якоря
-
опір обмотки збудження
Тахогенератор був обраний з урахуванням умови:
 .
(2.50)
.
(2.50)
Коефіцієнт підсилення тахогенератора:
 Вс/рад (2.51)
Вс/рад (2.51)
Необхідний коефіцієнт підсилення замкнутої системи:
 (2.52)
(2.52)
Коефіцієнт дільника напруги:
 ;
(2.53)
;
(2.53)
Так як коефіцієнт дільника напруги менше одиниці, то на вході тиристорного перетворювача встановлювати електронний підсилювач не потрібно. Опір дільника напруги:
 Ом;
(2.54)
Ом;
(2.54)
В якості ДН приймаєм о дротовий резистор з опором R = 1,2 кОм.
 Ом.
(2.55)
Ом.
(2.55)
2.4.6.Статичний розрахунок струмової відсічки
Виконаємо статичний розрахунок системи що містить зворотний зв'язок по швидкості і по струму з відсічкою. У якості датчик струму використовується датчик активного типу, який містить вимірювальний шунт і проміжний підсилювач.
Знайдемо коефіцієнт підсилення датчика струму:
 В/А
(2.56)
В/А
(2.56)
Вибираємо струм відсічки і струм упору.
 А
(2.57)
А
(2.57)
 А.
(2.58)
А.
(2.58)
Загальний вид датчика струму зображено на рис. 2.16
Рисунок.2.16 - Загальний вигляд датчика струму
Розрахунок уставки нечутливості нелінійного елемента включеного на вихід ДС:
 В
(2.59)
В
(2.59)
НЕ
реалізується двома зустрічно включеними
стабілітронами з напругою пробою
 В.Напруга
перетворювача в режимі стопоріння
приводу з максимальної швидкості
(залишкову напругу тиристорного
перетворювача в режимі упору):
В.Напруга
перетворювача в режимі стопоріння
приводу з максимальної швидкості
(залишкову напругу тиристорного
перетворювача в режимі упору):
 В
(2.60)
В
(2.60)
Відповідна напруга на вході електронного підсилювача дорівнює:
 В
(2.61)
В
(2.61)
Необхідний максимальний сигнал зворотного зв'язку по струму при упорі максимальної швидкості:
 В
(2.62)
В
(2.62)
Приріст виходу датчика струму в період дії струмової відсічки:
 (2.63)
(2.63)
Необхідний коефіцієнт зворотного зв'язку по струму реалізується потенціометричним дільником, скоммутованим на виході нелінійного елемента:
 (2.64)
(2.64)
Оскільки Kост>1,значить необхідно в коло зворотного звязку по струму, після потенціометричного дільника включити підсилювач з КЕУ=10:
 (2.65)
(2.65)
Опір дільника напруги виберемо рівнимRдн=10 кОм, тоді:
 (2.66)
(2.66)
2.4.7.Обмеження форсування замкненої системи
Коефіцієнт посилення системи по керуючому впливу:
 (2.67)
(2.67)
Напруга завдання замкнутої системи:
 (2.68)
(2.68)
Напруга завдання розімкнутої системи:
 (2.69)
(2.69)
Коефіцієнт форсування за напругою:
 (2.70)
(2.70)
Таким чином, вхідний вузол повинен витримувати 3-х кратне форсування, замість допустимого двократного.
Обмеження форсування здійснимо шляхом шунтування підсумовуючого вузла нелінійним елементом типу «обмеження», який реалізується у вигляді
двох зустрічно включених стабілітронів, напруга пробою яких вибирається на рівні:
 В.
(2.71)
В.
(2.71)
Виходячи з цього, вибираємо 2 стабілітрона серії КС189АВ з рівнем нечутливості 30 В.
2.4.8 Побудова структурної моделі
Модель замкнутої системи посхемі з загальним сумматором побудована в программному пакеті Mathlab наведено на рис 2.18
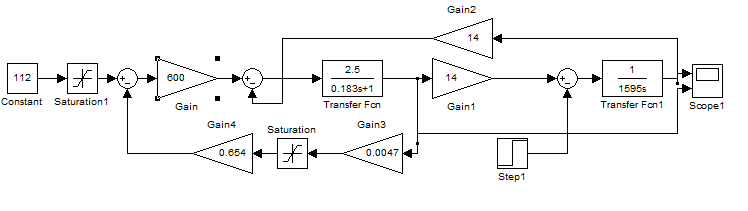
Рисунок 2.18- Структурна схема замкнутої системи з загальним суматором
2.4.9
Моделювання перехідних процесів в
замкнутій системі за схемою з загальним
суматором.Графіки
перехідних процесів струму та швидкості
при сталих значеннях
В,
 наведено на рис.2.19.
наведено на рис.2.19.
Рисунок 2.19 - Перехідні процеси , в замкненій системі з загальним суматором