

Лекція 5
Короткий зміст|вміст,утримання|: Приведення сили до заданого центру. Приведення системи сил до заданого центру. Умови рівноваги просторової системи паралельних сил. Умови рівноваги плоскої системи сил. Теорема про три моменти. Статично визначені і статично невизначені завдання|задачі|. Рівновага системи тіл.
Приведення системи сил до заданого центру. Приведення сили до заданого центру
Р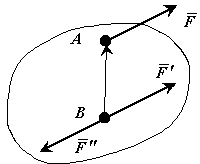 івнодіюча|рівнодійна|
системи сил, що сходяться, безпосередньо
знаходиться|перебуває|
за допомогою складання сил за правилом
паралелограма. Очевидно, що аналогічну
задачу можна буде вирішити і для
довільної системи сил, якщо знайти для
них метод, що дозволяє перенести всі
сили в одну точку|точку|.
івнодіюча|рівнодійна|
системи сил, що сходяться, безпосередньо
знаходиться|перебуває|
за допомогою складання сил за правилом
паралелограма. Очевидно, що аналогічну
задачу можна буде вирішити і для
довільної системи сил, якщо знайти для
них метод, що дозволяє перенести всі
сили в одну точку|точку|.
Рисунок 5-1
Теорема про паралельне перенесення|перенос| сили. Силу, прикладену до абсолютно твердого тіла, можна, не змінюючи|зраджувати| дії, що надається|робить,виявляє,чинить| нею, переносити з|із| даної точки|точки| в будь-яку іншу точку тіла, додаючи при цьому пару з|із| моментом, який дорівнює моменту сили, що переноситься відносно|відносно| точки|точки|, куди сила переноситься.
Хай|нехай|
сила
прикладена в точці A. Дія цієї сили не
змінюється, якщо в точці B прикласти дві
врівноважені сили. Отримана|одержувати|
система трьох сил є силою
![]() ,
яка дорівнює
,
але|та|
прикладену в точці|точці|
В і пару
,
яка дорівнює
,
але|та|
прикладену в точці|точці|
В і пару
![]() з|із|
моментом
з|із|
моментом
![]() . Процес заміни сили
силою|силоміць|
і парою сил
називається
приведенням сили
до заданого центру В .
. Процес заміни сили
силою|силоміць|
і парою сил
називається
приведенням сили
до заданого центру В .
Приведення системи сил до заданого центру
Основна теорема статики (Пуансо)
Будь-яку довільну систему сил, що діє на тверде тіло, можна в загальному|спільному| випадку привести до сили і пари сил. Цей процес заміни системи сил однією силою і однією парою сил називається приведенням системи сил до заданого центру.
Головним вектором системи сил називається вектор, який дорівнює векторній сумі цих сил.
![]()
Головним моментом системи сил відносно|відносно| точки|точки| О тіла, називається вектор, який дорівнює векторній сумі моментів всіх сил системи відносно|відносно| цієї точки|точки|.
![]()
Формули для обчислення|підрахунку| головного вектора і головного моменту
![]()
![]()
![]()
![]()
![]()
![]()
Формули для обчислення|підрахунку| модуля і направляючих|спрямовувати,скеровувати| косинусів головного вектора і головного моменту
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Умови рівноваги системи сил
Векторна форма
Для рівноваги довільної системи сил, прикладених до твердого тіла, необхідно і достатньо|досить|, щоб|аби| головний вектор системи сил дорівнював нулю і головний момент системи сил відносно|відносно| будь-якого центру приведення також дорівнював нулю.
![]()
![]()
Алгебраїчна форма
Для рівноваги довільної системи сил, прикладених до твердого тіла, необхідно і достатньо|досить|, щоб|аби| три суми проекцій всіх сил на осі декартових координат дорівнювали нулю і три суми моментів всіх сил відносно трьох осей координат також дорівнювали нулю.
![]()
![]()
![]()
![]()
![]()
![]()
Умови рівноваги просторової системи паралельних сил
На тіло діє система паралельних сил. Розташуємо вісь Oz| паралельно силам.
Рівняння
![]()
![]()
![]()
Для рівноваги просторової системи паралельних сил, що діють на тверде тіло, необхідно і достатньо|досить|, щоб|аби| сума проекцій цих сил дорівнювала нулю і суми моментів цих сил відносно двох координатних осей, перпендикулярним силам, також дорівнювали нулю.
![]() -
проекція
сили на вісь Oz|.
-
проекція
сили на вісь Oz|.