

Розділ 2
 АНАЛІЗ
СИСТЕМИ ЕЛЕКТРОПРИВОДА ТЕХНОЛОГІЧНОГО
МЕХАНІЗМУ
АНАЛІЗ
СИСТЕМИ ЕЛЕКТРОПРИВОДА ТЕХНОЛОГІЧНОГО
МЕХАНІЗМУ
2.1 Обґрунтування і вибір системи керування електроприводом
Порівняємо такі системи електровприводу як АВК, ПЧ-АД, ТП-Д.
Частотно-регульований асинхронний електропривод (ПЧ-АД)[3].
Основні переваги:
- плавність регулювання і висока жорсткості механічних характеристик, що дозволяє регулювати швидкість в широкому діапазоні;
- двигун працює з невеликими величинами абсолютного ковзання, і втрати в двигуні не перевищують номінальних.
Основні недоліки:
- висока вартість (особливо для приводів великої потужності) перетворювачів частоти;
- складність реалізації більшості схем.
Асинхронно-вентильний каскад (АВК)[4].
Основні переваги:
- високий ККД при знижених обертах;
- так як відсутня необхідність глибокого регулювання швидкості трансформатор та інвертор мають потужність в 2 рази меншу ніж потужність асинхронного двигуна, що зменшує вартість електроприводу;
- плавне регулювання швидкості і моменту,не вимагає великої кількості силової контактної апаратури.
Основні недоліки:
- перевантажувальна здатність асинхронного двигуна у схемі каскаду знижується на 17 % ;
- висока вартість і складність апаратури перетворювачів та додаткові втрати в них.
Тиристорний перетворювач-двигун (ТП-Д)[3].
Основні переваги:
- висока швидкодія (зберігається в широкому діапазоні значень потужності електроприводу) та точність керування;
- дозволяє використовувати малопотужні керуючі пристрої, простіше реалізувати складні закони керування.
Основні недоліки:
- мала перевантажувальна здатність та чутливість до механічних коливань;
- обмежений темп наростання струму і напруги;
- накопичення погіршення стану структури переходу при повторних перевантаженнях певної тривалості.
З урахуванням всіх переваг і недоліків вибираємо електропривод виконаний по схемі асинхронно-вентильного каскаду(АВК).
2.2 Функціональна схема електроприводу по системі авк

Рисунок 2.1-Функціональна схема асинхронно-вентильного каскаду (АВК)
Електропривод по системі АВК включає наступне електромеханічне обладнання:
ТГ - тахогенератор;ШДУ - станція управління;СУ - система управління агрегатом ; К1 і К2 - контактори станції керування;Т - трансформатор; В-випрямляч; І - інвертор; ДТ1 і ДТ2 - датчики струму.
2.3 Дослідження статичних режимів роботи електроприводу
2.3.1.Складання схеми заміщення електропривода і розрахунок необхідних параметрів

Рисунок 2.2 Схема заміщення електроприводу
Еквівалентний опір схеми заміщення [5]:
 (2.1)
(2.1)
Складові
еквівалентного пору :
 - індуктивний опір трансформатора;
- індуктивний опір трансформатора; -
активний опір фази ротора;
-
активний опір фази ротора; -
активний опір статора приведений до
ротора;
-
активний опір статора приведений до
ротора; -
активний опір згладжую чого дроселя;
-
активний опір згладжую чого дроселя; -
активний опір трансформатора.
-
активний опір трансформатора.
Номінальний струм статора:
 (2.2)
(2.2)
Коефіцієнт приведення опорів:
 (2.3)
(2.3)
Параметри
схеми заміщення AД
у відносних одиницях(в.о.):
-
активний
опір
обмотки статора
-
реактивний
опір
обмотки статора
-
активний
опір
обмотки ротора
-
реактивний
опір
обмотки ротора
-
опір
намагнічування
 (2.4)
(2.4) (2.5)
(2.5) (2.6)
(2.6) (2.7)
(2.7)
 (2.8)
(2.8)
Коефіцієнт трансформації АД:
 (2.9)
(2.9)
Визначаємо опори:
 (2.10)
(2.10)
 (2.11)
(2.11)
 (2.12)
(2.12)
 (2.13)
(2.13)
 (2.14)
(2.14)
 (2.15)
(2.15)
 (2.16)
(2.16)
Індуктивний опір фази АД приведені до ротора:
 (2.17)
(2.17)
 (2.18)
(2.18)
2.3.2.Побудова швидкісної характеристики двигуна
ЕРС
холостого ходу інвертора при β=0 :
ЕРС
холостого ходу ротора при S=1:
 (2.19)
(2.19) (2.21)
(2.21) :
:
 (2.22)
(2.22)
Еквівалентний
опір,
приведений до роторного колапри :
:
 (2.23)
(2.23)
Струм у роторному колі:
 (2.24)
(2.24)
Природна
швидкісна характеристика зміні значення
 зображена
на рис2.3.
зображена
на рис2.3.
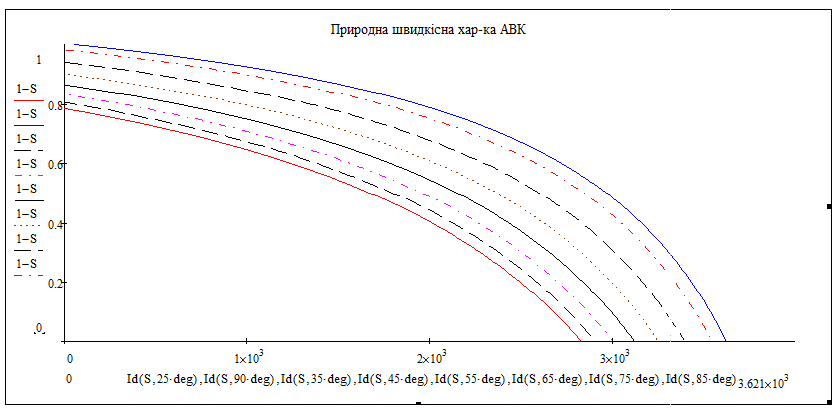
Рисунок 2.3 Швидкісна характеристика АВК
2.3.3 Побудова механічної характеристики електроприводу
Критичне ковзання(як функція від додаткового опору):
 (2.25)
(2.25)
Критичний момент:
 (2.26)
(2.26)
Приймаємо
статичний момент рівним номінальному
моменту двигуна

Ковзання холостого ходу АВК (де β- кут керування інвертора):
 (2.27)
(2.27)
Еквівалентний опір холостого ходу, приведений до роторного кола:
 (2.28)
(2.28)
Вираження для моменту АВК:
 (2.29)
(2.29)
Визначення кутів керування інвертора:
 (2.30)
(2.30)
 (2.31)
(2.31)
Для
номінально
їшвидкості
роботи
ВМ :

Режим
роботи
під
навантаженням
ВМ :
 ,
,
Граничні
кути
керування
інвертора ,
,
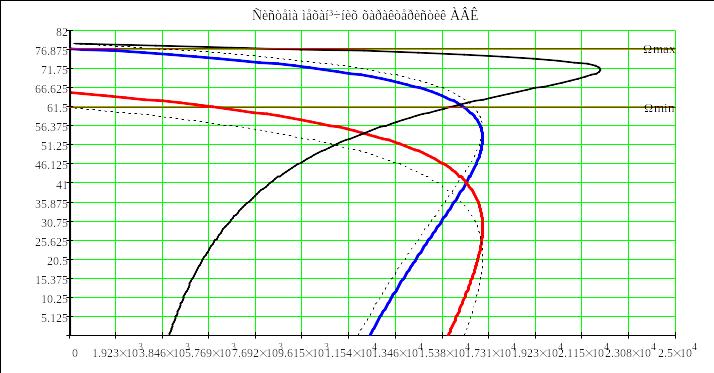
Рисунок
2.4 Система механічних характеристик
АВК при зміні кута керування

Для побудови графіка в залежності від швидкості необхідна формула:
 (2.32)
(2.32)

2.3.4 Енергетичні характеристики
В АВК ККД визначається за формулою:
 (2.33)
(2.33)
 -
номінальний
момент двигуна;
-
номінальний
момент двигуна; -
змінні
втрати у системі.
-
змінні
втрати у системі.
Визначаємо коефіцієнти :
 (2.34)
(2.34)
 (2.35)
(2.35) (2.36)
(2.36)
 (2.37)
(2.37)
Графік залежності ККД електроприводу від кутової швидкості по системі АВК має наступний вигляд рис2.6.

Рисунок 2.6- Залежність ККД системи АВК від кутової швидкості
2.3.5.Розрахунок коефіцієнта потужності
Визначається за формулою:
 (2.38)
(2.38)
Активна потужність двигуна :
 (2.39)
(2.39)
 (2.40)
(2.40)
 (2.41)
(2.41)
Активна потужність трансформатора:
№ докум.
 (2.42)
(2.42)
Коефіцієнт потужності двигуна:
 (2.43)
(2.43)
Реактивна потужність трансформатора:
 (2.44)
(2.44)
Номінальний
випрямлений струм ротора: ,
,
Індуктивний
опір обмотки ротора
Реактивна потужність двигуна:
 (2.45)
(2.45)
Коефіцієнт
враховуючий викривлення форми кривих
первинного струму двигуна і трансформатора
Отже,маємо:
 (2.46)
(2.46)
Графік
залежності
 зображено
на рис. 2.7.
зображено
на рис. 2.7.
Рисунок 2.7- Залежність коефіцієнту потужності від кутової швидкості