

Рівномірний рух
При рівномірному русі точки|точки| по траєкторії будь-якої форми модуль швидкості v = const|, отже постійна і алгебраїчна швидкість vτ|, яка може відрізнятися від v тільки|лише| знаком.
Оскільки
![]() |тому
що|, то
|тому
що|, то
![]() .
Якщо прийняти при
.
Якщо прийняти при
![]()
![]() ,
то після|потім|
інтеграції отримаємо|одержуватимемо|
,
то після|потім|
інтеграції отримаємо|одержуватимемо|
 або
або
![]()
Можна
також записати ![]()
![]()
Рух який рівномірно змінюється
Рухом який рівномірно змінюється називається такий рух точки|точки| по траєкторії будь-якої форми, при якому дотичне прискорення постійне, тобто aτ| = const. Рух називається рівноприскореним, якщо алгебраїчна швидкість vτ| і дотичне прискорення aτ| мають однакові знаки. Якщо vτ| і aτ| мають різні знаки, то називається| рівносповільненим| . Отримаємо|одержуватимемо| формули для алгебраїчної швидкості і відстані при русі який рівномірно змінюється .
Маємо:
![]() ,
,
![]() .
.
Якщо
прийняти при
![]() ,
то після|потім|
інтеграції отримаємо|одержуватимемо|
,
то після|потім|
інтеграції отримаємо|одержуватимемо|
 або
або
![]() .
.
Можна
також записати ![]()
![]()
Далі
![]() і після|потім|
інтеграції
і після|потім|
інтеграції

або
![]() .
.
Можна
також записати ![]()
![]()
Якщо
вирішити|рішати,розв'язати|
квадратне рівняння, то можна знайти
![]() .
.
Лекція 3
Короткий зміст|вміст,утримання|: Швидкість і прискорення точки|точки| в полярних координатах.
Розглянемо|розглядуватимемо| рух точки|точки| в площині|плоскості|. В цьому випадку рух можна задати в полярних координатах. Для цього приймемо будь-яку точку|точку| О площини|плоскість| за полюс і проведемо з|із| неї полярну вісь, наприклад вісь Oх|. Положення|становище| рухомої точки М на площині|плоскості| відоме, якщо задані радіус r і полярний кут|ріг,куток| як функції часу, тобто
![]() і
і
![]() (3-1)
(3-1)
Ці
рівняння називаються рівняннями
руху точки|точки|
в полярних координатах.
Якщо з|із|
рівнянь (3-1) виключити параметр - час
(t),
то отримаємо|одержуватимемо|
рівняння траєкторії в полярних
координатах:
![]() .
.
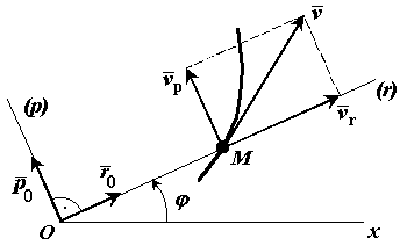 Введемо|запроваджуватимемо|
одиничний|поодинокий|
вектор
Введемо|запроваджуватимемо|
одиничний|поодинокий|
вектор
![]() ,
направлений|спрямований|
по радіус-вектору від полюса О
до точки М.
Тоді
,
направлений|спрямований|
по радіус-вектору від полюса О
до точки М.
Тоді
![]() .
.
Для
швидкості
![]() отримуємо|одержуємо|
вираз|вираження|
отримуємо|одержуємо|
вираз|вираження|
![]() .
Похідна від
одиничного|поодинокого|
вектора за часом дорівнює
.
Похідна від
одиничного|поодинокого|
вектора за часом дорівнює
![]() (без
доказу)
(без
доказу)
Рисунок 3-1
де
![]() - одиничний|поодинокий|
вектор, напрям|направлення|
якого виходить поворотом вектора
- одиничний|поодинокий|
вектор, напрям|направлення|
якого виходить поворотом вектора
![]() на 90о
в позитивному напрямі|направленні|
кута|рогу,кутка|
.
на 90о
в позитивному напрямі|направленні|
кута|рогу,кутка|
.
Після|потім|
цього для швидкості
отримуємо|одержуємо|
вираз|вираження|
![]() .
.
Це
розкладання швидкості точки|точки|
на радіальну
![]() і трансверсальну (поперечну)
і трансверсальну (поперечну)
![]() складові, тобто
складові, тобто
![]() ;
; ![]() ;
; ![]() ,
,
де
![]() - радіальна швидкість;
- радіальна швидкість;
![]() - трансверсальна
швидкість.
- трансверсальна
швидкість.
Модуль
швидкості дорівнює
![]() .
.
Визначимо
прискорення точки|точки| ![]() .
.
Після|потім|
диференціювання отримуємо
![]() |одержуємо|..
|одержуємо|..
Розкладемо
прискорення точки|точки|
на радіальну
![]() і трансверсальну (поперечну)
і трансверсальну (поперечну)
![]() складові, тобто
складові, тобто
![]()
![]()
![]()
де
![]() - радіальна швидкість;
- радіальна швидкість;
![]() - трансверсальна
швидкість.
- трансверсальна
швидкість.
Модуль
прискорення дорівнює
![]() .
.