

3.2 Анализ машинной модели двухконтурной сар свгт
Анализ машинной модели двухконтурной САР СВГТ будем осуществлять по переходной характеристике, ЛАЧХ и ЛФЧХ системы.
Построение переходной характеристики осуществляем в приложении LTI Viewer в Sirnulink. Для этого необходимо выбрать на панели меню Sirnulink: Tools\ Linear analysis (рис.2.13), после чего появятся окна: Model_Inputs_and_Outputs (рис.2.14), из которого берутся входные и выходные блоки системы, и LTI Viewer (рис.2.15).

Рисунок 2.13 - Окно вызова процедуры Linear analysis

Рисунок 2.14 - Окно модели входа и выхода
Рисунок 2.15 - Окно LTI Viewer
В окне LTI Viewer: untitled заходим в меню Simulink \Get Linearized Model, в котором получаем график переходного процесса машинной модели двухконтурной САРСВГТ (рис. 2.17).

Рисунок 2.17 - Переходная характеристика двух контурной САР СВГТ
Построение ЛАЧХ и ЛФЧХ системы будем осуществлять в этом же приложении. Для этого зайдем в подменю Plot Туре и поставим галочку возле Bode.

Рисунок 2.18- ЛАЧХ и ЛФЧХ двухконтурной САР СВГТ
В LTI Viewer можно так же построить АЧХ (Nyquist), график реакции системы на единичный импульс (Impulse), нули и полюсы (Pole/Zero) и другие характеристики системы. Кроме того, можно вывести на графике, выбрав меню Characteristics, время переходного процесса (Settling Time), время нарастания (Rise Time), установившуюся ошибку (Steady State), максимальное значение (Peak Response). А если щелкнуть левой кнопкой мыши на графике, то появится окошко с соответствующей информацией, в зависимости оттого, что выбрано в меню Characteristics.
По полученной переходной характеристике, ЛАЧХ и ЛФЧХ оцениваем показатели качества управления системы:
1) время переходного процесса системы - более 7с;
2) статическая ошибка системы - более 5%;
3) перерегулирование системы - более 10%;;
4) запас устойчивости системы по фазе - 0°;
5) запас устойчивости системы по амплитуде - 0 Дб.
Проанализировав полученные значения показателей качества управления, можно сказать, что исследуемая система не удовлетворяет требованиям технического задания.
Для того чтобы добиться требуемых показателей качества управления исследуемой системы, в контур управления необходимо ввести корректирующее устройство (КУ).
3.3 Синтез ку двухконтурной сар свгт
Синтез КУ будем осуществлять в среде пакета Matlab. Для этого произведем преобразование структурной схемы исследуемой системы (рис. 2.4). Преобразование будем осуществлять, используя команды пакета Matlab. Команды будем вводить в созданном m-файле. Для создания т-файла необходимо в основном окне пакета Matlab выбрать в меню File\New\M-file или нажать на кнопку New M-File (с изображением белого листа), в результате появится окно m-файла (рис. 2.19). Для того, что бы запустить команды на выполнение, необходимо в командном окне ввести имя m-файла, в котором набраны команды, и нажать Enter.
Рисунок 2.19 — Окно m-файла
Преобразование структурной схемы исследуемой системы:
1) Введем передаточные функции всех звеньев в созданный m-файл:














где
 -
передаточные функции соответствующих
блоков;
-
передаточные функции соответствующих
блоков;
 -
передаточные функции турбины
-
передаточные функции турбины
 -
передаточная функция программного
кулачка.
-
передаточная функция программного
кулачка.
2)
Найдем передаточную функцию замкнутого
контура, состоящего из звеньев


3)
Внесем
звено
 в
контур первой
обратной связи (это всё равно, что
перенести узел через звено по ходу
сигнала, а в этом случае добавляется
обратное звено) и найдём передаточную
функцию последовательного соединения
звеньев
в
контур первой
обратной связи (это всё равно, что
перенести узел через звено по ходу
сигнала, а в этом случае добавляется
обратное звено) и найдём передаточную
функцию последовательного соединения
звеньев


4) Находим суммарную передаточную функцию двух контуров обратной связи:

5) В результате преобразований получили следующую структурную схему:

Рисунок 2.20 - Преобразованная структурная схема исследуемой системы
6)
Преобразуем схему, разместив
 и
и
 в прямой цепи, при этом сигнал
в прямой цепи, при этом сигнал
 станет выходным:
станет выходным:
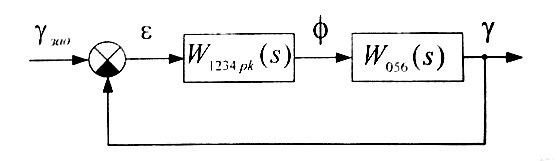
Рисунок 2.21 - Преобразованная структурная схема исследуемой системы с выходом
7) Найдём передаточную функцию последовательного соединения звеньев и :

8) Найдем передаточную функцию системы:
Wsуs_new=feedback(Wsys , 1) ;
Передаточная функция системы имеет следующий вид:
Transfer function:

9) Построим переходную характеристику системы, используя команду Step:
step(Wsys_new)
grid
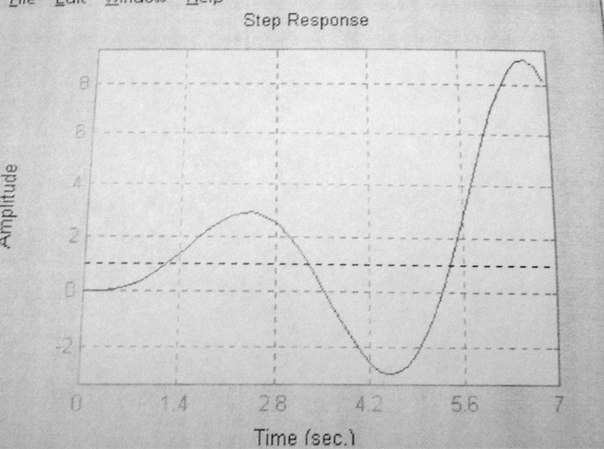
Рисунок 2.22 – Переходная характеристика системы
Как видно по переходной характеристики системы (рис. 2.22) - она не удовлетворяет требованиям технического задания.
На основании этого выбираем последовательное линейное непрерывное корректирующее устройство. Синтез корректирующего устройства осуществляем по методу В.В. Солодовникова.
1) Строим располагаемую ЛАЧХ по передаточной функции разомкнутой системы Wsys(s):
[Wsysnum,Wsysden]=tfData(Wsys, 'v') ;
wfl=linspace(-3,10); for i=l:100
wf(i)=10^wf1 (i);
end;
Wj=freqs(Wsysnum,Wsysden,wf);
A=abs(Wj);
B=20*logl0(A);
ЛАЧХ
строим для диапазона частот ( …
… ).
).
Описание команд:
[Wsysnum, Wsysden] =tfData (Wsys, ' v') ; — позволяет получить коэффициенты числителя и знаменателя передаточной функции Wsys(s);
wfl=linspace(-3,10) ;— задаём диапазон логарифмических частот (3...10)-100 точек;
for i=l:100
wf(i)=10Awf1(i) ;
end; — задаём диапазон частот ( … )- 100 точек;
Wj=freqs
(Wsysnum,
wsysden,
wf)
; - находим значение деления числителя
на знаменатель функции
 (s)
при подстановке вместо s-
jw
(wf
в данном случае диапазон частот).
(s)
при подстановке вместо s-
jw
(wf
в данном случае диапазон частот).
A=abs(Wj);
B=20*logl0 (А) ; - находим модуль передаточной функции (s) и преобразуем его в область логарифмическую частот с коэффициентом усиления 20.
2) Строим желаемую ЛАЧХ системы:
Проводим среднечастотный участок ЛАЧХ с наклоном - 20дБ через точку соответствующую частоте среза, которую определяем по обобщённой номограмме Солодовникова для астатических систем первого порядка:
 ;
(2.9)
;
(2.9)
 =5с
- берем из условий технического задания.
=5с
- берем из условий технического задания.
 ;
;
 .
.
Исходя из графика зависимости L от перерегулирования, определяем границы, в которых желаемая ЛАЧХ должна следовать с наклоном - 20дБ
L= ±80дБ.
Поскольку диапазон, в котором желаемая ЛАЧХ имеет наклон - 20дБ достаточно велик, а такой наклон соответствует интегрирующему звену, то используем в качестве желаемой ЛАЧХ - ЛАЧХ интегрирующего звена, проходящего через точку, соответствующую частоте среза.
Строим желаемую ЛАЧХ:
wsreza=0. 628;
for i=l:100
Wgel(i)=20*log10(wsreza)-2 0*logl0(wf(i)) ;
end;
3) Строим ЛАЧХ КУ:
Вычитаем из желаемой ЛАЧХ располагаемую ЛАЧХ
for i=l:100
WKY(i)=Wgel(i)-В(i) ;
end ;
4) Составляем передаточную функцию КУ по ЛАЧХ КУ:
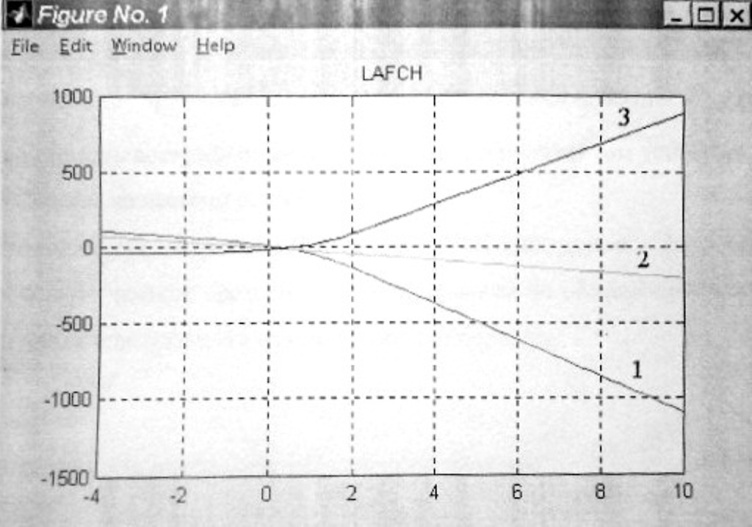
Рисунок 2.23 — Располагаемая, желаемая ЛАЧХ системы и ЛАЧХ КУ, где 1 - располагаемая ЛАЧХ системы; 2 - желаемая ЛАЧХ системы; 3 - ЛАЧХ КУ.
По
ЛАЧХ КУ видно, что излом характеристики
происходит на lg(w1)=-2,
lg(w2)=-1,
lg(wЗ)=0,4
и lg(w4)=1
эти логарифмические частоты соответствуют
частотам (w1=0,01,
w2=0,1,
wЗ=2,5 и w4=10).
До частоты w1
действует пропорциональное звено с
коэффициентом k=
0,02 (т.к. 20*lg(k)=-34),
после частоты w1
наклон характеристики изменяется
на +20дБ,
что соответствует форсирующему звену,
после частоты w2
наклон характеристики изменяется опять
на +20дБ,
после частоты wЗ –на +20дБ, после частоты
w4
- на +40дБ,
что соответствует форсирующему звену
второго порядка. На высоких частотах
(поскольку система высокого порядка
возьмём частоту
 )
желаемую ЛАЧХ направим параллельно
располагаемой, отсюда график корректирующего
устройства будет параллелен оси lgω
. После этой частоты наклон характеристики
измениться на - 100дБ.
)
желаемую ЛАЧХ направим параллельно
располагаемой, отсюда график корректирующего
устройства будет параллелен оси lgω
. После этой частоты наклон характеристики
измениться на - 100дБ.
Находим постоянные времени:
 ;
(2.10)
;
(2.10)
 (2.11)
(2.11)
 ;
(2.12)
;
(2.12)
 ;
(2.13)
;
(2.13)
 .
(2.14)
.
(2.14)
Передаточная функция КУ имеет следующий вид:
 (2.15)
(2.15)