

3.Описание нелинейной сар температуры
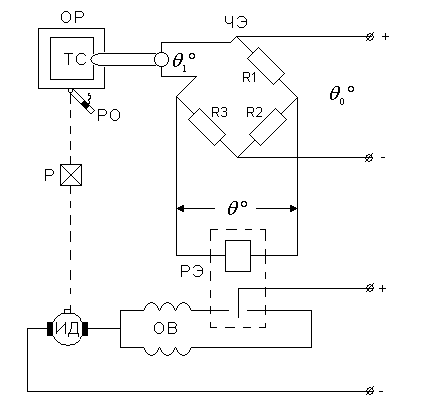
Рис.1 Принципиальная электрическая схема САР температуры
ОР – объект регулирования;
ЧЭ – чувствительный элемент (мост с термосопротивлением);
РЭ – релейный элемент;
ИД – исполнительный двигатель;
Р – редуктор;
РО – регулирующий орган (заслонка
Отклонение регулируемой величины измеряется с помощью термометра сопротивления включенного в мостовую схему ЧЭ. Напряжение с диагонали моста поступает на нелинейный элемент РЭ (балансный усилитель), который управляет двигателем ИД. Через редуктор Р двигатель приводит в движение регулирующий орган РО (заслонка). Регулирующий орган воздействует на объект регулирования ОР за счет изменения величины регулирующего воздействия.
ЧЭ состоит из моста. Плечи моста сбалансированы. При отклонении температуры объекта регулирования от заданной величины происходит изменение термосопротивления моста ЧЭ. Равновесие плеч моста нарушается, на входе релейного элемента появляется напряжение, прямо пропорциональное разности температур (θо - θi). Он коммутирует ОВ, которая в свою очередь приводит в движение ИД. Вал двигателя через редуктор перемещает заслонку, которая управляет температурой (печи) объекта регулирования (регулирует подачу топлива в печь). В итоге температура ОР возвращается к заданному значению.
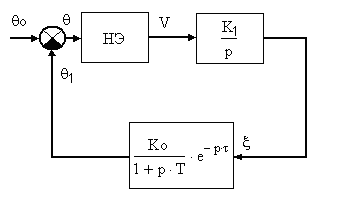
Рис.2 Структурная схема НСАР температуры
3.1.Задание на курсовое проектирование
Имеется нелинейная система автоматического регулирования температуры, принципиальная и структурная схема которой представлена выше.
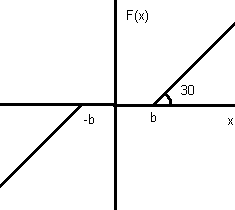
Нелинейный элемент представляет собой двухпозиционное реле с гистерезисом.
Характеристика
![]() определяет характеристику нелинейного
элемента в виде V=f(θ).
определяет характеристику нелинейного
элемента в виде V=f(θ).
Т0 = 5 [с] – постоянная времени;
t = 2 [с] – время запаздывания;
k1 = 0.1 [°C/C·B] – коэффициент передачи двигателя с редуктором;
k0 = 10 [°C/рад] – коэффициент передачи печи;
Параметры РЭ:
b = 10 [°C];
c = 20 [В];
Коэффициенты ГЛ:
![]()
![]()
![]()
(1)
Подставляя численные значения получим:
![]()
4.Составление дифференциального уравнения замкнутой нелинейной системы автоматического регулирования (знсау).
В автономной
системе
![]() =
0, тогда пусть
=
0, тогда пусть
![]() =
x,
=
x,![]() =y
,
=y
,
![]() =z
=z
![]()
![]()
Преобразуем исходную структурную схему к виду с одним нелинейным звеном и одним линейным звеном:
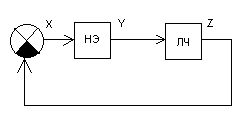
Тогда получим:
![]()

![]()
Условие замыкания системы: z = – x.
ДУ ЗНСАУ без учета запаздывания:

С учетом уравнений (1) и (2) получим ДУ для каждого участка:
I участок
II участок
III участок
5.Построение фазовых портретов нсау.
Для построения фазовых портретов воспользуемся методом припасовывания. Сущность этого метода заключается в том, что нелинейное уравнение системы разбивается на ряд линейных уравнений, соответствующих некоторым участкам движения системы. Полученные линейные уравнения решаются соответственно участкам статической нелинейности обычным или операционным методом. При этом конечные значения решения для предыдущего участка принимаются за начальные значения решений последующего участка.
I участок:
Уравнение имеет первый и второй интеграл соответственно в виде:
![]()

II участок:
Уравнение имеет первый и второй интеграл соответственно в виде:
![]()

III участок:
Уравнение (5) имеет первый и второй интеграл соответственно в виде:
![]()

Для исследования нелинейных систем широко используется метод фазового пространства, который состоит в следующем. Представим себе n – мерное пространство координат состояния системы (x1,x2, x3, …, xn), называемое фазовым пространством. Тогда начальное состояние x(t0) изобразится определенной точкой M0 с координатами x1(t0), x2(t0), …, xn(t0), а процесс во времени, т.е. решение ДУ, получит изображение кривой в виде некоторой кривой которая называется фазовой траекторией данной системы. Выбрав другую начальную точку получим другую фазовую траекторию. Совокупность всех возможных фазовых траекторий называют фазовым портретом системы.
В итоге мы получили уравнения фазовых траекторий для всех участков системы. Построим фазовый портрет с помощью математического пакета Maple. График фазового портрета с запаздыванием и без запаздывания приведены на рисунках:
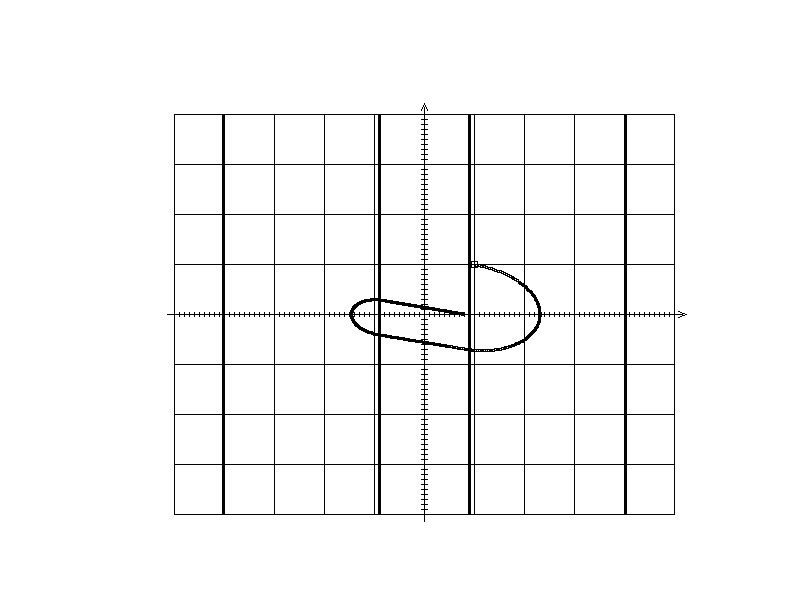
рис.1 ФП без запаздывания
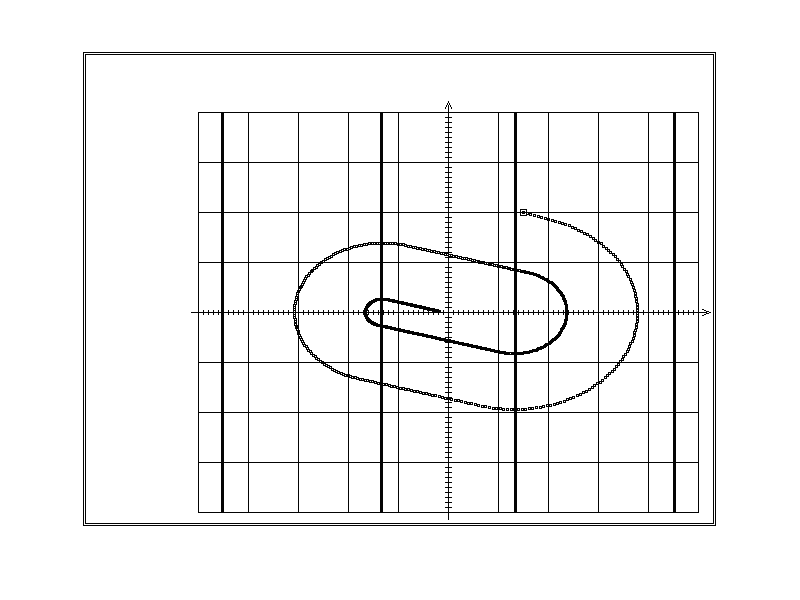
Рис.2 ФП с запаздыванием
Вывод:
Система без запаздывания устойчива, процесс затухает. Периодический режим отсутствует.
Построим графики переходных процессов для Θ(t). Так как x(t) = Θ(t) то воспользуемся уравнениями которые были выведены ранее для фазового портрета. Графики переходных процессов приведены на рис.
Для построения ξ(t) по структурной схеме сделаем преобразование:
![]() .
.
Переходя во временную область:
![]() ,
если при t = 0, ξ = 0, то С1
= 0.
,
если при t = 0, ξ = 0, то С1
= 0.
График переходного процесса приведен на рисунке:

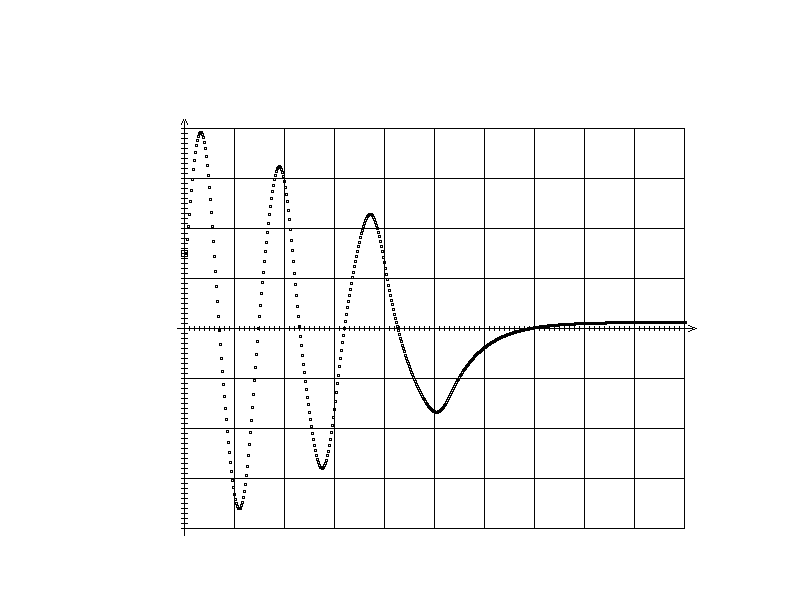
Переходный процесс с запаздыванием