

3.4 Анализ машинной модели двухконтурной сар свгт с ку
Анализ машинной модели двухконтурной САР СВГТ будем осуществлять по переходной характеристике, ЛАЧХ и ЛФЧХ системы.
Для этого введем в MATLABпередаточную функцию КУ:
WKYchisl_l=[100 1];
WKYchisl_2=[10 1];
WKYchisl_3=[0.4 1];
WKYchisl_4=[0.1 1];
WKYchisl=conv(WKYchisl_l,WKYchisl_2);
WKYchisl=conv(WKYchisl,WKYchisl_3);
WKYchisl=conv(WKYchisl,WKYchisl_4);
WKYchisl=conv(WKYchisl,WKYchisl_4);
WKYchisl=conv(WKYchisl,0.02);
WKYznam_l=[0.00 0001 1];
WKYznam=conv(WKYznam_l,WKYznam_l);
WKYznam=conv (WKYznam, WKYznam_l) ; WKYznam=conv(WKYznam,WKYznam_l); WKYznam=conv(WKYznam,WKYznam_l);
WKYsys=tf(WKYchisl, WKYznam);
Найдём передаточную функцию системы с КУ:
Wsys2=Wsys*WKYsys;
Wsуs_new2 = feedback(Wsys2 , 1) ;
Найдем переходную характеристику замкнутой системы, используя команду Step( Wsys_new2):
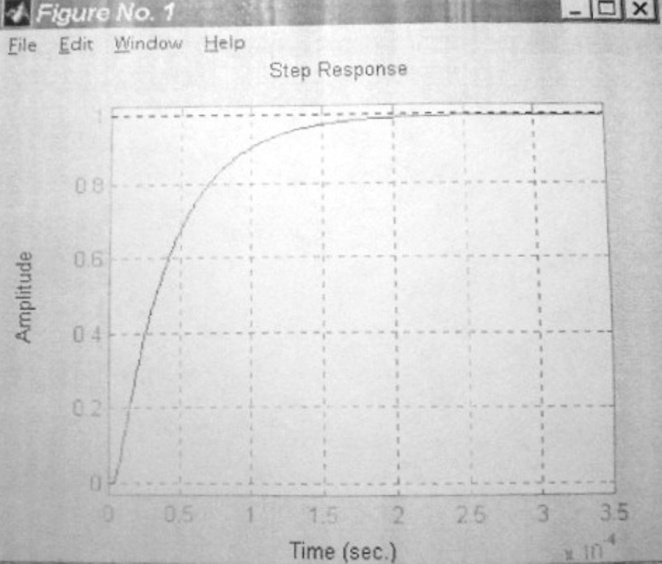
Рисунок 2.24 - Переходная характеристика скорректированной системы
Найдём ЛАЧХ и ЛФЧХ разомкнутой системы, используя команду Маrgin(Wsys 2):
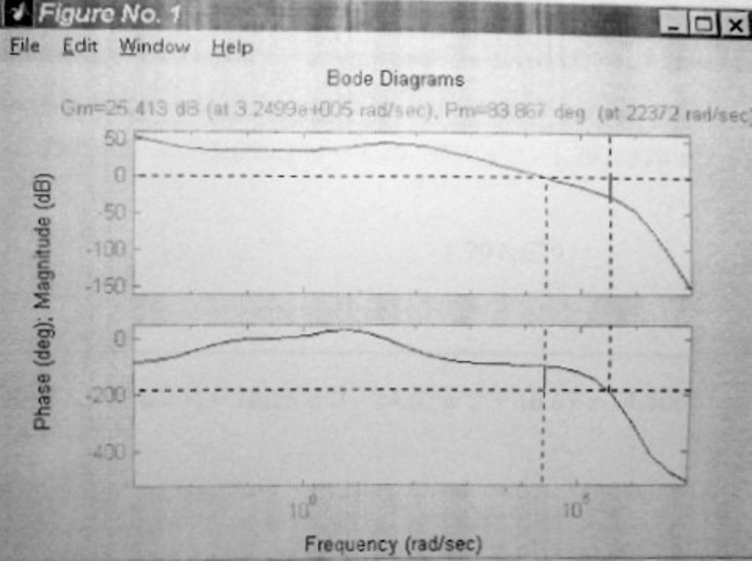
Рисунок 2.25 - ЛАЧХ и ЛФЧХ разомкнутой системы
По полученной переходной характеристике, ЛАЧХ и ЛФЧХ оцениваем показатели качества управления системы:
1)
время переходного процесса системы –
2,5 5с;
5с;
2) статическая ошибка системы - 0 %;
3) перерегулирование системы - 0%;
4) запас устойчивости системы по фазе - не менее 83.867°;
5) запас устойчивости системы по амплитуде - 25.413 дБ.
Таким образом, за счет использования КУ получены значения показателей качества управления системы, удовлетворяющие требованию технического задания.
3.5 Синтез цифрового ку двухконтурной сар свгт
Для того чтобы преобразовать непрерывное корректирующее устройство к цифровому виду необходимо применить команду c2d.
WKYdig=c2d(WKYsys,0.0 00001,'prewarp',5000000)
Период
дискретизации выбираем равным 0.000001
поскольку система имеет очень малое
время переходного процесса (порядка
 ).
'prewarp'
- название метода, с помощью которого
осуществляется преобразование КУ к
цифровому виду, 5000000 - частота метода,
имеет такое большое значение тоже по
причине малого времени переходного
процесса у непрерывной системы.
).
'prewarp'
- название метода, с помощью которого
осуществляется преобразование КУ к
цифровому виду, 5000000 - частота метода,
имеет такое большое значение тоже по
причине малого времени переходного
процесса у непрерывной системы.
Применив функцию с2d, получаем дискретную функцию КУ:
1.797е029 z^5 - 8.983е029 z^4 + 1.797е030z^3 - 1.797е030z^2 + 8.983е029 z
- 1.797е029
------------------------------------------------------------------------------------------------z^5 - 6.756z^4 + 18.26z^3 - 24.67 z^2 + 16.67 z - 4.506
Sampling time: le-006
Строим машинную модель исследуемой двухконтурной САР СВГТ с цифровым КУ в Simulink и проводим её исследование. При этом для реализации цифрового КУ используем блок Discrete Transfer Fen в библиотеке дискретных элементов (рис. 2.26), который аналогичен блоку Transfer Fen для непрерывных систем.
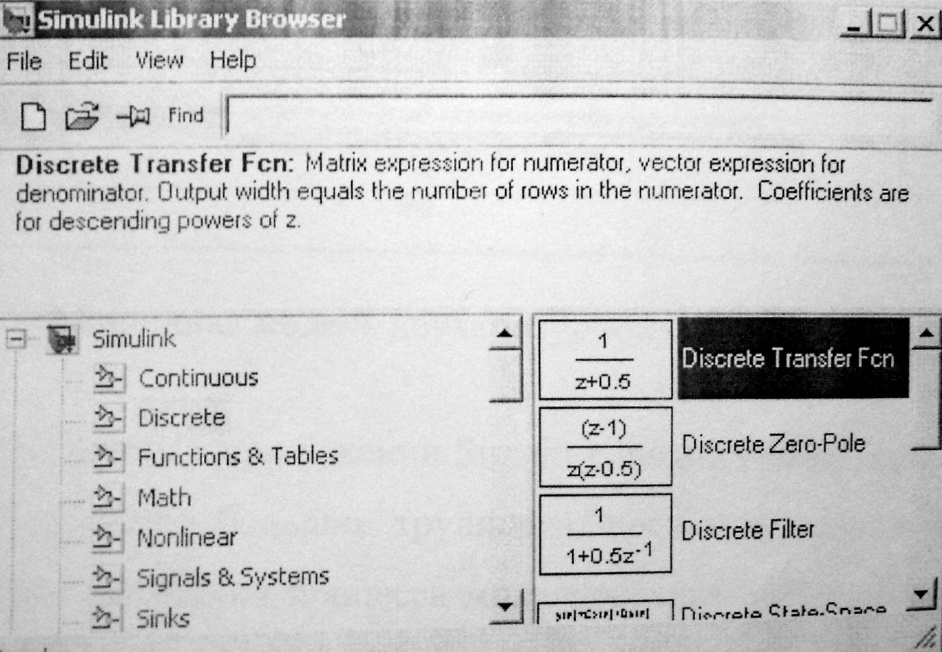
Рисунок 2.26 - Discrete Transfer Fen в библиотеке Simulink
Значения параметров блока задаются аналогично, как и для блока Transfer Fen (рис. 2.27).
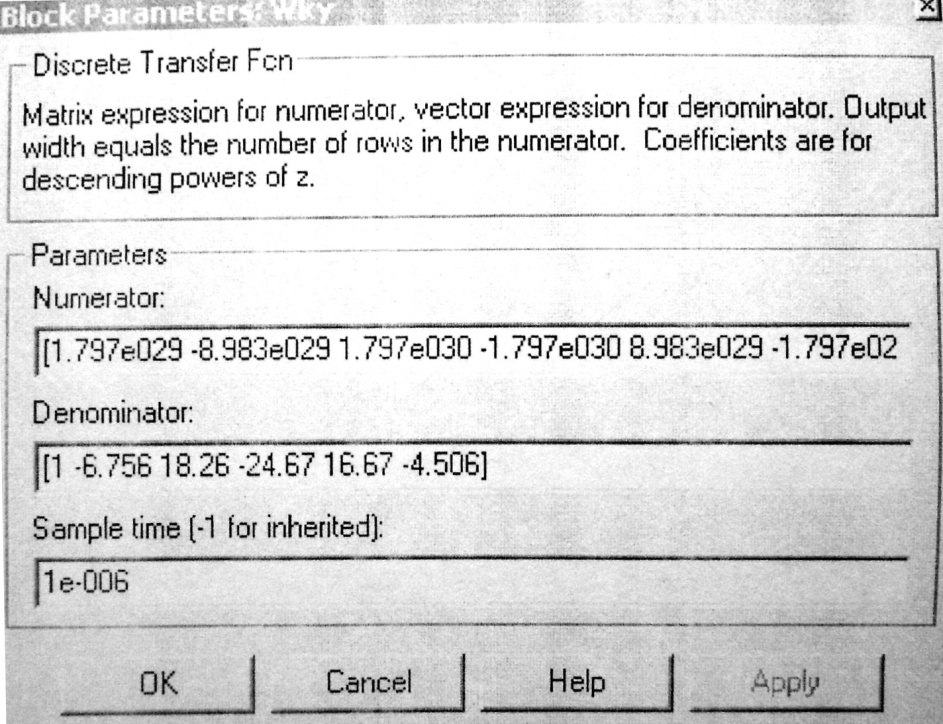
Рисунок 2.27 - Окно параметров блока Discrete Transfer Fen
На рисунке 2.28 представлена машинная модель двухконтурной САР СВГТ с цифровым КУ, построенная в приложении Simulink пакета МаtLab.
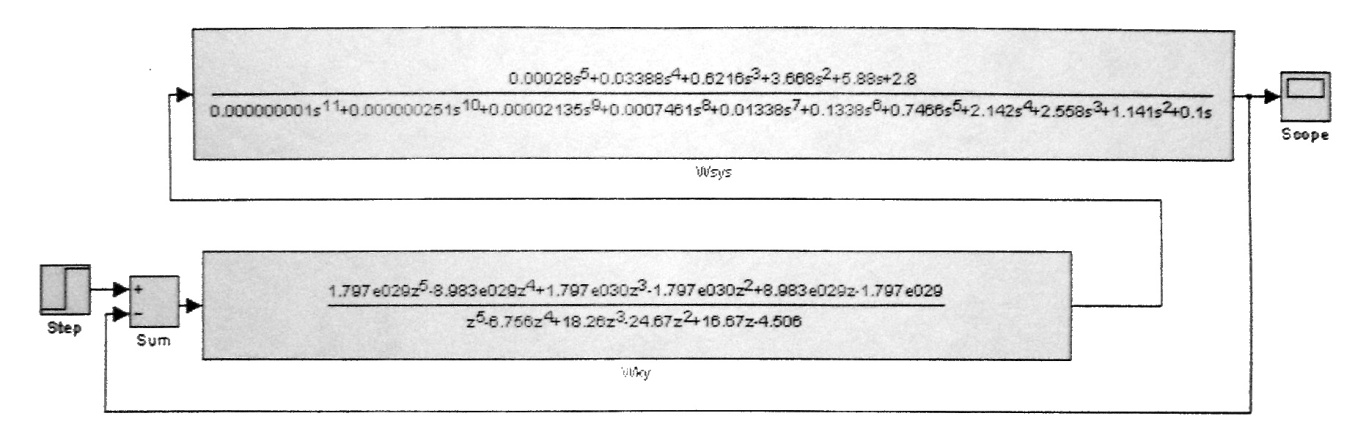
Рисунок 2.28 - Машинная модель двухконтурной САР СВГТ с цифровым КУ
При моделировании в приложении Simulink пакета МatLab системы такого высокого порядка возникают большие трудности, поскольку для её моделирование нужно в параметрах настройки процесса моделирования выбрать соответствующее малое время моделирования и соответствующий метод моделирования. И даже это не гарантирует, что процесс моделирования окажется корректным, поскольку многое зависит от так называемого машинного шага, а он в свою очередь зависит от возможностей процессора.
Выводы: в ходе выполнения лабораторной работы была получена и исследована двухконтурная система автоматического регулирования скорости вращения гидротурбины. Осуществлен анализ исходной системы, показатели качества управления которой следующие:
1) время переходного процесса системы - более 7с;
2) статическая ошибка системы - более 5%;
3) перерегулирование системы - более 10%;;
4) запас устойчивости системы по фазе - 0°;
5) запас устойчивости системы по амплитуде - 0 Дб.
Полученные показатели качества управления не удовлетворяют требованиям технического задания.
Для повышения качества управления осуществлен синтез КУ системы, обеспечивающий требуемые показатели качества управления:
1) время переходного процесса системы – 2,5· 5с;
2) статическая ошибка системы - 0 %;
3) перерегулирование системы - 0%;
4) запас устойчивости системы по фазе - не менее 83.867°;
5) запас устойчивости системы по амплитуде - 25.413 дБ.
На основании синтезированного непрерывного КУ, используя инструментальные средства и команды пакета МathLab, осуществлен синтез цифрового КУ.
Контрольные вопросы для сдачи лабораторной работы
1. Для чего в рассматриваемой САР СВГТ используется второй контур управления, какие звенья входят в его состав? Каково их назначение?
2. Каким образом в данной лабораторной работе осуществлен анализ показателей качества управления? Какие еще существуют показатели качества управления?
3. Является ли рассматриваемая САР СВГТ астатической и как определяется порядок астатизма системы?
4. Объясните алгоритм построения КУ.
5. Что такое обобщенная номограмма Солодовникова для астатических систем первого порядка и как определяется по ней частота среза?
6. Расскажите правила переноса узла через звено по ходу и против хода сигнала.
7. Объясните принцип нахождения передаточных функций системы по ЛАЧХ системы.
8. Объясните, как программно построить ЛАЧХ системы в МАТЬАВ, и с помощью какой команды можно построить ЛАЧХ и ЛФЧХ системы.
9. Как определяется период дискретизации системы?
10. С помощью, какой команды можно построить дискретную модель элемента системы и что означают составляющие этой команды.