

1. Критерии выбора относительного коэффициента демпфирования.
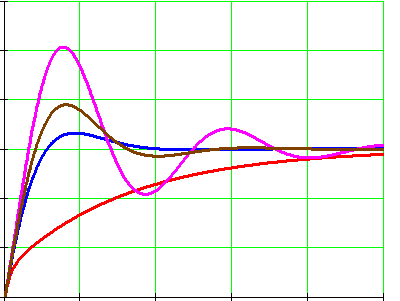
Время переходного процесса:
Теоретически время переходного процесса бесконечно, но на практике оно определяется как момент вхождения процесса в заданную трубку точности.
 Х
Х
![]()

![]()




ХУСТ

![]()
t
![]()

![]()


![]()
![]()

![]()
![]()
![]()
![]()
![]()
![]()
2. Логарифмические частотные характеристики.
Перепишем уравнение (2):
и перейдем к преобразованиям Лапласа при нулевых начальных условиях:
![]()
Произведя
формальную замену
![]() ,
получаем спектральную характеристику
системы:
,
получаем спектральную характеристику
системы:

Эта передаточная функция может быть представлена в виде амплитудной (АЧХ) и фазовой (ФЧХ) характеристик:

![]()
![]()
![]()
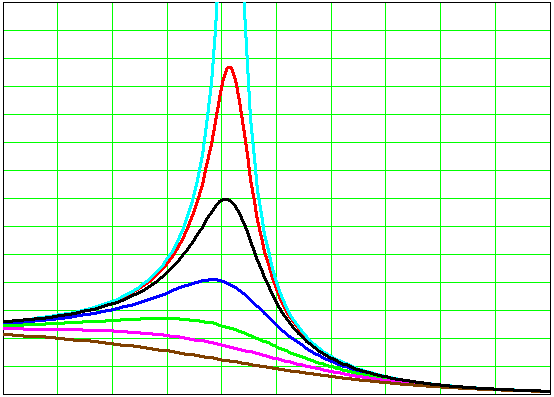
Общий вид логарифмических амплитудных характеристик:

![]()

![]()
 1
1
![]()
t
Существует критерий выбора ξ:
Требования
могут формироваться по амплитуде (![]() ).
Здесь δ
– относительный коэффициент нарастания
колебаний.
).
Здесь δ
– относительный коэффициент нарастания
колебаний.
По фазе: наибольший допустимый угол отставания по фазе в желаемом частотном диапазоне.
При оценке условий работы измерительного устройства с помощью ЛАФЧХ необходимо знать, в каком частотном диапазоне нужно измерять полезный сигнал.
Например, полоса пропускания акселерометра должна бать на порядок выше δ. Следует вопрос: «Какие ξ можно выбрать для обеспечения такого соотношения?»
3. Возможные источники создания сил демпфирования.
Демпфирующие устройства должны создавать условия строго в фазе со скоростью и не оказывать влияния на инерционные и позиционные члены уравнения.

Отсюда следует вывод, что несоблюдение фазы ведет к появлению дополнительных погрешностей в других параметрах.
При подаче сигнала в противофазе получается система возбуждения (неустойчивая).
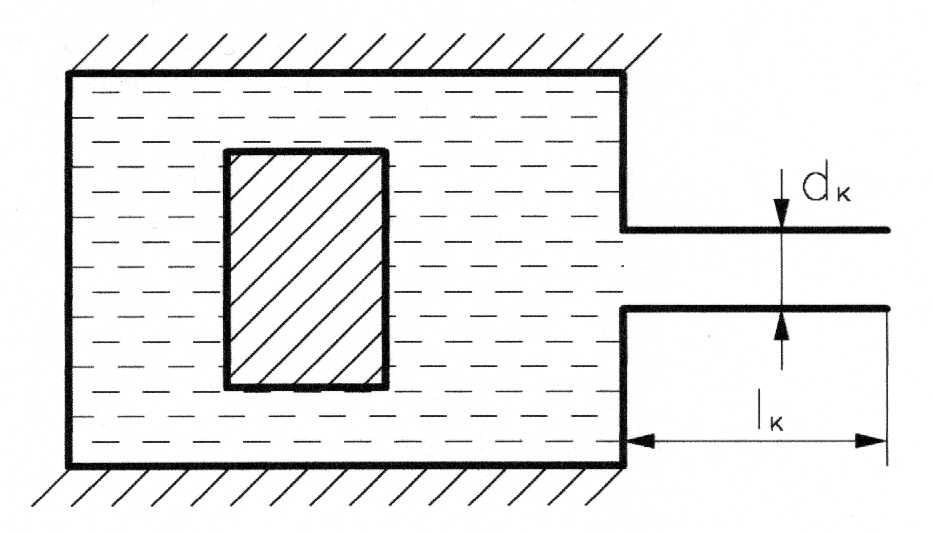
4. Эффекты при демпфировании. Жидкостное демпфирование.




![]()
![]()
 F
F

![]()
![]()
![]() -
демпфирующая сила пропорциональна
линейной скорости движения поршня.
-
демпфирующая сила пропорциональна
линейной скорости движения поршня.
![]()
![]()
Аналогичные рассуждения могут быть проведены для газовой среды. (С поправкой, что газ сжимаем).
Для низких скоростей газ можно считать « жидкостным демпфером ». (Для низкочастотных сил)
Это линейные фильтры:


Стабильность подкачки будет зависеть от фазы подкачки.