

1.2. Поиск в ширину в пространстве состояний. Поиск путей-кандидатов
1.2.1. Рекурсивная процедура поиска в ширину
Поиск в глубину хорошо работает в таких пространствах состояний, где и тупики, и решения удалены примерно на одно и то же расстояние от начала поиска. Наиболее плохой случай для поиска в глубину следующий: какая-то ветвь графа состояний очень протяженная или бесконечная, а решения находятся на других ветках, на небольшом расстоянии от начала поиска.
Для таких пространств более эффективен поиск в ширину. Если в глубине на каждом шаге имеется ровно один путь-кандидат в решение, то в ширине таких путей-кандидатов несколько.
Рассмотрим поиск в ширину на модельном графе (рис. 2).
1
5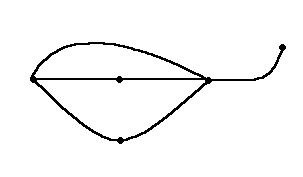
Р
3
2
4
Начнем поиск в ширину из вершины 1 — имеем начальный путь [1]. Просмотрели вершины 2, 3, 4 смежные с вершиной 1 — получили пути-кандидаты [[2, 1], [3, 1], [4, 1]]. Каждый из них в свою очередь может дать несколько продолжений и т.д.
Будем на каждом шаге хранить список путей-кандидатов. Новой будет считаться любая вершина, не содержащаяся в текущем пути, поэтому, добавив к главной цели fail, можно сгенерировать все пути в порядке возрастания их длин.
Первым аргументом процедуры width будет текущий список путей-кандидатов, вторым — окончательный путь-решение. Каждый новый путь становится головой списка путей кандидатов.
width(Ways,Sol), где Ways — список путей, Sol — решение.
Граничное условие рекурсии
width([[Z|Was]|T],[Z|Was]):-
end(Z).
[Z|Was] — путь-решение, который окончился целевой вершиной Z.
width([[X|Was]|T],Sol):-
findall(Way,continue(X,Was,Way),LC),
conc(T,LC,T1),!,
width(T1,Sol).
Findall собирает в список LC все продолжения пути [X|Was] на один шаг, и ширина вызывается с новым списком путей T1.
Продолжение пути на один шаг производится в процедуре continue.
continue(X,T,[Y,X|T]):-
go(X,Y),
not(member(Y,T)).
Если вершина X тупиковая, то findall вернет список LC=[]. Путь [X|Was] будет удален из списка путей-кандидатов и произойдет вызов width с T1=T.
Если все пути-кандидаты тупиковые и не содержат целевых вершин, то width будет вызвана с пустым списком и вернет неудачу. Так как отсечение блокирует возвраты, то неудачу вернет и самый первый вызов width из solve.
1.2.2. Множества начальных вершин, прямой и обратный поиск
Пусть начальное состояние не единственное. При поиске в глубину будем последовательно вызывать процедуру из каждого начального состояния:
solve([H|T]):-
depth(H,Sol).
solve([_|T]):-
solve(T).
При поиске в ширину образуем из начальных вершин начальные пути и соберем их в список: L0 — список начальных вершин, W0 — список начальных путей.
solve(L0):-
findall(Was,make_way(X,L0,Way),W0),
width(W0,Sol).
make_way(X,L0,[X]):-
member(X,L0).
Если начальных состояний довольно много, а конечное одно, удобно производить поиск обратный поиск — от конечного к начальному. Если ходы в пространстве не обратимы, то вместо процедуры go может потребоваться обратная процедура go1. Кроме того, поиск в ширину можно сделать двунаправленным — для просмотра меньшей области пространства.
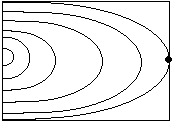
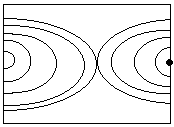
Рисунок 3. Обратный и двунаправленный поиск в ширину
Задание. Написать программу составления упорядоченного плана перестановок кубиков за минимальное число шагов с помощью поиска в ширину в пространстве состояний. Определить ее вычислительную сложность, то есть, как быстро будет расти число шагов, производимых алгоритмом, при неограниченном увеличении размерности пространства состояний.