

Асинхронный двигатель.
Устройство и принцип действия.
В статоре 3 обмотки расположены так, что угол между осями 120о. На обмотки подаётся трёхфазное ЭДС со сдвигом фаз 120о. Благодаря этому фактору создаётся вращающееся магнитное поле. В это поле помещается ротор (короткозамкнутый или фазный). При пересечении вращающимся магнитным полем проводников ротора в проводниках наводится ЭДС и возникает ток. При взаимодействии Магнитного Поля с проводами с токомвозникает электромагнитный вращающий момент.
Пусть: n1 – скорость вращения магнитного поля
n2 – скорость вращения ротора.
![]() - условие вращения ротора.
- условие вращения ротора.
Скольжение – оптимальное отставание ротора от Магнитного Поля статора.
![]() Либо выражают в процентах
Либо выражают в процентах
![]()
S = 1 в момент запуска.
Скорость вращения Магнитного поля
статора:
![]() где f1 – частота тока;
где f1 – частота тока;
p – число пар полюсов.
При стандартной частоте f1 = 50Гц
P |
1 |
2 |
3 |
4 |
5 |
6 |
n1, об/мин |
3000 |
1500 |
1000 |
750 |
600 |
500 |
Регулирование скорости можно только изменяя частоту подключив частотный преобразователь, т.к. максимальная скорость при 50Гц может быть только 3000 об/мин.
П ары
полюсов (по катушкам).
ары
полюсов (по катушкам).
По физическим процессам Асинхронные Двигатели аналогичны трансформаторам.
Частота тока в роторе намного меньше чем в статоре (в статоре 50 Гц, а в роторе 1-2 Гц).
Потери и КПД в АД.
Пусть к АД подводится электрическая
мощность
![]() , часть этой мощности теряется в статоре
, часть этой мощности теряется в статоре
![]() .
.
![]() - электромагнитная мощность. Передаётся
через вращающееся Магнитное поле ротору.
В роторе возникают следующие потери:
- электромагнитная мощность. Передаётся
через вращающееся Магнитное поле ротору.
В роторе возникают следующие потери:

![]()
![]()
Механическая характеристика АД.
О на
выражает при М(S) Но
применяют:
на
выражает при М(S) Но
применяют:
(оа) – (S0-а) линейная часть характеристики которая является рабочей.
(ab) – нелинейная часть характеристики
(bc) – часть характеристики которая приходится при запуске.
Электромагнитный момент зависит от
подаваемого напряжения
![]() ,
и от сопротивления роторной цепи.
,
и от сопротивления роторной цепи.
Сопротивление можно менять только у фазного двигателя.
Влияние (зависимость) изменения напряжения (U1) на механическую характеристику АД.

![]()
П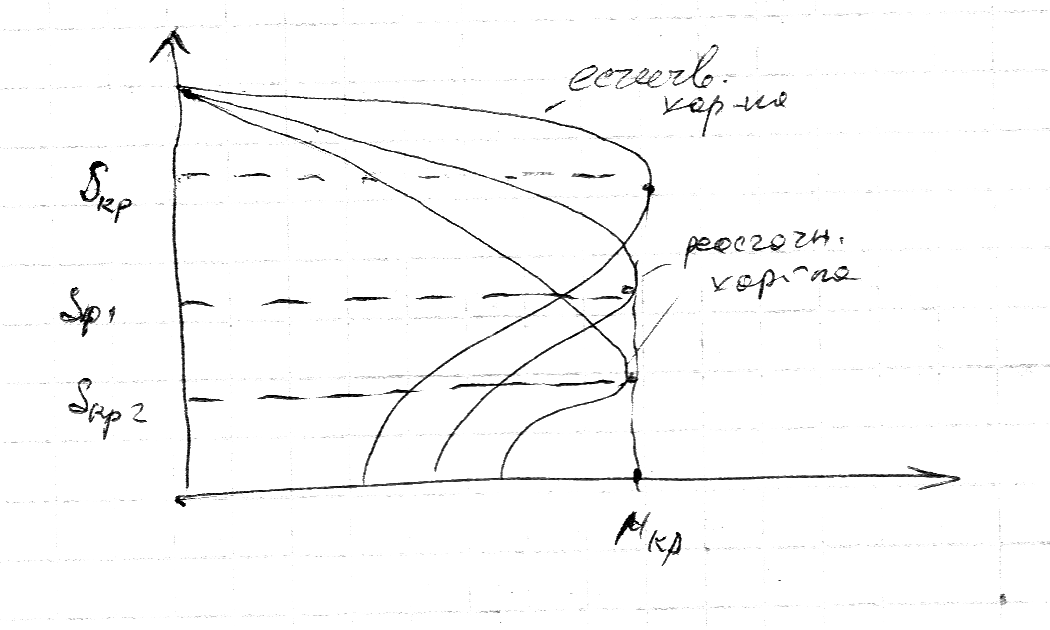 ри
понижении (U1)
уменьшается момент и существует опасность
того, что максимальный момент может
стать меньше номинального статического.
Что приведёт к остановке двигателя.
Поэтому, ПУЭ устанавливает предел
колебаний напряжения в сети (-5%), т.е.
падение напряжения на 5%.
ри
понижении (U1)
уменьшается момент и существует опасность
того, что максимальный момент может
стать меньше номинального статического.
Что приведёт к остановке двигателя.
Поэтому, ПУЭ устанавливает предел
колебаний напряжения в сети (-5%), т.е.
падение напряжения на 5%.
Реверс ад, снижение пускового тока.
Для реверса АД необходимо изменить направление вращения поля статора, что достигается сменой последовательности любых двух фаз.
При пуске АД его пусковой ток в 5-8 раз
больше номинального
![]()
Кратность пускового тока:
![]()
Большой пусковой ток для АД неопасен, т.к. он длится 0,5 секунд. Однако, бросок пускового тока при ограниченной мощности сети приводит к посадке напряжения в сети.
Для запуска мощных АД
![]() следует ограничивать пусковой ток для
того, чтобы снизить посадку напряжения
в сети. Для этого применяют
автотрансформаторы, реакторы, резисторы.
В некоторых случаях у АД обмотки статора
которых соединены треугольником в
нормальном режиме на время запуска
пересоединяют в звезду, что позволяет
снизить фазное напряжение в
следует ограничивать пусковой ток для
того, чтобы снизить посадку напряжения
в сети. Для этого применяют
автотрансформаторы, реакторы, резисторы.
В некоторых случаях у АД обмотки статора
которых соединены треугольником в
нормальном режиме на время запуска
пересоединяют в звезду, что позволяет
снизить фазное напряжение в
![]() раз,
а пусковой ток в 3 раза.
раз,
а пусковой ток в 3 раза.
Регулирование скорости вращения АД.
- Скорость Магнитного поля в статоре.
![]() - Скорость ротора АД.
- Скорость ротора АД.
Регулировать скорость вращения АД можно тремя способами:
1.Изменением частоты подаваемого напряжения;
2.Изменением числа пар полюсов;
3.Изменением скольжения.
Регулирование скорости вращения изменением скольжения.
Скольжение можно изменять 2-мя способами:
1.Изменением напряжения статора;
2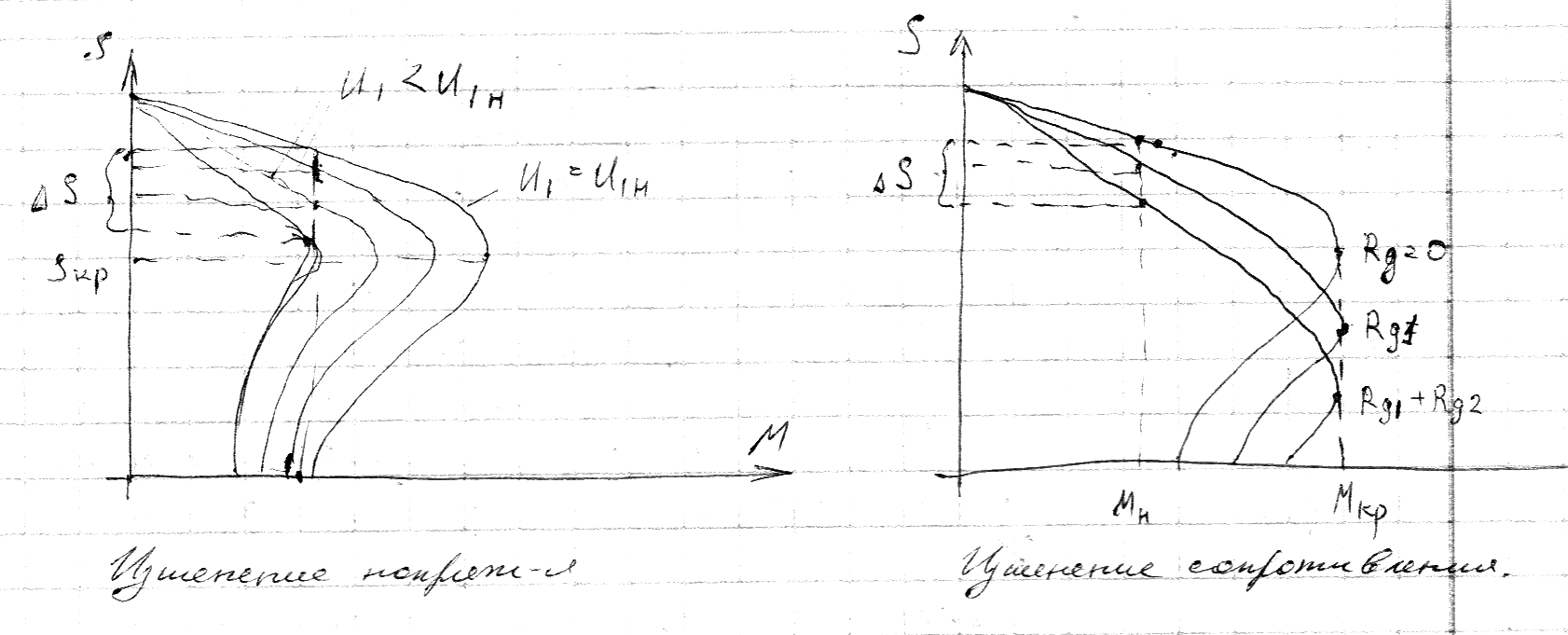 .Изменением
сопротивления роторной цепи.
.Изменением
сопротивления роторной цепи.
Изменеие скорости вращения ротора
изменением частоты питающего напряжения.
Чтобы регулировать (n2) данным способом необходимо каждый двигатель снабдить собственным источником питания с регулируемой частотой.
Из формулы:
![]() следует, что для того чтобы мощность
двигателя оставалась неизменной
необходимо параллельно с изменением
частоты менять подаваемое на статор
напряжение.
следует, что для того чтобы мощность
двигателя оставалась неизменной
необходимо параллельно с изменением
частоты менять подаваемое на статор
напряжение.
Промышленностью выпускаются теристорные преобразователи частоты.
Этот способ дорогой(по цене), но наиболее экономичный(по энергии) и удобный.
Регулирование скорости вращения ротора
изменением числа пар полюсов обмотки статора.
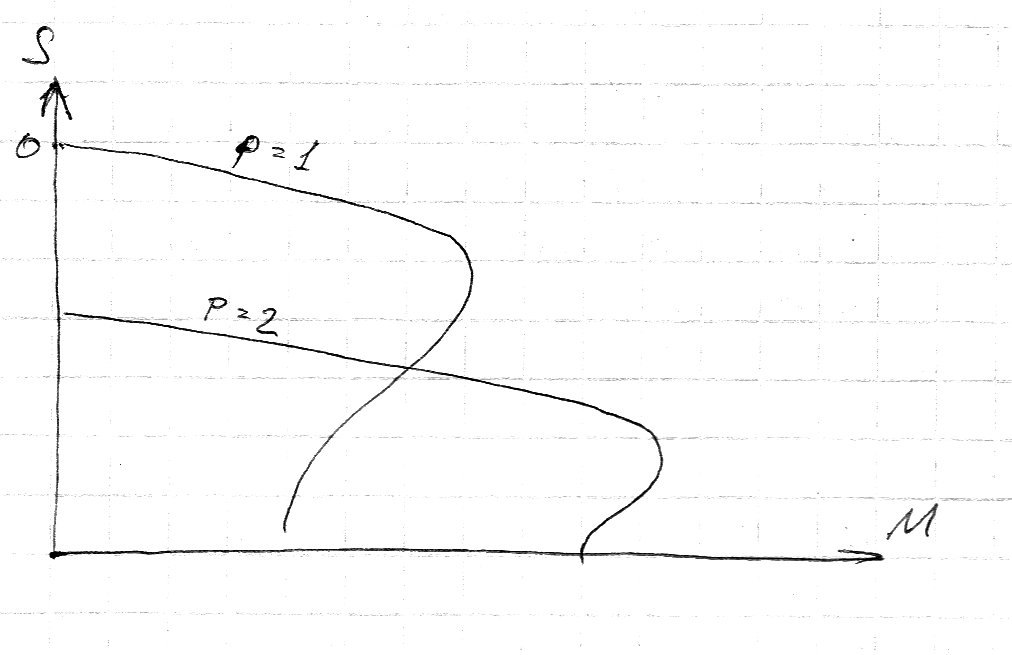
Для этого способа изготавливают АД у которых в пазы статора закладывают 2 независимые обмотки с разным числом пар полюсов или 1 обмотка, но с дополнительными выводами, позволяющими переключать число пар полюсов. Изготовляются двигатели 2-х, 3-х и 4-х скоростные. Этот способ регулирования экономичен, прост, но позволяет только ступенчатое изменение оборотов.
Тормозные режимы АД.