

Параметрические преобразователи
![]()
![]() (*)
(*)

x => ΔF => Δх => ΔR

Преобразование физической величины х в электрический сигнал. Для визуализации параметров R, L, C, M к ним надо подвести генератор электрической мощности
(*) К таким цепям применимы законы расчета электроцепей.
1.1 Метод сопротивления.
В этом методе используется зависимость электрического сопротивления резисторов от различных неэлектрических величин.
Например, изменение омического сопротивления проволочного реостата при перемещении скользящего контакта под действием механических сил.
![]()
 -
резистивные.
-
резистивные.
![]() -
потенциометр.
-
потенциометр.
Т ензометрический.
ензометрический.
![]() (тензорезистивные)
(тензорезистивные)
Тензометрические датчики удлинений и растяжений являются пассивными резистивными чувствительными элементами и служат для измерения удлинения или сжатия - величин, пропорциональных деформации вспомогательного элемента(пружины).
Емкостный метод.
Изменение ёмкости С конденсатора можно осуществить путем изменения расстояния d между электродами, эффективной площади S электродов и диэлектрической постоянной диэлектрика.
В простейшем случае емкостный преобразователь
состоит из двух параллельных пластин,
разделенных воздушным диэлектриком,
причем перемещение одной из пластин
вызывает изменение ёмкости конеденсатора.
простейшем случае емкостный преобразователь
состоит из двух параллельных пластин,
разделенных воздушным диэлектриком,
причем перемещение одной из пластин
вызывает изменение ёмкости конеденсатора.
![]()

![]() -диэлектрическая
абсолютная проницаемость вакуума.
-диэлектрическая
абсолютная проницаемость вакуума.
![]() -относительная
диэлектрическая проницаемость вакуума.
-относительная
диэлектрическая проницаемость вакуума.
![]()
Индуктивный метод.
Используется свойство катушки изменять своё реактивное сопротивление при изменении некоторых её параметров, определяющих величину индуктивности.
Если катушка, индуктивность которой изменяется пропорционально измеряемой неэлектрической величине, включена в электрическую цепь, то по изменению силы тока в цепи или напряжения на клеммах прибора можно судить об этой величине.
Y![]() -
Индуктивный преобразователь.
-
Индуктивный преобразователь.
![]() -
Взаимоиндуктивный
- трансформаторный датчик.
-
Взаимоиндуктивный
- трансформаторный датчик.
![]()

![]()
W - число витков.
Rм- магнитное сопротивление среды, по которому замыкаются силовые линии электромагнитного поля.
1.4 Оптоэлектронный преобразователь с открытым отрицательным каналом.


1.5 Струнные преобразователи
В этих преобразователях изменяется параметр натяжения нити.

![]() ;
;
![]() ;
;
![]() ;
;
![]()
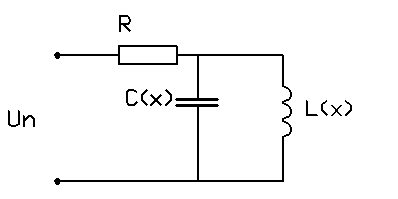
2. Генераторные преобразователи
(*)
![]() L
= const
L
= const
C = const
R = var
![]()
Для параметрических преобразователей обязательно наличие внешнего источника энергии с Un = const.
![]()
![]()
![]()
2.1. Генераторные фотопреобразователи.
В фотоэлектрических методах измерения используются различные электрические эффекты, возникающие при освещении некоторых материалов световыми лучами. Энергия светового потока преобразуется в электрическую энергию.
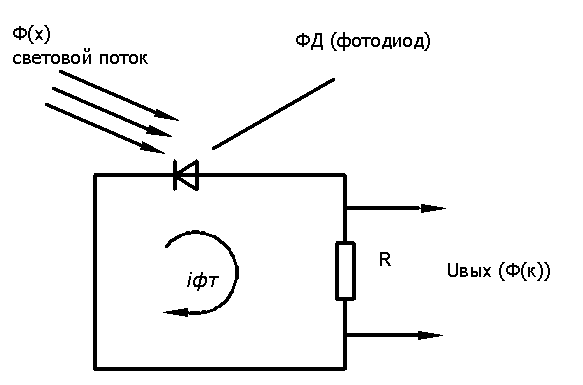
Uвых
=> ΔU(Ф(х))
В качестве нагрузки может служить измерительный прибор, реле.

U0=V0+URH
![]()
Ri = высокое внутреннее сопротивление Фотодиод
Зависимость силы фототока i от напряжения при различных значениях светового потока Ф.

Световой поток может меняться в том числе и при смещении маятника ЧЭ акселерометра

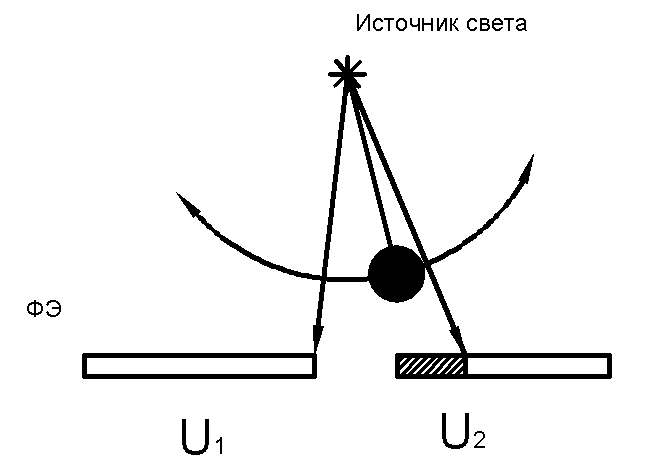
Данная схема используются во многих акселерометрах, она восприимчива к субмикронным смещениям, кроме того не механического воздействия на подвижные элементы