

Автоматическое управление Классификация и характеристики объектов регулирования
Автоматическая система регулирования в простейшем случае состоит из регулятора и объекта управления.
Объекты управления в зависимости от динамических свойств, т.е. от вида переходного процесса, подразделяются на объекты с сосредоточенными параметрами и распределенными параметрами. (Переходный процесс – это изменение выходной величины во времени. Обычно в автоматизации его рассматривают после нанесения возмущающего воздействия.)
Если регулируемая величина в состоянии равновесия имеет везде одинаковые значения, то такой объект называется объектом с сосредоточенными параметрами (варочная колона, шнековая камера).
Е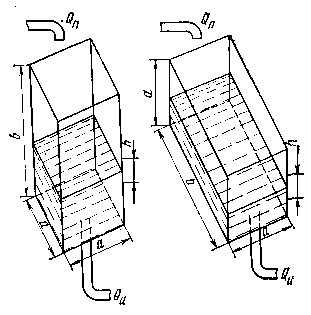 сли
регулируемая величина в состоянии
равновесия имеет неодинаковые значения,
т.е. характеризуются не только изменением
во времени, но и в пространстве, то такой
объект называется объектом с распределенными
параметрами (термокамера для обработки
колбасных изделий, пастеризационная
установка, трубопроводы).
сли
регулируемая величина в состоянии
равновесия имеет неодинаковые значения,
т.е. характеризуются не только изменением
во времени, но и в пространстве, то такой
объект называется объектом с распределенными
параметрами (термокамера для обработки
колбасных изделий, пастеризационная
установка, трубопроводы).
Свойство объекта накапливать вещество или энергию называется емкостью.
Два бака одинакового объема, но с разной площадью оснований. Для изменения уровня жидкости в них на равную величину h, требуется различное ее количество, которое и будет характеризовать емкость объекта, т.е. способность накапливать вещество.
В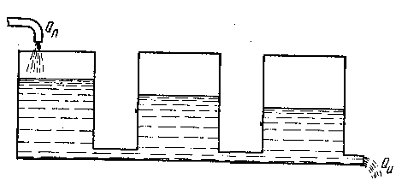 области автоматического регулирования
понятие «емкость» означает не только
способность вмещать что-либо, но и само
оборудование, в котором может накапливаться
вещество или энергия. В зависимости от
их числа различают одноемкостные
(бункер, накопительный бак), двухемкостные
(змеевиковый теплообменник) и многоемкостные
объекты (ректификационная колонна).
области автоматического регулирования
понятие «емкость» означает не только
способность вмещать что-либо, но и само
оборудование, в котором может накапливаться
вещество или энергия. В зависимости от
их числа различают одноемкостные
(бункер, накопительный бак), двухемкостные
(змеевиковый теплообменник) и многоемкостные
объекты (ректификационная колонна).
Модель многоемкостного объекта можно представить в виде последовательного соединения нескольких емкостей.
Одноемкостные объекты описываются дифференциальными уравнениями первого порядка, двухемкостные – второго порядка и многоемкостные – уравнениями более высоких порядков. Т.о. у первых скорость изменения выходной величины при подаче на вход ступенчатого воздействия постоянная или непрерывно уменьшается с течением времени от максимального, соответствующему начальному моменту времени, до нуля.
А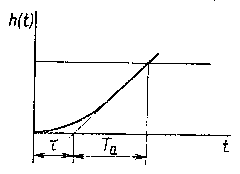
 у остальных – скорость изменения выхода
нарастает от минимального до максимального,
а потом либо остается неизменной, либо
убывает до нуля.
у остальных – скорость изменения выхода
нарастает от минимального до максимального,
а потом либо остается неизменной, либо
убывает до нуля.
Свойство объекта возвращать выходную величину к состоянию равновесия без регулятора называется самовыравниваением, а такие объекты носят название статических или объектов с самовыравниванием.
Н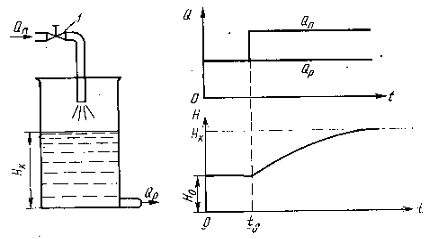 е
обладающие таким свойством объекты
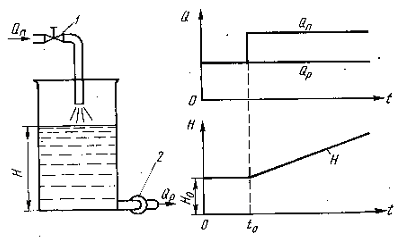
носят название астатических.
е
обладающие таким свойством объекты
носят название астатических.
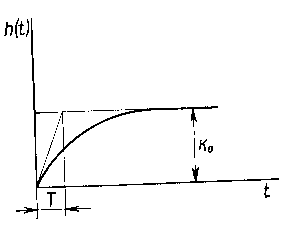
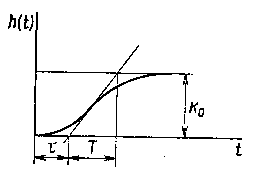
Кривая разгона объекта – это зависимость изменения регулируемой величины во времени после нанесения ступенчатого воздействия.
Если объект обладает свойством запаздывание, то при изменении входной величины изменение выходной величины произойдет не мгновенно, а через некоторое время. Различают транспортное и емкостное запаздывания.
Т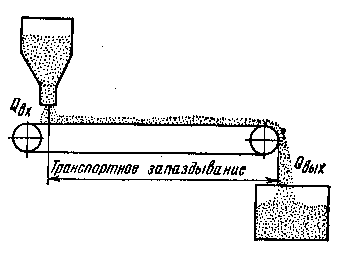 ранспортное
запаздывание возникает при наличии
участков объекта, требующих определенного
времени для распространения по ним
выходного сигнала (к примеру: изменение
расхода на транспортере).
ранспортное
запаздывание возникает при наличии
участков объекта, требующих определенного
времени для распространения по ним
выходного сигнала (к примеру: изменение
расхода на транспортере).
Емкостное запаздывание вводится в дифференциальное уравнение одноемкостного объекта при аппроксимации им динамической характеристики многоемкостного объекта. Величина емкостного запаздывания определяется отрезком на оси абсцисс, отсекаемым касательной, проведенной к кривой разгона в точке ее перегиба.
К характеристикам объектов регулирования (переходного процесса, кривой разгона) относятся также время переходного процесса и постоянная времени объекта, время разгона, коэффициент усиления (передачи).
Время переходного процесса – это время за которое выходная величина (объекта) достигнет нового установившегося значения.
Постоянная времени объекта – это время за которое выходная величина достигнет нового установившегося значения, если бы она изменялась (весь промежуток, отрезок времени) с (постоянной) максимальной скоростью. (Она характеризует среднее время в течении которого каждый элементарный объем из потока отрабатываемого вещества удерживается в объекте регулирования.)
Коэффициент усиления показывает во сколько раз выходной сигнал отличается от входной величины в установившемся состоянии, т.е. характеризует чувствительность выходной величины объекта к входной. Может быть выражен как в размерном, так и безразмерном виде.
Постоянная времени характеризует инерционность объекта. Для экспоненциального процесса постоянная времени численно равна длине отрезка экспоненциальной кривой, заключенного между ординатой, проходящую через любую точку этой кривой, в которой проведена касательная, и точкой пересечения этой касательной с асимптотой.
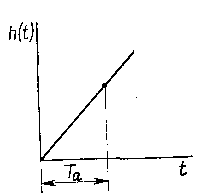
Время разгона одноемкостного астатического объекта есть время, в течении которого регулируемая величина изменится от нуля до номинального своего значения при постоянной максимальной скорости изменения, соответствующей наибольшему небалансу.