

Управляющие устройства
В настоящее время для управления объектами мясной промышленности нашли применение следующие устройства:
- регулирующие блоки (автоматические регуляторы),
- управляющие ЭВМ, микропроцессоры и микроконтроллеры,
- электроконтактные схемы управления,
- логические схемы управления, выполненные на элементах электроники и пневмоники.
Автоматические регуляторы. Общие понятия. Классификация.
Регулирующие блоки (устройства) предназначены для сравнения текущего значения регулируемой величины с заданным и при наличии рассогласования выработки управляющего воздействия с целью его устранения.
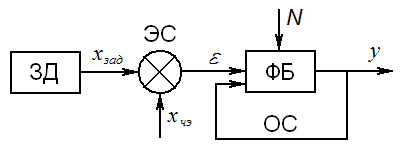
Функциональная схема регулирующего блока:
ЗД – задатчик;
ЭС – элемент сравнения;
ОС – обратная связь;
хзад – заданное значение регулируемой величины;
хд – текущее значение регулируемой величины;
= хзад – хд – рассогласование;
у – управляющее воздействие;
N – вспомогательная энергия
Классификация регуляторов:
1) по принадлежности к ветви ГСП: электрические, пневматические, гидравлические;
2) по использованию вспомогательной энергии:
а) без использования вспомогательной энергии – регуляторы прямого действия; для выработки управляющего воздействия используют энергию регулируемой среды (давление, перемещение);
б) с использованием вспомогательной энергии – регуляторы с усилением, формирующие сигнал на выходе за счет дополнительного источника энергии.
3) по характеру выработки регулирующего воздействия:
а) прерывистые (дискретного действия): релейные и импульсные;
(У первых сигнал изменяется скачком и имеет на выходе толко два значения: максимальное и минимальное (позиционные регуляторы). У вторых выходной сигнал принимает последовательность импульсов во времени.)
б) непрерывные.
4) По характеру изменения управляющего воздействия (по виду характеристики действия):
а) нелинейные (позиционные регуляторы);
б) линейные, которые разделяются по законам регулирования
5) По наличию обратной связи:
а) без обратной связи;
б) с обратной связью.
(Закон регулирования – математическая зависимость между значением выходного параметра ИУ).
6) По виду регулирующего параметра: (регуляторы температуры, давления расхода, уровня и т.д.)
Позиционные регуляторы.
Работают по принципу «вкл. – выкл.».Непрерывному изменению входной величины в них соответствует скачкообразное изменение выходного сигнала.
Их реализация осуществляется с помощью контактных и бесконтактных релейных элементов. Бывают двухпозиционные, трехпозиционные и реже многопозиционные регуляторы.
Рассмотрим статические характеристики этих регуляторов.
Структурная схема двухпозиционного регулятора
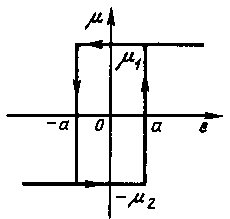
а) без зоны неодназначности б) с зоной неодназначности
Двухпозиционные регуляторы настраиваются таким образом, чтобы значения y и отсчитывались в приращениях от условного равновесного состояния объекта регулирования, соответствующего расчетным значениям yо и о, принятым за начало отсчета. Аналитически статические характеристики можно записать следующим образом:
а) y = ymax при 0 б) y = ymax при ;
y = - ymax при 0 при - и ddt 0
y = - ymax при - ;
при - и ddt 0.
Из этих выражений и рисунков видно, что двухпозиционные регуляторы постоянно оказывают на объект регулирования воздействия отличные от значений необходимых для равновесного состояния системы (когда = 0). В результате АСР с таким регулятором будет работать в автоколебательном режиме и ее переходный процесс будет колебательным в окрестностях ее равновесного состояния. Настраиваемая зона неоднозначности в них называется зоной возврата.
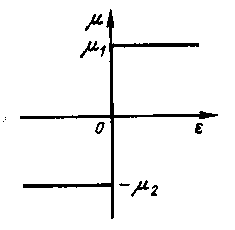
Статические характеристики трехпозиционных регуляторов выглядят следующим образом:
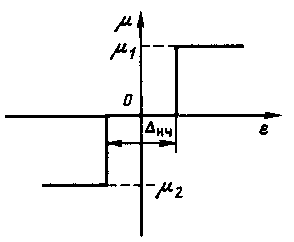
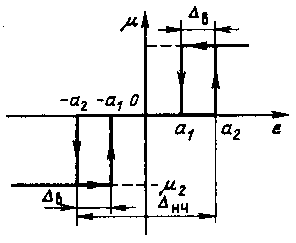
а) без зоны неоднозначности б) с зоной неоднозначности
где нч - зона нечувствительности. Здесь имеется устойчивое нейтральное положение.
Из этих рисунков следует, что трехпозиционные регуляторы имеют устойчивое состояние (y = 0) в окрестностях равновесного состояния системы (когда = 0), определяемых зоной нечувствительности и зоной неоднозначности. Если при очередном переключении регулятора в состояние y = 0 , отклонение регулируемой величины не будет выходить за зону нечувствительности регулятора, то в этом состоянии система регулирования может оставаться бесконечно долго. В системе не будет автоколебательных процессов (не подгорают контакты, увеличивается срок службы).
Позиционными эти регуляторы называются потому, что регулирующий орган занимает в двухпозиционных регуляторах два положения (позиции) – открыто – закрыто, а в трехпозиционных три положения: открыто, закрыто и промежуточное.
Позиционные регуляторы несложны по конструкции, надежны в работе, просты в обслуживании и настройке. Их применяют на объектах с малым инерционным запаздыванием. Часто встраивают во вторичные приборы.
Настроечные параметры: зона возврата и зона нечувствительности.
Линейные регуляторы непрерывного действия.
Выход у линейных регуляторов описывается дифференциальными уравнениями. Промышленностью серийно регуляторы, которые реализуют пять законов регулирования:
П – пропорциональные;
И – интегральные;
ПИ – пропорционально-интегральные;
ПД – пропорционально-дифференциальные;
ПИД – пропорционально-интегрально-диффиренциальные.
В этих регуляторах предусматривается возможность изменения некоторых коэффициентов их дифференциальных уравнений, называемых параметрами настройки регулятора. Такими параметрами настройки являются:
- коэффициент передачи (усиления) регулятора;
- постоянная времени интегрирования;
- постоянная времени дифференцирования;
- постоянная времени изодрома;
- постоянная времени предварения;
Изменяя значения этих параметров, меняют тем самым динамические характеристики регулятора с целью обеспечения качества работы АСР в целом. Значения, при которых достигаются лучшее качество работы системы, называются оптимальными.
Пропорциональные.
Передаточная функция W(р) = k (закон регулирования – y = k)
где - рассогласование;
k – коэффициент усиления (передачи).
Настроечный параметр такого регулятора – предел пропорциональности:
= (1k) 100 %,
который показывает, какому отклонению регулируемой величины (в % от максимально возможной для данной АСР) соответствует перемещение регулирующего органа из одного крайнего положения в другое.
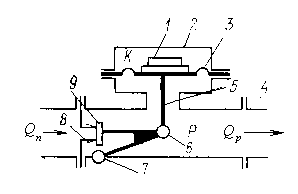
Рассмотрим
пропорциональный регулятор давления
прямого действия 
Промышленные П- регулирующие устройства состоят из усилителя, охваченного отрицательной обратной связью с коэффициентом усиления.
k1






(отр.
ОС)
k2


В нашем примере усилительное звено имеет передаточную функцию W(p) = k1 и
обратная
связь коэффициент усиления k2.
Тогда
передаточная функция регулятора
определится следующим выражением
![]() ,
,
где Wп(p), Wо(p) – передаточные функции прямой и обратной связей соответственно.
Подставляя значения передаточных функций в выражение, получим
 .
Т.к. k1
1, то 1/k2
0 1.
.
Т.к. k1
1, то 1/k2
0 1.
Тогда
![]() .
.
Достоинство – быстродействие, недостаток - наличие статической ошибки.
Интегральные.
Передаточная функция W = 1/(Тир) или W = k/р (закон – y = (1/Ти) dt)
где Ти – постоянная интегрирования, а 1/Ти часто обозначают как коэффициент передачи k. Параметром настройки регулятора является постоянная времени интегрирования или k.
Рассмотрим интегральный регулятор давления прямого действия
Промышленные И- регулирующие устройства реализуются путем охвата инерционного звена первого порядка с коэффициентом усиления равным единице положительной статической обратной связью. (Статической обратной связью называется такая связь, передаточная функция которой равна 1) Т.е. структурная формула выглядит следующим образом:

![]()
(пол.
ОС)
1
г де k1 = 1.
Тогда передаточная функция регулятора
определится
выражением
![]() ,
,
где Wп(p), Wо(p) – передаточные функции прямой и обратной связей
соответственно.
Подставляя значения передаточных функций
в
выражение, получим
 .
.
Пропорционально-интегральные.
Передаточная функция W = k + 1/(Тир) (закон регулир-я – y = k + (1/Ти) dt)
Если при настройке регулятора установить большое значение Ти , то он превратиться в П-регулятор.
ПИ-регулятор имеет следующую структурную схему
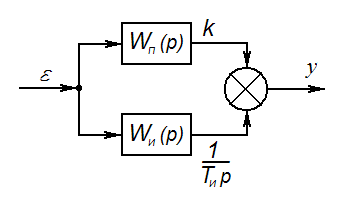
Т.е. промышленно эти регуляторы состоят из двух параллельно включенных звеньев: усилительного и интегрирующего.
Кроме этой на практике применяется следующая структурная схема ПИ-регулятора. Данная схема реализует закон вида
y = k[ + (1/Тиз) dt] ,
где Тиз - время изодрома.
Передаточная функция регулятора W(p) = k[1 + 1/(Тизр)] .
Т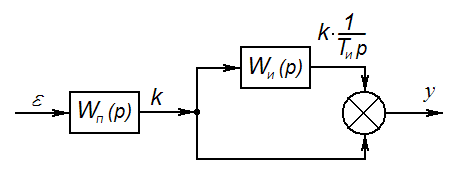 аким
образом такой регулятор имеет
взаимосвязанные параметры настройки
статической и астатической частей по
коэффициенту усиления k
, т.к. при его настройке изменяться
постоянная времени интегрирования. Как
видно из приведенных выражений Т
= Тиз /
k
. В первой
модели при изменении коэффициента
усиления скорость нарастания интегральной
составляющей не изменится, во второй
она изменится пропорционально.
аким
образом такой регулятор имеет
взаимосвязанные параметры настройки
статической и астатической частей по
коэффициенту усиления k
, т.к. при его настройке изменяться
постоянная времени интегрирования. Как
видно из приведенных выражений Т
= Тиз /
k
. В первой
модели при изменении коэффициента
усиления скорость нарастания интегральной
составляющей не изменится, во второй
она изменится пропорционально.
Графически законы приведенных регуляторов и будут выглядеть следующим образом: 1 – классический вариант, 2 – с общим коэффициентом усиления.
И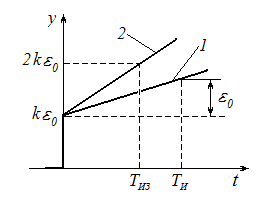 з
графика видно, что время изодрома - это
время за которое произойдет увеличение
пропорциональной составляющей в два
раза при действии только интегральной
составляющей. Как видно из графиков
быстродействие регуляторов с общим
коэффициентом выше, причем скорость
нарастания интегральной составляющей
с увеличением коэффициента усиления
будет возрастать.
з
графика видно, что время изодрома - это
время за которое произойдет увеличение
пропорциональной составляющей в два
раза при действии только интегральной
составляющей. Как видно из графиков
быстродействие регуляторов с общим
коэффициентом выше, причем скорость
нарастания интегральной составляющей
с увеличением коэффициента усиления
будет возрастать.
Пропорционально-дифференциальные и пропорционально-интегрально-дифференциальные регуляторы.
При наличии дифференциальной составляющей выходной сигнал регулятора изменяется относительного входного сигнала с некоторым опережением равным d/dt и дальнейшем его уменьшении со временем. Когда опережение становится равным 0, выходной сигнал не изменяется, т.е. y = 0.
Законы ПД и ПИД в дифференциальной форме имеют следующий вид
ПД
–
![]() ,
ПИД –
,
ПИД –
![]() .
.
Передаточные функции этих регуляторов определяются следующими
выражениями
![]() ,
,
![]() ,
,
Эти промышленные регуляторы образуются путем параллельного соединения динамических звеньев: ПД - пропорционального и дифференциального, ПИД - пропорционального, интегрального и дифференциального. Если у ПИД регулятора устанавливать k = 0, Ти = 0 и Тд = 0 в различном сочетании, то можно получать П, И, ПИ, ПД-законы регулирования.
Также, как и для закона ПИ- регулирования, структурные схемы ПД и ПИД-регуляторов могут быть реализованы с общим коэффициентом усиления.